

IPC分类号 : F02M35/04,F04B25/00,F04B49/06,F04B49/22,F04B49/24






专利摘要
本发明涉及一种往复压缩机气量调节方法,基于气体回流的基本原理,提出了一种在盖侧缸缸头加装旁通管路实现气量无级调节的方法,通过控制缸头旁通管路通断实现气缸中特定气量气体在未压缩的低压状态下回流至进气管道中,只压缩所需要气量的气体,实现了气量的节能调节。该方法节能效果好,所需的调节装置结构简单,有效降低了一台往复压缩机增加无级气量调节装置的投入成本,并且简化了控制系统,为活塞式压缩机气量无级调节的节能改造提供了一种技术手段。
权利要求
1.一种缸头旁路回流的活塞压缩机气量无级调节方法,其特征在于包括以下
步骤:
1)本方法需要依靠一套调节装置,包括带回流孔的气缸盖侧缸盖、气体回流管路、设置在气体回流管路上的气开式开关阀或电开式开关阀、气压动力或电力单元、气体压力传感器、转速/相位传感器、信号采集变送单元和驱动控制器;
2)在每个气缸的缸头位置均用一条气体回流管路将该盖侧气缸与气缸的进气管线连接,在每个气体回流管路上加装气开式开关阀或电开式开关阀,用于控制气体管路的连通和切断,在没有动力作用时开关阀处于关闭状态,气体管路切断,当气压动力或电力单元作用时开关阀打开,气体管路连通;
3)在曲轴飞轮或联轴器位置设置一个转速/相位传感器,该传感器为非接触式感应式传感器,用于测量压缩机各列缸曲轴的转动相位角;
4)在曲轴飞轮或联轴器上标记绝对相位零点位置:以第一级的第一个气缸曲轴为基准参照,盘车转动曲轴,直到第一级的第一个气缸活塞到达气缸外止点位置,在飞轮或联轴器上正对着转速/相位传感器的位置做标记并粘贴感应块,每次第一级的第一个气缸活塞到达气缸外止点位置转速/相位传感器都会发送一个脉冲信号至控制器,记为绝对相位零点位置;
5)根据其他各列曲拐与第一级的第一个气缸曲拐的夹角确定每个缸活塞到达外止点即各个气缸的相对相位零点位置时的绝对相位角,设压缩机共有N个气缸,第i个气缸活塞到达外止点时的绝对相位角为θi;其中i=1~N;
6)当每个气缸的活塞从外止点向内止点运动时,盖侧缸气体分别经历膨胀过程和吸气阀打开后的吸气过程,在由外止点一直运动至内止点的过程中均保持缸头旁路开关阀常闭,缸头旁通管路处于切断状态;
7)当活塞开始反向运动,由内止点向外止点运动时控制系统输入控制信号至开关阀,驱动开关阀开启,在活塞的推动下气缸内气体由缸头旁通管路回流至进气管道中;
