






专利摘要
提供一种能够在由机器人装置进行的液体的处理操作中简便地进行液体的排出或抽吸的吸移管装置。提供一种被机器人装置把持的吸移管装置,该吸移管装置具有:驱动部,其进行液体的抽吸和/或排出;接收部,其接收来自所述机器人装置的信号;以及控制部,其根据所述信号来控制所述驱动部。
权利要求
1.一种吸移管装置,被机器人装置把持,该吸移管装置具有:
驱动部,其进行液体的抽吸和/或排出;
接收部,其接收来自所述机器人装置的信号;
控制部,其根据所述信号来控制所述驱动部;
管头连接部,其用于连接与所述液体接触的管头;
信息获取部,其获得在与所述管头连接部连接的状态下的所述管头的位置信息以及与所述驱动部的状态有关的信息;以及
发送部,其向所述机器人装置发送所述管头的位置信息以及与所述驱动部的状态有关的信息。
2.根据权利要求1所述的吸移管装置,其特征在于,
所述驱动部具备柱塞,
与所述驱动部的状态有关的信息包括所述柱塞的位置信息。
3.根据权利要求1或2所述的吸移管装置,其特征在于,
所述管头的位置信息基于通过所述机器人装置而所述管头能够移动的范围内所存在的物品中的任一个以上的物品与所述管头的距离。
4.根据权利要求1或2所述的吸移管装置,其特征在于,
所述信息获取部具备内压传感器,该内压传感器探测向所述管头的内侧施加的压力。
5.根据权利要求1或2所述的吸移管装置,其特征在于,
所述信息获取部具备压力传感器,该压力传感器探测向所述管头连接部的与所述管头接触的面施加的压力。
6.根据权利要求1或2所述的吸移管装置,其特征在于,
所述信息获取部获取与所述液体的状态有关的信息,
所述发送部向所述机器人装置发送与所述液体有关的信息。
7.根据权利要求1或2所述的吸移管装置,其特征在于,
基于所述信号以及与所述驱动部的状态有关的信息来控制将所述液体抽吸到所述管头的速度和/或从所述管头排出所述管头中保持的所述液体的速度。
8.根据权利要求1或2所述的吸移管装置,其特征在于,
根据所述信号来控制所述液体的抽吸和/或排出的定时。
9.根据权利要求1或2所述的吸移管装置,其特征在于,
所述控制部通过无线通信来控制所述驱动部。
10.一种液体处理系统,具备机器人装置和被该机器人装置把持的吸移管装置,
所述吸移管装置具有:
驱动部,其进行液体的抽吸和/或排出;
接收部,其接收来自所述机器人装置的信号;
控制部,其根据所述信号来控制所述驱动部;
管头连接部,其用于连接与所述液体接触的管头;
信息获取部,其获得在与所述管头连接部连接的状态下的所述管头的位置信息以及与所述驱动部的状态有关的信息;以及
发送部,其向所述机器人装置发送所述管头的位置信息以及与所述驱动部的状态有关的信息,
其中,基于所述管头的位置信息以及与所述驱动部的状态有关的信息来控制所述机器人装置的动作。
11.根据权利要求10所述的液体处理系统,其特征在于,
所述机器人装置具备臂部,
该臂部具有多个关节。
12.根据权利要求11所述的液体处理系统,其特征在于,
所述机器人装置具备控制盘和计算机。
13.根据权利要求12所述的液体处理系统,其特征在于,
所述计算机包括从由输入部、发送部、接收部、显示部、控制部以及存储部形成的组中选择的部。
说明书
技术领域
本发明涉及一种吸移管装置以及液体处理系统。更详细地说,涉及一种被机器人装置把持的吸移管装置等。
背景技术
作为用于计量液体并进行分注等的器具,在生物学、化学等领域中使用各种吸移管。特别是,以手动或电动方式移动内部的柱塞并抽吸或排出规定量的液体的吸移管装置由于其液体的计量简便,因此优选地用于液体的分注操作。
例如,在专利文献1中公开了“一种吸移管装置,具备:吸移管外壳;滑动轴,其通过按钮操作来进行上下移动;柱塞,其配置在该滑动轴的下方;至少一个弹簧,其对该柱塞向上方施力;卡合体,其与该滑动轴同轴地嵌合于该滑动轴,以至少能够上下移动的方式贯穿所述外壳侧的孔;以及电动马达,其设置于与所述滑动轴的轴心不同的轴心位置,致动地连结卡合于卡合体”。在该吸移管装置中,在手动操作时,通过按钮的操作使滑动轴和柱塞上下移动,来进行液体的抽吸和排出,另外,在电动操作时,通过马达的驱动来驱动卡合体以使其上下移动,由此柱塞上下移动来进行液体的抽吸和排出,由此能够切换地进行手动操作和电动操作这两种操作。
专利文献1:日本特开2002-113373号公报
发明内容
另外,正开发一种进行还包括上述液体的分注作业在内的液体的处理作业的机器人装置。在这种机器人装置中还存在一种能够用臂部分操作由人使用的实验器具的机器人装置。但是,存在以下情况:机器人装置的臂部即使能够通过夹住物品或推动物品的动作来处理吸移管装置,也难以在恰当的时间按下设置于吸移管装置的操作按钮。
因此,本发明的主要目的在于提供一种能够在由机器人装置进行的液体的处理操作中简便地进行液体的排出或抽吸的吸移管装置。
为了解决上述问题,本发明提供一种被机器人装置把持的吸移管装置,该吸移管装置具有:驱动部,其进行液体的抽吸和/或排出;接收部,其接收来自所述机器人装置的信号;以及控制部,其根据所述信号来控制所述驱动部。
也可以是,所述吸移管装置具有:管头连接部,其用于连接与所述液体接触的管头;信息获取部,其获得在与所述管头连接部连接的状态下的所述管头的位置信息以及与所述驱动部的状态有关的信息;以及发送部,其向所述机器人装置发送所述管头的位置信息以及与所述驱动部的状态有关的信息。
也可以是,所述驱动部具备柱塞,与所述驱动部的状态有关的信息包含所述柱塞的位置信息。
也可以是,所述管头的位置信息基于通过所述机器人装置而所述管头能够移动的范围内所存在的物品中的任一个以上的物品与所述管头的距离。
所述信息获取部能够具备探测向所述管头的内侧施加的压力的内压传感器,另外,所述信息获取部也能够具备探测向所述管头连接部的与所述管头接触的面施加的压力的压力传感器。
能够设为所述信息获取部获取与所述液体的状态有关的信息,所述发送部向所述机器人装置发送与所述液体有关的信息。
另外,也可以是,基于所述信号以及与所述驱动部的状态有关的信息来控制将所述液体抽吸到所述管头的速度和/或从所述管头排出所述管头中保持的所述液体的速度。
并且,也可以是,根据所述信号来控制所述液体的抽吸和/或排出的定时。
也能够设为所述控制部通过无线通信来控制所述驱动部。
另外,本发明提供一种具备机器人装置和被该机器人装置把持的吸移管装置的液体处理系统,所述吸移管装置具有:驱动部,其进行液体的抽吸和/或排出;接收部,其接收来自所述机器人装置的信号;以及控制部,其根据所述信号来控制所述驱动部。
也可以是,所述吸移管装置具有:管头连接部,其用于连接与所述液体接触的管头;信息获取部,其获得在与所述管头连接部连接的状态下的所述管头的位置信息以及与所述驱动部的状态有关的信息;以及发送部,其向所述机器人装置发送所述管头的位置信息以及与所述驱动部的状态有关的信息,其中,基于所述管头的位置信息以及与所述驱动部的状态有关的信息来控制所述机器人装置的动作。
另外,也可以是,所述机器人装置具备臂部,该臂部具有多个关节。
并且,也可以是,所述机器人装置具备控制盘和计算机。
