









专利摘要
本实用新型公开了一种传送行走装置,属于机械制造技术领域。该传送行走装置包括底盘、支架、链条机构、柔性支撑板和动力机构,链条机构包括第一链条机构、第二链条机构、第三链条机构和第四链条机构,通过将每个柔性支撑板的第一侧边的两端分别连接在第一链条和第二链条上,柔性支撑板的第二侧边的两端分别连接在第三链条和第四链条上,使得在通过动力机构驱动链条机转动时,柔性支撑板会一起移动,在柔性支撑板上放置物品,柔性支撑板运动到竖直状态之前,可以人工取走物品,通过在底盘上设置滚轮、滚轮电机和循迹传感器,可以通过滚轮电机驱动滚轮转动,使传送行走装置沿着循迹线行走,实现物品的自动运送,避免了采用人工导致的效率低的问题。
权利要求
1.一种传送行走装置,其特征在于,所述传送行走装置包括:
底盘(60)、设置在所述底盘(60)上的支架(10)、设置在所述支架(10)上的链条机构、柔性支撑板(20)和用于驱动所述链条机构转动的动力机构(30);
所述链条机构包括设置在第一竖直平面内的第一链条机构、设置在第二竖直平面内的第二链条机构、设置在第三竖直平面内的第三链条机构和设置在第四竖直平面内的第四链条机构,且所述第一竖直平面、所述第二竖直平面、所述第三竖直平面和所述第四竖直平面相互平行;
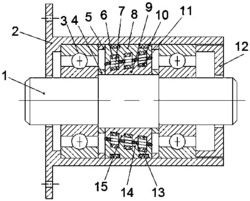
所述第一链条机构包括第一链轮(501)、第二链轮(502)、第三链轮(503)、第四链轮(504)和第一链条(41),所述第一链条(41)绕设在所述第一链条机构中的四个链轮上,所述第二链条机构包括第五链轮(505)、第六链轮(506)、第七链轮(507)、第八链轮(508)和第二链条(42),所述第二链条(42)绕设在所述第二链条机构中的四个链轮上,所述第三链条机构包括第九链轮(509)、第十链轮(510)和第三链条(43),所述第三链条(43)绕设在所述第三链条机构中的两个链轮上,所述第四链条机构包括第十一链轮(511)、第十二链轮(512)和第四链条(44),所述第四链条(44)绕设在所述第四链条机构中的两个链轮上,所述第一链轮(501)、所述第三链轮(503)设置在第一竖直高度位置,所述第二链轮(502)、所述第四链轮(504)设置在第二竖直高度位置,且所述第一链轮(501)和所述第三链轮(503)之间的间距与所述第二链轮(502)和所述第四链轮(504)之间的间距相等,所述第一链轮(501)、所述第五链轮(505)、所述第九链轮(509)和所述第十一链轮(511)的转动轴线重合,所述第二链轮(502)、所述第六链轮(506)、所述第十链轮(510)和所述第十二链轮(512)的转动轴线重合,所述第三链轮(503)和所述第七链轮(507)的转动轴线重合,所述第四链轮(504)和所述第八链轮(508)的转动轴线重合,所述第一链条(41)、所述第二链条(42)、所述第三链条(43)和所述第四链条(44)的转动方向和线速度相同;
每个所述柔性支撑板(20)均具有垂直于所述第一竖直平面的第一侧边和第二侧边,所述第一侧边的两端分别以可绕所述第一侧边转动的方式连接在所述第一链条(41)和所述第二链条(42)上,所述第二侧边的两端分别以可绕所述第二侧边转动的方式连接在所述第三链条(43)和第四链条(44)上,所述柔性支撑板(20)具有水平状态和竖直状态,当所述柔性支撑板(20)处于水平状态时,所述第一侧边位于所述第三链轮(503)和第四链轮(504)的轴线所在平面的远离所述第一链轮(501)的一侧,所述第二侧边位于所述第一链轮(501)和所述第二链轮(502)的轴线所在平面的靠近所述第三链轮(503)的一侧,且所述柔性支撑板(20)处于水平状态,当所述柔性支撑板(20)处于竖直状态时,所述第一侧边和所述第二侧边均位于所述第一链轮(501)和所述第二链轮(502)的轴线所在平面的远离所述第三链轮(503)的一侧,且所述柔性支撑板(20)处于竖直状态;