8)控制系统根据该气缸的进气压力和排气压力计算机组在设定负荷下所需要回流的气体体积大小Vr和开关阀关闭的绝对相位角度θ=θi+θB,其中θB为相对相位角度,其中0≤η≤1;并输出信号至开关阀,驱动开关阀关闭,在活塞推动下完成对剩余体积气体的压缩,实现压缩机气量的调节;设定负荷η下,根据压缩机参数和开关阀响应参数确定第i个气缸所需要回流的气体体积大小和控制器驱动开关阀关闭控制参数,具体的步骤如下:
首先,确定压缩机参数和该第i个气缸的参数,包括:压缩机工作转速n、该列气缸曲轴转动时相比于飞轮上初始标记的零相位位置转过的绝对相位角度θ、曲轴半径r、连杆长度l、曲柄连杆比 第i个气缸的余隙容积Vcle、第i个气缸的缸径Dcy、膨胀系数ne、该气缸吸气管道压力Ps、该气缸排气管道压力Pd;计算得到压缩机工作周期时长 活塞运动时候扫过瞬时容积 当θ=0°或360°时,Vswp=0;当θ=180°时,Vswp最大,
其次,确定设定负荷下气缸所需要回流的气体体积大小和开关阀关闭的相位:
I.根据压缩机该级气缸的进气压力值Ps和排气压力值Pd,计算膨胀过程体积Vexp,即 其中Vcle为第i个气缸的余隙容积、ne为膨胀系数;计算第i个气缸在Ps吸气压力下吸入的气体体积Vs:
II.设定负荷η下盖侧气缸实调负荷为η1=2η-1,在η1负荷下盖侧气缸需要排出的气体体积Vc:Vc=η1Vs=(2η-1)Vs,需要回流的气体体积Vr:
III.考虑余隙容积中的气体Vexp体积,得到在开关阀关闭的相位θ=θi+θB时,盖侧气缸的瞬时体积为 另一方面,根据活塞的瞬时位置计算盖侧气缸的瞬时体积为 结合以上两个公式得到 反解得到开关阀关闭的相位θ=θi+θB;
再次,确定控制盖侧气体旁路通断的开关阀的响应参数,包括:控制器输出开关阀开启信号到阀完全开启的时间T1、控制器输出开关阀关闭信号到阀完全关闭的时间T2;
最后,确定设定负荷下控制器驱动开关阀关闭控制参数:由以上计算得到开关阀开启相位为θi+180°,开关阀关闭相位为θi+θB;则控制器输出开关阀开启信号相位 控制器输出开关阀关闭信号相位
说明书
技术领域
本发明涉及一种活塞压缩机无级气量调节方法,通过让气缸中气体在未压缩的低压状态下回流至进气管道中,实现压缩机气量的无级调节,以使压缩机的排量适应后端工艺用气量的要求。同时多余气体的未压缩回流,节省了压缩多余气体浪费的能量,实现了压缩机节能高效运行。
背景技术
