









专利摘要
一种聚碳酸酯光学球罩自动定位剪料装置,其要点在于它包括光学球罩固定装置、光学球罩校正装置、气动剪刀装置,光学球罩固定装置包括球罩固定底座、球罩固定盘、真空发生器、负压顶块和顶出气缸,球罩固定底座固定在球罩固定盘上,球罩固定盘通过分割器带动旋转。光学球罩校正装置包括手指气缸、滑动气缸、手指气缸固定座。手指气缸固定在滑动气缸上,由滑动气缸带动手指气缸前后移动。滑动气缸通过沉槽方式固定在手指气缸固定座上,手指气缸固定座固定在底板上。气动剪刀装置包括气动剪刀、气动剪刀固定座,气动剪刀固定在气动剪刀固定座上,气动剪刀固定座固定在底板上。本实用新型自动限位、自动剪切,剪切精度高,保证批量剪切的一致性。
权利要求
1.一种聚碳酸酯光学球罩自动定位剪料装置,其特征在于,它包括球罩固定底座(1)、负压顶块(2)、顶出气缸电磁阀(3)、 顶出气缸(4)、真空发生器电磁阀(5)、真空发生器(6)、滑动气缸A的电磁阀(7)、滑动气缸A(11)、手指气缸电磁阀(8)、手指气缸(13)、底板(9)、手指气缸固定座(10)、剪刀底座(14)、滑动气缸B的电磁阀(15)、滑动气缸B(16)、气动剪刀电磁阀(17)、气动剪刀(18)、球罩固定盘(19),顶出气缸(4)、剪刀底座(14)、手指气缸固定座(10)分别固定于底板(9)上,顶出气缸电磁阀(3)与顶出气缸(4)连接,负压顶块(2)固定在顶出气缸(4)上,球罩固定盘(19)位于负压顶块(2)上方,球罩固定盘(19)上加工与球罩固定底座下端面相配合的圆形凹槽(192),圆形凹槽(192)与真空发生器(6)通过吸附孔(191)相通,球罩固定底座(1)为圆环,固定在球罩固定盘(19)上,真空发生器电磁阀(5)、真空发生器(6)、负压顶块(2)依次连接;滑动气缸B的电磁阀(15)与滑动气缸B(16)连接,滑动气缸B(16)固定于剪刀底座(14),气缸头与气动剪刀(18)连接,推动气动剪刀(18)左右移动,气动剪刀电磁阀(17)与气动剪刀(18)连接;滑动气缸A的电磁阀(7)与滑动气缸A(11)连接,滑动气缸A(11)固定于手指气缸固定座(10),气缸头与手指气缸(13)连接,推动手指气缸(13)前后移动,手指气缸电磁阀(8)与手指气缸(13)连接。
2.根据权利要求1所述的一种聚碳酸酯光学球罩自动定位剪料装置,其特征在于,球罩固定盘(19)上有多个圆形凹槽(192),球罩固定盘(19)通过分割器(21)带动旋转。
3.根据权利要求2所述的一种聚碳酸酯光学球罩自动定位剪料装置,其特征在于,球罩固定盘(19)上有四个圆形凹槽(192)。
