








专利摘要
本实用新型属于智能监测技术领域,一种基于虚拟墙的30万吨级大型油轮靠泊监测装置。该装置主要安装在码头靠近靠泊边缘的中间位置,其应用对象是大型油轮,包括激光测距仪、工业摄像机、PLC控制器、电机驱动器、升降台以及PC机。本实用新型非接触感知技术与大型油码头靠泊工程实际相结合,以激光测距技术为主,结合空间平面解析方法,通过视觉伺服驱动升降台自适应调节高度,从而在油码头形成靠泊监测虚拟墙。本实用新型所提出的虚拟墙靠泊监测方法,不仅可以实时、动态、准确地汇报船体的靠泊速度,而且还可以将靠泊时船体相对于码头侧壁的两个姿态角度实时解析出来,从而达到靠泊预警的目的,大幅度提高了油码头运营管理的自动化水平。
权利要求
1.一种基于虚拟墙的30万吨级大型油轮靠泊监测装置,主要安装在码头靠近靠泊边缘的中间位置,其应用对象是大型油轮;该靠泊监测装置包括四台激光测距仪(3)、一台工业摄像机(4)、一台具有数据采集功能的PLC控制器(5)、一块电机驱动器(6)、一个升降台(7)以及一台PC机(8);其特征在于,
所述的四台激光测距仪(3)彼此平行放置且在空间形成一个矩形,矩形的大小根据现场的情况而定;该矩形所在平面即为“虚拟墙”,该“虚拟墙”垂直于水平面,其两条长边方向与靠泊码头线平行,两条短边方向垂直于水平面;一台工业摄像机(4)布置在四台激光测距仪(3)的中心位置,其光轴与激光测距仪发出的激光方向一致;激光测距仪(3)与工业摄像机(4)固定在垂直升降台(7)上;工业摄像机(4)与激光测距仪(3)均与PLC控制器(5)的数据采集、控制接口连接;PC机(8)与PLC控制器(5)相连,PLC控制器(5)与电机驱动器(6)相连;电机驱动器与电动升降台相连。
2.根据权利要求1所述的监测装置,其特征在于,根据船体长度的增加,在码头的多个位置布放基于虚拟墙的30万吨级大型油轮靠泊监测装置,从而实现多点联合监测。
说明书
技术领域
本实用新型属于智能监测技术领域,涉及到油码头大型油轮的靠泊监测问题,特别涉及到激光靠泊监测方法。
背景技术
船舶靠泊过程中运动信息的获取对于码头的安全防护十分重要,尤其是对于油码头而言,大型油轮的安全靠泊监测可降低码头损坏的风险。目前,在船舶靠泊监测方面,可以利用差分GPS定位原理在船舶左舷、船首或者船舶左右两舷放置一台定位终端负责采集船舶位置信息,并结合船长、船宽等船舶尺度信息,准确的计算出船舶靠泊速度、船舶首尾的离岸距离、船舶转向率等信息[1]。同样可以在码头上安装的二个平行且相距一定距离的激光探头,探测船舶上二点的离岸距离,然后根据一定时间间隔的不同距离,计算出靠泊速度,并根据两点的距离计算出船身与码头的夹角,利用计算机技术,监控船舶的靠泊速度,记录船舶靠泊码头的过程[2]。此外,使用扫描式激光测距的方式可解决点式激光监测方法寻找目标难的问题,通过分析船舶靠泊过程,建立基于三维激光点云数据的船舶靠泊数学模型,采用三维重建等方法,捕捉船舶运动形态,并提取船舶靠泊关键参数信息[3]。尽管在船舶靠泊监测方面已经取得了一定成果,然而对于诸如安全级别较高的30万吨级油码头靠泊监测而言,还存在靠泊姿态信息不全面、监测系统的自适应控制等方面均存在较大的问题。
本实用新型将激光测量技术与视觉技术相融合后,将以一种更加智能的方式对30万吨级油轮的靠泊状态进行监测,这种方式不仅大大地降低了码头撞损的风险,大大提高了油码头的安全控制能力。
参考文献:
[1]彭国均,刘洋,张杏谷,等.大型船舶辅助靠泊仪设计.交通运输工程学报,2012,12(6):48-54.
[2]柏杰.辅助靠系泊系统集成设计.中国水运,2011,11(9):61-62.
[3]闫晓飞,刘泽西,李颖,等.基于激光三维视觉的船舶靠泊动态监测技术.激光与红外,2016,46(12):1452-1458.