所述计算机能够包括从由输入部、发送部、接收部、显示部、控制部以及存储部形成的组中选择的部。
根据本发明,提供一种能够在由机器人装置进行的液体的处理操作中简便地进行液体的排出或抽吸的吸移管装置等。
附图说明
图1是表示本发明的第一实施方式所涉及的液体处理系统的结构的概要的图。
图2是表示第一实施方式的机器人装置的结构例的示意图。
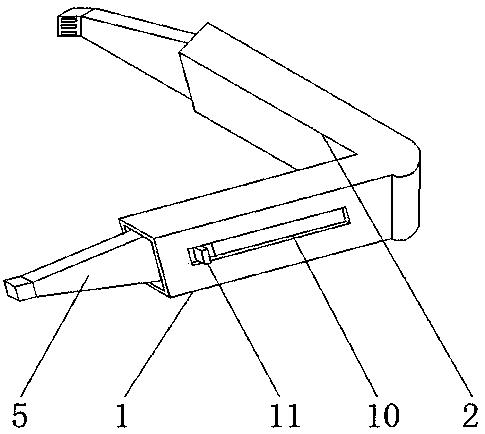
图3是表示第一实施方式的吸移管装置的结构例的示意图。
图4是表示第一实施方式的液体处理系统的液体处理方法的概要的流程图。
图5是表示液体处理系统中的管头的定位工序的概要的流程图。
图6是表示液体处理系统中的液体的抽吸工序的概要的流程图。
图7是表示液体处理系统中的液体的排出工序的概要的流程图。
图8是表示第一实施方式的变形实施方式所涉及的液体处理系统中具备的吸移管装置的结构例的示意图。
图9是表示第一实施方式的变形实施方式所涉及的液体处理系统的液体处理方法的概要的流程图。
图10是表示液体处理系统中的管头连接工序的概要的流程图。
图11是表示第二实施方式所涉及的液体处理系统中的液体的抽吸工序的概要的流程图。
图12是表示第三实施方式所涉及的液体处理系统的概要的图。
图13是表示第三实施方式的吸移管装置的结构例的示意图。
图14是表示第三实施方式的液体处理系统的液体处理方法的概要的流程图。
图15是表示第三实施方式的液体处理系统所进行的、与液体的状态有关的信息的获取工序的概要的流程图。
图16是表示液体处理系统的错误处理方法的一例的流程图。
图17是表示本发明的液体处理系统的结构的概要的图。
图18是表示本发明的吸移管装置的结构例的示意图。
具体实施方式
下面,对用于实施本发明的优选的方式进行说明。此外,以下说明的实施方式示出了本发明的代表性的实施方式,并不会由此狭义地解释本发明的范围。
1.本发明的第一实施方式所涉及的液体处理系统
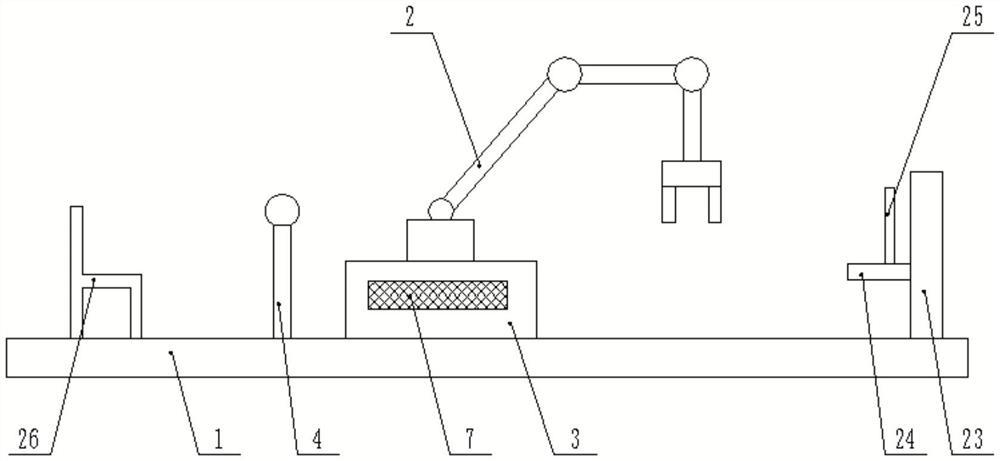
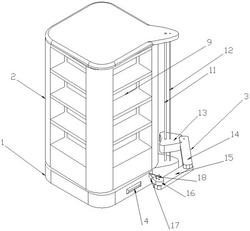
图1是表示作为本发明的第一实施方式的液体处理系统的概要的图。图1中用附图标记D1表示的液体处理系统大致具备机器人装置1a和被机器人装置1a把持的吸移管装置2a。一边参照图1~图3一边按顺序说明这些液体处理系统D1的结构。
<机器人装置>
首先,对机器人装置1a进行说明。本实施方式的液体处理系统D1中具备的机器人装置1a是用于在由后述的吸移管装置2a进行的液体的抽吸或排出中把持吸移管装置2a并使吸移管装置2a向期望的位置移动的结构。图2示意性地表示机器人装置1a的结构的一例。如图2所示,本实施方式的机器人装置1a可以具备臂部11来作为用于使所把持的吸移管装置2a移动的结构。并且,机器人装置1a也可以具有支承臂部11的主体部14。此外,在图2中,没有图示出后述的接收部12、发送部13以及控制部15的各结构。
另外,作为用于把持吸移管装置2a的结构,也可以在臂部11的端部例如具有爪部111。并且,臂部11优选具有多个关节112a、112b。能够利用多个关节112a、112b使臂部11进行更加复杂的动作。此外,图2所示的机器人装置1a具有设置有两个关节112a、112b的臂部11,但在本实施方式所涉及的机器人装置1a中,设置于臂部11的关节112a、112b的个数如果是多个,则不限定其个数,能够根据由机器人装置1a进行的动作等的复杂度来适当设计。
机器人装置1a所具有的臂部11的个数为1以上即可,但机器人装置1a优选具备多个臂部11。在具备多个臂部11的情况下,即使在一个臂部11把持着吸移管装置2a的状态下,也能够同时进行其它器具的操作。因此,例如在利用吸移管装置2a抽吸液体时,能够利用其它臂部11使收容有液体的容器倾斜。此外,在机器人装置1a所具有的臂部11为多个的情况下,多个臂部11的形状也可以各不相同。各个臂部11能够根据由该臂部11进行的动作来适当设计。
另外,机器人装置1a具有接收来自后述的吸移管装置2a的信号的接收部12和向吸移管装置2a发送信号的发送部13(参照图1)。作为接收部12和发送部13,例如能够使用通信用设备。
除此以外,也可以在机器人装置1a中设置用于控制机器人装置1a整体的控制部15、用于用户输入机器人装置1a的动作程序等的输入部、显示动作程序的内容的显示部等(在图1中输入部和显示部未图示)。
关于控制部15,能够与机器人装置1a的构造、设置场所等相应地从公知的结构中适当选择。控制部15例如也能够设为微型计算机、微处理器、程序控制器(PLC:可编程逻辑控制器)或继电器控制盘。另外,也能够将机器人控制器、通用计算机用作控制部15。
这样,控制部15可以由一个设备构成,但也可以由多个设备构成。作为多个设备的例子,例如可以由机器人控制器、程序控制器以及通用计算机构成。在该情况下,多个设备互相协作或独立地进行机器人装置1a本身和吸移管装置2a的控制所需的处理。但是,这些处理在多个设备中的分工等并没有特别的限定。
关于输入部和显示部,也能够与机器人装置1a的构造、设置场所等相应地从公知的结构中适当选择。关于输入部,例如也能够设为鼠标、键盘、触摸面板、按钮、开关、控制杆或作为示教操作终端的示教盒。显示部例如也能够设为显示器或打印机。
并且,也可以在机器人装置1a中设置有存储部16,以用于存储动作程序、与吸移管装置2a的抽吸量或排出量有关的数据。对于存储部16,能够与机器人装置1a的构造、设置场所等相应地从公知的存储介质中适当选择。作为存储介质,例如能够列举出磁存储介质、光存储介质、光磁存储介质等。另外,作为这些存储介质,例如能够列举出硬盘(Hard DiskDrive)、闪速存储器、SSD(Solid State Drive:固态驱动器)等。除此以外,也能够构成为:机器人装置1a的动作程序、抽吸量或排出量等的设定值等在被存储于软盘(FD:FlexibleDisk)等磁盘、压缩光盘(CD:Compact Disc)、DVD(Digital Versatile Disc:数字化通用光盘)等光盘、MO(Magneto-Optical disk:磁光盘)等光磁盘等之后,通过将这些盘安装于驱动器并将该驱动器与控制部15连接而被读入控制部15。
所述接收部、发送部、控制部、输入部、显示部以及存储部能够组合一个部或多个部并使通用计算机执行其功能。例如,本发明能够采用图17示出的结构。在此,将机器人装置1a、控制盘1b、通用计算机1d统称为机器人部1。该机器人部可以与吸移管装置无线连接。即,控制盘1b和计算机1d能够经由无线网络与吸移管装置2a连接。
另外,所述控制盘1b也可以被组装到机器人装置1a中。
<吸移管装置>
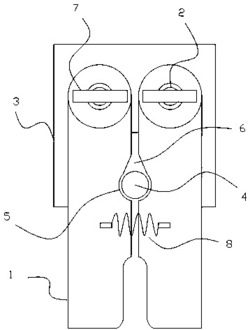
