


![三氟甲基嘧啶三氮唑铜[I]配合物发光材料及制备方法](https://www.zhichawang.com/images/10/CN106432291A/CN106432291A.jpg)


专利摘要
本实用新型公开了一种可回收驾驶员转向能量的线控转向系统,包括:机械传动模块、控制模块、能量回收模块、电源、路感调节模块和电流调节模块;该系统利用发电机工作时产生的阻力矩作为线控转向路感的来源,同时利用原有路感电机进行路感的调节,能够实现为驾驶员提供良好路感的同时,回收驾驶员转向输出的能量。
权利要求
1.一种可回收驾驶员转向能量的线控转向系统,其特征在于,包括:机械传动模块、控制模块、能量回收模块、电源、路感调节模块和电流调节模块;
所述机械传动模块包括:方向盘、转向轴、转向电机、循环球转向器、转向摇臂、转向拉杆和车轮;
转向轴的输入端与所述方向盘相连;
循环球转向器的输入端与所述转向电机相连,输出端与所述转向摇臂的输入端相连;
转向拉杆的输入端与所述转向摇臂的输出端相连,输出端与所述车轮相连;
所述控制模块包括:方向盘转角传感器、转矩传感器、车速传感器、前轮转角传感器、质心侧偏角传感器、横摆角速度传感器、路感控制器、转向执行控制器和滤波模块;
转向执行控制器的控制输出端与所述转向电机的控制输入端电气相连,且转向执行控制器与所述路感控制器通过信号共享总线,实现信号共享;
方向盘转角传感器安装在所述方向盘上,与所述路感控制器电气相连;
转矩传感器安装在所述转向轴上,与所述路感控制器电气相连;
车速传感器和前轮转角传感器安装于所述车轮上,均与路感控制器电气相连;
横摆角速度传感器与所述路感控制器电气相连;
质心侧偏角传感器与所述路感控制器电气相连;
滤波模块的输入端与所述路感控制器的控制输出端电气相连;
所述能量回收模块包括:发电机、整流器和超级电容;
发电机的输入端与所述转向轴的输出端相连,输出端与所述整流器的输入端电气连接;
整流器的输出端与所述超级电容电气相连;
超级电容的信号输出端与所述路感控制器相连;
所述电源用于给系统供电;
所述路感调节模块包括:路感电机、蜗轮蜗杆减速器;
蜗轮蜗杆减速器的输入端与所述路感电机的输出端相连,输出端与所述转向轴相连;
电流调节模块的控制输入端与所述滤波模块电气相连,供电输入端分别与所述电源的输出端和所述超级电容的供电输出端电气相连,输出端与所述路感电机电气相连。