4.根据权利要求1所述的一种聚碳酸酯光学球罩自动定位剪料装置,其特征在于在底板(9)的剪刀底座(14)固定处的一侧边固定有限位块(12),限位块(12)上方固定有调节螺栓(121),对剪刀底座(14)进行一个方向上移动的微调。
5.根据权利要求1所述的一种聚碳酸酯光学球罩自动定位剪料装置,其特征在于底板上加工出用于限位手指气缸固定座(10)、剪刀底座(14)的限位凹槽,分别为第一限位凹槽、第二限位凹槽,用以保证几个部件相对位置的精度,各部件嵌于限位凹槽中,并用固定件固定。
6.根据权利要求5所述的一种聚碳酸酯光学球罩自动定位剪料装置,其特征在于手指气缸(13)轴向中心线与光学球罩料头的中心线重合。
7.根据权利要求6所述的一种聚碳酸酯光学球罩自动定位剪料装置,其特征在于气动剪刀(18)刀刃切口与光学球罩(20)料头的中心线垂直。
8.根据权利要求1所述的一种聚碳酸酯光学球罩自动定位剪料装置,其特征在于球罩固定底座下端有一与圆形凹槽(192)相配合的定位凸环,上端有与球罩法兰边相配合的凹圈。
说明书
技术领域
本实用新型属于光学球罩的剪料装置,尤其属于一种聚碳酸酯光学球罩自动定位剪料装置。
背景技术
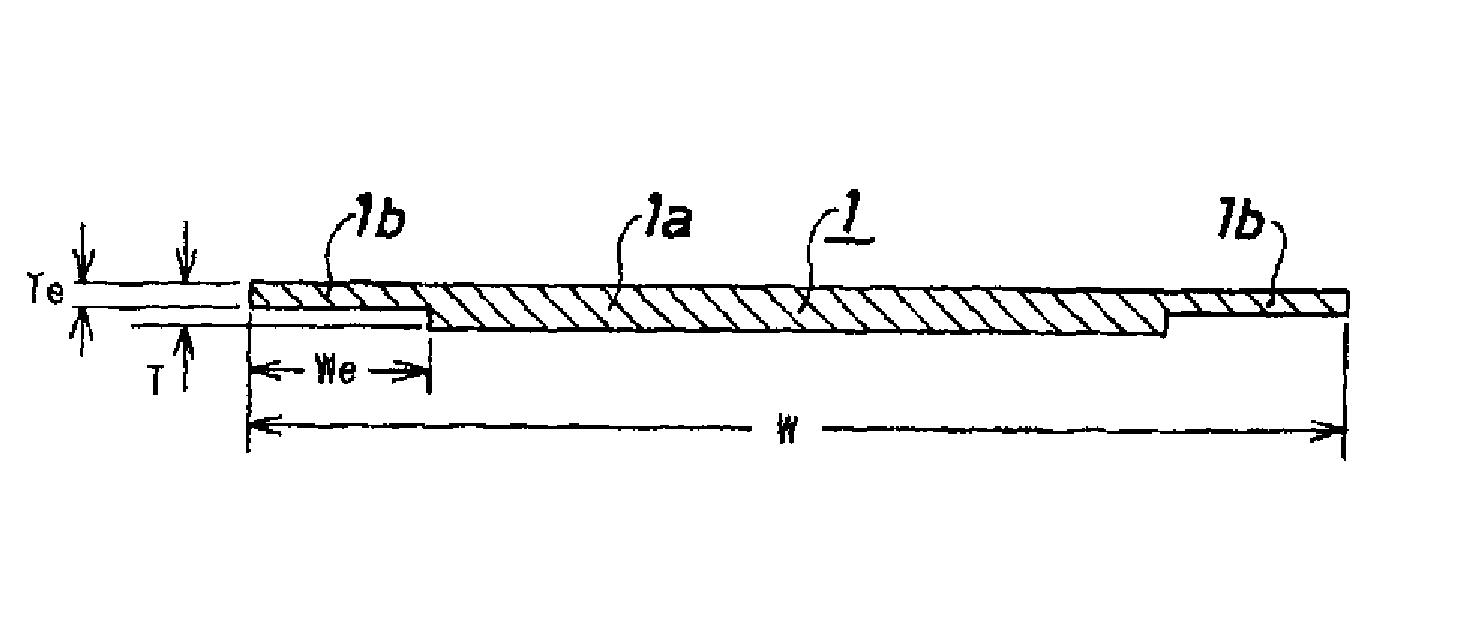
本实用新型所述的聚碳酸酯光学球罩为球形摄像机所使用的用于保护镜头和参与成像的半球形光学球罩,如图1所示的半球形光学球罩20。聚碳酸酯光学球罩是由塑料颗粒通过注塑机注塑成型,由于成型工艺的需要,在聚碳酸酯塑料成型模具上加工出用于熔融状态的聚碳酸酯材料流动的通道,该通道即为所说的料头201,当光学球罩注塑完成后,需对光学球罩料头201进行切除,避免影响装配。目前针对料头剪切一般采用人工一手夹持光学球罩、另一手持气动剪刀或者斜口钳的方式进行剪切;该方法随意性强,料头剪切程度不一,剪切效果不理想。本申请人也设计有简易的聚碳酸酯光学球罩定位剪料头装置,在使用过程中仍要用人工手夹持光学球罩,加工质量不稳定。
发明内容
本实用新型的目的在于提供一种聚碳酸酯光学球罩自动定位剪料装置,完成光学球罩定位、校正、料头剪切工序,保证批量生产时剪切的一致性。
本实用新型的技术方案为一种聚碳酸酯光学球罩自动定位剪料装置,其要点在于它包括球罩固定底座、负压顶块、顶出气缸电磁阀、 顶出气缸、真空发生器电磁阀、真空发生器、滑动气缸A的电磁阀、滑动气缸A、手指气缸电磁阀、手指气缸、底板、手指气缸固定座、剪刀底座、滑动气缸B的电磁阀、滑动气缸B、气动剪刀电磁阀、气动剪刀、球罩固定盘,顶出气缸、剪刀底座、手指气缸固定座分别固定于底板上,顶出气缸电磁阀与顶出气缸连接,负压顶块固定在顶出气缸上,球罩固定盘位于负压顶块上方,球罩固定盘上加工与球罩固定底座下端面相配合的圆形凹槽,圆形凹槽与真空发生器通过吸附孔相通,球罩固定底座为圆环,固定在球罩固定盘上,真空发生器电磁阀、真空发生器、负压顶块依次连接;滑动气缸B的电磁阀与滑动气缸B连接,滑动气缸B固定于剪刀底座气缸头与气动剪刀连接,推动气动剪刀左右移动,气动剪刀电磁阀与气动剪刀连接;滑动气缸A的电磁阀与滑动气缸A连接,滑动气缸A固定于手指气缸固定座,气缸头与手指气缸连接,推动手指气缸前后移动,手指气缸电磁阀与手指气缸连接。