所述底盘(60)上设置有滚轮、用于检测预设的循迹线的循迹传感器(64)和用于带动所述滚轮转动的滚轮电机(63),所述传送行走装置还包括用于根据所述循迹传感器(64)的检测信号,控制所述传送行走装置沿所述循迹线行走的控制器。
2.根据权利要求1所述的传送行走装置,其特征在于,所述传送行走装置包括两个所述滚轮电机(63),所述滚轮包括万向轮(61)、第一滚轮(62a)和第二滚轮(62b),所述第一滚轮(62a)和所述第二滚轮(62b)与两个所述滚轮电机(63)一一对应设置。
3.根据权利要求1所述的传送行走装置,其特征在于,所述底盘(60)上还设置有避障传感器(64),所述避障传感器(64)与所述控制器电连接。
4.根据权利要求1所述的传送行走装置,其特征在于,所述支架(10)上位于所述第一链条(41)的上方的位置设置有用于检测所述柔性支撑板(20)上是否放有物品的红外光栅。
5.根据权利要求1~4任一项所述的传送行走装置,其特征在于,所述动力机构(30)包括驱动轴(33),所述第一链轮(501)、所述第五链轮(505)、所述第九链轮(509)和所述第十一链轮(511)设置在所述驱动轴(33)上,所述第一链轮(501)、所述第五链轮(505)、所述第九链轮(509)和所述第十一链轮(511)的直径均相同。
6.根据权利要求1~4任一项所述的传送行走装置,其特征在于,所述第一链条(41)、所述第二链条(42)、所述第三链条(43)和所述第四链条(44)上均设置有用于连接所述柔性支撑板(20)的安装结构,所述安装结构包括安装板(22),所述安装板(22)上设置有安装孔(22a),所述柔性支撑板(20)的第一侧边和第二侧边的两端均设置有销轴(21),所述销轴(21)可转动地插设在所述安装孔(22a)中。
7.根据权利要求6所述的传送行走装置,其特征在于,所述第一链条(41)、所述第二链条(42)、所述第三链条(43)和所述第四链条(44)上分别等间距设置有多个所述安装结构。
8.根据权利要求1~4任一项所述的传送行走装置,其特征在于,所述柔性支撑板(20)包括柔性连接件(20b)和平行间隔设置的多块条形板(20a),所述多块条形板(20a)通过所述柔性连接件(20b)连接。
9.根据权利要求8所述的传送行走装置,其特征在于,所述柔性连接件(20b)为链条。
10.根据权利要求1~4任一项所述的传送行走装置,其特征在于,所述传送行走装置还包括外壳(80),所述外壳(80)设置在所述支架(10)上,所述链条机构和所述多个柔性支撑板(20)位于所述外壳(80)中。
说明书
技术领域
本实用新型涉及机械制造技术领域,特别涉及一种传送行走装置。
背景技术
在餐饮、物流、制造等行业,都有大量的物品需要运送,目前主要是采用人工的方式进行。例如在餐饮行业中,需要大量的服务员往返于厨房和餐桌,以进行饭菜的运送,在物流和制造业中,则有大量的货物或零件需要运送。通过人工往返运送的方式效率低,不利于自动化生产,还增加了人力成本。
实用新型内容
为了解决人工往返运送物品效率低的问题,本实用新型实施例提供了一种传送行走装置。所述技术方案如下:
一种传送行走装置,所述传送行走装置包括:
底盘、设置在所述底盘上的支架、设置在所述支架上的链条机构、柔性支撑板和用于驱动所述链条机构转动的动力机构;
所述链条机构包括设置在第一竖直平面内的第一链条机构、设置在第二竖直平面内的第二链条机构、设置在第三竖直平面内的第三链条机构和设置在第四竖直平面内的第四链条机构,且所述第一竖直平面、所述第二竖直平面、所述第三竖直平面和所述第四竖直平面相互平行;所述第一链条机构包括第一链轮、第二链轮、第三链轮、第四链轮和第一链条,所述第一链条绕设在所述第一链条机构中的四个链轮上,所述第二链条机构包括第五链轮、第六链轮、第七链轮、第八链轮和第二链条,所述第二链条绕设在所述第二链条机构中的四个链轮上,所述第三链条机构包括第九链轮、第十链轮和第三链条,所述第三链条绕设在所述第三链条机构中的两个链轮上,所述第四链条机构包括第十一链轮、第十二链轮和第四链条,所述第四链条绕设在所述第四链条机构中的两个链轮上,所述第一链轮、所述第三链轮设置在第一竖直高度位置,所述第二链轮、所述第四链轮设置在第二竖直高度位置,且所述第一链轮和所述第三链轮之间的间距与所述第二链轮和所述第四链轮之间的间距相等,所述第一链轮、所述第五链轮、所述第九链轮和所述第十一链轮的转动轴线重合,所述第二链轮、所述第六链轮、所述第十链轮和所述第十二链轮的转动轴线重合,所述第三链轮和所述第七链轮的转动轴线重合,所述第四链轮和所述第八链轮的转动轴线重合,所述第一链条、所述第二链条、所述第三链条和所述第四链条的转动方向和线速度相同,每个所述柔性支撑板均具有垂直于所述第一竖直平面的第一侧边和第二侧边,所述柔性支撑板的第一侧边的两端分别以可绕所述第一侧边转动的方式连接在所述第一链条和所述第二链条上,所述柔性支撑板的第二侧边的两端分别以可绕所述第二侧边转动的方式连接在所述第三链条和第四链条上,所述柔性支撑板具有水平状态和竖直状态,当所述柔性支撑板处于水平状态时,所述第一侧边位于所述第三链轮和第四链轮的轴线所在平面的远离所述第一链轮的一侧,所述第二侧边位于所述第一链轮和所述第二链轮的轴线所在平面的靠近所述第三链轮的一侧,当所述柔性支撑板处于竖直状态时,所述第一侧边和所述第二侧边均位于所述第一链轮和所述第二链轮的轴线所在平面的远离所述第三链轮的一侧;
所述底盘上设置有滚轮、用于检测预设的循迹线的循迹传感器和用于带动所述滚轮转动的滚轮电机,所述传送行走装置还包括用于根据所述循迹传感器的检测信号,控制所述传送行走装置沿所述循迹线行走的控制器。
优选地,所述传送行走装置包括两个所述滚轮电机,所述滚轮包括万向轮、第一滚轮和第二滚轮,所述第一滚轮和所述第二滚轮与两个所述滚轮电机一一对应设置。
优选地,所述底盘上还设置有避障传感器,所述避障传感器与所述控制器电连接。
优选地,所述支架上位于所述第一链条的上方的位置设置有用于检测所述柔性支撑板上是否放有物品的红外光栅。
优选地,所述动力机构包括驱动轴,所述第一链轮、所述第五链轮、所述第九链轮和所述第十一链轮设置在所述驱动轴上,所述第一链轮、所述第五链轮、所述第九链轮和所述第十一链轮的直径均相同。
优选地,所述第一链条、所述第二链条、所述第三链条和所述第四链条上均设置有用于连接所述柔性支撑板的安装结构,所述安装结构包括安装板,所述安装板上设置有安装孔,所述柔性支撑板的第一侧边和第二侧边的两端均设置有销轴,所述销轴可转动地插设在所述安装孔中。
优选地,所述第一链条、所述第二链条、所述第三链条和所述第四链条上分别等间距设置有多个所述安装结构。
可选地,所述柔性支撑板包括柔性连接件和平行间隔设置的多块条形板,所述多块条形板通过所述柔性连接件连接。
可选地,所述柔性连接件为链条。
