






专利摘要
本发明公开了一种用于水下目标定位的声传播路径综合速度测定方法与装置,其方法是用所求综合速度代替传统测量声速,提高水下目标定位的精确性。其装置包括发射模块、阵列接收模块、控制模块、存储模块和中心处理模块,控制模块分别与发射模块、阵列接收模块、存储模块和中心处理模块相连,发射模块分别与阵列接收模块、控制模块、中心处理模块相连,阵列接收模块分别与发射模块、控制模块相连,中心处理模块分别与控制模块、发射模块、存储模块相连,存储模块分别与控制模块、中心处理模块相连。本发明跟传统水下目标定位测量不一样,采用了海水声速经验公式和多普勒效应测速,并综合考虑了海水温度、盐度、深度和海水流速等环境变量,精确性高。
权利要求
1.用于水下目标定位的声传播路径综合速度测定方法,其特征在于,包括以下步骤:
1)选取距离海平面h0米处作为参考平面,通过压力传感器感知h0米处的压力并从中计算出h0的具体数值,同时以超声发射位置为坐标原点,以垂直水平面向下为Z方向,建立空间三维坐标系,在X轴方向均匀布置N个波束线性阵列,并且设置阵元之间的间隔为Δx,第i个阵列的坐标为(xi,0,0),其中,i=1,2,3…,N,Δx=|xi-xi-1|;
2)构建频率为fs、波长为λs的单频信号进行发射,同时将波束线性阵列接收到的N个信号进行空间信号处理,通过近场波达方向DOA估计算法得到水下目标物体到每个阵元的传播路径方向上的方位角θi和俯仰角 以第1个阵元为参考阵元,则阵元i接收到的信号延时相对于参考阵元接收到的信号延时为:
第i个阵元到目标物体的俯仰角和方位角分别为:
3)在接收阵列中任取三个第m、n、l阵元(1≤m,n,l≤N),对应的坐标分别是(xm,0,0),(xn,0,0),(xl,0,0),根据上面公式(2)和公式(3)可得该三个阵元对应的俯仰角分别为 设水下目标物体坐标为(xD,yD,zD),建立如下方程组:
可以解得水下目标物体坐标(xD,yD,zD),得到目标物体所处的深度:
H=h0+zD (5)
4)利用温度传感器、盐度传感器和压力传感器感知所在范围内的温度T、盐度S和深度h信息,同时根据这些信息和声速经验公式计算海水声速,而在浅海测量范围内,可认为温度、盐度基本上不变,这里可直接取装置所在范围内的温度和盐度测量值,最终建立海水声速与深度h之间的声速剖面V声(h),同时推导出其平均声速大小为:
通过上述公式便可知各条声传播路径上的海水声速大小,其中第i条声传播路径上, 在X,Y,Z轴上的大小分别为:
