









专利摘要
本发明公开了一种极地长续航风力驱动式球形机器人,包括外球壳、第一风力叶片、第二风力叶片、第三风力叶片、支撑管和内球壳,所述内球壳通过若干根支撑管与外球壳固定连接,构成了球形机器人的刚性结构;一组第一风力叶片固定在内球壳上,两组第二风力叶片对称的安装在内球壳的前后两端,两组第三风力叶片对称的安装在两组第二风力叶片的前后两端。机器人通过风力被动式驱动,内外球壳采用具有减震装置的支撑管连接,能够起到减震、保护核心部件的效果;通过风力发电提供能源,具有良好的环境适应性和长续航特性,可广泛适用于极地等未知环境下探测的应用。
权利要求
1.一种极地长续航风力驱动式球形机器人,包括外球壳(1)、第一风力叶片(2)、第二风力叶片(3)、第三风力叶片(4)、支撑管(5)和内球壳(6),其特征在于,所述内球壳(6)通过若干根支撑管(5)与外球壳(1)固定连接,构成了球形机器人的刚性结构;一组第一风力叶片(2)固定在内球壳(6)上,两组第二风力叶片(3)对称的安装在内球壳(6)的前后两端,两组第三风力叶片(4)对称的安装在两组第二风力叶片(3)的前后两端。
2.根据权利要求1所述的极地长续航风力驱动式球形机器人,其特征在于,所述外球壳(1)为类似足球烯结构,采用若干圆管和连接头连接。
3.根据权利要求1所述的极地长续航风力驱动式球形机器人,其特征在于,所述内球壳(6)为椭圆形刚性壳体,内部放置电源装置、控制装置和发电装置。
4.根据权利要求1所述的极地长续航风力驱动式球形机器人,其特征在于,所述第一风力叶片(2)和第二风力叶片(3)的安装方向相反,在极地风力的作用下,第一风力叶片(2)带动整个球形机器人运动,第二风力叶片(3)转动方向与第一风力叶片(2)相反,带动发电装置工作,使得电源装置收集并存储电能。
5.根据权利要求1所述的极地长续航风力驱动式球形机器人,其特征在于,所述第二风力叶片(3)和第三风力叶片(4)分别在相互垂直的风向上旋转,能够在不同风向的情况下保证发电装置正常工作来获取电能。
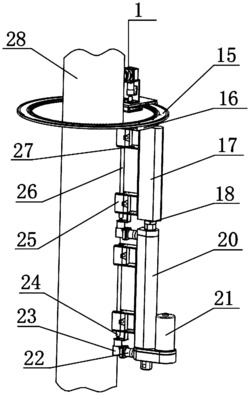
6.根据权利要求1所述的极地长续航风力驱动式球形机器人,其特征在于,所述支撑管(5)内部装有弹簧减震装置,当机器人运动过程中撞击到障碍物时,能够减缓冲击,避免内球壳(6)中的装置受到破坏。
说明书
技术领域
本发明涉及一种极地长续航风力驱动式球形机器人,是一种能应用于极地环境进行长续航探测工作的球形机器人。
背景技术
极地环境是一个低温、低光照和强风环境,极地具有丰富的油气、铁矿等资源,所以对极地的探测具有重大的战略意义。为了探索极地环境,智能机器人的应用受到了广泛地关注。如何在极地环境下实现机器人长续航的探测工作是一个研究难题,关键在于机器人能源的获取方式和环境适应性等指标。
其中,球形机器人作为一种滚动式机器人,与传统的轮式、轨道式或足式移动机器人相比,具有运动效率高、能量损耗小的特性。自1996年芬兰赫尔辛基科技大学和流浪者公司共同研制出第一个球形运动机器人后,球形机器人渐渐地成为了国内外机器人研究领域的一大热点。在国外,意大利比萨大学、伊朗加滋温阿萨德大学、密歇根州立大学、日本立命馆大学、日本神户大学等先后对球形机器人进行了研究,研制出了不同驱动形式的球形机器人。在国内,北京邮电大学、哈尔滨工业大学、西安电子科技大学、上海交通大学、上海大学等高校在球形机器人的研究方面也取得了一定的成果。