流程工业所用活塞压缩机是一种容积式压缩机,在确定的进气压力下其排气量由压缩机气缸的大小决定。工业现场一般是根据装置所需的最大容积流量来进行选择和设计压缩机气缸的大小,且都具有一定的富余量。当压缩机并入工艺流程中运行时,一方面由于上游工艺状态的波动或变化,使得压缩机入口气体状态 (入口压力、温度等)状态改变;或另一方面由于后端工艺用气量减小,都需要对压缩机的排气量进行调节,使得压缩机输送到后端工艺的气体流量减少或者压缩机从前端工艺吸入的气量流量减少,适应工艺流程的变化,保证管网压力的稳定。在实现压缩机排气流量或者吸气流量减少的同时,要求机组本身能够只压缩所需量的气体,避免压缩多余的气体造成能量的浪费,实现压缩机设备的节能高效运行。
目前能够节能高效地实现宽范围流量无级调节的方法主要有余隙调节和顶开进气阀控制气体回流调节两种。其中余隙调节通过改变压缩机盖侧缸的余隙容积大小,使得存入余隙腔中的高压气体增多,在压缩至同样压力情况下,膨胀过程中残留在余隙腔中的气体膨胀至进气压力的体积增大,机组实际吸入的气体体积和压缩后排出的气体减小,压缩机容积流量减小,同时压缩机指示功也随之减小。目前国内外已有多种余隙调节气量方法和装置。
西安交通大学提出了一种往复式压缩机余隙调节方法,见专利 CN100434695C,该方法通过十字头与活塞杆连接处的调整环之间形成的密封腔轴向尺寸的改变,调整处于止点位置时活塞与气缸盖壁面间的间隙,从而达到调节往复式压缩机余隙大小的目的。但该方法首先需要测量活塞端面与气缸盖壁面之间的间隙,需要在气缸内部预设传感器,由于气缸内压力温度高且通常都是危险介质,使得测量壁面间隙难度大、成本高;其次需要改造十字头与活塞杆的连接方式来调整两者之间的相对位置,十字头和活塞杆均为压缩机的运动部件,改造难度大、风险高。
另外一种余隙调节方法是采用在压缩机盖侧端增加一个可变容积的余隙腔,余隙腔内设有可调余隙活塞,通过外部动力单元精确控制可调余隙活塞的移动,从而实现压缩机盖侧缸不同的余隙容积大小,实现压缩机气量调节的调节。如专利US4775299、US6641371B2、CN201225264Y采用液压缸活塞与余隙活塞同轴连接,利用电液伺服控制的原理,控制液压力驱动液压缸活塞与余隙活塞的移动,但由于余隙缸活塞在发生位移时需要直接克服压缩机气缸内的气体推力,当采用液压驱动方式需要配备大型油站提供动力;另外,由于采用液压伺服控制,液压系统配置复杂、制造成本高且对油液的清洁度要求高,不利于操作和维护,以上缺点在一定程度上制约了液压力控制的余隙调节装置的应用。