5)将波束线性阵列所接收到的N路信号分别进行频率估计,得到接收信号的频率fi,其中i=1,2,3…,N,并利用声波的多普勒效应和步骤3)中所得水下目标的三维位置(xD,yD,zD)分别计算出水流在X,Y,Z轴三个方向上的平均速度大小
6)综合前面所得数据,便可计算出各条声传播路径上的综合速度大小,其中第i条声传播路径上的综合速度大小为:
2.一种用于水下目标定位的声传播路径综合速度测定装置,其特征在于:包括发射模块、阵列接收模块、控制模块、存储模块和中心处理模块,其中:
所述控制模块,分别与发射模块、阵列接收模块、存储模块和中心处理模块相连,用于对各个模块的控制;
所述发射模块,分别与阵列接收模块、控制模块、中心处理模块相连,根据控制模块的指令,从中心处理模块中的调制器中获取测量信号并进行超声发射;
所述阵列接收模块,分别与发射模块、控制模块相连,根据控制模块的指令,接收所测目标反射回来的信号,经接收放大器后传送给中心处理模块;
所述中心处理模块,分别与控制模块、发射模块、存储模块相连,根据控制模块的指令进行数据处理,并分析得到平均海水声速大小和水流速度大小,并利用水下物体的位置信息,对综合速度进行计算和得出结果;
所述存储模块,分别与控制模块、中心处理模块相连,根据控制模块的指令,将中心处理模块的综合速度进行存储。
3.根据权利要求2所述的一种用于水下目标定位的声传播路径综合速度测定装置,其特征在于:所述发射模块包括一个超声发射探头。
4.根据权利要求2所述的一种用于水下目标定位的声传播路径综合速度测定装置,其特征在于:所述阵列接收模块包括N个超声接收探头,其中N≥6。
说明书
技术领域
本发明涉及速度测量的技术领域,尤其是指一种用于水下目标定位的声传播路径综合速度测定方法与装置。
背景技术
水声探测是获取海洋信息的基本手段,而探测精度是水声探测的根本目标。水声探测的一个关键技术就是水下目标定位,并从定位中得到水下目标的距离和方位等信息。然而,水下目标定位受到水流、压强、温度、盐度等引起的声速变化,导致最终定位的不精确性,这些影响无论在中远程探测还是在近程探测中都存在。
目前,海水中主要靠声纳装置对各种声学特性进行测量,对水下物体进行探测、判别、定位和追踪。海水声速测量方法主要有两种:直接法和间接法。其中,直接测量法使用一般称为“声速仪”的设备,通常利用收发换能器在固定的距离内测量声速,同时以压力传感器及温度补偿装置测量水深,根据获取声速的方法的不同,通常又分为环鸣法、脉冲叠加法、驻波干涉法以及相位法等;间接法测量海水声速是基于海水中的声速与温度、盐度和静压力的函数关系,采用CTD测量海水的温度、盐度和压力随深度的变化,进而通过经验公式来计算声速,主要声速经验公式有三个,分别是Del Grosso声速算法、Wilson声速算法、Chen-Millero-Li声速算法。直接测量海水声速可信度高,但设备不易小型化,测量费效率低,在实际海洋声速测量中,常用间接法。