综合国内外球形机器人的研究来看,目前球形机器人的驱动方式主要有小车驱动、配重驱动、形变驱动和风力驱动。小车驱动式可控性差,运动速度受限;配重驱动式控制难度大;形变驱动式不能携带其他组件;风力驱动式过度依赖于风力。小车驱动式和配重驱动式为主动运动式机器人,驱动源不能提供长时间的续航;形变式机器人不能携带组件,所以这几种球形机器人不适宜用于极地环境的探测;风力驱动式球形机器人能够在风力充足的极地充分利用风力进行运动,为了获得更多探测数据,电源的长续航能力成为重要衡量指标。中国发明专利ZL200810017895.4公开了“一种风力驱动具有多种运动方式的环境探测球形机器人”,该机器人完全采用风力驱动,实现自由涌动,运动不可控,且内部系统供电需要额外电源,这样无法实现长续航长距离的极地作业需要。中国发明专利ZL201310558991.0公开了“一种极地长续航风力驱动式球形机器人”,该机器人通过内球壳表面的太阳能薄膜进行能源的获取和储存,但是其气囊式球壳的密闭性要求高,而且球面状太阳能薄膜光电转化效率低,不能够真正地实现长续航的极地探测工作。
发明内容
本发明的目的在于针对以上问题,提出一种极地长续航风力驱动式球形机器人,能够实现在极地低温强风环境下长续航长距离的极地探测。
为了实现以上目的,本发明的构思是:
本发明采用球形机构,能够很好的适应极地环境进行探测工作。机器人利用极地再生能源风能进行被动驱动,利用风力发电装置实现长续航长距离的工作。采用类足球烯的结构形成开放式的外球壳,实现保护缓震作用,采用足球烯的结构可以有效地解决较大的封闭式外球壳难加工的问题;所采用的控制系统和电源模块安装在内部刚性椭圆形球壳内,并用六根支撑管与外球壳相连接;采用的支撑管中空且每个支撑管装有相应的弹簧减震装置,以确保控制系统及发电装置能够更好地适应极地的恶劣环境。
根据以上发明构思,本发明采用以下技术方案:
一种极地长续航风力驱动式球形机器人,包括外球壳、第一风力叶片、第二风力叶片、第三风力叶片、支撑管和内球壳,所述内球壳通过若干根支撑管与外球壳固定连接,构成了球形机器人的刚性结构;一组第一风力叶片固定在内球壳上,两组第二风力叶片对称的安装在内球壳的前后两端,两组第三风力叶片对称的安装在两组第二风力叶片的前后两端。
所述外球壳为类似足球烯结构,采用若干圆管和连接头连接。
所述内球壳为椭圆形刚性壳体,内部放置电源装置、控制装置和发电装置。
所述第一风力叶片和第二风力叶片的安装方向相反,在极地风力的作用下,第一风力叶片带动整个球形机器人运动,第二风力叶片转动方向与第一风力叶片相反,带动发电装置工作,使得电源装置收集并存储电能。
所述第二风力叶片和第三风力叶片分别在相互垂直的风向上旋转,能够在不同风向的情况下保证发电装置正常工作来获取电能。
所述支撑管内部装有弹簧减震装置,当机器人运动过程中撞击到障碍物时,能够减缓冲击,避免内球壳中的装置受到破坏。
本发明机器人通过风力被动式驱动,类足球烯式球壳结构较为简单,零部件拆装方便且易于携带,外型美观,具有良好的结构特性,在其受到外力作用时能够起到一定的缓冲保护作用;而且内外球壳采用具有减震装置的支撑管连接,能够起到减震、保护核心部件的效果。若机器人在极地的特殊环境下被障碍物卡住不能运动时,仍然能够保证风力发电装置作业,保证在相关人员找到之前能够不间断地返回所在地理位置。
本发明与现有技术相比,具有如下突出实质性特点和显著优点:
本发明结构简单,体积较大,空间尺寸可为直径1.5m的球,能高效率的使用风能作为驱动能源,安装方便,且运动灵活;机器人运动遇到外部环境作用时,可以通过自身结构装置调整有效地适应极地复杂地形;通过风力发电装置进行再生能源利用,实现长续航长距离的野外极地作业需要。
附图说明
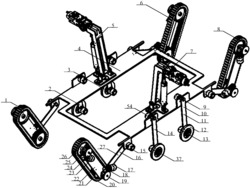
图1是本发明的整体立体结构示意图。
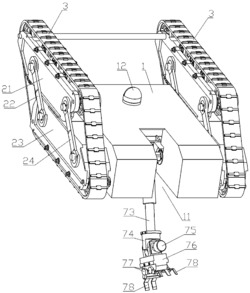
图2是本发明在平坦地面上的运动示意图。
图3是本发明碰到障碍物时的运动示意图。
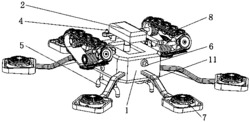
图4是本发明掉进横沟时的发电装置转动示意图。
具体实施方式
以下结合附图对本发明的优选实施例作进一步的说明。
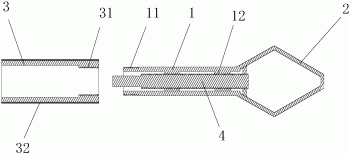
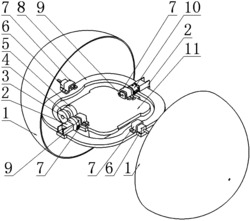
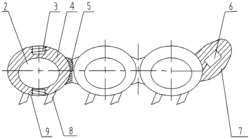
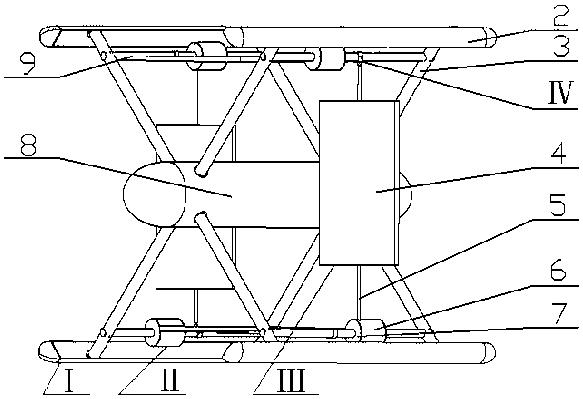
如图1所示,一种极地长续航风力驱动式球形机器人,包括外球壳1、第一风力叶片2、第二风力叶片3、第三风力叶片4、支撑管5和内球壳6,所述内球壳6通过若干根支撑管5与外球壳1固定连接,构成了球形机器人的刚性结构;一组第一风力叶片2固定在内球壳6上,两组第二风力叶片3对称的安装在内球壳6的前后两端,两组第三风力叶片4对称的安装在两组第二风力叶片3的前后两端。
所述外球壳1为类似足球烯结构,采用若干圆管和连接头连接。
所述内球壳6为椭圆形刚性壳体,内部放置电源装置、控制装置和发电装置。
所述第一风力叶片2和第二风力叶片3的安装方向相反,在极地风力的作用下,第一风力叶片2带动整个球形机器人运动,第二风力叶片3转动方向与第一风力叶片2相反,带动发电装置工作,使得电源装置收集并存储电能。
所述第二风力叶片3和第三风力叶片4分别在相互垂直的风向上旋转,能够在不同风向的情况下保证发电装置正常工作来获取电能。
所述支撑管5内部装有弹簧减震装置,当机器人运动过程中撞击到障碍物时,能够减缓冲击,避免内球壳6中的装置受到破坏。
本发明的工作过程如下:
如图2至图4所示,球形机器人通过极地充足的风能进行被动驱动,实现前进运动,具有很高的自由性和灵活性。内部刚性球壳6位于球心,实时掌握球形机器人的位姿信息,采集极地不同地方的气候参数。同时第二风力叶片3和第三风力叶片4连接内球壳6内部的发电装置,进行能源的获取和储存,实现机器人长续航长距离的探测工作。机器人运动时,通过装有弹簧减震装置的支撑管5的作用,可达到缓冲减震的效果,增加机器人的使用寿命,使机器人更好的适应极地恶劣环境。由于极地环境特殊,难以避免有一些障碍物或者横沟会使得球形机器人卡住而不能运动,在这种情况下,第二风力叶片3和第三风力叶片4能够适应不同的风向,使得发电装置继续工作,以保证不断地探测极地环境信息,而且在相关工作人员解决球形机器人被卡的问题之前,能够保证不断地向工作人员发送地理位置信息,以便工作人员进行寻找。
极地长续航风力驱动式球形机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0