可选地,所述传送行走装置还包括外壳,所述外壳设置在所述支架上,所述链条机构和所述多个柔性支撑板位于所述外壳中。
本实用新型实施例提供的技术方案带来的有益效果是:通过在支架上设置链条机构,其中链条机构包括分别设置在相互平行的四个平面内的四个链条机构,由于第一链条机构包括第一链轮、第二链轮、第三链轮、第四链轮和第一链条,且第一链轮、第三链轮设置在第一竖直高度位置,第二链轮、第四链轮设置在第二竖直高度位置,第一链轮和第三链轮之间的间距与第二链轮和第四链轮之间的间距相等,使得第一链条围成较大的四边形,从而使得第三链条和第四链条分别围成较小的四边形,通过第一链轮、第五链轮、第九链轮和第十一链轮的转动轴线重合,第二链轮、第六链轮、第十链轮和第十二链轮的转动轴线重合,第三链轮和第七链轮的转动轴线重合,第四链轮和第八链轮的转动轴线重合,可以使得第二链条围成与第一链条相同的较大的四边形,第四链条围成与第三链条相同的较小的四边形,通过将柔性支撑板的第一侧边的两端分别连接在第一链条和第二链条上,柔性支撑板的第二侧边的两端分别连接在第三链条和第四链条上,使得在链条机构转动时,柔性支撑板会一同移动,由于当柔性支撑板位于第一位置时,第一侧边位于第三链轮和第四链轮的轴线所在平面的远离第一链轮的一侧,第二侧边位于第一链轮和第二链轮的轴线所在平面的靠近第三链轮的一侧,且柔性支撑板处于水平状态,当柔性支撑板位于第二位置时,第一侧边和第二侧边均位于第一链轮和第二链轮的轴线所在平面的远离第三链轮的一侧,且柔性支撑板处于竖直状态,从而可以在柔性支撑板处于水平状态时,在柔性支撑板上放置待运送的物品,在柔性支撑板运动到竖直状态之前,可以人工取走该柔性支撑板上的物品,在所有柔性支撑板上的物品都被取走后则可以控制链条机构翻转,使得柔性支撑板回到水平状态。通过在底盘上设置滚轮、滚轮电机和循迹传感器,从而可以在控制器的控制下,通过滚轮电机驱动滚轮转动,使传送行走装置沿着预先设定的循迹线行走,实现物品的自动运送,避免了采用人工导致的效率低的问题,同时节省了大量的人力。
附图说明
为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本实用新型实施例提供的一种传送行走装置的结构示意图;
图2是本实用新型实施例提供的一种链条机构的结构示意图;
图3是本实用新型实施例提供的一种传送行走装置的底部结构示意图;
图4是本实用新型实施例提供的一种传送行走装置的局部放大示意图;
图5是本实用新型实施例提供的另一种传送装置的局部放大示意图;
图6是本实用新型实施例提供的一种柔性支撑板的结构示意图;
图7是本实用新型实施例提供的另一种传送行走装置的结构示意图。
具体实施方式
为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型实施方式作进一步地详细描述。
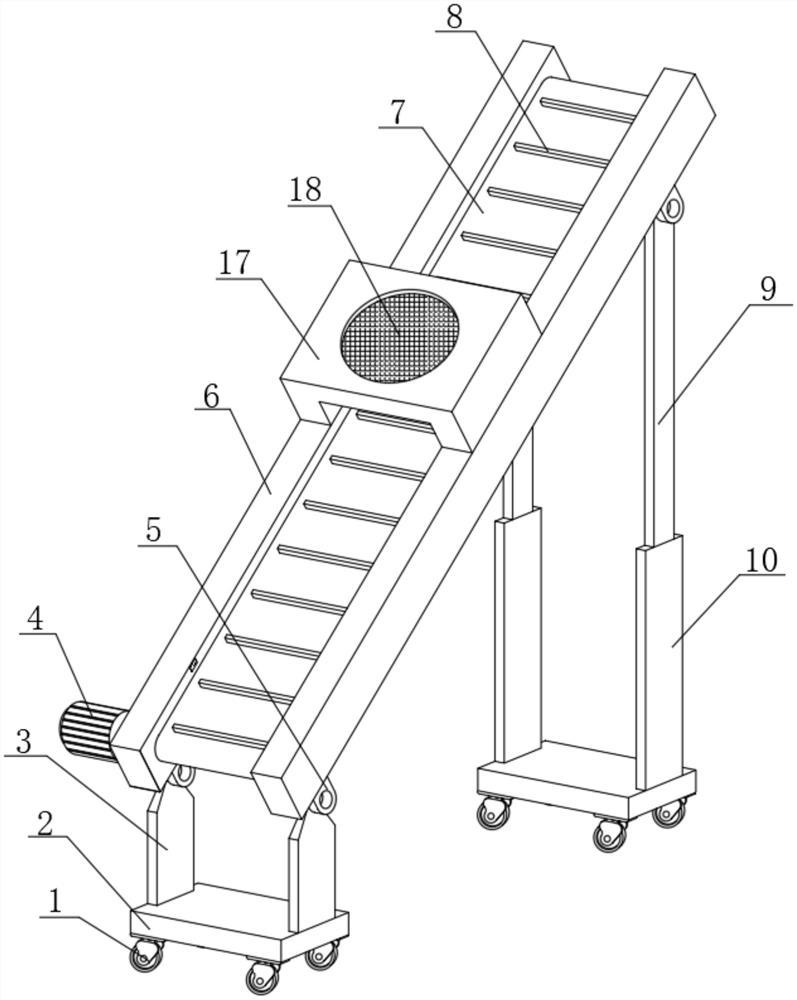
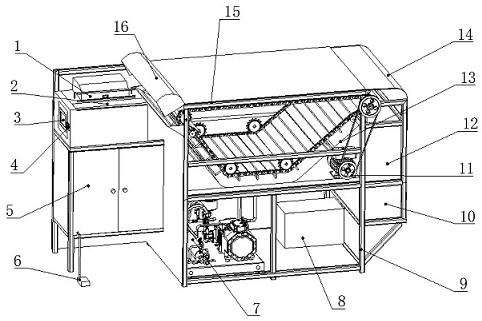
图1是本实用新型实施例提供的一种传送行走装置的结构示意图,如图1所示,该传送行走装置包括底盘60、设置在底盘60上的支架10、设置在支架10上的链条机构、三个柔性支撑板20和用于驱动链条机构同向且同线速度转动的动力机构30。
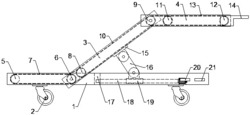