传统的水下目标定位中,比如近场波达方向(简称:DOA)估计,声速常以测量中所得的某点值引入,然后根据速率、波长和频率的公式V=λf得到波长所对应的频率,代入阵列流型矩阵进行方位角度估计。近年来,也有一些学者研究了提高水下目标定位精度的声速修正方法,例如张小凤等人研究了基于加权最小二估计的双基地声呐定位算法,杨豪强等人研究了水下目标定位中的声线折射修正方法,但是这些方法计算量大,而且在修正测量的时候都没有考虑到水流场的影响,这是使得声波产生频移的一方面原因,因此同样给测量精度带来影响。
因此,人们需要一种新的用于水下目标定位的声速传播路径综合速度测定方法来满足要求。
发明内容
本发明的目的在于克服现有技术的不足,提供一种用于水下目标定位的声传播路径综合速度测定方法与装置,用所求综合速度代替传统测量声速,提高水下目标定位的精确性。
为实现上述目的,本发明所提供的技术方案其用于水下目标定位的声传播路径综合速度测定方法,包括以下步骤:
1)选取距离海平面h0米处作为参考平面,通过压力传感器感知h0米处的压力并从中计算出h0的具体数值,同时以超声发射位置为坐标原点,以垂直水平面向下为Z方向,建立空间三维坐标系,在X轴方向均匀布置N个波束线性阵列,并且设置阵元之间的间隔为Δx,第i个阵列的坐标为(xi,0,0),其中,i=1,2,3…,N,Δx=|xi-xi-1|;
2)构建频率为fs、波长为λs的单频信号进行发射,同时将波束线性阵列接收到的N个信号进行空间信号处理,通过近场波达方向DOA估计算法得到水下目标物体到每个阵元的传播路径方向上的方位角θi和俯仰角 以第1个阵元为参考阵元,则阵元i接收到的信号延时相对于参考阵元接收到的信号延时为:
第i个阵元到目标物体的俯仰角和方位角分别为:
这里,矩阵Φi为N×N的对角矩阵,包含了俯仰角信息,满足:
3)在接收阵列中任取三个第m、n、l阵元(1≤m,n,l≤N),对应的坐标分别是(xm,0,0),(xn,0,0),(xl,0,0),根据上面公式(2)和公式(3)可得该三个阵元对应的俯仰角分别为 设水下目标物体坐标为(xD,yD,zD),建立如下方程组:
可以解得水下目标物体坐标(xD,yD,zD),得到目标物体所处的深度:
H=h0+zD (5)
4)利用温度传感器、盐度传感器和压力传感器感知所在范围内的温度T、盐度S和深度h信息,同时根据这些信息和声速经验公式计算海水声速,而在浅海测量范围内,可认为温度、盐度基本上不变,这里可直接取装置所在范围内的温度和盐度测量值,最终建立海水声速与深度h之间的声速剖面V声(h),同时推导出其平均声速大小为:
通过上述公式便可知各条声传播路径上的海水声速大小,其中第i条声传播路径上, 在X,Y,Z轴上的大小分别为:
5)将波束线性阵列所接收到的N路信号分别进行频率估计,得到接收信号的频率fi,其中i=1,2,3…,N,并利用声波的多普勒效应和步骤3)中所得水下目标的三维位置(xD,yD,zD)分别计算出水流在X,Y,Z轴三个方向上的平均速度大小
6)综合前面所得数据,便可计算出各条声传播路径上的综合速度大小,其中第i条声传播路径上的综合速度大小为:
本发明所述的用于水下目标定位的声传播路径综合速度测定装置,包括发射模块、阵列接收模块、控制模块、存储模块和中心处理模块,其中:
所述控制模块,分别与发射模块、阵列接收模块、存储模块和中心处理模块相连,用于对各个模块的控制;
所述发射模块,分别与阵列接收模块、控制模块、中心处理模块相连,根据控制模块的指令,从中心处理模块中的调制器中获取测量信号并进行超声发射;
所述阵列接收模块,分别与发射模块、控制模块相连,根据控制模块的指令,接收所测目标反射回来的信号,经接收放大器后传送给中心处理模块;
所述中心处理模块,分别与控制模块、发射模块、存储模块相连,根据控制模块的指令进行数据处理,并分析得到平均海水声速大小和水流速度大小,并利用水下物体的位置信息,对综合速度进行计算和得出结果;
所述存储模块,分别与控制模块、中心处理模块相连,根据控制模块的指令,将中心处理模块的综合速度进行存储。
所述发射模块包括一个超声发射探头。
所述阵列接收模块包括N个超声接收探头,其中N≥6。
本发明与现有技术相比,具有如下优点与有益效果:
1、本发明跟传统水下目标定位测量不一样,综合考虑了海水温度、盐度、深度和海水流速等环境变量,精确性高。
2、本发明采用了海水声速经验公式和多普勒效应测速,使得发明装置成本低廉、安装简单。此外,现代处理器计算处理能力的不断提高,本发明的计算不会是难题,保证了本发明的可行性。
3、本发明采用的是声波测量,而声波在水下的衰减较小,因此适合水下的速度测量。
附图说明
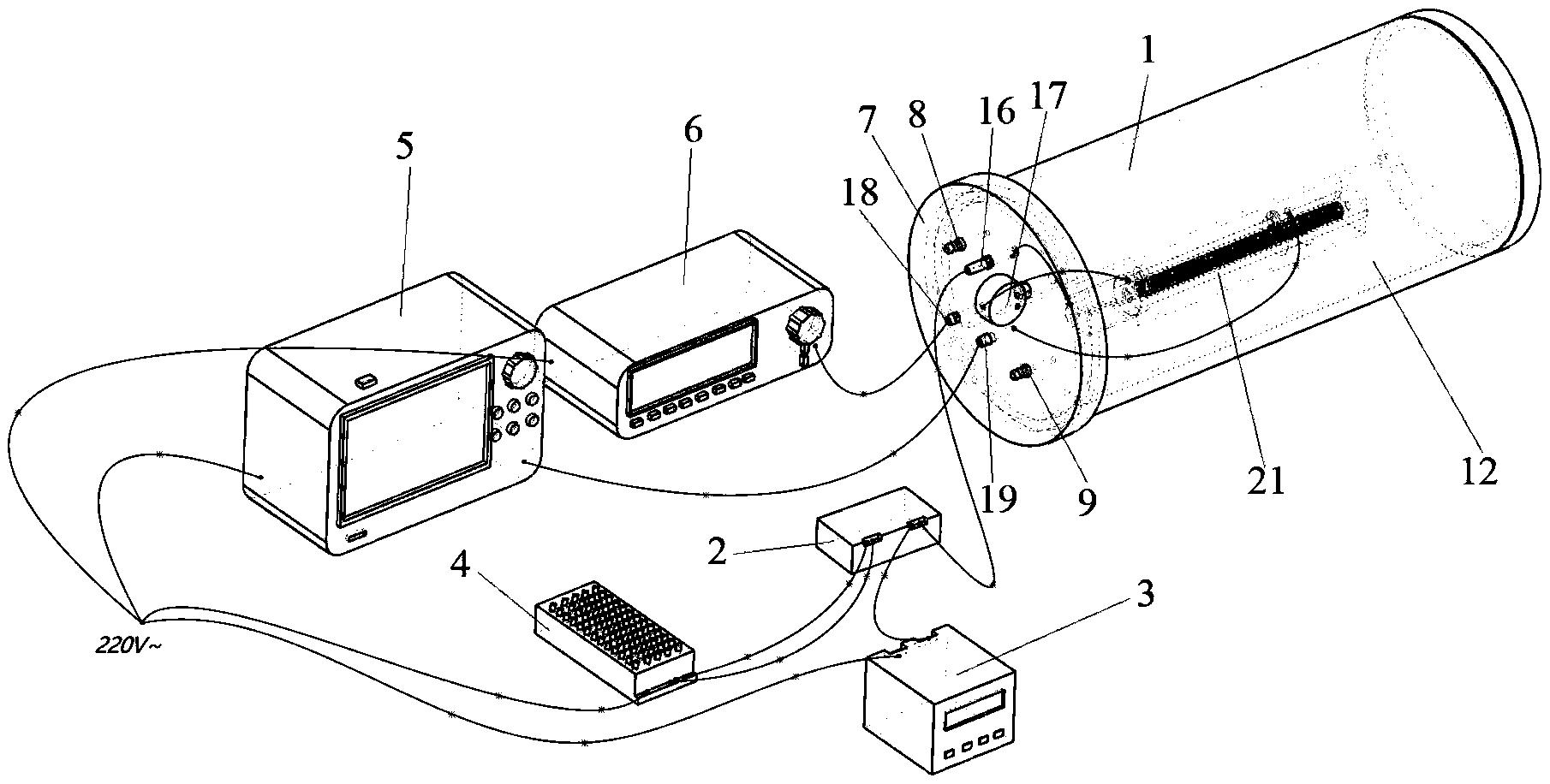
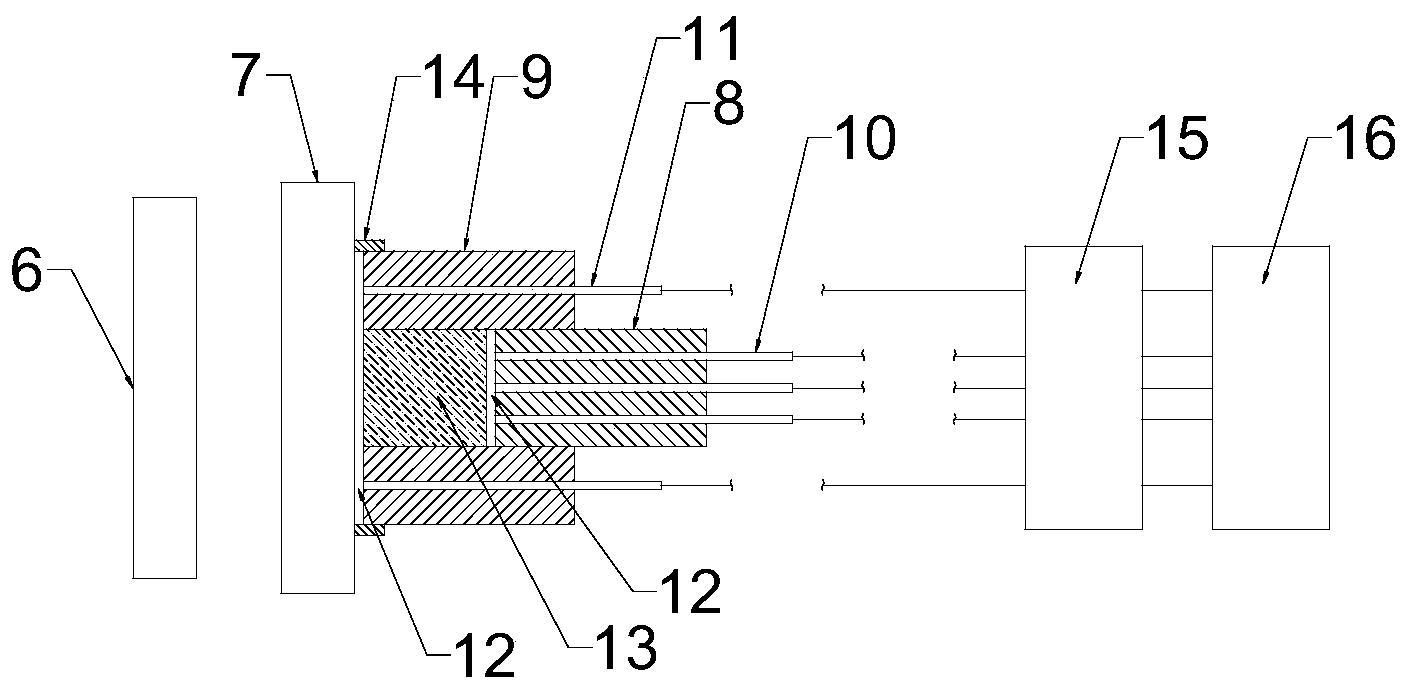
图1为本发明所述的用于水下目标定位的声传播路径综合速度测定装置的硬件结构图。
图2为本发明所述的用于水下目标定位的声传播路径综合速度测定方法所建立的空间三维坐标系。
图3为水下目标物体到第i个接收阵元的声传播路径方向上的方位角θi和俯仰角 示意图。
