










专利摘要
本发明涉及一种轨道建筑空间3D点云数据转换方法,该方法通过车载激光扫描仪镜头转动一圈的时间内车辆二侧轮子的行走距离,求得在这段时间内车辆轮子在轨道上行走轨迹弧线的二个起始点对应的二条等效弯曲半径及其转动夹角,将前一时刻至当前时刻内的扫描点近似地投影至当前时刻的等效半径线上,求得当前等效弯曲半径线上的点与前一时刻等效半径线上相同点的关系,从而完成坐标转换。与现有技术相比,本发明具有算法简单、硬件需求低等优点。
权利要求
1.一种轨道建筑空间3D点云数据转换方法,该方法通过沿轨道运行的工务检测车实现,其特征在于,包括以下步骤:
1)周期性地读取工务检测车同一轮轴两侧的车轮在当前时刻n的位置信息,并与前一时刻n-1的位置信息相比较,由此计算出两侧车轮的位移信息C1和C2;
2)由位移信息C1、C2和轨道的轨距L,分别计算出时刻n车辆位置点轨道的等效弯曲半径与内侧轨道相交点的长度L0和与外侧轨道相交点的长度L+L0,以及该时刻等效弯曲半径与前一时刻n-1等效弯曲半径的夹角θ;
3)将前一时刻n-1至当前时刻n之间的螺旋式行进扫描点近似投影到n时刻的等效弯曲半径线上;
4)对当前时刻n等效半径线上的每一扫描点Pn作垂线,此垂线终止于前一时刻n-1半径线,该终点是对应时刻n等效半径上点Pn的时刻n-1等效半径上的点Pn-1,并计算该垂线距离Cx;
5)根据θ和Cx计算点Pn由其所在的坐标系转换到点Pn-1所在坐标系的偏移值Δux和Δvx,并进行坐标转换;
6)重复步骤3)~步骤5),计算当前时刻n等效半径线上所有的点转换到前一时刻n-1的坐标系中的偏移值,进行坐标转换,获取轨道建筑空间3D点云数据并输出。
2.根据权利要求1所述的一种轨道建筑空间3D点云数据转换方法,其特征在于,步骤1)中信息读取时刻的周期与工务检测车的激光扫描仪镜头的旋转周期同步。
说明书
技术领域
本发明涉及一种数据处理方法,尤其是涉及一种轨道建筑空间3D点云数据转换方法。
背景技术
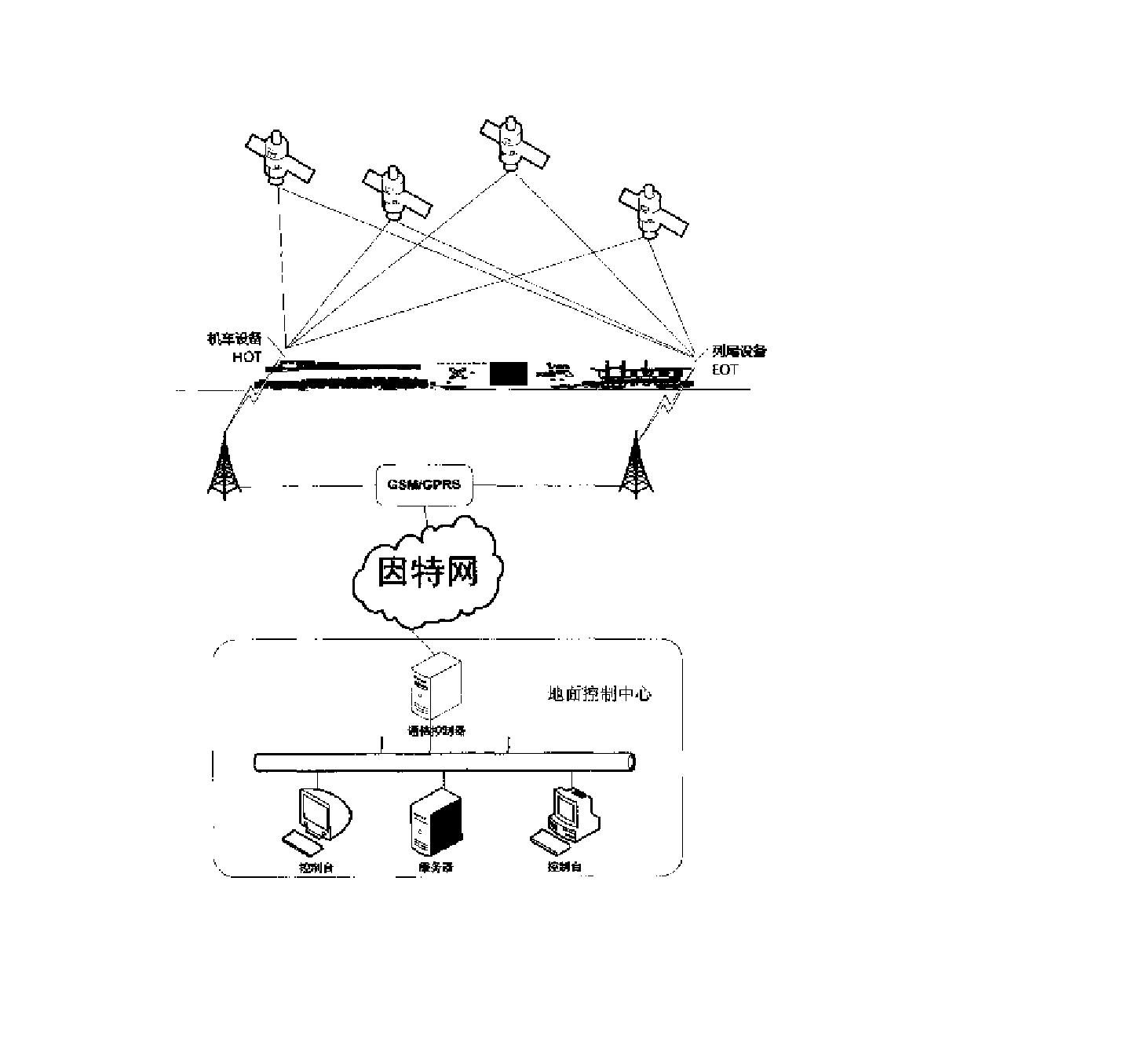
城市轨道交通运营管理的发展,需要对地下隧道的轨道线路沿线建筑空间形状进行记录,作为数字化维护保障管理信息系统的空间数据库。将3D激光扫描仪设置成2D扫描模式并安装在轨道小车上,可快速完成对沿线建筑空间形状数据的采集。由于2D扫描只能采集到独立的建筑截面数据,若要重建隧道3D建筑空间,还需要知道移动2D扫描车辆的行走路径与姿态,生成缺失的坐标信息后,才可将许多2D截面数据按照实际情况拼接起来。按常理,要使行走车辆可记录轨道曲直度行走轨迹,需要引入惯性导航(IMU)结合全球定位系统(GPS)的空间定位方法。由于IMU系统复杂且价格昂贵,在地下隧道又无法引入GPS系统,这种方法并不可行。已申请发明专利《一种城市轨道交通检修小车定位系统》(申请号201110211175.3)提出了利用光电编码器和光电传感器来检测轨道小车的行走距离,但是该专利描述的技术能检测到的行走轨迹是关于直线标量的距离,还不能获得小车在弯曲轨道上行走时的轨迹矢量。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种算法简单、硬件需求低的轨道建筑空间3D点云数据转换方法。