接着,参照图1和图3来说明吸移管装置2a。图3是表示本实施方式的吸移管装置2a的结构例的示意图。吸移管装置2a至少具有进行液体的抽吸和/或排出的驱动部21、接收来自机器人装置1a的信号的接收部22以及对驱动部21进行控制的控制部23。另外,外壳24a、24b、24c是用于收容这些结构、后述的信息获取部26a等的壳体。在图3中,控制部23收容于外壳24a,但控制部23也能够设置在外壳24a、24b、24c的外部。另外,吸移管装置2a优选具有:管头连接部25a,其用于连接与液体接触的管头T;信息获取部26a,其获得在与管头连接部25a连接的状态下的管头T的位置信息以及与驱动部21的状态有关的信息;以及发送部27,其向机器人装置1a发送管头T的位置信息以及与驱动部21的状态有关的信息(参照图1)。除此以外,在吸移管装置2a中也可以设置有把持部281(参照图3),以使机器人装置1a利用爪部111等把持吸移管装置2a。
此外,假设吸移管装置2a进行例如0.1μl至1ml左右的少量液体的抽吸和/或排出,但也可以如图18那样应用于计量吸移管用的吸移管装置2d。吸移管装置2d被机器人装置1a利用把持部281把持,计量吸移管311与外壳24a连接,通过按下抽吸按钮283来抽吸液体,通过按下排出按钮284来排出液体。
以下,详细地说明吸移管装置2a的各结构。
<驱动部>
驱动部21是用于在吸移管装置2a中进行容器等中收容的液体的、向管头T内的抽吸以及从管头T内向管头T外的排出的结构。驱动部21具备柱塞211,通过利用柱塞211吸入和排出缸(cylinder)内的空气来向连接于后述的管头连接部25a的管头T抽吸规定量的液体或者从管头T排出规定量的液体。另外,作为使柱塞211移动的动力源,只要是能够搭载于外壳24a、24b、24c内的动力源即可,不限定其结构。作为动力源,例如能够列举出步进电动机。除此以外,在驱动部21中还具备向柱塞211传递来自电动机等动力源的动力的传递机构。除此以外,关于驱动部21的结构,能够与吸移管装置2a的大小、要进行处理的液体的性质等相应地基于公知的手动或电动吸移管装置中具备的结构来自由地设计。
在本发明中,液体只要是液状即可,其成分没有特别限定。作为液体,例如能够列举出蒸馏水、细胞培养液、生理盐水以及溶解有引物、抗体等各种试剂的液体等。另外,在液体中还含有血液、血清、血浆、骨髓液、尿等液状的生物体试样。除此以外,液体中还包含凝胶状的物体。
<接收部>
在吸移管装置2a中,接收部22是用于接收来自机器人装置1a的信号的接口。该信号例如是控制由吸移管装置2a进行的液体的抽吸或排出的定时的信号。除此以外,接收部22还能够接收从机器人装置1a发送的与向管头T抽吸液体的抽吸量、从管头T排出液体的排出量、向管头T抽吸液体的速度、从管头T排出管头T中保持的液体的速度有关的数据等。
<控制部>
控制部23是用于根据由上述接收部22接收到的信号来对驱动部21的动作进行控制从而进行液体的抽吸或排出的结构。除此以外,控制部23还能够作为用于控制吸移管装置2a整体的结构来使用。关于控制部23,能够从公知的结构中适当地采用。作为控制部23,例如能够列举出微型计算机、微处理器、程序控制器(PLC:可编程逻辑控制器)等。另外,控制部23、上述接收部22以及后述的发送部27例如也能够由具备CPU、存储器、硬盘以及通信设备等的通用的计算机构成。
控制部23优选通过无线通信来控制驱动部21。设置在外壳24a、24b、24c的外部的控制部23与驱动部21进行无线通信,由此不需要用线缆等将控制部23与驱动部21之间连接。因此,在臂部11把持吸移管装置2a的把持部281并进行移动时,不必担心线缆限制移动距离、线缆接触臂部11或设置于臂部11周边的物品。例如能够使用无线LAN(Local AreaNetwork:局域网)、WUSB(Wireless USB:无线通用串行总线)用的通信卡等进行无线通信。另外,优选在外壳24a、24b、24c内具备作为驱动部21等的电源的电池。由于电源收纳在外壳24a、24b、24c内,因此不需要将电源与驱动部21等连接的线缆,机器人装置1a对吸移管装置2a进行操作时的操作性提高。此外,也可以构成为:在外壳24a、24b、24c内具备电池的情况下,还从吸移管装置2a向机器人装置1a发送与电池的剩余量有关的信息。
<管头连接部>
管头连接部25a是用于连接在抽吸或排出液体时与液体接触的管头T的结构。另外,在管头连接部25a中,管头T以能够装卸的方式进行连接。管头连接部25a只要能够连接管头T即可,其结构没有特别限定,其形状能够与所采用的管头T相应地适当设计。例如也能够通过使形成为管状的管头连接部25a的外径比管头T的内径小来将管头连接部25a嵌入管头T,从而将管头T安装于管头连接部25a。
此外,对于向管头连接部25a连接的管头T,能够采用由合成树脂等形成的公知的吸移管管头。另外,通过将管头T设为一次性使用(用过即仍),即使在用一台吸移管装置2a进行组成等不同的多种液体的处理的情况下,也能够防止这些液体互相污染。
<信息获取部>
信息获取部26a是用于至少获得与上述管头连接部25a接触的状态下的“管头T的位置信息”以及“与驱动部21的状态有关的信息”的结构。在本实施方式所涉及的液体处理系统D1中,优选从吸移管装置2a的发送部27向机器人装置1a发送这两种信息,由此基于这两种信息来对机器人装置1a的动作进行控制。即,优选根据从吸移管装置2a发送的信息对机器人装置1a进行反馈控制。
管头T的位置信息例如是与在机器人装置1a把持着吸移管装置2a的把持部281的状态下的管头T的顶端的位置有关的信息,也能够用X轴、Y轴、Z轴等坐标轴等来表示。与驱动部21的状态有关的信息只要是表示驱动部21的状态的信息即可,可以是任意信息,例如能够列举出柱塞的位置信息、柱塞的加速度的信息等。另外,在上述驱动部21具有步进电动机的情况下,也能够将步进电动机的脉冲数、具备步进电动机的致动器的转数等设为与驱动部21的状态有关的信息。基于后述的理由,在信息获取部26a获取的与驱动部21的状态有关的信息中优选至少包含柱塞211的位置信息。柱塞211的位置信息例如也能够设为柱塞211相对于收容柱塞211的缸的位置的信息。
信息获取部26a只要构成为至少能够获取上述两种信息即可,其结构没有特别限定。例如,信息获取部26a优选具备传感器以获取这些信息。对于信息获取部26a中具备的传感器,能够与吸移管装置2a的大小、要进行处理的液体的种类等相应地从公知的传感器中采用适当的传感器。另外,也能够在信息获取部26a中采用多个检测对象或检测方法不同的传感器。在信息获取部26a中设置有多个传感器的情况下,也能够根据要获取的信息来切换所要利用的传感器。另外,也可以为了获取一种信息而同时使用多个传感器。
信息获取部26a例如也能够将传感器探测到的压力等的值等按原样作为信息向发送部27发送。另外,信息获取部26a也能够判定传感器探测到的值等是否超过预先决定的基准值,并将其判定结果作为信息。
作为用于获得与驱动部21的状态有关的信息的传感器,例如能够列举出图像传感器、距离传感器、加速度传感器等。作为距离传感器,例如能够列举出利用光电激光器的传感器、利用超声波的传感器、利用静电量的传感器等各传感器。另外,也可以在信息获取部26a中设置有上述传感器中的多个传感器。