专利CN103291596A由步进电机和传动机构驱动实现调节活塞的轴向移动,实现压缩机余隙腔大小的改变;专利CN106286247A采用电控直驱伺服控制方案,通过伺服电机和直驱装置推动余隙缸活塞运动,采用步进/伺服电机直接驱动能够精确控制余隙缸活塞的位置,但对于活塞力较大的机组需要大功率的电机且必须满足防爆要求,使得这种余隙调节装置依然成本较高。
顶开进气阀控制气体回流调节方法通过在每个压缩机工作周期的部分行程中压开进气阀,多余气体经由进气阀回流来实现气量调节。如美国专利 US5833209、US7331767、中国专利CN103244399B中公开的调节装置通过高频快速响应开关阀或脉冲信号控制的电磁阀打开或切断液压动力回路,控制进气阀顶开机构动作,驱动进气阀延迟关闭,实现压缩机每周期排气量的调节;专利 CN102937084A、CN1987098A分别采用执行电机和步进电机驱动相应的传动部件,使吸气阀按照控制要求延时关闭,实现压缩机气量的自动无级调节。顶开进气阀控制气体回流调节方法能够实现0-100%全量程的气量调节,调节效果最优,但要实现压缩机每个周期中控制气阀的启闭,需要执行机构毫秒级的快速响应且要与压缩机转速相当的频率动作,一年的开关次数高达上亿次,对执行器的疲劳寿命要求极高,单个执行器成本高;另一方面,该调节方式下要在每个进气阀上加装执行器,需要的执行器数量多,这使得大型压缩机配套该调节装置的投入成本和维护成本很高。
发明内容
本发明基于气体回流的基本原理,提出了一种缸头旁路回流的压缩机气量无级调节方法,可通过在盖侧缸缸头加装可控旁路实现该侧缸气量的0~100%无级调节;气体在低压状态下实现旁路回流,实现了气量的节能调节。相比于进气阀回流调节,该方式由于没有多余气量反复进出进气阀,阻力损失小,能耗降低显著。采用该方法设计了一套往复压缩机无级气量调节装置,该调节装置的结构简单,成本低,为活塞式压缩机气量无级调节的节能改造提供了一种技术手段。
一种缸头旁路回流的活塞压缩机气量无级调节方法,其特征在于包括以下
步骤:
1)本方法需要依靠一套调节装置,包括带回流孔的气缸盖侧缸盖、气体回流管路、设置在气体回流管路上的气开式开关阀或电开式开关阀、气压动力或电力单元、气体压力传感器、转速/相位传感器、信号采集变送单元和驱动控制器;
2)在每个气缸的缸头位置均用一条气体回流管路将该盖侧气缸与气缸的进气管线连接,在每个气体回流管路上加装气开式开关阀或电开式开关阀,用于控制气体管路的连通和切断,在没有动力作用时开关阀处于关闭状态,气体管路切断,当气压动力或电力单元作用时开关阀打开,气体管路连通;