2.根据权利要求1所述的可回收驾驶员转向能量的线控转向系统,其特征在于,所述整流器中包含:可将发电机产生的波动较大的交流电整流成比较平稳的直流电的整流滤波电路。
3.根据权利要求1所述的可回收驾驶员转向能量的线控转向系统,其特征在于,所述超级电容为双电层超级电容器。
4.根据权利要求1所述的可回收驾驶员转向能量的线控转向系统,其特征在于,所述供电切换条件为当超级电容的SOC大于0.6时切换为使用超级电容供电,当超级电容的SOC小于0.2时,使用电源供电。
说明书
技术领域
本实用新型属于汽车转向系统技术领域,具体指代一种可回收驾驶员转向能量的线控转向系统。
背景技术
汽车转向系统是决定汽车主动安全性的关键总成,传统汽车转向系统是机械系统,汽车的转向运动是由驾驶员操纵方向盘,通过转向器和一系列的杆件传递到转向车轮而实现的。汽车线控转向系统取消了方向盘与转向轮之间的机械连接,完全由电能实现转向,摆脱了传统转向系统的各种限制,不但可以自由设计汽车转向的力传递特性,而且可以设计汽车转向的角传递特性,给汽车转向特性的设计带来无限的空间,是汽车转向系统的重大革新。
目前在线控转向系统中多是增设一套路感模拟装置,在汽车行驶过程中,根据实时路面反馈由控制器控制路感电机为驾驶员提供一定的转向路感,但是同时增设一套电机机构会给系统带来额外的能量消耗。
由目前可在生能源的不断消耗,各大企业在进行汽车制造时都在想办法保障汽车的经济性,目前实行最多的还是在汽车行驶过程中进行能量回收,而比较成功的实行办法就是制动能量回收系统,具体指一种应用于汽车或者轨道交通上,能够将制动时产生的热能转换成机械能,并将其存储在电容器内,在使用时可迅速将能量释放的系统。
综合来看,目前在线控转向系统中由于路感电机的存在导致了多余的能量消耗,同时如果电机发生故障,驾驶员没有了路感的来源,会导致驾驶员对当前的操纵行为没有反馈而产生驾驶风险。
实用新型内容
针对于上述现有技术的不足,本实用新型的目的在于提供一种可回收驾驶员转向能量的线控转向系统,以解决现有技术中存在的多余能量消耗、无冗余性等问题。本实用新型在原有系统中增设一套发电机构,可在转向过程中,回收一定的能量,并将其存储在超级电容中,在下一次路感模拟过程可用于供电,保证了系统的经济的同时解决了原有系统能量多余消耗的问题。同时,由于增设了发电机,使得系统中能够提供路感力矩的机构变为了两个,因此在路感电机故障时发电机也能够提供一定的路感,提升了路感模拟机构的冗余性。