作为用于获得管头T的位置信息的传感器,例如能够列举出压力传感器、图像传感器、距离传感器等。作为距离传感器,例如能够列举出利用光电激光器的传感器、利用超声波的传感器、利用静电量的传感器等各传感器。另外,也可以在信息获取部26a中设置上述传感器中的多个传感器。
也能够将信息获取部26a所获取的管头T的位置信息设为基于通过机器人装置而连接于管头连接部25a的管头T能够移动的范围内所存在的物品中的任一个以上的物品与管头T的距离的信息。管头T能够移动的范围内所存在的物品例如是在机器人装置1a的周边的地面、作业台等上载置的物品,具体地说,例如能够列举出实验器具、实验装置等。另外,这些物品中还包括收容有液体的容器、分注液体的管、瓶。
在本实施方式的机器人装置中,吸移管装置2a没有固定于机器人装置1a的臂部11,因此也能够在没有把持吸移管装置2a时操作其它实验设备。在这种情况下,其它实验设备也被放置在臂部11周边。另外,将多个实验设备等高精度地配置在规定的位置对于用户而言负担大。在本实施方式的液体处理系统D1中,将管头T的位置信息发送到机器人装置1a来控制机器人装置1a的动作,由此例如即使在其它实验设备没有被配置在预先设定的位置的情况下,也能够防止管头T与其它实验设备等的接触。另外,也能够预先设定机器人装置1a,使得将管头T接触到其它实验设备等的情况作为信息向机器人装置1a发送,由此防止接触后的管头T与容器内的液体接触而污染液体。
另外,信息获取部26a例如优选具备探测向管头T的内侧施加的压力的内压传感器。能够利用内压传感器在收容有液体的容器内基于压力的变化来获取管头T的位置信息。在该情况下,管头T的位置信息例如也能够设为基于容器内的液体的液面与管头T的顶端的距离的信息。另外,通过利用内压传感器监视管头T的内压,能够在液体的抽吸时等检测管头T与管头连接部25a的连接状态是否恰当。并且,还能够利用内压传感器获取后述的与液体的状态有关的信息。
<发送部>
在吸移管装置2a中,发送部27是用于向机器人装置发送数据的接口。该数据中包含由信息获取部26a获取到的、在与管头连接部25a接触的状态下的管头T的位置信息以及与驱动部21的状态有关的信息。例如,在机器人装置1a中,控制部15能够基于这些信息来控制臂部11等的动作。
2.由第一实施方式所涉及的液体处理系统进行的液体的处理
对本实施方式的液体处理系统D1的动作进行说明。即,对液体处理系统D1的液体处理方法进行说明。图4是表示由液体处理系统D1进行的液体的处理的整体动作的概要的流程图。如图4所示,在液体的处理方法中具有管头的定位工序S11、液体的抽吸工序S12、管头的定位工序S13以及液体的排出工序S14各工序。此外,本实施方式的液体处理系统D1通过抽吸并排出规定量的液体而能够适用于液体的分注操作,但例如也能够用于重复进行液体的抽吸和排出并搅拌液体的操作、从收容在容器中的液体仅抽吸特定的层来将该层从容器去除的操作等。因而,本实施方式的液体处理系统D1的用途并不限定于液体的分注。
图5是表示液体处理系统D1中的管头的定位工序S11的概要的流程图。参照图5来详细地说明管头T的定位工序S11。
在液体处理系统D1中,首先,机器人装置1a发送开始对与吸移管装置2a连接的管头T进行定位的信号(图5、S1111)。在吸移管装置2a中,当接收到信号时使信息获取部26a启动(图5、S1121),并向机器人装置1a发送已启动的信号。当机器人装置1a接收到信号时,开始进行管头的定位,使吸移管装置2a移动,以使管头T向预先设定的规定的位置(设定坐标轴)移动(图5、S1112)。关于设定坐标轴,例如能够将X轴、Y轴、Z轴各坐标轴预先保存到存储部16等中。
在管头T向设定位置移动的期间,信息获取部26a可以持续地向机器人装置1a发送管头T的位置信息。在该情况下,能够将管头T的位置信息设为基于通过机器人装置1a而管头T能够移动的范围内所存在的物品中的任一个以上的物品与管头T的距离的信息。这些物品是如上所述的物品。另外,在工序S1112中,为了避免管头T与物品的接触,信息获取部26a优选具有距离传感器或图像传感器。
当管头T向在机器人装置1a中预先设定的坐标轴的移动完成时,机器人装置1a向吸移管装置2a发送管头T的位置信息的获取开始信号(图5、S1113)。在接收到信号的吸移管装置2a中,由信息获取部26a获取管头T的位置信息,并向机器人装置1a发送该信息(图5、S1122)。
此时,在工序S1112中,在信息获取部26a获取到管头T的位置信息并向机器人装置1a发送的情况下,信息获取部26a还能够在工序S1113的最开始,切换管头T的位置信息的内容。具体地说,能够将管头T的位置信息从基于与管头T能够移动的范围内所存在的物品之间的距离的位置信息切换为基于与容器中收容的液体的液面或容器的底面之间的距离的位置信息。另外,例如在信息获取部26a具有多种传感器的情况下,也能够根据在工序S1112和工序S1113各工序中发送的信号来切换所使用的传感器。例如,接收到工序S1113的信号的吸移管装置2a的信息获取部26a也能够将所使用的传感器从图像传感器切换为距离传感器。
在机器人装置1a中判定管头T的位置信息是否满足预先决定的基准(图5、S1114),在满足基准的情况下,向吸移管装置2a发送结束管头的位置信息的获取的信号(图5、S1116),吸移管装置2a结束管头的位置信息的获取(图5、S1123),管头T的定位动作完成。
另一方面,在不满足基准的情况下,机器人装置1a对管头T的位置进行校正(图5、S1115)。作为具体例,如果由信息获取部26a中具备的距离传感器测定的管头T的顶端与容器内的液面的距离比基准长,则对臂部11进行驱动来使管头T的位置向下方移动,以使该距离满足基准。另外,如果上述距离比基准值短,则使管头T的位置向上方移动,以使该距离满足基准。
在液体处理系统D1中,重复进行管头T的位置信息的获取开始信号的发送(S1113)、管头T的位置信息的获取(S1122)、与基准的比较(S1114)以及管头T位置的校正(S1115)各工序,由此能够在作为下一个工序的液体的抽吸(图4、S12)中将管头T定位于最佳的位置。
图6是表示液体处理系统D1中的液体的抽吸工序S12的概要的流程图。参照图6来详细地说明液体的抽吸工序S12。
在液体处理系统D1中,首先,机器人装置1a向吸移管装置2a发送开始进行液体的抽吸的信号(图6、S1211)。优选将与液体的抽吸量有关的信息同在本工序S1211中发送的信号一起从机器人装置1a向吸移管装置2a发送。除此以外,优选也将与液体的抽吸速度有关的信息从机器人装置1a向吸移管装置2a发送。在吸移管装置2a中,当接收到信号时使信息获取部26a启动(图6、S1221),向机器人装置1a发送与驱动部21的状态有关的信息(图6、S1222)。另外,在吸移管装置2a中,为了根据信号来进行液体的抽吸,开始在驱动部21中移动柱塞211(图6、S1223)。