本发明的目的可以通过以下技术方案来实现:
一种轨道建筑空间3D点云数据转换方法,该方法通过沿轨道运行的工务检测车实现,包括以下步骤:
一种轨道建筑空间3D点云数据转换方法,该方法通过沿轨道运行的工务检测车实现,其特征在于,包括以下步骤:
1)周期性地读取工务检测车同一轮轴两侧的车轮在当前时刻n的位置信息,并与前一时刻n-1的位置信息相比较,由此计算出两侧车轮的位移信息C1和C2;
2)由位移信息C1、C2和轨道的轨距L,分别计算出时刻n车辆位置点轨道的等效弯曲半径与内侧轨道相交点的长度L0和与外侧轨道相交点的长度L+L0,以及该时刻等效弯曲半径与前一时刻n-1等效弯曲半径的夹角θ;
3)将前一时刻n-1至当前时刻n之间的螺旋式行进扫描点近似投影到n时刻的等效弯曲半径线上;
4)对当前时刻n等效半径线上的每一扫描点Pn作垂线,此垂线终止于前一时刻n-1半径线,该终点是对应时刻n等效半径上点Pn的时刻n-1等效半径上的点Pn-1,并计算该垂线距离Cx;
5)根据θ和Cx计算点Pn由其所在的坐标系转换到点Pn-1所在坐标系的偏移值Δux和Δvx,并进行坐标转换;
6)重复步骤3)~步骤5),计算当前时刻n等效半径线上所有的点转换到前一时刻n-1的坐标系中的偏移值,进行坐标转换,获取轨道建筑空间3D点云数据并输出。
步骤1)中信息读取时刻的周期与工务检测车的激光扫描仪镜头的旋转周期同步,使得所计算的位移信息C1和C2有足够精度。
与现有技术相比,本发明基于移动式2D激光扫描技术对隧道建筑空间进行数据采集的方法,利用简单的双轮光电编码器获取隧道的纵向曲线信息,通过将螺旋式行进扫描点近似为截面式扫描点,巧妙地解决了将移动式2D扫描数据拓展成3D扫描数据的转换方法,通过对数据线下处理有效完成了对移动扫描点云数据的坐标转换。该发明涉及的算法简单、硬件需求低,并且可广泛应用于其它类似场合。
附图说明
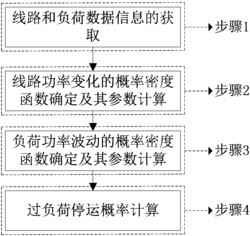
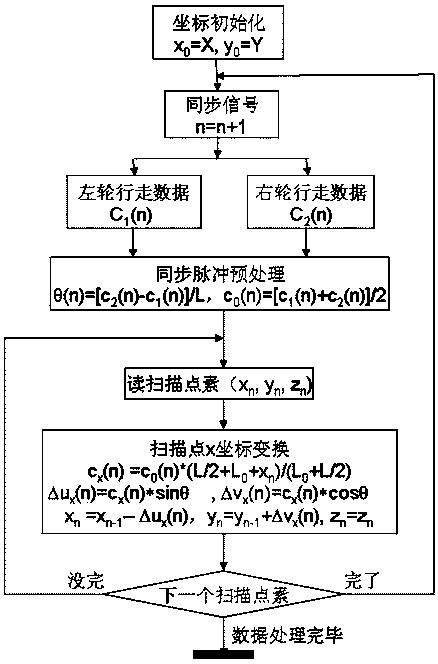
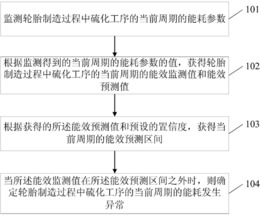
图1为本发明的流程图;
图2为本发明坐标变换的原理图,其中图2(a)为实际的扫描轨迹,图2(b)为激光扫描仪扫描得到的扫描轨迹;
图3为2D点云数据近似表示的示意图。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。
实施例