图2是本实用新型实施例提供的一种链条机构的结构示意图,如图2所示,链条机构包括设置在第一竖直平面内的第一链条机构、设置在第二竖直平面内的第二链条机构、设置在第三竖直平面内的第三链条机构和设置在第四竖直平面内的第四链条机构,且第一竖直平面、第二竖直平面、第三竖直平面和第四竖直平面相互平行。
第一链条机构包括第一链轮501、第二链轮502、第三链轮503、第四链轮504和第一链条41;第二链条机构包括第五链轮505、第六链轮506、第七链轮507、第八链轮508和第二链条42;第三链条机构包括第九链轮509、第十链轮510和第三链条43;第四链条机构包括第十一链轮511、第十二链轮512和第四链条44。第一链条41绕设在第一链条机构中的四个链轮上,第二链条42绕设在第二链条机构中的四个链轮上,第三链条43绕设在第三链条机构中的两个链轮上,第四链条44绕设在第四链条机构中的两个链轮上。
第一链轮501、第三链轮503设置在第一竖直高度位置,第二链轮502、第四链轮504设置在第二竖直高度位置,且第一链轮501和第三链轮503之间的间距与第二链轮502和第四链轮504之间的间距相等。
第一链轮501、第五链轮505、第九链轮509和第十一链轮511的转动轴线重合,第二链轮502、第六链轮506、第十链轮510和第十二链轮512的转动轴线重合,第三链轮503和第七链轮507的转动轴线重合,第四链轮504和第八链轮508的转动轴线重合。
参见图1,每个柔性支撑板20均具有垂直于第一竖直平面的第一侧边201和第二侧边202,第一侧边201的两端分别固定连接在第一链条41和第二链条42上,第二侧边202的两端分别固定连接在第三链条43和第四链条44上,柔性支撑板20具有水平状态和竖直状态,当柔性支撑板20处于水平状态时,第一侧边位于第三链轮503和第四链轮504的轴线所在平面的远离第一链轮501的一侧,第二侧边位于第一链轮501和第二链轮502的轴线所在平面的靠近第三链轮503的一侧,且柔性支撑板20处于水平状态,当柔性支撑板20处于竖直状态时,第一侧边和第二侧边均位于第一链轮501和第二链轮502的轴线所在平面的远离第三链轮503的一侧,且柔性支撑板20处于竖直状态。
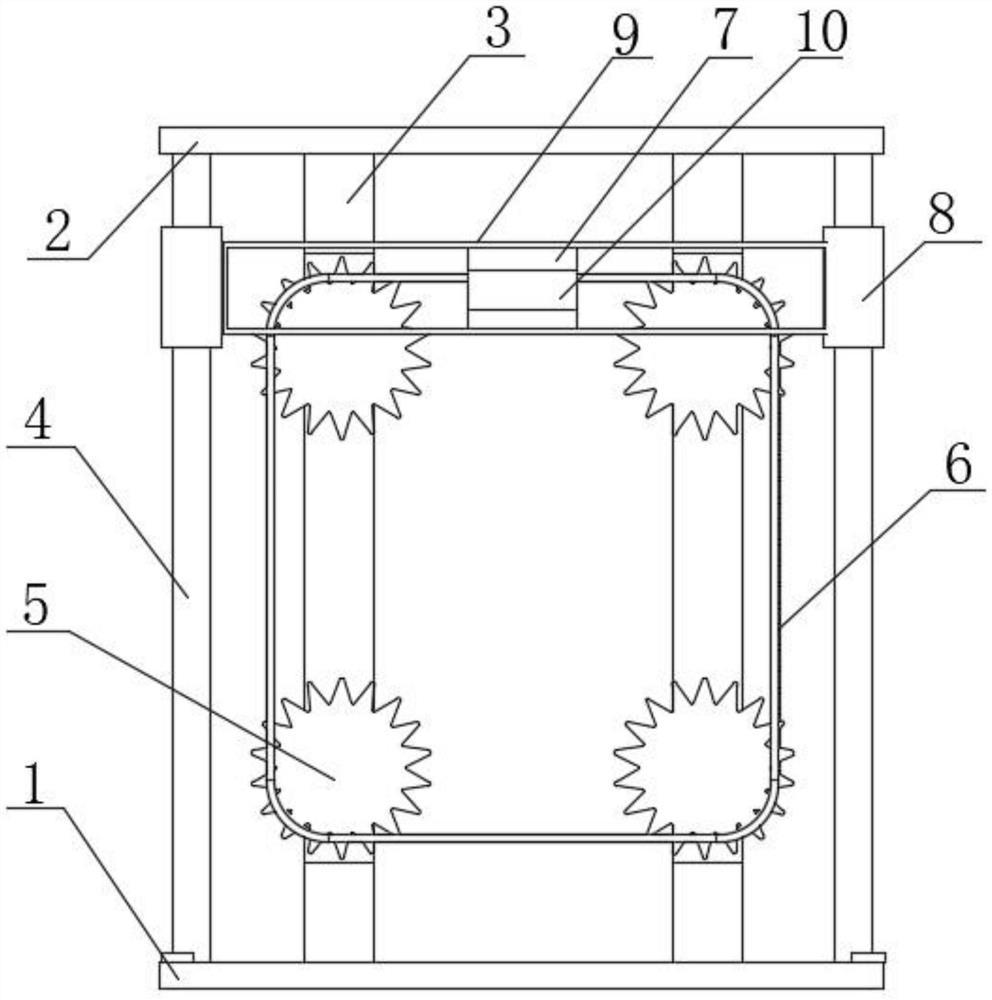
图3是本实用新型实施例提供的一种传送行走装置的底部结构示意图,如图3所示,底盘60上设置有滚轮、用于检测预设的循迹线的循迹传感器64和用于带动滚轮转动的滚轮电机63,传送行走装置还包括用于根据循迹传感器64的检测信号,控制传送行走装置沿循迹线行走的控制器。
在其他实施例中,还可以设置其他数量的柔性支撑板20,以满足不同的需要。
本实用新型实施例通过在支架上设置链条机构,其中链条机构包括分别设置在相互平行的四个平面内的四个链条机构,由于第一链条机构包括第一链轮、第二链轮、第三链轮、第四链轮和第一链条,且第一链轮、第三链轮设置在第一竖直高度位置,第二链轮、第四链轮设置在第二竖直高度位置,第一链轮和第三链轮之间的间距与第二链轮和第四链轮之间的间距相等,使得第一链条围成较大的四边形,从而使得第三链条和第四链条分别围成较小的四边形,通过第一链轮、第五链轮、第九链轮和第十一链轮的转动轴线重合,第二链轮、第六链轮、第十链轮和第十二链轮的转动轴线重合,第三链轮和第七链轮的转动轴线重合,第四链轮和第八链轮的转动轴线重合,可以使得第二链条围成与第一链条相同的较大的四边形,第四链条围成与第三链条相同的较小的四边形,通过将柔性支撑板的第一侧边的两端分别连接在第一链条和第二链条上,柔性支撑板的第二侧边的两端分别连接在第三链条和第四链条上,使得在链条机构转动时,柔性支撑板会一同移动,由于当柔性支撑板位于第一位置时