3)在曲轴飞轮或联轴器位置设置一个转速/相位传感器,该传感器为非接触式感应式传感器,用于测量压缩机各列缸曲轴的转动相位角;
4)在曲轴飞轮或联轴器上标记绝对相位零点位置:以第一级的第一个气缸曲轴为基准参照,盘车转动曲轴,直到第一级的第一个气缸活塞到达气缸外止点位置,在飞轮或联轴器上正对着转速/相位传感器的位置做标记并粘贴感应块,每次第一级的第一个气缸活塞到达气缸外止点位置转速/相位传感器都会发送一个脉冲信号至控制器,记为绝对相位零点位置;
5)根据其他各列曲拐与第一级的第一个气缸曲拐的夹角确定每个缸活塞到达外止点(各个气缸的相对相位零点位置)时的绝对相位角,设压缩机共有N 个气缸,第i(i=1~N)个气缸活塞到达外止点时的绝对相位角为θi;
6)当每个气缸的活塞从外止点向内止点运动时,盖侧缸气体分别经历膨胀过程和吸气阀打开后的吸气过程,在由外止点一直运动至内止点的过程中均保持缸头旁路开关阀常闭,缸头旁通管路处于切断状态;
7)当活塞开始反向运动,由内止点向外止点运动时控制系统输入控制信号至开关阀,驱动开关阀开启,在活塞的推动下气缸内气体由缸头旁通管路回流至进气管道中;
8)控制系统根据该气缸的进气压力和排气压力计算机组在设定负荷η (0≤η≤1)下所需要回流的气体体积大小Vr和开关阀关闭的绝对相位角度θ=θi+θB (θB为相对相位角度),并输出信号至开关阀,驱动开关阀关闭,在活塞推动下完成对剩余体积气体的压缩,实现压缩机气量的调节;设定负荷η下,根据压缩机参数和开关阀响应参数确定第i(i=1~N)个气缸所需要回流的气体体积大小和控制器驱动开关阀关闭控制参数,具体的步骤如下:
首先,确定压缩机参数和该第i个气缸的参数,包括:压缩机工作转速n、该列气缸曲轴转动时相比于飞轮上初始标记的零相位位置转过的绝对相位角度θ、曲轴半径r、连杆长度l、曲柄连杆比 第i个气缸的余隙容积Vcle、第i 个气缸的缸径Dcy、膨胀系数ne、该气缸吸气管道压力Ps、该气缸排气管道压力Pd;计算得到压缩机工作周期时长 活塞运动时候扫过瞬时容积 当θ=0°或360°时,Vswp=0;当θ=180°时, Vswp最大,
其次,确定设定负荷下气缸所需要回流的气体体积大小和开关阀关闭的相位:
I.根据压缩机该级气缸的进气压力值Ps和排气压力值Pd,计算膨胀过程体积Vexp,即 其中Vcle为第i个气缸的余隙容积、ne为膨胀系数;计算第i个气缸在Ps吸气压力下吸入的气体体积Vs:
II.设定负荷η下盖侧气缸实调负荷为η1=2η-1,在η1负荷下盖侧气缸需要排出的气体体积Vc:Vc=η1Vs=(2η-1)Vs,需要回流的气体体积Vr:
III.考虑余隙容积中的气体Vexp体积,得到在开关阀关闭的相位θ=θi+θB时,盖侧气缸的瞬时体积为 另一方面,根据活塞的瞬时位置计算盖侧气缸的瞬时体积为 结合以上两个公式得到 反解得到开关阀关闭的相位θ=θi+θB;
再次,确定控制盖侧气体旁路通断的开关阀的响应参数,包括:控制器输出开关阀开启信号到阀完全开启的时间T1、控制器输出开关阀关闭信号到阀完全关闭的时间T2;
最后,确定设定负荷下控制器驱动开关阀关闭控制参数:由以上计算得到开关阀开启相位为θi+180°,开关阀关闭相位为θi+θB;则控制器输出开关阀开启信号相位 控制器输出开关阀关闭信号相位
本发明涉及的往复压缩机无级气量调节方法通过灵活控制缸头回流旁路的通断时长,实现了压缩机气缸中多余气体的低压回流,实现了压缩机流量在较宽范围下的无级节能调节。相比于现有的余隙调节方式和顶开进气阀回流调节方式,该方法有效地简化了调节装置的结构,降低了成本,同时简化了控制算法。
附图说明
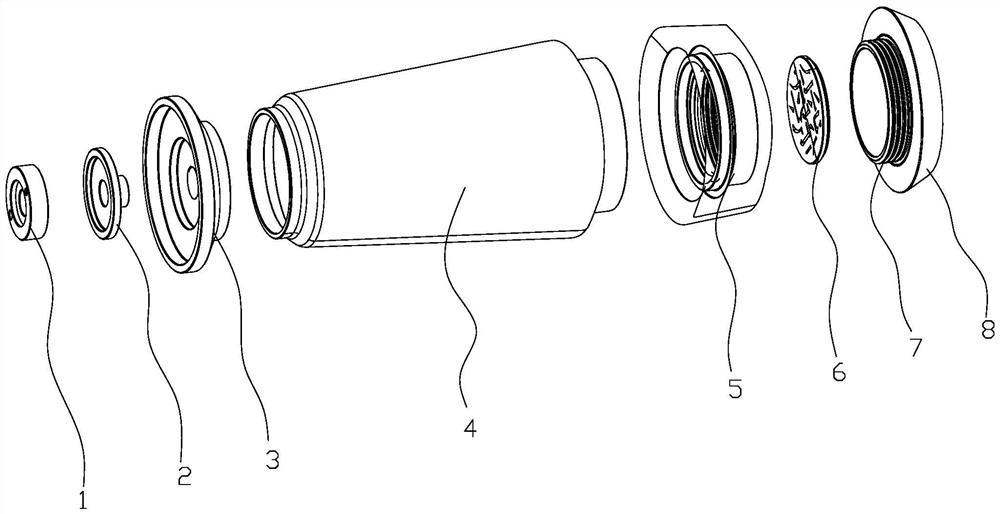
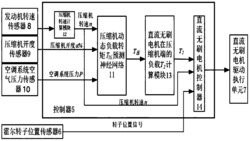
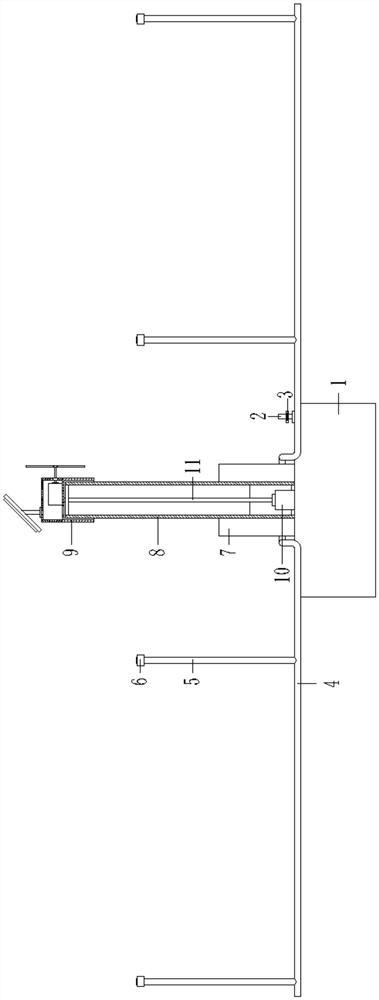
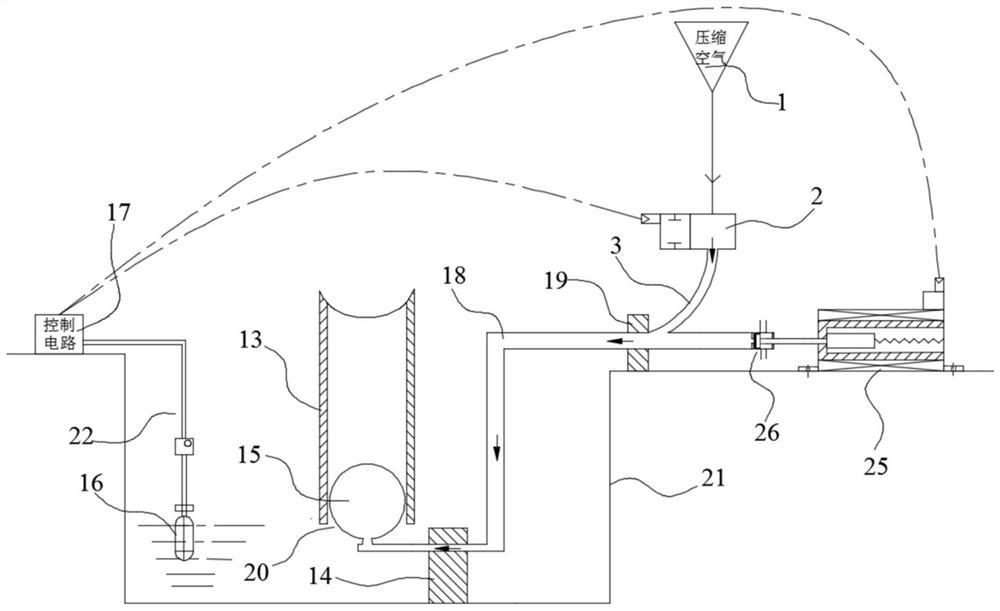
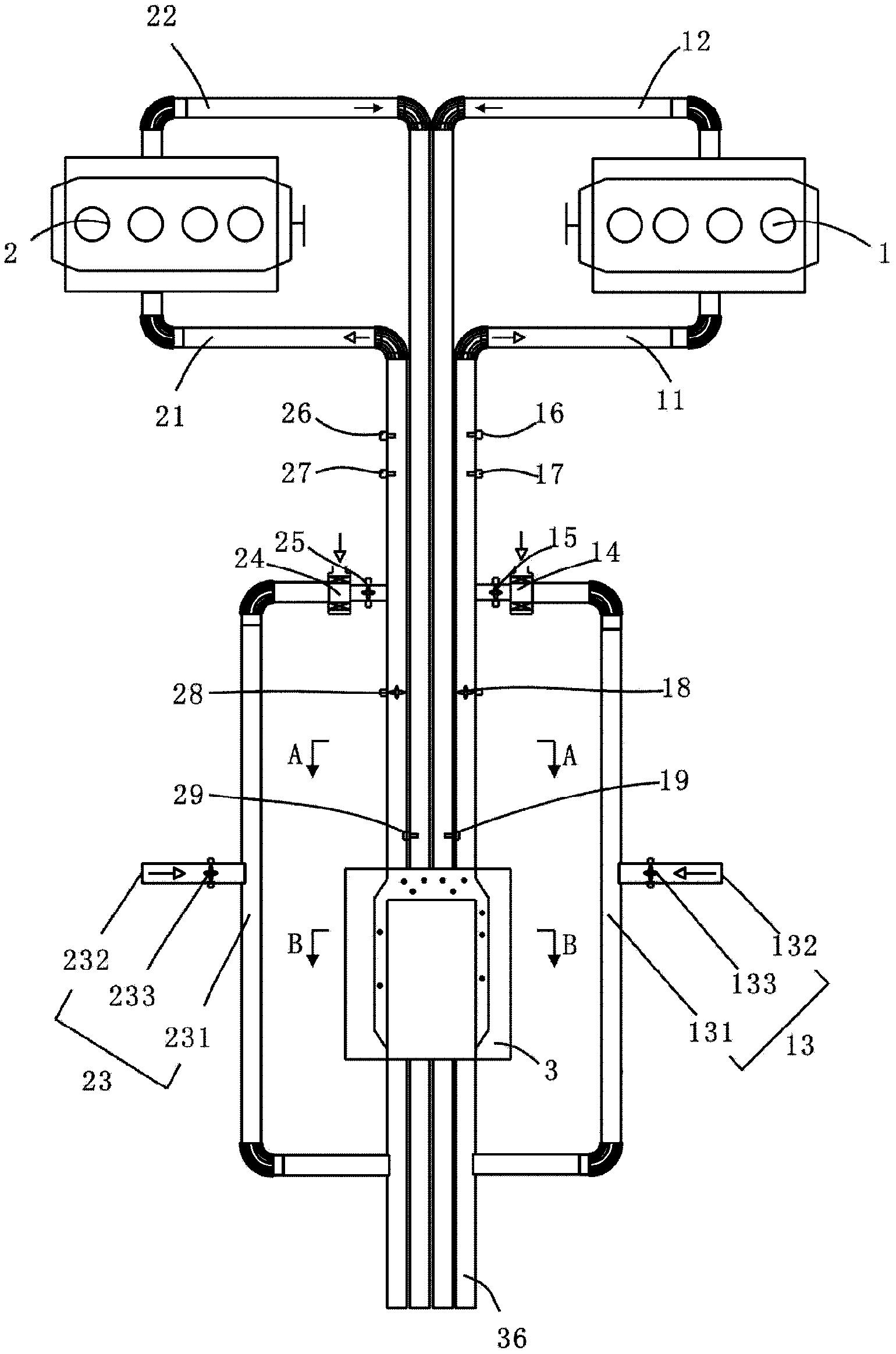
图1是本发明提出的盖侧缸旁路回流压缩机气量调节方法及装置组成示意图;
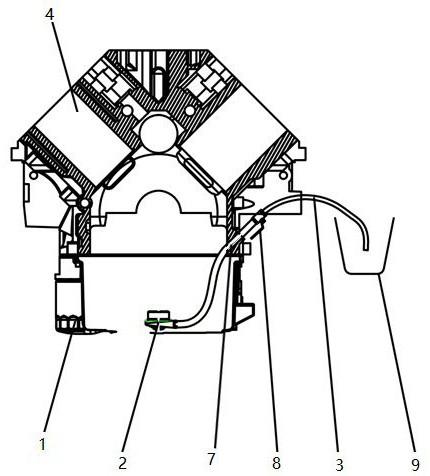
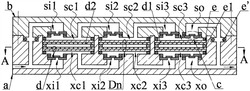
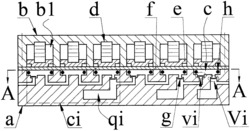
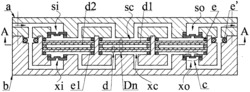
图2是本发明提出的盖侧旁路回流气量调节原理示意图,其中图2-1是盖侧气缸膨胀过程结束吸气过程开始时的活塞瞬时位置及各部件状态示意图;图2-2是活塞反向运动时缸头回流旁路连通气体开始回流示意图;图2-3是活塞运动至设定的位置时回流旁路切断气体开始压缩示意图;图2-4是气缸中设定气量气体被压缩至排气压力后由排气阀开始排出示意图;