本实用新型主要由三部分组成:剪刀及其固定部分、球罩固定部分、料头校正定位部分。球罩固定部分主要由球罩固定底座、球罩固定盘、负压顶块、顶出气缸电磁阀、顶出气缸、真空发生器电磁阀、真空发生器组成,此部分主要对球罩的固定的功能,剪刀及其固定部分主要由剪刀底座、滑动气缸B的电磁阀、滑动气缸B、气动剪刀电磁阀、气动剪刀组成,此部分实现了剪刀对料头剪切的功能,料头校正定位部分主要由滑动气缸A的电磁阀、手指气缸电磁阀、底板、手指气缸固定底座、滑动气缸A、手指气缸组成,此部分主要实现光学球罩料头位置校正、夹紧功能。负压顶块与真空发生器通过气管、快接气管接头连接。负压顶块与顶出气缸连接。顶出气缸的运动实现负压顶块上下移动功能,实现负压顶块与球罩固定盘连接。
滑动气缸A与手指气缸连接,实现手指气缸前后移动,手指气缸轴向中心线与气动剪刀刀刃垂直,从而保证光学球罩沿料头方向轴线与手指气缸轴向中心线平行。手指气缸夹紧料头,实现料头的定位和固定。
气动剪刀与滑动气缸B连接,实现气动剪刀左右移动。气动剪刀刀刃与手指气缸轴向中心线垂直。
球罩固定盘上有多个圆形凹槽,球罩固定盘通过分割器带动绕中心轴旋转。球罩固定盘上有四个圆形凹槽。每个圆形凹槽实现不同的工序,球罩放置、固定、剪切、取出。
在底板的剪刀底座固定处的一侧边固定有限位块,限位块上方固定有调节螺栓,对剪刀底座进行一个方向上移动的微调。限位块上锁两个螺丝,通过螺丝剪刀底座的前后位置调节。剪刀底座与底座锁附处采用U型槽。
球罩固定底座中间为通孔,与球罩固定盘吸附孔中心重合,气压通过此通孔进行抽负压。
底板上加工出手指气缸固定座、剪刀底座的限位凹槽。分别为第一限位凹槽、第二限位凹槽。用以保证几个部件相对位置的精度。
手指气缸轴向中心线与光学球罩料头的中心线重合。
球罩固定底座下端有一与圆形凹槽相配合的定位凸环,上端有与球罩法兰边相配合的凹圈。这样不同的球罩可以通过不同的球罩固定底座得以固定在球罩固定盘上。
本实用新型的优点:可有效的对光学球罩料头的剪切,料头剪切均匀准确,保证批量生产时剪切的一致性,实现了光学球罩料头剪切过程中自动限位、自动剪切,保证了料头剪切精度。
附图说明
图1光学球罩示意图
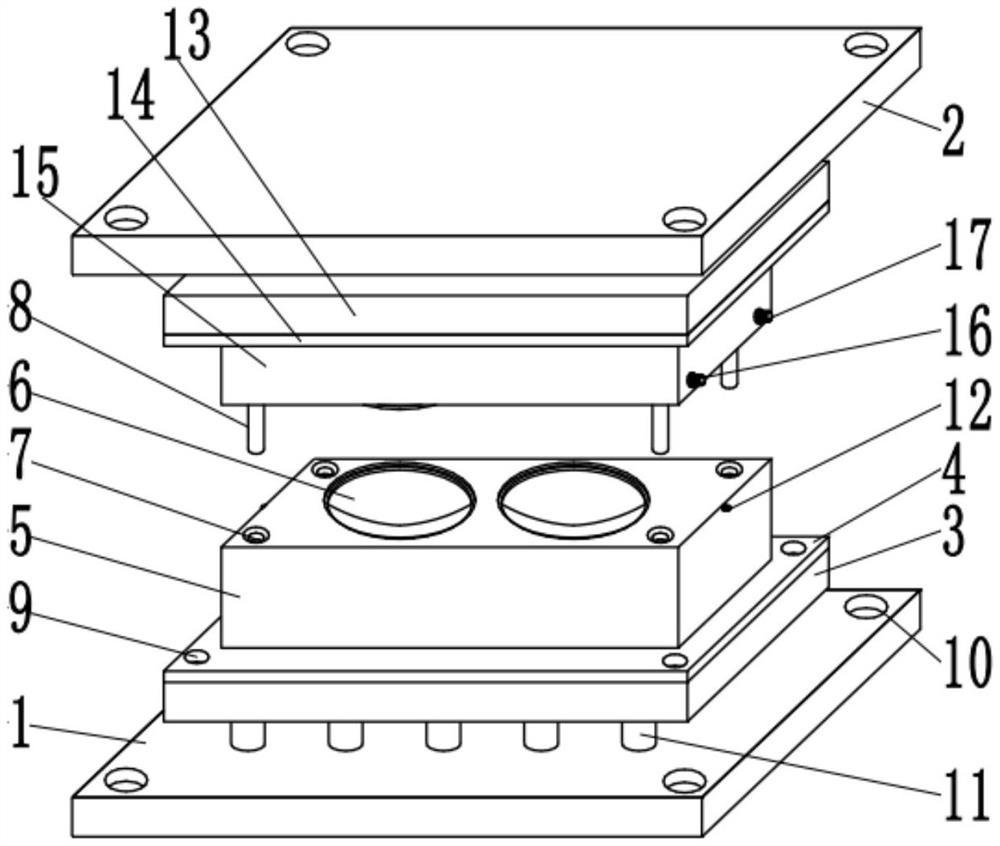
图2本实用新型的结构示意图
图3为气动剪刀刀刃切口与光学球罩的位置示意图