在获取到与驱动部21的状态有关的信息的机器人装置1a中,开始驱动臂部11(图6、S1212)。在接收到来自吸移管装置2a的抽吸完成信号(图6、S1226)之前,持续该从吸移管装置2a的信息的获取。例如,机器人装置1a从吸移管装置2a接收柱塞211的位置信息来作为与驱动部21有关的信息。在机器人装置1a中,还能够基于该信息来对臂部11进行驱动,利用没有把持吸移管装置2a的其它臂部11使收容有液体的容器与液体的抽吸速度相应地倾斜。另外,还能够使管头T的位置与向管头T抽吸液体的抽吸速度相应地向下方移动。这样,在液体处理系统D1中,能够使机器人装置1a与吸移管装置2a同步来进行液体的抽吸工序S12。
另一方面,在吸移管装置2a中,控制部23基于与驱动部21的状态有关的信息例如使柱塞211持续移动,直到柱塞211的位置到达设定的值为止(图6、S1224)。设定值例如能够设为对应于与液体的抽吸量相当的柱塞211的移动量等的值。与来自机器人装置1a的抽吸开始的信号同样地,通过从机器人装置1a向吸移管装置2a侧发送设定值,能够在吸移管装置2a中决定液体的抽吸量。
当柱塞211的移动量达到设定值时,在吸移管装置2a中结束柱塞211的移动(图6、S1225)。之后,从吸移管装置2a向机器人装置1a发送液体的抽吸完成的信号(图6、S1226),在接收到信号的机器人装置1a中,臂部11的驱动结束(图6、S1213),由液体处理系统D1进行的液体的抽吸动作完成。
在抽吸液体之后,在液体处理系统D1中再次进行管头T的定位工序S13,以向期望的容器等排出液体。管头T的定位动作与作为上述液体的抽吸工序S12之前的工序的管头T的定位工序S11中的定位动作相同。因此,省略对管头的定位工序S13的说明。
图7是表示由液体处理系统D1进行的液体的排出工序S14的概要的流程图。参照图7来详细地说明液体的排出工序S14。
在液体处理系统D1中,首先,机器人装置1a向吸移管装置2a发送开始排出的信号(图7、S1411)。优选将与液体的排出量有关的信息同在本工序S1411中发送的信号一起从机器人装置1a向吸移管装置2a发送。除此以外,优选也将与液体的排出速度有关的信息从机器人装置1a向吸移管装置2a发送。在吸移管装置2a中,当接收到信号时使信息获取部26a启动(图7、S1421),向机器人装置1a发送与驱动部21的状态有关的信息(图7、S1422)。另外,在吸移管装置2a中,为了根据信号来进行液体的排出,开始在驱动部21中移动柱塞211(图7、S1423)。
在获取到与驱动部21的状态有关的信息的机器人装置1a中,开始驱动臂部11(图7、S1412)。在接收到来自吸移管装置2a的排出完成信号(图7、S1426)之前,持续进行该从吸移管装置2a的信息的获取。例如,机器人装置1a从吸移管装置2a接收柱塞211的位置信息来作为与驱动部21有关的信息。在机器人装置1a中,还能够基于该信息来对臂部11进行驱动,利用没有把持吸移管装置2a的其它臂部11使收容有液体的容器与液体的排出速度相应地移动。另外,还能够使管头T的位置与从管头T排出液体的排出速度相应地向上方移动。这样,在液体处理系统D1中,能够使机器人装置1a与吸移管装置2a同步来进行液体的排出工序S14。
另一方面,在吸移管装置2a中,控制部23基于与驱动部21的状态有关的信息例如使柱塞211持续移动,直到柱塞211的位置到达设定的值为止(图7、S1424)。设定值例如能够设为对应于与液体的排出量相当的柱塞211的移动量等的值。与来自机器人装置1a的排出开始的信号同样地,通过从机器人装置1a向吸移管装置2a侧发送设定值,能够在吸移管装置2a中决定液体的排出量。
当柱塞211的移动量达到设定值时,在吸移管装置2a中结束柱塞211的移动(图7、S1425)。之后,从吸移管装置2a向机器人装置1a发送液体的排出完成的信号(图7、S1426),在接收到信号的机器人装置1a中,臂部11的驱动结束(图6、S1413),由液体处理系统D1进行的液体的排出动作完成。
在上述液体的排出工序S14中说明了一次排出液体的情况,但例如也可以将液体的排出动作设定为向多个容器连续地分注液体。在该情况下,也通过由吸移管装置2a接收到来自机器人装置1a的液体的排出开始的信号来开始吸移管装置2a中的液体的分注。并且,也可以从机器人装置1a向吸移管装置2a发送用于在一次排出液体的动作与液体的连续分注动作之间进行切换的信号。
在本实施方式的液体处理系统D1中,如上所述那样从机器人装置1a向吸移管装置2a发送液体的抽吸开始和/或排出开始的信号。其结果,吸移管装置2的控制部23能够根据信号开始进行液体的抽吸和/或排出。即,根据从机器人装置1a发送的信号来控制液体的抽吸和/或排出的定时。因此,在本实施方式的液体处理系统D1中,机器人装置1a的臂部11、爪部111不需要为了液体的抽吸和/或排出而操作用于对柱塞211进行驱动的按钮、控制杆等。因而,即使不对臂部11设定复杂的动作也能够利用由机器人装置1a把持的吸移管装置2a来简便地进行液体的抽吸和/或排出。另外,由于不需要复杂的动作,因此还能够简化臂部11的爪部111等的结构。
在本实施方式的液体处理系统D1中,在从机器人装置1a向吸移管装置2a发送液体的抽吸量和排出量的设定值的情况下,不需要如公知的手动或电动吸移管那样通过操作吸移管侧来输入液量的设定。因此,臂部11不需要进行用于向吸移管输入设定值的复杂的动作,能够进一步简化液体处理系统D1的动作程序。
并且,在液体处理系统D1中,在从机器人装置1a向吸移管装置2a发送液体的抽吸速度和排出速度的设定值的情况下,与使用公知的手动吸移管的情况不同,不需要利用爪部111等进行以规定的速度按下设置于吸移管的按钮等的动作、以规定的速度从按下了所述按钮的状态恢复为原来的位置的动作。因此,臂部11不需要进行复杂的动作,能够进一步简化液体处理系统D1的动作程序。
在本实施方式的液体处理系统D1中,具有获取管头T的位置信息的信息获取部26a,由此由机器人装置1a进行的管头T的定位的精度提高。因此,例如即使在按检体而液量不同的情况下,也能够通过对预先决定的管头的位置与实际的液面的误差进行校正来可靠地抽吸期望的液量。另外,例如关于用户设置容器等的位置,也能够使预先决定的位置与实际的位置的误差的容许范围扩大。
并且,在本实施方式的液体处理系统D1中,通过信息获取部26a获取与驱动部21的状态有关的信息,能够在液体的抽吸和/或排出时与液体的流速等相应地驱动臂部11。因此,例如,不制作复杂的程序就能够使机器人装置1a进行在利用人手进行的吸移管操作中一边保持液面与吸移管管头顶端之间的适当距离一边抽吸或排出液体的动作等。
3.第一实施方式的变形实施方式所涉及的液体处理系统
关于第一实施方式的变形实施方式所涉及的液体处理系统D11,在图8中示出吸移管装置2b的结构。吸移管装置2b的除设置于信息获取部26b的外压传感器261以外的结构与第一实施方式所涉及的液体处理系统D1的吸移管装置2a的结构相同,因此省略对相同结构的说明。另外,机器人装置也是与第一实施方式的机器人装置1a相同的结构,因此省略说明。