本发明的原理是将激光扫描仪输出的2D点云数据转换为3D点云数据,2D移动扫描实际上在Y方向上是螺旋形行走的空间轨迹,但是由于系统仅能在每个扫描镜头周期输出同步信号时读取2D扫描数据,这些数据可近似为相互独立的建筑形状截面{X,Z}的数据。偌要把这些截面拼接起来形成{X,Y,Z}空间,还需要补充缺失的Y轴信息。由于代表前进方向的Y轴可以是弯曲的,将每一个截面{X,Z}的扫描数据在水平面上的投影线看作是一特定X-Y坐标系中的X轴线,那么3D数字空间的建立就是将这些在不同X-Y坐标系里的{X,Z}数据转换到一个统一的的X-Y坐标系内。由于不同截面在Z方向的高度一致,因此不需要做调整。该方法通过沿轨道运行的工务检测车实现,具体包括如图1所示的几个步骤:
1)首先对系统进行初始化,并对激光扫描仪的信号进行同步,周期性地读取工务检测车同一轮轴两侧的车轮在当前时刻n的位置信息,通过与前一时刻n-1的位置信息相比,计算出两侧车轮的位移信息C1和C2。其中信息读取时刻的周期与工务检测车的激光扫描仪镜头的旋转周期同步,使得所计算的位移信息C1和C2有足够精度。
2)由位移信息C1、C2和轨道的轨距L,分别计算出时刻n车辆位置点轨道的等效弯曲半径与内侧轨道相交点的长度L0和与外侧轨道相交点的长度L+L0,以及该时刻等效弯曲半径与前一时刻n-1等效弯曲半径的夹角θ;
3)将前一时刻n-1至当前时刻n之间的螺旋式行进扫描点近似投影到n时刻的等效弯曲半径线上;
4)对当前时刻n等效半径线上的每一扫描点Pn作垂线,此垂线终止于前一时刻n-1半径线,该终点是对应时刻n等效半径上点Pn的时刻n-1等效半径上的点Pn-1,并计算该垂线距离Cx;
5)根据θ和Cx计算点Pn由其所在的坐标系转换到点Pn-1所在坐标系的偏移值Δux和Δvx,并进行坐标转换;
6)重复步骤3)~步骤5),计算当前时刻n等效半径线上所有的点转换到前一时刻n-1的坐标系中的偏移值,进行坐标转换,获取轨道建筑空间3D点云数据并输出。
具体原理如图2和图3所示,其中图2是将实际上螺旋形空间扫描点近似为多截面合成空间点的原理,在图3中{Xn-1,Yn-1}是n-1时刻的坐标系,{X′n,Y′n}是n时刻如果是直线前进时的坐标系,{Xn,Yn}是n时刻如果是弯曲前进时的坐标系,Pn(xn,yn)为当前时刻n在等效半径线上的任意点,Pn-1(xn-1,yn-1)为前一时刻n-1半径线与点Pn(xn,yn)对应的点,垂线Cx起于Pn(xn,yn)垂足为Pn-1(xn-1,yn-1)。θ为弯曲度,L为轨距,L0为轨距内侧距圆心的距离,C1、C2、C0为内侧、外侧和轨道中点的移动距离。计算时,L已知,C1、C2可测,则可得:
C2=(L+L0)×θ,C1=L0×θ
L0=(C1×L)/(C2-C1),θ=(C2-C1)/L
C0=(C2+C1)/2
对于等效半径线上任意点x:
Cx=C0×(L/2+L0+x)/(L0+L/2)
对于前一时刻坐标系对应点的偏移量:
Δux=Cx×sinθ,Δvx=Cx×cosθ
其坐标变换关系为:
xn=xn-1-Δux(n)
yn=yn-1+Δvx(n)
zn=zn。
一种轨道建筑空间3D点云数据转换方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0