实用新型内容
针对30万吨级油码头的邮轮靠泊监测问题,本实用新型将激光测距技术与视觉伺服控制技术相结合,提出了一种基于虚拟墙的30万吨级大型油轮靠泊监测方法和装置。
本实用新型的技术方案:
一种基于虚拟墙的30万吨级大型油轮靠泊监测装置,主要安装在码头靠近靠泊边缘的中间位置,其应用对象是大型油轮;该靠泊监测装置包括四台激光测距仪3、一台工业摄像机4、一台具有数据采集功能的PLC控制器5、一块电机驱动器6、一个升降台7以及一台PC机8;
所述的四台激光测距仪3彼此平行放置且在空间形成一个矩形,矩形的大小根据现场的情况而定;该矩形所在平面即为“虚拟墙”,该“虚拟墙”垂直于水平面,其两条长边方向与靠泊码头线平行,两条短边方向垂直于水平面;一台工业摄像机4布置在四台激光测距仪3的中心位置,其光轴与激光测距仪发出的激光方向一致;激光测距仪3与工业摄像机4固定在垂直升降台7上;工业摄像机4与激光测距仪3均与PLC控制器5的数据采集、控制接口连接;PC机8与PLC控制器5相连,PLC控制器5与电机驱动器6相连;电机驱动器与电动升降台相连。
本实用新型的有益效果:大型油轮靠泊监测时充分考虑了油轮不允许第三方安装任何传感器设备的特殊要求,将非接触感知技术与大型油码头靠泊工程实际相结合,以激光测距技术为主,结合空间平面解析方法,通过视觉伺服驱动升降台自适应调节高度,从而在油码头形成靠泊监测虚拟墙。本实用新型所提出的虚拟墙靠泊监测方法,不仅可以实时、动态、准确地汇报船体的靠泊速度,而且还可以将靠泊时船体相对于码头侧壁的两个姿态角度实时解析出来,从而达到靠泊预警的目的,大幅度提高了油码头运营管理的自动化水平。
附图说明
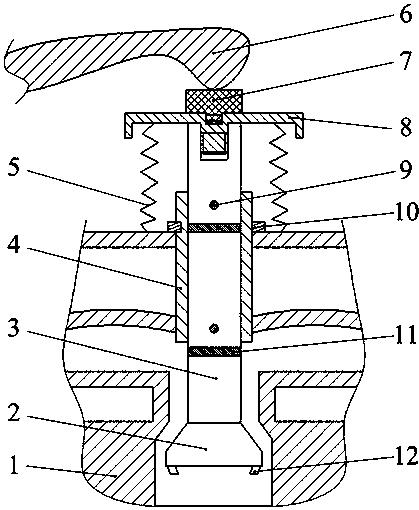
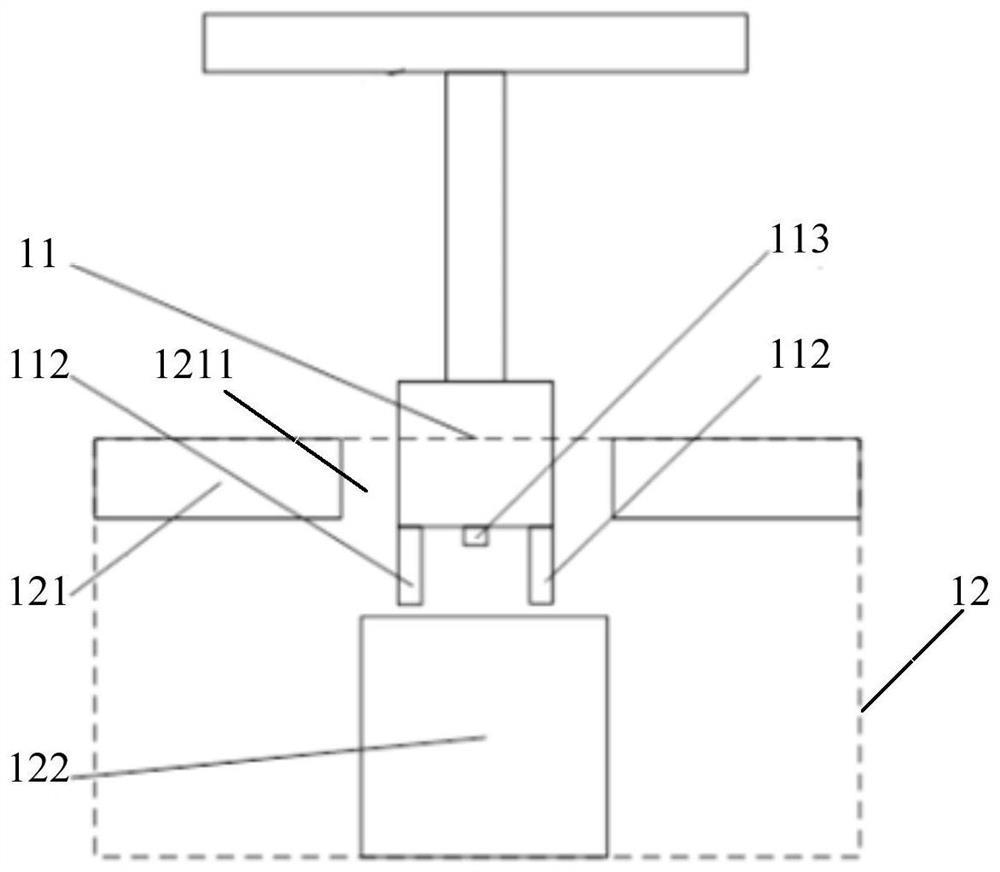
图1是基于虚拟墙的30万吨级大型油轮靠泊监测装置示意图。
图中:1码头;2油轮;3激光测距模块;4工业摄像机;5带有数据采集模块的PLC控制器;6驱动器;7升降台;8PC机。
具体实施方式
以下结合附图和技术方案,进一步说明本实用新型的具体实施方式。
一种基于虚拟墙的30万吨级大型油轮靠泊监测装置,主要安装在码头1靠近靠泊边缘的中间位置,其应用对象是30万吨级大型油轮2;该靠泊监测装置包括四台激光测距仪3、一台工业摄像机4、一台具有数据采集功能的PLC控制器5、一块电机驱动器6、一个升降台7以及一台PC机8;