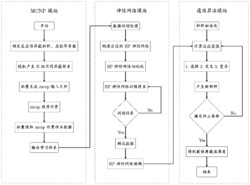
图4为计算水下目标物体坐标以及目标物体所在位置海水深度的流程图。
图5为计算海水平均声速大小 以及 在X、Y、Z坐标轴上的声速大小流程图。
图6为本发明在感知目标近程范围的压力、温度、盐度等环境信息下作出的海水声速剖面示意图。
图7为结合方位信息和海水平均声速大小计算各条声传播路径上综合速度大小的流程图。
图8为第i条声传播路径上平均海水声速、平均水流速度与综合速度大小的关系示意图。
具体实施方式
下面结合具体实施例对本发明作进一步说明。
本实施例所述的用于水下目标定位的声传播路径综合速度测定方法,用所求综合速度代替传统测量声速,提高水下目标定位的精确性。其包括以下具体步骤:
1)选取距离海平面h0米处作为参考平面,通过压力传感器感知h0米处的压力并从中计算出h0的具体数值,同时以超声发射位置为坐标原点,以垂直水平面向下为Z方向,建立空间三维坐标系,在X轴方向均匀布置N个波束线性阵列,并且设置阵元之间的间隔为Δx,第i个阵列的坐标为(xi,0,0),其中,i=1,2,3…,N,Δx=|xi-xi-1|;
2)构建频率为fs、波长为λs的单频信号进行发射,同时将波束线性阵列接收到的N个信号进行空间信号处理,通过传统的近场波达方向DOA估计算法(如ESPRIT算法)得到水下目标物体到每个阵元的传播路径方向上的方位角θi和俯仰角 以第1个阵元为参考阵元,则阵元i接收到的信号延时相对于参考阵元接收到的信号延时为:
第i个阵元到目标物体的俯仰角和方位角分别为:
这里,矩阵Φi为N×N的对角矩阵,包含了俯仰角信息,满足:
3)在接收阵列中任取三个第m、n、l阵元(1≤m,n,l≤N),对应的坐标分别是(xm,0,0),(xn,0,0),(xl,0,0),根据上面公式(2)和公式(3)可得该三个阵元对应的俯仰角分别为 设水下目标物体坐标为(xD,yD,zD),建立如下方程组:
可以解得水下目标物体坐标(xD,yD,zD),得到目标物体所处的深度:
H=h0+zD (5)
4)利用温度传感器、盐度传感器和压力传感器感知所在范围内的温度T(单位:℃)、盐度S(单位:‰)和深度h(单位:m)信息,同时根据这些信息和声速经验公式(如常见的Dell Grosso公式、Wilson精确公式、Chen-Millero-Li公式等)计算海水声速。本发明主要用于浅海测量,而在浅海测量范围内,可认为温度、盐度基本上不变,这里可直接取装置所在范围内的温度和盐度测量值,最终建立海水声速与深度h之间的声速剖面V声(h),同时推导出其平均声速大小为:
通过上述公式便可知各条声传播路径上的海水声速大小,其中第i条声传播路径上, 在X,Y,Z轴上的大小分别为:
5)将波束线性阵列所接收到的N路信号分别进行频率估计,得到接收信号的频率fi,其中i=1,2,3…,N,并利用声波的多普勒效应和步骤3)中所得水下目标的三维位置(xD,yD,zD)分别计算出水流在X,Y,Z轴三个方向上的平均速度大小
6)综合前面所得数据,便可计算出各条声传播路径上的综合速度大小,其中第i条声传播路径上的综合速度大小为:
以下为能够实现本实施例上述声传播路径综合速度测定方法的装置,包括发射模块、阵列接收模块、控制模块、存储模块和中心处理模块。所述控制模块分别与发射模块、阵列接收模块、存储模块和中心处理模块相连,用于对各个模块的控制;所述发射模块分别与阵列接收模块、控制模块、中心处理模块相连,根据控制模块的指令,从中心处理模块中的调制器中获取测量信号并进行超声发射;所述阵列接收模块分别与发射模块、控制模块相连,根据控制模块的指令,接收所测目标反射回来的信号,经接收放大器后传送给中心处理模块;所述中心处理模块分别与控制模块、发射模块、存储模块相连,根据控制模块的指令进行数据处理,并分析得到平均海水声速大小和水流速度大小,并利用水下物体的位置信息,对综合速度进行计算和得出结果;所述存储模块分别与控制模块、中心处理模块相连,根据控制模块的指令,将中心处理模块的综合速度进行存储;所述发射模块包括一个超声发射探头,阵列接收模块包括N个超声接收探头,其中N≥6。
上述测量装置的硬件架构如图1所示,主要包括超声波发射探头、超声波接收探头阵列、A/D转换器、D/A转换器、温度传感器、盐度传感器、压力传感器、电源和USB接口。其中,处理器可采用TMS320VC5509A型号的DSP芯片实现,它主要实现信号频率估计、波达方向估计、海水平均声速计算和水流速度大小计算,最终综合得到各条声传播路径上的综合速度大小;温度传感器、盐度传感器和压力传感器用于感知装置范围内的海水温度、盐度和压力信息,用于海水声速剖面的计算。
基于上述声传播路径综合速度测定方法,本发明所述装置工作的主要步骤如下:
步骤一:如图2所示,建立空间三维坐标系,选取距离海平面5米处作为参考平面,以超声发射位置为坐标原点,以垂直水平面向下为Z方向,同时,在X轴方向均匀布置6个波束线性阵列,阵元之间的间隔Δx=2米。
步骤二:控制模块控制超声发射探头发射单频超声信号S(t),信号的频率为fs=34kHz,脉冲长度为5ms。
步骤三:控制模块控制阵列接收模块接收回波信号,此处使用全部六个超声接收探头,接收所获得的信号分别为R1(t),R2(t),R3(t),R4(t),R5(t),R6(t),将接收到的信号传递给中心处理模块。