为达到上述目的,本实用新型采用的技术方案如下:
本实用新型的一种可回收驾驶员转向能量的线控转向系统,包括:机械传动模块、控制模块、能量回收模块、电源、路感调节模块和电流调节模块;
所述机械传动模块包括:方向盘、转向轴、转向电机、循环球转向器、转向摇臂、转向拉杆和车轮;
转向轴的输入端与所述方向盘相连;
循环球转向器的输入端与所述转向电机相连,输出端与所述转向摇臂的输入端相连;
转向拉杆的输入端与所述转向摇臂的输出端相连,输出端与所述车轮相连;
所述控制模块包括:方向盘转角传感器、转矩传感器、车速传感器、前轮转角传感器、质心侧偏角传感器、横摆角速度传感器、路感控制器、转向执行控制器和滤波模块;
转向执行控制器的控制输出端与所述转向电机的控制输入端电气相连,且转向执行控制器与所述路感控制器通过信号共享总线,实现信号共享;
方向盘转角传感器安装在所述方向盘上,与所述路感控制器电气相连;
转矩传感器安装在所述转向轴上,与所述路感控制器电气相连;
车速传感器和前轮转角传感器安装于所述车轮上,均与路感控制器电气相连;
横摆角速度传感器与所述路感控制器电气相连;
质心侧偏角传感器与所述路感控制器电气相连;
滤波模块的输入端与所述路感控制器的控制输出端电气相连;
所述能量回收模块包括:发电机、整流器和超级电容;
发电机的输入端与所述转向轴的输出端相连,输出端与所述整流器的输入端电气连接;
整流器的输出端与所述超级电容电气相连;
超级电容的信号输出端与所述路感控制器相连;
所述电源用于给系统供电;
所述路感调节模块包括:路感电机、蜗轮蜗杆减速器;
蜗轮蜗杆减速器的输入端与所述路感电机的输出端相连,输出端与所述转向轴相连;
电流调节模块的控制输入端与所述滤波模块电气相连,供电输入端分别与所述电源的输出端和所述超级电容的供电输出端电气相连,输出端与所述路感电机电气相连。
优选地,所述整流器中包含:可将发电机产生的波动较大的交流电整流成比较平稳的直流电的整流滤波电路。
优选地,所述超级电容为双电层超级电容器。
优选地,在选取所述发电机时,要保证在线控系统工作时,发电机产生的等效在转向轴上的转矩要大于驾驶员输入的转矩。