,第一侧边位于第三链轮和第四链轮的轴线所在平面的远离第一链轮的一侧,第二侧边位于第一链轮和第二链轮的轴线所在平面的靠近第三链轮的一侧,且柔性支撑板处于水平状态,当柔性支撑板位于第二位置时,第一侧边和第二侧边均位于第一链轮和第二链轮的轴线所在平面的远离第三链轮的一侧,且柔性支撑板处于竖直状态,从而可以在柔性支撑板处于水平状态时,在柔性支撑板上放置待运送的物品,在柔性支撑板运动到竖直状态之前,可以人工取走该柔性支撑板上的物品,在所有柔性支撑板上的物品都被取走后则可以控制链条机构翻转,使得柔性支撑板回到水平状态。通过在底盘上设置滚轮、滚轮电机和循迹传感器,从而可以在控制器的控制下,通过滚轮电机驱动滚轮转动,使传送行走装置沿着预先设定的循迹线行走,实现物品的自动运送,避免了采用人工导致的效率低的问题,同时节省了大量的人力。
需要说明的是,循迹线可以在控制传送行走装置工作之前预先设置设置在地面上。
参照图3,该传送行走装置包括两个滚轮电机63,滚轮包括万向轮61、第一滚轮62a和第二滚轮62b,第一滚轮62a和第二滚轮62b与两个滚轮电机63一一对应设置。通过一个滚轮电机63驱动第一滚轮62a转动,另一个滚轮电机63驱动第二滚轮62b转动,当第一滚轮62a和第二滚轮62b的转速不同时,就可以实现传送行走装置的转向,从而可以使传送行走装置始终沿着循迹线行走。
可选地,循迹传感器64可以是红外循迹传感器。
如图1所示,底盘60上还设置有避障传感器64,避障传感器64与控制器电连接。当避障传感器64检测到前方有障碍物时,可以向控制器发出信号,由控制器控制第一滚轮62a和第二滚轮62b停止转动,从而使传送行走装置停止。
可选地,避障传感器64可以是红外避障传感器。
实现时,传送行走装置还可以包括输入设备和图像获取设备,输入设备用于输入目标位置信息,图像获取设备用于获取目标位置信息,输入设备和图像获取设备分别与控制器电连接。目标位置信息可以是需要送达的位置处的图像信息,例如在使用传送行走装置进行送餐时,目标位置信息可以是目标餐桌的编号,可以输入目标餐桌的编号,目标餐桌处可以放置记录有编号的号牌,传送行走装置在沿着循迹线行进过程中,图像获取设备获取到了目标餐桌的号牌上的编号时,则控制器控制传送行走装置停止。
可选地,图像获取设备可以是摄像头,通过拍摄到的图像识别出目标餐桌的号牌。
如图1所示,支架10上位于第一链条41的上方的位置设置有用于检测柔性支撑板20上是否放有物品的红外光栅。红外光栅可以与控制器电连接。红外光栅包括发射器71和接收器72,柔性支撑板20位于发射器71和接收器72之间,当柔性支撑板20随着链条机构移动到最高位置时,若柔性支撑板20上放置有物品,则物品会挡住发射器71射向接收器72的红外信号,当控制器检测到接收器72没有接收到红外信号时,控制链条机构停止转动,以便于人员取走柔性支撑板20上的物品。
具体地,控制器可以是单片机,可选型号为STC89C52RC的单片机。
进一步地,传送行走装置还包括用于检测柔性支撑板20的位置的接近开关73,接近开关73设置在支架10上,且位于第一链条41的上方,红外光栅的下方。使得可以在柔性支撑板20随着链条机构移动到最高位置时,停止移动,若此时柔性支撑板20上没有物品则可以便于人员将物品放置到柔性支撑板20上。
实现时,接近开关73可以与控制器电连接,柔性支撑板20上可以设置用于接近开关73检测的检测物,例如图1中的金属棒74。