如图8所示,信息获取部26b至少具备压力传感器,该压力传感器探测向管头连接部25a的与管头T接触的面施加的压力。在本实施方式和后述的实施方式中,该压力传感器在管头连接部25a的外表面与管头T接触,因此为了方便而将该压力传感器称为外压传感器261。能够利用外压传感器261更加可靠地进行后述的管头T向管头连接部25a的连接。作为外压传感器,例如能够采用负荷传感器(load cell)等。
特别是,信息获取部26b优选除了具备外压传感器261以外还具备上述内压传感器。通过在信息获取部26b中具备内压传感器和外压传感器261这两方,能够将管头T更加恰当地连接于管头连接部25a。
4.由第一实施方式的变形实施方式所涉及的液体处理系统进行的液体的处理
图9是表示第一实施方式的变形实施方式所涉及的液体处理系统D11的动作的概要的流程图。如图9所示,在本实施方式中,在管头的定位工序S11之前具有管头连接工序S10。管头连接工序S10是向吸移管装置2b的管头连接部25a连接管头T的工序。如上所述,管头T例如也能够使用一次性使用的管头。以下,参照图10来说明管头连接工序S10。此外,从管头的定位工序S11到液体的排出工序S14与上述的各工序相同,因此在此省略说明。
在管头连接工序S10中,首先,机器人装置1a向吸移管装置2b发送开始连接管头T的信号(图10、S1011)。在吸移管装置2b中,当接收到信号时使信息获取部26b启动(图10、S1021)。另外,机器人装置1a使正在把持的吸移管装置2b移动,使得将管头连接部25a向预先决定的位置(设定位置)定位(图10、S1012)。
当吸移管装置2b的移动完成时,机器人装置1a发送开始获取管头T的位置信息的信号(图10、S1013)。吸移管装置2b接收该信号并向机器人装置1a发送管头T的位置信息(图10、S1022)。在此所述的管头T的位置信息不是在连接于管头连接部25a的状态下的管头T的位置信息,而是例如处于收容在管头盒等中的状态的管头T的位置信息。另外,在工序S1022中,信息获取部26b所使用的传感器优选是距离传感器或图像传感器。能够利用距离传感器或图像传感器测定吸移管连接部25a相对于管头T的距离。
在获取到管头T的位置信息的机器人装置1a中判定位置信息是否满足基准(图10、S1014)。在满足基准的情况下,机器人装置1a开始进行按下正在把持的吸移管装置2b的动作(图10、S1015)。
在所述位置信息没有满足基准的情况下,机器人装置1a判定是否能够通过对臂部11进行驱动来应对(图10、S1018)。关于该判定,也能够设置基准并根据是否满足基准来进行判定。在判定为能够应对的情况下,机器人装置1a对臂部11进行驱动(图10、S1019),再次向吸移管装置2b发送管头T的位置信息的获取开始信号,在管头T的位置信息满足基准之前重复进行工序S1013和工序S1014。此外,在工序S1018中判定为无法通过臂部11的驱动来应对的情况下,机器人装置1a结束管头连接工序S10。
在工序S1014中管头T的位置信息满足基准并开始按下吸移管装置2b之后,在吸移管装置2b中,利用信息获取部26b获取与向管头安装部25a的与管头T接触的面施加的压力有关的信息并发送到机器人装置1a(图10、S1023)。另外,与压力有关的信息既可以是具体的压力值,也可以是基于预先决定的规则等对压力值进行变换而得到的值,只要是基于由外压传感器261探测到的压力值的信息,就可以是任意的信息。
在机器人装置1a中判定从吸移管装置2b发送的与压力有关的信息是否满足基准(图10、S1016)。在满足基准的情况下,机器人装置1a向吸移管装置2b发送管头连接完成的信号(图10、S1017),管头的连接工序S10完成。
另一方面,在工序S1016中与压力有关的信息不满足基准的情况下,机器人装置1a继续再次按下吸移管,并在满足基准之前重复进行工序S1015和工序S1016。
在本实施方式所涉及的液体处理系统D11中,通过在信息获取部26b中具备外压传感器261,能够基于向管头连接部25a的与管头T接触的面施加的压力的变化来确认管头连接部25a与管头T的连接状态。因此,能够防止在液体的抽吸、排出的过程中管头T脱离管头连接部25a而污染液体等。
另外,在信息获取部26b中具备距离传感器或图像传感器的情况下,能够基于在管头T的连接中预先设定的位置的信息以及从吸移管装置2b发送的管头T的位置信息这两方来对臂部11进行驱动。因此,与仅利用预先设定的位置的信息来连接管头T的情况相比,能够更可靠地向管头连接部25a连接管头T。本实施方式所涉及的液体处理系统D11的其它效果与上述的第一实施方式所涉及的液体处理系统D1相同。
此外,在从管头连接部25a卸下管头T的情况下,也能够按照图5所示的管头定位工序S11进行管头T相对于管头T的废弃用容器等的定位,但如果废弃用容器的开口部具有足够的大小,则也可以利用臂部11使吸移管装置2b移动到被预先设定为管头T的废弃的位置的地点,不进行精确的定位就卸下管头T。另外,关于管头T的卸下,也可以在吸移管装置2b中设置管头卸下用的喷射器按钮282,利用设置于臂部11的爪部111等按下喷射器按钮282来从管头连接部25a卸下管头T。
5.本发明的第二实施方式所涉及的液体处理系统
参照图11对本发明的第二实施方式所涉及的液体处理系统D2的动作进行说明。此外,液体处理系统D2的结构与第一实施方式所涉及的液体处理系统D1的结构相同,因此省略各结构的说明。
图11是表示第二实施方式所涉及的液体处理系统D2的液体的抽吸动作的概要的流程图。在液体处理系统D2中,基于来自机器人装置1a的信号以及与驱动部21的状态有关的信息来控制向管头T抽吸液体的速度和/或从管头T排出管头T中保持的液体的速度。
在液体处理系统D2中,首先,机器人装置1a向吸移管装置2a发送开始抽吸的信号(图11、S2211)。另外,液体的抽吸量和抽吸速度的设定值也一并被发送到吸移管装置2a。在吸移管装置2a中,当接收到信号时使信息获取部26a启动(图11、S2221),向机器人装置1a发送与驱动部21的状态有关的信息(图11、S2222)。另外,在吸移管装置2a中,为了根据信号来进行液体的抽吸,开始在驱动部21中移动柱塞211(图11、S2223)。
在获取到与驱动部21的状态有关的信息的机器人装置1a中开始驱动臂部11(图11、S2212)。关于该臂部11的驱动,与图6所示的液体的抽吸工序中的工序S1212相同。
另一方面,在吸移管装置2a中,控制部23基于与驱动部21的状态有关的信息例如持续移动柱塞211,直到柱塞211的位置到达设定的值为止(图11、S2225)。另外,在本实施方式所涉及的液体处理系统D2中,控制部23基于由信息获取部26a获取的与驱动部21的状态有关的信息来判定液体的抽吸速度是否与设定值一致(图11、S2224),在不一致的情况下,对驱动部21的驱动进行控制来进行抽吸速度的重新调整,以成为预先决定的液体的抽吸速度(图11、S2226)。
当柱塞211的移动量达到设定值时,在吸移管装置2a中结束柱塞211的移动(图11、S2227)。之后,从吸移管装置2a向机器人装置1a发送液体的抽吸完成的信号(图11、S2228),臂部11的驱动结束(图11、S2213),由液体处理系统D2进行的液体的抽吸动作完成。