优选地,所述供电切换条件为当超级电容的SOC大于0.6时切换为使用超级电容供电,当超级电容的SOC小于0.2时,使用电源供电。
优选地,所述滤波模块用于消除路面上的随机干扰力矩对路感模拟控制的影响。
本实用新型的有益效果:
1、本实用新型在原有线控转向的基础上添加一套发电机构,可实现转向过程中的能量回收,虽然路感电机仍会耗费一部分能量,但由于回收能量多余消耗能量,使得路感模拟过程基本不产生多余能量消耗,提升系统经济性的同时可实现对驾驶员生物能的回收;
2、本实用新型由于存在路感电机和发电机两个路感转矩发生装置,大大提高了线控转向系统路感模拟模块的冗余性,使得驾驶员在任何状况下都能够得到驾驶反馈,提高驾驶安全性;
3、本实用新型在路感电机故障时,驾驶员路感完全由发电机提供,此时由于路感电机不工作,会使得转矩有一定的突变,可对驾驶员起预警作用。
附图说明
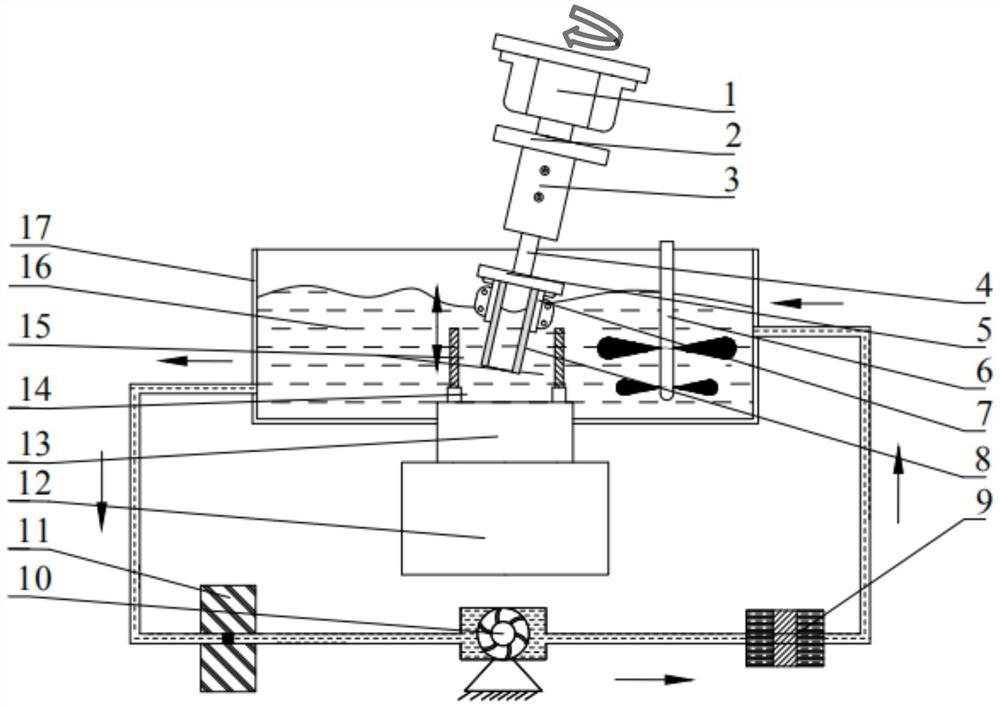
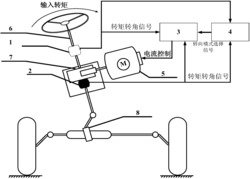
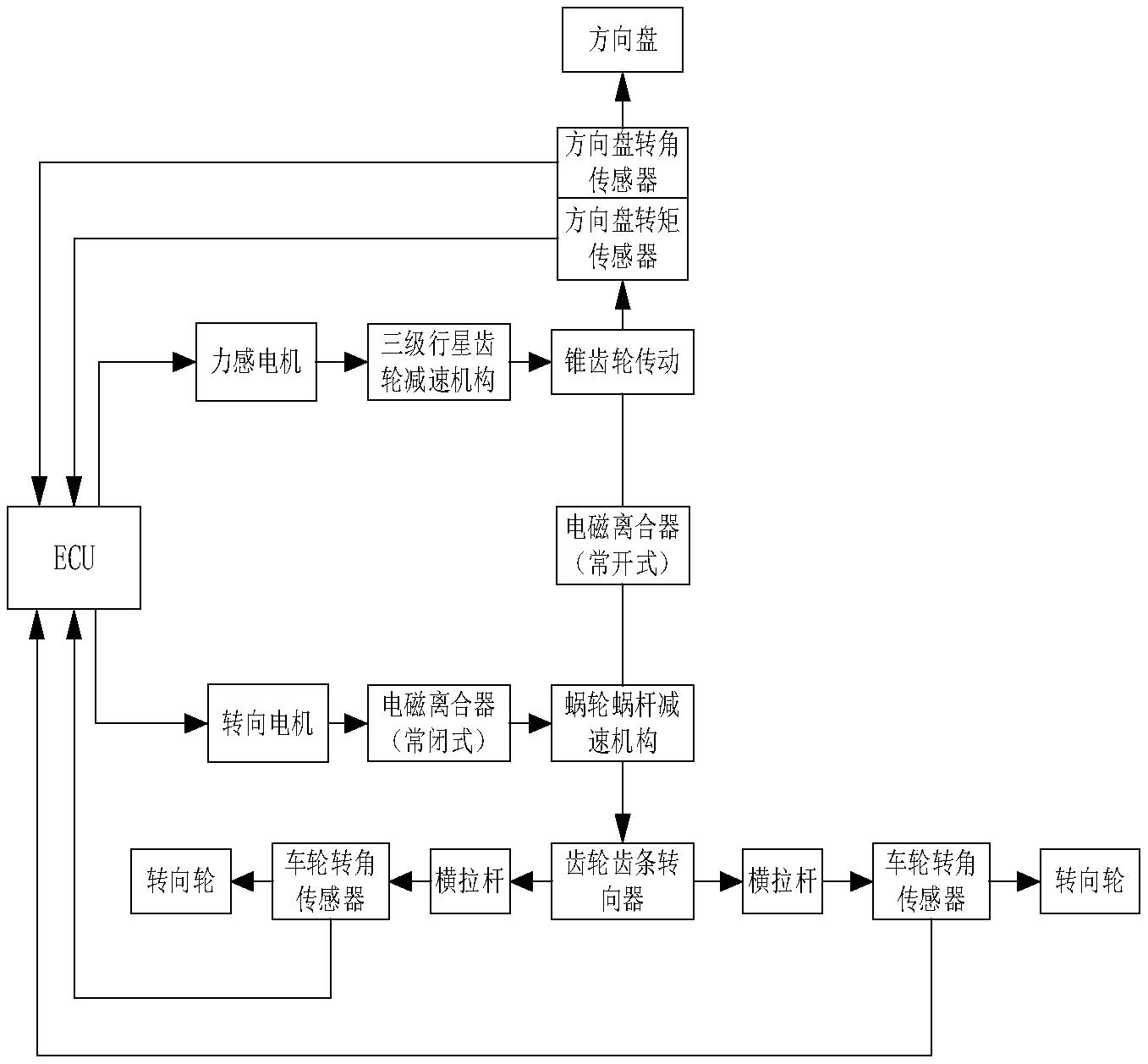
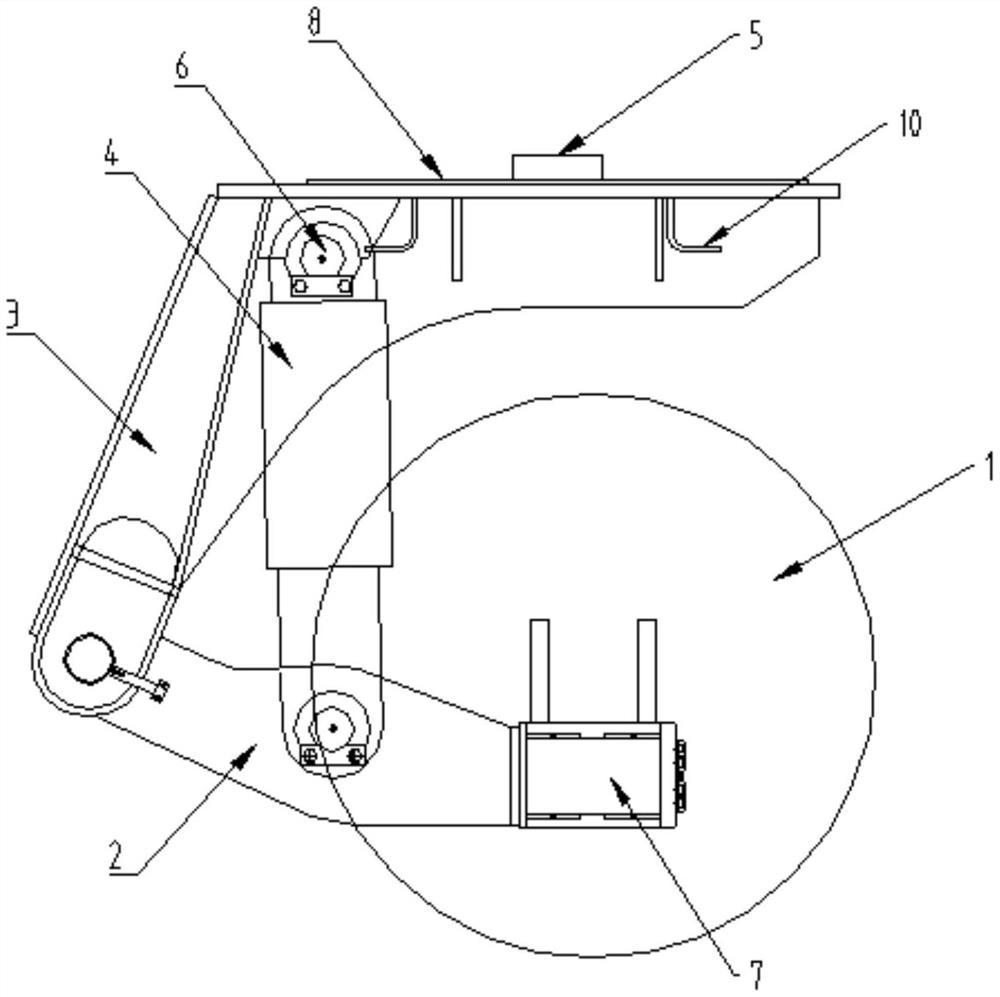
图1为本实用新型的系统结构图;
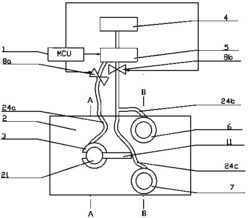
图2为本实用新型的整流器中整流滤波电路图;
图3为本发明的助力特性模型曲线;
图中,1-横摆角速度传感器,2-质心侧偏角传感器,3-路感控制器,4-滤波模块,5-电流调节模块,6-电源,7-超级电容,8-前轮转角传感器,9-车轮,10-车速传感器,11- 转向执行控制器,12-转向电机,13-转向拉杆,14-转向摇臂,15-循环球转向器,16-整流器, 17-发电机,18-蜗轮蜗杆减速器,19-路感电机,20-转矩传感器,21-转向轴,22-方向盘转角传感器,23-方向盘,24-转矩信号,25-方向盘转角信号,26-质心侧偏角信号,27-横摆角速度信号,28-车速信号,29-前轮转角信号,30-SOC信号,31-信号共享总线。
具体实施方式
为了便于本领域技术人员的理解,下面结合实施例与附图对本实用新型作进一步的说明,实施方式提及的内容并非对本实用新型的限定。