如图1所示,动力机构30包括驱动轴33,第一链轮501、第五链轮505、第九链轮509和第十一链轮511设置在驱动轴33上,第一链轮501、第五链轮505、第九链轮509和第十一链轮511的直径均相同。将第一链轮501、第五链轮505、第九链轮509和第十一链轮511设置在同一驱动轴33上,且将第一链轮501、第五链轮505、第九链轮509和第十一链轮511的直径设置的相同可以便于控制第一链条41、第二链条42、第三链条43和第四链条44的转向和线速度,以使得它们的转向和线速度相同,确保柔性支撑板20在上升的过程中保持水平。
实现地,驱动轴33可以通过轴承331支撑在支架10上。
优选地,第一链轮501和第九链轮509可以为一个整体,即第一链轮501和第九链轮509为一个双链轮,这样可以使结构更加简单,便于拆装。
相应地,第二链轮502和第十链轮510可以为一个双链轮,第五链轮505和第十一链轮511可以为一个双链轮,第六链轮506和第十二链轮512可以为一个双链轮。
具体地,驱动轴33可以是阶梯轴,第一链轮501、第九链轮509、第五链轮505和第十一链轮511可以通过轴肩进行轴向定位,第一链轮501、第九链轮509、第五链轮505和第十一链轮511可以通过键与驱动轴33连接,实现周向定位。
第二链轮502、第三链轮503、第四链轮504、第六链轮506、第七链轮507和第八链轮508、第十链轮510和第十二链轮512可以分别通过支撑轴可转动地设置在支架10上。
再次参见图1,动力机构30可以包括电动机31和减速器32,电动机31的输出轴与减速器32的输入轴同轴连接,减速器32的输出轴与驱动轴33同轴连接,以便于控制驱动轴33的转速,从而改变柔性支撑板20上升的速度。
图4是本实用新型实施例提供的一种传送行走装置的局部放大示意图,如图4所示,第一链条41、第二链条42、第三链条43和第四链条44上均设置有用于连接柔性支撑板20的安装结构,安装结构包括安装板22,安装板22上设置有安装孔22a,柔性支撑板20的第一侧边和第二侧边的两端均设置有销轴21,销轴21可转动地插设在安装孔22a中。由于在柔性支撑板20上升到链条机构的上端时,链条开始弯曲,此时销轴21可以与安装孔22a发生相对转动,避免柔性支撑板20发生扭曲。
具体地,柔性支撑板20的第一侧边的两个销轴21分别插设在第一链条41和第二链条42上的安装板22中,柔性支撑板20的第二侧边的两个销轴21分别插设在第三链条43和第四链条44上的安装板22中。
优选地,第一链条41、第二链条42、第三链条43和第四链条44上可以均等间距设置有多个安装结构。这样可以便于柔性支撑板20的拆卸和安装,方便设置合适数量的柔性支撑板20以满足不同的需要。
为了便于柔性支撑板20的弯曲,第一链条41、第二链条42、第三链条43和第四链条44可以选用节距较小的链条,优选地,可以选择节距为3/16英寸的链条。
优选地,第一链条41最高点和最低点之间的高度差不小于柔性支撑板20的第一侧边和第二侧边之间的距离的两倍,使得在链条机构转动的过程中,至少有两个柔性支撑板20随着链条转动到竖直状态。
进一步地,支架10上还设置有用于控制链条机构停止运动的第一限位开关75和第二限位开关76,第一限位开关75和第二限位开关76分别与控制器电连接。当三个柔性支撑板20上都放置有物品时,此时三个柔性支撑板20在竖直方向上平行间隔分布,当处于最低位置处的柔性支撑板20触碰到第一限位开关75时,控制器控制链条机构停止转动。当三个柔性支撑板20上的物品都被取走时,有两个柔性支撑板20随着链条机构转动至竖直状态,处于竖直状态的两个柔性支撑板20中,位置较低的一个触碰到第二限位开关76时,控制器控制链条机构停止转动。