图3是本发明提出的盖侧旁路回流气量调节方法在设定负荷下气缸所需要回流的气体体积大小和开关阀关闭的相位关系图;
图4是本发明方法在设定负荷下气缸所需要回流的气体体积大小和开关阀关闭的相位计算流程图;
图5是对于一台2D型压缩机本发明方法在设定负荷下气缸所需要回流的气体体积大小和开关阀关闭的相位;
图6是对于一台2D型压缩机本发明方法在不同设定负荷下的示功图:其中图6-a是100%负荷下轴侧和盖侧气缸的示功图;图6-b是80%负荷下轴侧和盖侧气缸的示功图;图6-c是70%负荷下轴侧和盖侧气缸的示功图;图6-d是60%负荷下轴侧和盖侧气缸的示功图;
具体实施方式
以下结合附图对本发明的原理和实施方式详细加以描述。
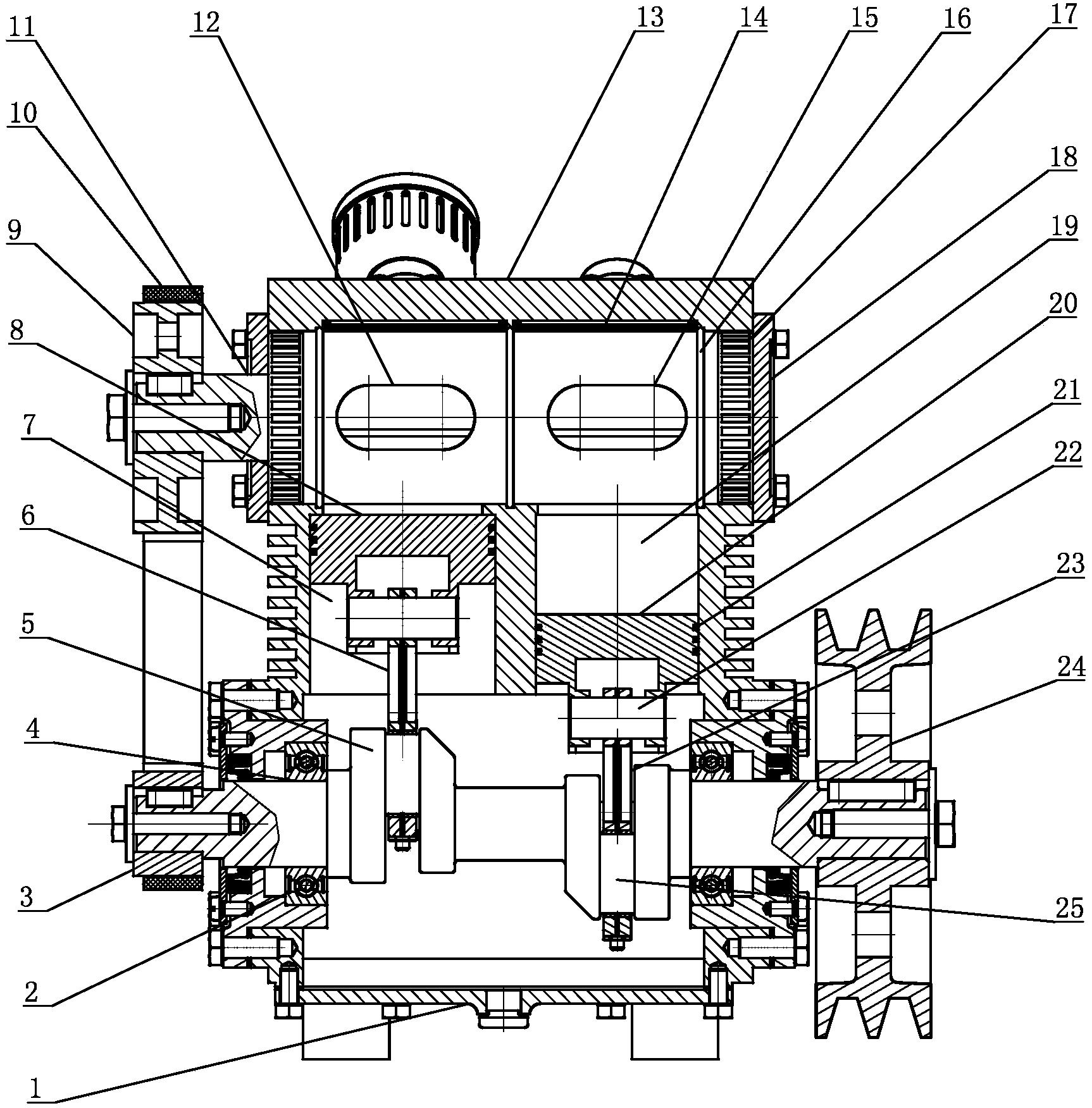
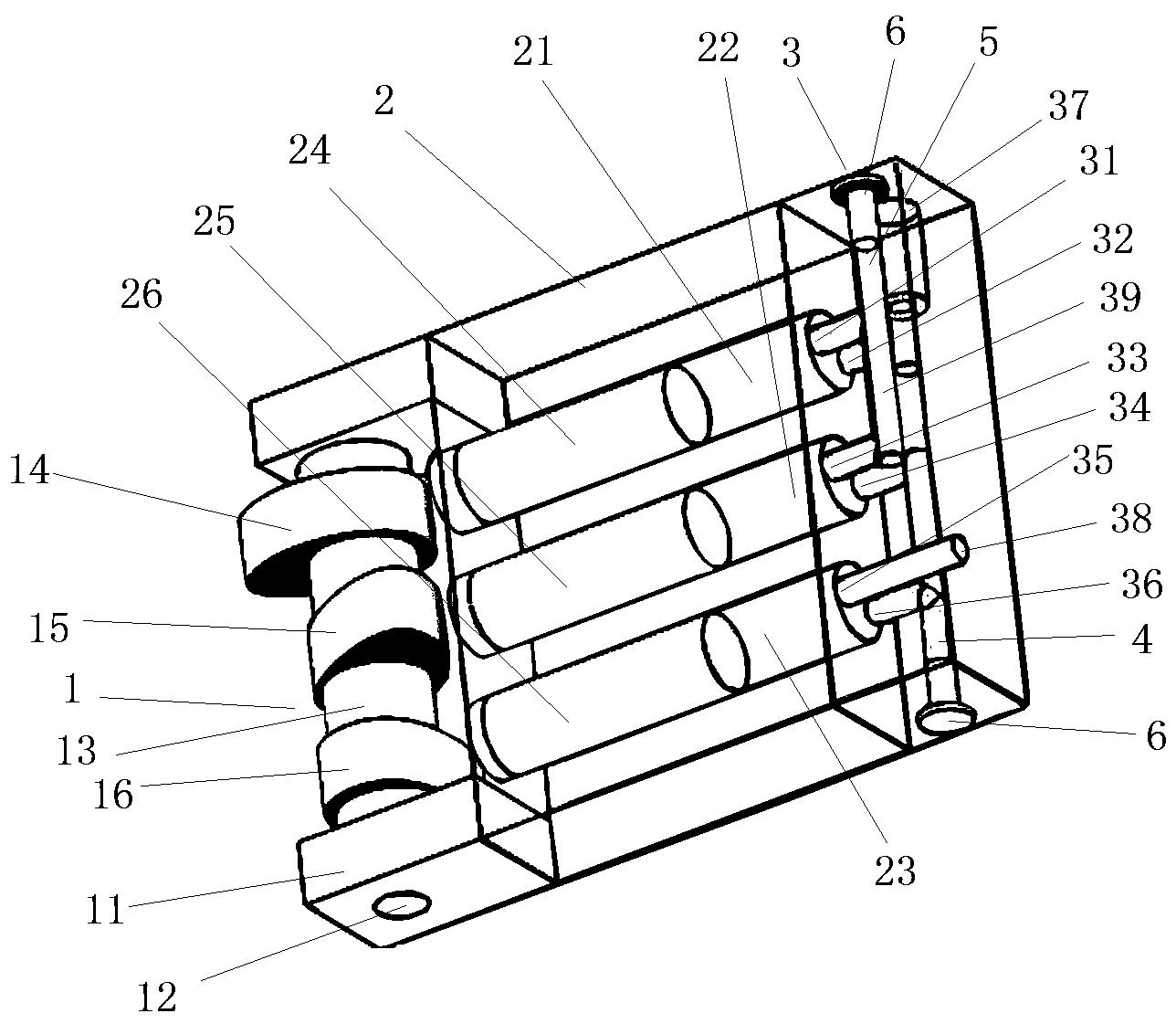
本发明的调节装置需要在压缩机各级气缸缸头加装旁路回流管路,该管路连接盖侧气缸和该气缸所在级的进气管路。在每个旁路回流管路上设置高频气开式开关阀或电开式开关阀控制回流管路的通断,参照附图1,开关阀由气压动力或电力单元驱动,在没有动力作用时开关阀处于关闭状态,气体管路切断,当气体动力或者电力作用时开关阀打开,气体管路连通。控制开关阀启闭的控制系统由 PLC控制器、信号采集变送单元、设置在飞轮上的转速/相位传感器、各级进气压力传感器、各级排气压力传感器组成。
本发明的调节方法在气缸活塞运动至特定位置连通或者切断缸头旁路回流管路,控制气缸中多余气体在低压状态下回流至进气管路,仅压缩和排出需要气量的气体。参照附图2-1,当气缸的活塞从外止点开始向内止点运动时,盖侧气缸余隙容积中残留的高压气体经历膨胀过程,膨胀过程中进排气阀全部关闭,膨胀过程从外止点(相对相位零点)持续至气缸压力等于进气管路压力(图中相位 A点);从A点开始,盖侧气缸进气阀开启,吸气过程开始并持续至外止点(180°相位点)结束,在由外止点一直运动至内止点的过程中均保持缸头旁路开关阀常闭,缸头旁通管路处于切断状态;参照附图2-2,当气缸的活塞从内止点开始反向运动时,控制系统输入控制信号至开关阀,驱动旁路回流管路开关阀打开,在活塞的推动下气缸内低压气体由缸头旁通管路回流至进气管道中;参照附图2-3,活塞运动至由设定气量确定的特定相位(图中相位B点)时控制系统输入控制信号至开关阀,驱动旁路回流管路开关阀关闭,低压气体回流过程结束;参照附图2-4,随着活塞的继续运动气缸中剩余的气体被压缩至排气压力后排气阀打开 (图中相位C点),单个压缩机工作周期中设定气量的气体排至排气管路中;每个压缩机工作周期中如此重复循环,实现了压缩机整体气量的调节。