参照图1和图2所示,本实用新型的一种可回收驾驶员转向能量的线控转向系统包括:机械传动模块、控制模块、能量回收模块、电源、路感调节模块和电流调节模块;
所述机械传动模块包括:方向盘23、转向轴21、转向电机12、循环球转向器15、转向摇臂14、转向拉杆13和车轮9;
所述转向轴21的输入端与所述方向盘23相连;
所述循环球转向器15的输入端与所述转向电机12相连,输出端与所述转向摇臂14的输入端相连;
所述转向拉杆13的输入端与所述转向摇臂14的输出端相连,输出端与所述车轮9相连;
所述控制模块包括:方向盘转角传感器22、转矩传感器20、车速传感器10、前轮转角传感器8、质心侧偏角传感器2、横摆角速度传感器1、路感控制器3、转向执行控制器11和滤波模块4;
所述转向执行控制器11的控制输出端与所述转向电机12的控制输入端电气相连,且转向执行控制器11与所述路感控制器3通过信号共享总线31,实现信号共享;
所述方向盘转角传感器22安装在所述方向盘23上,与所述路感控制器3电气相连,用于获取方向盘转角信号25,并将信号传输到路感控制器3;
所述转矩传感器20安装在所述转向轴23上,与所述路感控制器3电气相连,用于获取转矩信号24,并将信号传输到路感控制器3;
所述车速传感器10和前轮转角传感器8安装于所述车轮9上,均与路感控制器3电气相连,分别用于获取车速信号28和前轮转角信号29,并将信号传输到路感控制器3;
所述横摆角速度传感器1安装在车辆扶手箱下部中央位置(也可以为车辆的其他位置),与所述路感控制器3电气相连,用于获取横摆角速度信号27,并将信号传输给路感控制器;
所述质心侧偏角传感器2安装在汽车的质心位置,与所述路感控制器电气相连,用于获取质心侧偏角信号26,并将信号传输给路感控制器3;
所述滤波模块4的输入端与所述路感控制器3的控制输出端电气相连,用于将计算得到的控制信号进行滤波处理;
所述能量回收模块包括:发电机17、整流器16和超级电容7;
所述发电机17的输入端与所述转向轴21的输出端相连,输出端与所述整流器16的输入端电气连接;
所述整流器16的输出端与所述超级电容7电气相连,用于对发电机17产生的电流进行整流;
所述超级电容7的信号输出端与所述路感控制器3相连,用于存储产生的电能,并将其实时的荷电状态(SOC)即当前电量信号30传输到所述路感控制器3;
所述电源6与线控转向系统中的用电机构电气相连,用于给系统供电;