图5是本实用新型实施例提供的另一种传送装置的局部放大示意图,如图5所示,安装板22安装在第一链条41、第二链条42、第三链条43和第四链条44的侧边上,具体地,可以在第一链条41、第二链条42、第三链条43和第四链条44中的每一个链节上设置一块安装板22。
实现时,安装板22可以与链节为一体结构。
图6是本实用新型实施例提供的一种柔性支撑板的结构示意图,如图6所示,柔性支撑板20包括柔性连接件20b和平行间隔设置的多块条形板20a,多块条形板20a通过柔性连接件20b连接。柔性连接件20b可以方便柔性支撑板20随着链条的转动发生弯曲,同时多块条形板20a可以对放置在上面的物品提供一定的支撑。
容易想到的是,多块条形板20a在平行于第一链条41所在的平面的方向上间隔设置,且多块条形板20a垂直于第一链条41所在的平面,以使得柔性支撑板20能够发生弯折。
优选地,传送行走装置还可以包括支撑盘,在运送物品时,支撑盘放置于柔性支撑板20上,通过支撑盘增大物品与柔性支撑板20的接触面积,以使物品在柔性支撑板20上更加平稳,在物品被从柔性支撑板20上取走时,支撑盘也被一同取走。
优选地,柔性连接件20b可以为链条。由于链条只能在一个平面内弯曲,通过采用链条作为柔性连接件20b可以提高柔性支撑板20的稳定性,避免柔性支撑板20在垂直于第一链条41所在的平面的方向上发生变形。
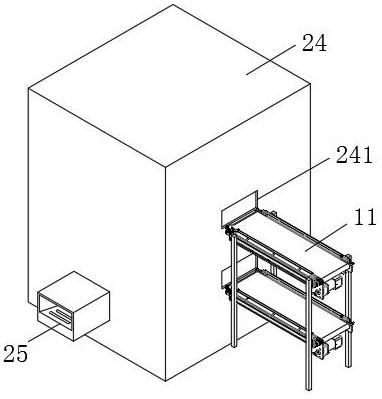
图7是本实用新型实施例提供的另一种传送行走装置的结构示意图,在如图7所示的传送行走装置中,传送行走装置还可以包括外壳80,外壳80设置在支架10上,链条机构和多个柔性支撑板20位于外壳80中,通过外壳80可以对链条机构和柔性支撑板20以及放置在柔性支撑板20上的物品提供保护。
以用于餐厅进行传菜为例,简单说明本实用新型实施例提供的传送行走装置的工作过程:
传送行走装置返回到厨房,当红外光栅检测到水平状态的柔性支撑板上放置有碗碟时,控制器控制链条机构停止,待碗碟被取走后,红外光栅检测到水平状态的柔性支撑板上没有碗碟,控制器控制链条机构转动,直至两个柔性支撑板处于竖直状态,一个处于水平状态,实现传送行走装置的复位。若传送行走装置返回厨房时,已经有两个柔性支撑板处于竖直状态,一个处于水平状态,且水平状态的柔性支撑板上没有碗碟,则无需进行复位。
在完成复位后,操作人员在一块柔性支撑板上放置上碗碟,红外光栅检测到水平状态的柔性支撑板上有碗碟后,控制器控制链条机构转动,使得放置有碗碟的柔性支撑板下降,至另一块柔性支撑板移动到水平状态,操作人员再在该柔性支撑板上放置碗碟,直至三个柔性支撑板都移动到水平状态且都放置有碗碟,从而完成饭菜的放置。
在完成饭菜放置后,传送行走装置沿着循迹线行走至目标餐桌,并停止,控制器控制链条机构转动,使得柔性支撑板上升,当红外光栅检测到水平状态的柔性支撑板上有碗碟时,控制器控制链条机构停止转动,以待用餐人员取走碗碟,待碗碟被取走后,红外光栅检测到水平状态的柔性支撑板上没有碗碟,控制器控制链条机构继续转动,使得取走碗碟后的柔性支撑板转动到竖直状态,当红外光栅再次检测到水平状态的柔性支撑板上有碗碟时,控制器再次控制链条机构停止转动,以待用餐人员取走碗碟,待所有碗碟都被取走后,传送行走装置沿循迹线返回厨房。
以上仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
一种传送行走装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0