所述的四台激光测距仪3彼此平行放置且在空间形成一个矩形,矩形的大小根据现场的情况而定(本案例中设置长边为2米,短边为1米);该矩形所在平面即为“虚拟墙”,该“虚拟墙”垂直于水平面,其两条长边方向与靠泊码头1线平行,两条短边方向垂直于水平面;一台工业摄像机4布置在四台激光测距仪3的中心位置,其光轴与激光测距仪3发出的激光方向一致;激光测距仪3与工业摄像机4固定在垂直升降台7上;工业摄像机4与激光测距仪3均与PLC控制器5的数据采集、控制接口连接;PC机8与PLC控制器5相连,PLC控制器5与电机驱动器6相连;电机驱动器与电动升降台相连。
具体步骤如下:
步骤A:所有设备上电完成后进入靠泊监测过程;工业摄像机4实时捕捉油轮1的靠泊图像,同时在PLC控制器5中使用图像边缘检测方法提取船侧涂漆部分的上沿线和下边缘线(一般油轮在船侧的上部分填涂黑色漆料,而在船体的中部这部分是一垂面),并计算这两条边缘线的中心线;
步骤B:根据步骤A中所得到的两条边缘线的中心线相对于工业摄像机4所采集靠泊图像中心的位置,通过PLC控制器5与电机驱动器6的通信进行升降台7的控制,使得图像中心落在中心线上;
步骤C:读取四台激光测距仪3的数值;此时根据四个激光测距仪3的位置定义测量坐标系:右下激光测距仪3的位置为坐标原点,右下激光测距仪3位置指向左下激光测距仪3位置方向为x轴向,右下激光测距仪3指向右上激光测距仪3位置方向为z轴向,而激光测距仪3发出激光的方向为y轴向。因此可以令右下、左下、左上和右上四个激光测距仪3的位置分别为P1(0,0,0)、P2(L,0,0)、P3(L,0,H)和P4(0,0,H),其中,L和H分别为四台激光测距仪3的水平距离和垂向距离(两个边长),则得到四个测距值yi,i=1,2,3,4形成的空间坐标P′1(0,y1,0)、P′2(L,y2,0)、P′3(L,y3,H)和P′4(0,y4,H);
步骤D:在PLC控制器5中基于最小二乘法对P′1、P′2、P′3和P′4四点所组成的平面进行拟合,并计算得到其法线以及其与x轴向和z轴向的夹角α和β;
步骤E:将数据采集的时间间隔与激光测距仪3的值的变化相对应,从而得到油轮靠泊的速度 其中vi,i=1,2,3,4为四个激光测距仪3测量所得到的速度(y轴向);
步骤F:将姿态角α和β以及速度v的变化动态显示在PC机8上,同时设定姿态角度阈值Th1和Th2以及速度阈值Tv,当α>Th1,β>Th2和v>Tv时进行报警。
尽管本实用新型所提出的装置可以独立完成监测任务,但随着船体长度的增加,可在码头的多个位置(尤其是码头两端)布放本实用新型的监测装置,从而实现多点联合监测。
一种基于虚拟墙的30万吨级大型油轮靠泊监测装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0