所述路感调节模块包括:路感电机19、蜗轮蜗杆减速器18;
所述蜗轮蜗杆减速器18的输入端与所述路感电机19的输出端相连,输出端与所述转向轴21相连;
所述电流调节模块5的控制输入端与所述滤波模块4电气相连,供电输入端分别与所述电源6的输出端和所述超级电容7的供电输出端电气相连,输出端与所述路感电机19电气相连,用于接收路感控制器的控制信号,调节电流输出和进行供电切换。
其中,所述整流器16中包含整流滤波电路,可将发电机产生的波动较大的交流电整流成比较平稳的直流电,具体电路参照图2所示。
其中,所述超级电容7为双电层超级电容器。
其中,在选取所述发电机17时,要保证在线控系统工作时,发电机17产生的等效在转向轴上的转矩要大于驾驶员输入的转矩。
其中,所述供电切换条件为当超级电容7的SOC大于0.6时切换为使用超级电容7供电,当超级电容7的SOC小于0.2时,使用电源6供电。
其中,所述滤波模块4用于消除路面上的随机干扰力矩对路感模拟控制的影响。
本实用新型中提出的一种可回收驾驶员转向能量的线控转向系统,在工作时,其控制过程分为上下两层。
上层为:驾驶员操纵方向盘23进行转向,驾驶员的输入经转向轴21到发电机17,随着方向盘23的转动发电机17随之转动进行发电,产生的电能经整流器16存储到超级电容7中,并产生反馈力矩,同时路感控制器3根据接收到的方向盘转角信号25、转矩信号24、车速信号28、前轮转角信号29、横摆角速度信号27、质心侧偏角信号26,计算出驾驶员实时的最佳路感力矩,通过路感电机19调节发电机的反馈力矩到最佳路感力矩。其中,实时的最佳路感力矩的计算可参考图3的助力特性曲线,计算出实时的路面反馈力矩后,两者作差即可得到实时的最佳路感力矩。
下层为:在驾驶员转动方向盘23时,转向执行控制器11根据接收到的方向盘转角信号 25,控制转向电机12输出力矩,并经循环球转向器15、转向摇臂14、转向拉杆13将力矩传递到车,9,控制车轮9进行转向。
本实用新型具体应用途径很多,以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以作出若干改进,这些改进也应视为本实用新型的保护范围。
一种可回收驾驶员转向能量的线控转向系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0