关于液体的排出,也与上述的抽吸同样地从机器人装置1a向吸移管装置2a发送液体的排出量和排出速度的设定值。另外,信息获取部26a获取与驱动部21的状态有关的信息,由此在排出速度与设定值不一致的情况下,控制部23也能够对驱动部21进行控制来使排出速度与排出速度的设定值一致。
在本实施方式所涉及的液体处理系统D2中,如上所述,能够通过信息获取部26a获取与驱动部21的状态有关的信息,对液体的抽吸速度和排出速度进行反馈控制。因此,能够更加可靠地以预先设定的流速抽吸并排出液体。本实施方式所涉及的液体处理系统D2的其它效果与上述的第一实施方式所涉及的液体处理系统D1相同。
6.本发明的第三实施方式所涉及的液体处理系统
在图12中示出本发明的第三实施方式所涉及的液体处理系统D3的结构的概要。在液体处理系统D3中具备的机器人装置1c的结构中,除分析部17以外的结构与第一实施方式所涉及的液体处理系统D1中具备的机器人装置1a的结构相同,因此对相同的结构标注相同的附图标记并省略其说明。
图12所示的分析部17是用于分析后述的与液体的状态有关的信息的结构。对于分析部17,例如也能够采用具备CPU、存储器等的通用计算机,另外,在控制部15采用了通用计算机的情况下,也可以用一台通用计算机来构成控制部15和分析部17。
在图13中表示吸移管装置2c的结构例。对图13所示的各结构中的、与第一实施方式所涉及的液体处理系统D1中具备的吸移管装置2a相同的结构标注相同的附图标记并省略其说明。
在液体处理系统D3中,吸移管装置2c中具备的信息获取部26c能够获取与液体有关的信息。如图13所示,信息获取部26c优选具备用于除了上述的信息以外还获取与液体的状态有关的信息的传感器。关于该传感器,只要能够获取与液体的状态有关的信息,则该传感器的结构就能够从公知的传感器中适当地采用。例如能够列举出压力传感器、温度传感器、pH传感器、光传感器、吸光度传感器、浊度传感器、图像传感器、距离传感器等。另外,传感器既可以是一种,也能够组合多种传感器来使用。
与液体的状态有关的信息例如是指液体中是否存在气泡、液体中是否混入异物、液体的粘度、液体的浊度、液体的温度、液体的pH、液体的吸光度、液体的荧光强度等。另外,液体例如如果是细胞培养液,则与液体的状态有关的信息还能够包括培养液中的细胞数。信息获取部26c既可以仅获取这种与液体的状态有关的信息中的一项,也可以获取这种与液体的状态有关的信息中的多项。
图13示出作为信息获取部26c的一例而设置有以下四种传感器的结构:用于探测向管头连接部25c的与管头T接触的面施加的压力的压力传感器(外压传感器261)、用于探测向管头T的内侧施加的压力的内压传感器262、图像传感器263以及距离传感器264。此外,各传感器的配置并不限定于图13所示的配置,能够根据吸移管装置2c的大小、所要处理的液体的性质、机器人装置1c的爪部111的形状等来适当设计。
另外,用于获取与液体的状态有关的信息的传感器也可以与用于获取上述的管头T的位置信息、与驱动部21的状态有关的信息的传感器并用。在并用传感器的情况下,机器人装置1c也可以被设定为根据动作将对传感器所检测的对象等进行切换的信号发送到吸移管装置2c。
另外,在吸移管装置2c中,管头连接部25c中的至少与管头T接触的部分E由具有导电性的材料形成。作为具有导电性的材料,例如能够列举出金、铂、氮化钛等金属、碳等。另外,为了获取后述的与液体的状态有关的信息,连接于管头连接部25c的管头T也优选使用具有导电性的管头T。另外,也能够通过改变所使用的管头T的种类来改变后述的与液体的状态有关的信息中的要获取的信息。作为具有导电性的管头T,例如能够列举出碳制管头。通过使用这些管头T,还能够在液体的抽吸工序、液体的排出工序中与液体的抽吸、排出一并获取与液体的状态有关的信息。
7.由第三实施方式所涉及的液体处理系统进行的液体的处理
图14是表示液体处理系统D3的液体的处理方法的概要的流程图。如图14所示,液体的处理方法具有管头连接工序S31、管头的定位工序S32、液体的抽吸工序S33、与液体的状态有关的信息的获取工序S34、管头的定位工序S35以及液体的排出工序S36各工序。在这些工序中,除了与液体的状态有关的信息的获取工序S34以外,与第一实施方式的液体处理系统D1中的液体处理工序具有同一名称的工序为相同工序。因此,省略这些工序的说明。此外,只要能够获取后述的与液体的状态有关的信息,则在液体的处理方法中,与液体的状态有关的信息的获取工序S34并不限定于图14所示的顺序。例如,也可以在液体的抽吸工序S33之前进行与液体的状态有关的信息的获取工序S34。
图15是表示与液体的状态有关的信息的获取工序S34的概要的流程图。在本工序S34中,机器人装置1c向吸移管装置2c发送开始获取与液体的状态有关的信息的信号(图15、S3411)。在吸移管装置2c中控制部23使信息获取部26c启动(图15、S3421)。吸移管装置2c获取与液体的状态有关的信息,发送部27向机器人装置1c发送与液体的状态有关的信息(图15、S3422)。
能够利用信息获取部26c中具备的传感器中的例如内压传感器262来探测管头T内的压力变化。例如,在液体中含有气泡的情况下,与不存在气泡的情况相比管头T内的压力发生变化,因此通过探测内压的变化能够获取与液体中是否存在气泡有关的信息。另外,在抽吸或排出粘度高的液体的情况下,与抽吸或排出粘度低的液体相比,管头T内的压力的变化也不同。因此,通过探测管头T的内压的变化,还能够获取关于液体的粘度的信息。另外,还能够利用图像传感器263检测液体的浊度、液体的吸光度、液体的荧光强度、液体中是否混入异物。
并且,在液体处理系统D3中,利用具有导电性的材料来形成管头连接部25c的至少一部分,通过对管头T采用具有导电性的材料来使管头T作为电极发挥功能,由此还能够测定液体的温度、pH等。关于与液体有关的信息,能够将上述传感器检测到的值本身作为信息向机器人装置1c发送,但也能够在信息获取部26c中将检测值等变换为是否存在气泡、是否存在异物等其它信息之后向机器人装置1c发送。
在接收到信息的机器人装置1c中,利用分析部17分析与液体的状态有关的信息(图15、S3412)。分析部17既能够仅分析与液体的状态有关的信息中的例如浊度等一个项目的信息,另外也能够组合地分析浊度和温度等多个项目的信息。在分析部17进行的分析中能够使用公知的分析方法。另外,由分析部17进行的分析中使用的程序也可以保存于存储部16。
当分析部17的分析结束时,机器人装置1c向吸移管装置2c发送分析完成信号(图15、S3413),吸移管装置2c的控制部23使信息获取部26c停止(图15、S3423)。
在液体处理系统D3中,分析结果例如也能够预先保存于存储部16等,用户在适当的时间利用分析结果。另外,在由液体处理系统D3进行的液体的处理中,还能够通过在多个工序中多次嵌入与液体的状态有关的信息的获取工序S34来监视液体的状态,从而将各分析结果作为历史记录来保存。