本发明提出的盖侧旁路回流气量调节方法在设定负荷η下气缸所需要回流的气体体积大小Vr=(2-2η)Vs和开关阀关闭的相位θi+θB关系图参见附图3。回流的气体体积大小和开关阀关闭的相位计算流程图参见附图4。
[θi+0°,θi+θA]为膨胀过程,气体膨胀体积为Vexp;
[θi+θA,θi+180°]为吸气过程,吸入的气体体积为Vs;
[θi+180°,θi+θB]为回流过程,回流的气体体积为(2-2η)Vs;
[θi+θB,θi+0°]为排气过程,排气体积为Vc;
实施案例:
以一台工作转速为500r/min,额定吸气压力为0.1MPa,额定排气压力为 0.3MPa的2D型两列两缸往复压缩机为例。
压缩机工作转速为n=500r/min
气缸数N=2
各个气缸活塞到达外止点时的绝对相位角为θi=0°(i=1~2)
曲轴半径r=90mm
连杆长度l=450mm
曲柄连杆比λ=0.2
气缸余隙容积Vcle=1.26e06mm3
两个气缸的缸径均为Dcy=250mm
膨胀系数ne=1.4
计算得到压缩机工作周期时长
控制器输出开关阀开启信号到阀完全开启的时间T1=7ms
控制器输出开关阀关闭信号到阀完全关闭的时间T2=6ms
在设定负荷η(0≤η≤1)下气缸所需要回流的气体体积大小Vr=(2-2η)Vs和开关阀关闭的相位θB关系图参见附图5。,按照附图4的计算求解流程带入以上相关参数获得不同的设定气量负荷下控制器输出开关阀开启信号相位θv-ope、开关阀完全开启相位、控制器输出开关阀关闭信号相位θv-clo以及开关阀完全关闭相位θB,如下表所列:
采用本发明盖侧旁路回流的往复式压缩机无级气量调节方法及装置,调节机组不同气量负荷下的示功图如图6所示。设定的负荷越小,盖侧缸压缩过程滞后越多,回流过程持续时间越长,排出的高压气体体积相应越小;同时相比于满气量工况下的示功图,气量调节下的示功面积明显减小,且负荷越小示功图面积越小,说明负荷调节系统在每个循环周期中均实现了负荷的调节,每个压缩机周期中均只消耗压缩所需气体的功,该调节方法实现了气量的无级节能调节。
一种缸头气体管路回流的活塞压缩机气量无级调节方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0