图4为球罩固定部分工作状态示意图
图5为球罩固定盘示意图
图6为图5的剖视图
图7为气动剪刀部分和手指气缸部分状态示意图
图8为底板的示意图
其中:1球罩固定底座111光学球罩固定底座直面112凹圈2 负压顶块 3 顶出气缸电磁阀4 顶出气缸5 真空发生器电磁阀 6 真空发生器 7滑动气缸A的电磁阀 8 手指气缸电磁阀 9 底板 91第一限位凹槽 92第二限位凹槽 10 手指气缸固定座 11滑动气缸A 12限位块 13手指气缸131手指气缸轴线14剪刀底座 15滑动气缸B的电磁阀 16滑动气缸B 17气动剪刀电磁阀 18气动剪刀181气动剪刀刀刃面19球罩固定盘191吸附孔192圆形凹槽20光学球罩201光学球罩料头21分割器。
具体实施方式
下面的实施例可以使本专业的技术人员更理解本实用新型,对下述的实施例进行修改,添加和替换都是可能的,都没有超出本实用新型的保护范围。
如图2所示,一种实现如图1所示的光学球罩自动定位剪料装置,目的在于对光学球罩料头201进行切除,它包括球罩固定装置、气动剪刀装置和光学球罩校正装置,剪刀及其固定部分主要由剪刀底座14、滑动气缸B的电磁阀15、滑动气缸B16、气动剪刀电磁阀17、气动剪刀18组成,此部分实现了剪刀对料头剪切的功能,料头校正定位部分主要由滑动气缸A的电磁阀7、手指气缸电磁阀8、底板9、手指气缸固定底座10、滑动气缸A11、手指气缸13组成,此部分主要实现光学球罩料头位置校正、夹紧功能。负压顶块与真空发生器通过气管、快接气管接头连接。负压顶块与顶出气缸连接。顶出气缸的运动实现负压顶块上下移动功能,实现负压顶块与球罩固定盘连接。
顶出气缸4、剪刀底座14、手指气缸固定座10分别固定于底板9上,顶出气缸电磁阀3与顶出气缸4连接,负压顶块2固定在顶出气缸4上,球罩固定盘19位于负压顶块2上方,球罩固定盘19上加工与球罩固定底座下端面相配合的圆形凹槽192,球罩固定底座1为圆环,固定在球罩固定盘19上,球罩固定底座下端有一与圆形凹槽192相配合的台阶柱或定位凸环,上端有与球罩法兰边相配合的凹圈112,这不同的球罩可以通过不同的球罩固定底座得以固定在球罩固定盘上。圆形凹槽192与真空发生器6通过吸附孔191相通,真空发生器电磁阀5、真空发生器6、负压顶块2依次连接;滑动气缸B的电磁阀15与滑动气缸B16连接,滑动气缸B16固定于剪刀底座14,气缸头与气动剪刀18连接,推动气动剪刀18左右移动,气动剪刀电磁阀17与气动剪刀18连接;滑动气缸A的电磁阀7与滑动气缸A11连接,滑动气缸A11固定于手指气缸固定座10,气缸头与手指气缸13连接,推动手指气缸13前后移动,手指气缸电磁阀8与手指气缸13连接。