并且,在液体处理系统D3中,还能够预先设定由机器人装置1c的控制部15执行的程序,使得与分析结果相应地变更机器人装置1c的动作。例如能够进行如下设定:在分析的结果是液体超过基准而判定为含有气泡的情况下,将抽吸到管头T内的液体废弃,再次进行液体的抽吸工序S33。另外,例如在所处理的多个液体试样中的某一试样中探测到异物的情况下,在与液体的状态有关的信息的获取工序S34的下一个工序以后变更液体处理系统D3的动作,使得将该试样从液体处理的对象中排除。
另外,在液体处理系统D3中,还能够通过利用由上述一种或多种传感器获取的与液体的状态有关的信息来探测由液体处理系统进行的液体的处理时发生的异常,使机器人装置1c执行错误处理的动作。图16是表示液体处理系统D3的错误处理方法的一例的流程图。参照图16来对错误处理方法进行说明。
如图16所示,首先,当在吸移管装置2c中探测到异常值时(图16、S4201),吸移管装置2c发送错误信号(图16、S4202)。另外,将与异常值有关的信息与该错误信号一起发送到机器人装置1c(图16、S4203)。与异常值有关的信息例如是指检测到异常值的项目及其值以及检测到异常值的时间点的吸移管装置2c的状态等。具体地说,例如是指液体的温度、浊度、pH、粘度等由上述各种传感器测定的项目及其值等。另外,能够通过将由上述各种传感器检测的值等与预先决定的基准进行比较来进行该异常值的探测。被发送到机器人装置1c的与异常值有关的信息例如也能够保存于存储部16。另外,在机器人装置1c中,也可以将与图16例示的错误处理动作有关的记录保存于存储部16等。
在接收到错误信号的机器人装置1c中,控制部15开始进行错误处理的动作(图16、S4101)。控制部15开始判定所接收到的与异常值有关的信息(图16、S4102)。在判定中,首先判定错误的严重度(图16、S4103)。例如,如果气泡的混入在基准内,则判定为错误轻微。另一方面,如果气泡的混入没有满足基准,则判定为错误严重。在判定为错误严重的情况下,机器人装置1c进行向用户通知异常的通知处理(图16、S4113),机器人装置1c成为待机状态(图16、S4114)。
在判定为错误轻微的情况下,机器人装置1c判定异常发生时的吸移管装置2c的状态(图16、S4104)。如果判定的结果是异常发生时而不是液体的处理时,则机器人装置1c使吸移管装置2c移动到液体废弃场所(图16、S4106)。另一方面,如果发生异常时的吸移管装置2c处于液体的处理过程中,则机器人装置1c判定所处理的液体是否为稀有液体(图16、S4105)。液体是否为稀有液体等的信息例如也可以保存于存储部16等。如果判定为所处理的液体是稀有液体,则机器人装置1c进行向用户通知异常的通知处理(图16、S4113),机器人装置1c成为待机状态(图16、S4114)。如果判定为液体不是稀有液体,则机器人装置1c使吸移管装置2c移动到液体废弃场所(图16、S4106)。
机器人装置1c在使吸移管装置2c移动到液体废弃场所时发送信号,以在吸移管装置2c中执行重复进行排出和抽吸来排出管头T内的液体的“净化”(图16、S4107)。吸移管装置2c在从机器人装置1c接收到信号时,对驱动部21进行驱动来进行净化(图16、S4204)。在进行了净化之后,吸移管装置2c判定净化是否完成(图16、S4205)。能够基于由信息获取部26c中具备的各种传感器探测的值等来判定净化是否完成。
在吸移管装置2c中,在控制部23判定为净化已完成的情况下,吸移管装置2c向机器人装置1c发送净化完成的信号(图16、S4206)。另一方面,在判定为净化没有完成的情况下,吸移管装置2c向机器人装置1c发送净化异常的信号(图16、S4207),吸移管装置2c成为待机状态(图16、S4208)。
机器人装置1c根据从吸移管装置2c发送的信号是净化完成信号还是净化异常信号来变更动作(图16、S4108)。在接收到净化异常信号的情况下,机器人装置1c进行向用户通知异常的通知处理(图16、S4113),机器人装置1c成为待机状态(图16、S4114)。在接收到净化完成信号的情况下,机器人装置1c进行将连接于管头连接部25c的管头T卸下的动作(图16、S4109),使吸移管装置2c返回到液体的处理动作开始时的位置(图16、S4110)。
机器人装置1c判定是否能够重新开始进行液体的处理动作(图16、S4111)。其结果,如果判定为能够重新开始,则机器人装置1c重新开始进行液体的处理动作(图16、S4112)。另一方面,如果判定为不能重新开始,则机器人装置1c进行向用户通知异常的通知处理(图16、S4113),机器人装置1c成为待机状态(图16、S4114)。
在上述错误处理方法中,以检测到液体的状态的异常的情况为例进行了说明,但吸移管装置2c也可以在由信息获取部26c例如探测到柱塞211的位置偏移、驱动部21的动作异常等的情况下,向机器人装置1c发送错误信号。另外,吸移管装置2c也可以将在信息获取部26c中获取到的驱动部21的异常动作的次数作为错误信息向机器人装置1c发送。在液体处理系统D3中,也能够预先对机器人装置1c和吸移管装置2c的动作进行编程,使得根据这些错误信号、错误信息来进行错误处理动作。
在上述本发明的第三实施方式所涉及的液体处理系统D3中,通过在信息获取部26c中具备多种传感器,能够获取与液体的状态有关的信息。另外,机器人装置1c也能够通过利用与液体的状态有关的信息来与吸移管装置2c协作地进行在液体的处理动作时产生的错误的处理。由于在使用了进行复杂的动作的机器人装置1c的液体的处理中提高试样等液体的处理精度,因此这种错误处理是有用的。本实施方式所涉及的液体处理系统D3的其它效果与上述第一实施方式所涉及的液体处理系统D1相同。
根据本技术,在对吸移管装置给予指示之后,即使是少量的液体,也能够立即大量且高速地进行高精度的吸移管操作。另外,通过利用无线,能够在远离人的场所进行吸移管操作,因此能够在恶劣环境下进行吸移管操作、危险的检体的处理。也能够使吸移管操作无人化。
本技术能够应用于容器的移动/开闭、检体/培养液等的搅拌等在研究室中进行的各种操作。另外,通过应用本技术,也能够有效利用以往处于研究室的各种装置。
D1、D11、D2、D3:液体处理系统;T:管头;1:机器人部;1a、1c:机器人装置;1b:控制盘;1d:通用计算机;11:臂部;111:爪部;112a、112b:关节;12:(机器人装置)接收部;13:(机器人装置)发送部;14:主体部;15:(机器人装置)控制部;16:存储部;17:分析部;18:输入部;19:显示部;2a、2b、2c、2d:吸移管装置;21:驱动部;211:柱塞;22:(吸移管装置)接收部;23:(吸移管装置)控制部;24a、24b、24c:外壳;25a、25c:管头连接部;26a、26b、26c:信息获取部;261:外压传感器;262:内压传感器;263:图像传感器;264:距离传感器;27:(吸移管装置)发送部;281:把持部;282:喷射器按钮;283:抽吸按钮;284:排出按钮;311:计量吸移管。
吸移管装置以及液体处理系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0