步骤四:中心处理模块首先对各个探头的接收信号进行阵列信号处理,如图5所示,通过传统的DOA估计中的ESPRIT算法得到每条声传播路径上的方位角θ1,θ2,θ3,θ4,θ5,θ6和俯仰角 信息,水下目标物体到第i个接收阵元的声传播路径方向上的方位角θi和俯仰角 示意图如图3所示。
步骤五:取前面三个阵元,坐标分别为(x1,0,0),(x2,0,0),(x3,0,0),设水下目标物体坐标为(xD,yD,zD),结合步骤四中的方位角和俯仰角信息建立方程组:
联立解出水下目标物体坐标(xD,yD,zD)以及目标物体的海水深度H=5+zD,流程图参考图4。
步骤六:如图5所示流程图,在离海水平面5米范围内,亦即装置所在范围内,利用温度传感器、盐度传感器和压力传感器测得温度T、盐度S、深度h信息。本发明主要用于浅海测量,而在浅海测量范围内,可认为温度、盐度基本上不变,这里可直接取装置所在范围内的温度和盐度测量值。
目前的经验公式主要有Dell Grosso公式、Wilson精确公式、Chen-Millero-Li公式等,这里选用较适合我国海区的Wilson简化公式来确定声速剖面:
V(C,T,h)=1449.2+4.6T-0.055T2+0.00029T3+(1.34-0.01T)(S-35)+0.016h
式中T为海水温度(单位:℃),S为海水盐度(单位:‰),h为海水深度(单位:m),T、S值取装置范围内所测量到的值,如图6所示,建立海水声速与深度h之间的声速剖面V声(h),用数值积分推导出其平均声速大小为:
于是可知各条声传播路径上的海水声速,其中第i条声传播路径上, 在X,Y,Z轴上的大小分别为:
其中,i=1,2,…,6。
步骤七:如图7所示流程图,将阵列接收模块接收到的6路信号分别进行频率估计,计算得到接收信号的频率f1,f2,f3,f4,f5,f6,并利用声波的多普勒效应和步骤五中所得到水下目标的三维位置(xD,yD,zD)分别计算出水流在X,Y,Z轴三个方向上的平均速度大小 最后综合计算出各条声传播路径上的综合速度大小,其中第i条声传播路径上的综合速度大小为:
其中,i=1,2,…,6,在第i条声传播路径上,平均海水声速、平均水流速度与综合速度大小的关系示意图如图8所示。
以上所述之实施例子只为本发明之较佳实施例,并非以此限制本发明的实施范围,故凡依本发明之形状、原理所作的变化,均应涵盖在本发明的保护范围内。
用于水下目标定位的声传播路径综合速度测定方法与装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0