球罩固定部分主要由球罩固定底座1、球罩固定盘19、负压顶块2、顶出气缸电磁阀3、顶出气缸4、真空发生器电磁阀5、真空发生器6、分割器21组成,此部分主要对球罩的固定的功能,负压顶块2锁附在顶出气缸4上,真空发生器6和负压顶块通过气管和气管接头连接,分割器21带动球罩固定盘19转动,气动剪刀装置包括气动剪刀18、滑动气缸B 16、剪刀固定座14和限位块12,剪刀固定座14固定在底板上,限位块12固定在底板侧边。光学球罩校正装置包括手指气缸8、滑动气缸A 11和手指气缸固定座10。
球罩固定盘19采用金属加工而成,在球罩固定盘19上,一次性加工四个圆形凹槽192,圆形凹槽深度3-5mm,球罩固定底座下端有一与圆形凹槽192相配合的台阶柱,放入圆形凹槽192中,球罩固定底座1通过螺栓固定在球罩固定盘19上,以保证4个球罩固定底座1相对位置的精度,光学球罩20放置球罩固定底座1上。球罩固定底座1加工出可容下球罩法兰边外延的圆形凹圈112,在光学球罩料头201的对应处为光学球罩固定底座直面111,如图3所示。光学球罩固定底座直面111与手指气缸轴线131要保持垂直状态,气动剪刀刀刃面181与光学球罩固定底座直面111保持平行状态。制作不同球罩固定底座1与不同大小的光学球罩相配合。通过更换不同的球罩固定底座1,可实现不同规格的球罩的剪切。
底板9采用金属加工而成,底板上加工出手指气缸固定座、剪刀底座的限位凹槽。分别为第一限位凹槽91、第二限位凹槽92。各部件通过螺栓固定在底板9上的限位凹槽中,以保证几个部件的相对位置的精度。手指气缸固定座10、剪刀固定座14在朝光学球罩方向上的位置可调。
顶出气缸4、真空发生器6、手指气缸8、滑动气缸A 11、滑动气缸B15、气动剪刀18各通过外接一个电磁阀,控制其开闭状态。
每个电磁阀的动作顺序通过PLC程序控制,使用过程中光学球罩20放置在光学球罩固定底座1后,分割器21带动球罩固定盘19旋转90°,旋转到位后,滑动气缸A电磁阀7通电打开,滑动气缸A 7开始动作,动作到位后,手指气缸电磁阀8通电,手指气缸13动作夹紧光学球罩料头201。顶出气缸电磁阀3通电,顶出气缸4动作。顶出气缸4动作完成后,真空发生器电磁阀5得电,真空发生器开始工作,此时光学球罩内部为抽真空状态。滑动气缸B电磁阀15通电打开,气动剪刀18随滑动气缸B16移动并到位后,气动剪刀电磁阀17通电,通入气体,气动剪刀18动作,将料头剪切去除。
球罩放入球罩固定底座1的凹圈112内,分割器带动球罩固定盘19转动90°,机构自动完成以上剪料头步骤。剪料完成后,分割器带动球罩固定盘19转动。
一种聚碳酸酯光学球罩自动定位剪料装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0