







专利摘要
本发明涉及的是一种基于自动监测控制技术的钻井平台推进器辅助锚泊定位系统。本发明涉及的基于自动监测控制技术的推进器辅助锚泊定位系统包括钻井平台2、传感器系统3、锚泊系统4、风力补偿器9、观测器10、锚泊监测系统11、控制器13、推进系统14传感器系统3包括张力传感器5、罗经6、GPS7和风传感器8。通过实时监测锚泊系统锚链的张力状态,进行控制器使能决策;当海洋环境恶劣导致锚链张力超过设定阈值并持续一定时间时,令控制器参与到钻井平台的定位控制,以降低锚泊系统锚链张力,防止其由于张力过大而断裂,实现推进器辅助锚泊定位功能,从而增强钻井平台对海洋环境的适应性。
权利要求
1.一种基于自动监测控制技术的钻井平台推进器辅助锚泊定位系统,其特征是:
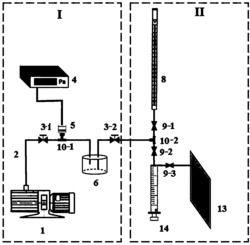
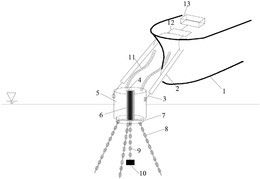
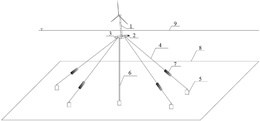
1)本发明涉及的基于自动监测控制技术的推进器辅助锚泊定位系统包括钻井平台(2)、传感器系统(3)、锚泊系统(4)、风力补偿器(9)、观测器(10)、锚泊监测系统(11)、控制器(13)、推进系统(14);传感器系统(3)包括张力传感器(5)、罗经(6)、GPS(7)和风传感器(8);钻井平台(2)在工作过程中受环境干扰(1)造成的海洋环境干扰力、推进系统(14)提供的推力和锚泊系统(4)提供的锚泊力三种力,其中海洋环境干扰力包括高频海浪干扰力τH、风力τW以及慢变力τL;慢变力τL包括海流作用力、低频海浪干扰力以及未建模动态;锚泊系统(4)根据锚索的长度计算出锚链在水流、波浪影响下的张力大小;推进系统(11)包括钻井平台(2)上配置的推进器,它根据控制器给出的各个推进器的转速和方向角,产生钻井平台在三个自由度上所受到的推力估计值
2)传感器系统(3)分为张力传感器(5)、罗经(6)、GPS(7)和风传感器(8),张力传感器将测量得到的锚链张力传递给锚泊监测系统(11);风传感器将测量得到的相对风速和相对风向角信息实时传递给风力补偿器(9),罗经和GPS将测量得到的船舶位置和艏向信息传递给观测器(10);
3)风力补偿器(9)接收风传感器测量得到的相对风速和相对风向角信息,并根据钻井平台(2)的主尺度信息计算得到船舶在三个自由度上所受到的风力估计值 并将其传递给观测器(10)。
2.根据权利要求1所述的一种基于自动监测控制技术的钻井平台推进器辅助锚泊定位系统,其特征在于:锚泊监测系统根据张力传感器提供的锚链张力信息,对锚泊系统锚链的张力进行估计,并将其传递给观测器(10);同时,当锚链张力的估计值大于锚链张力设定的阈值且持续一定时间时,将控制器使能信息置为“真”,否则为“假”。
3.根据权利要求1所述的一种基于自动监测控制技术的钻井平台推进器辅助锚泊定位系统,其特征在于:所述的锚链张力由下式计算得到:
4.根据权利要求1所述的一种基于自动监测控制技术的钻井平台推进器辅助锚泊定位系统,其特征在于:所述的观测器计算得到估计的平台位置、速度、艏向、回转率和低频干扰力通过下式获得:
5.根据权利要求1所述的一种基于自动监测控制技术的钻井平台推进器辅助锚泊定位系统,其特征在于:控制器(8)同时接收观测器输出的平台位置和艏向、速度及低频干扰信息,锚泊监测系统输出的锚泊力估计值和控制器使能信息;当使能信息为“真”时控制器投入使用,进行推力分配优化工作,令推进系统参与定位控制以降低锚泊系统锚链张力,实现推进器辅助锚泊定位功能;当使能信息为“假”时控制器并不投入使用,推进系统不参与定位控制,平台完全依靠锚泊系统进行定位。
6.根据权利要求1所述的一种基于自动监测控制技术的钻井平台推进器辅助锚泊定位系统,其特征在于:所述的推力分配优化工作由下式进行,最终得到钻井平台各个推进器所需的转速和方位角:
说明书
技术领域
本发明涉及的是一种基于自动监测控制技术的钻井平台推进器辅助锚泊定位系统。
背景技术
目前国内外海洋石油的开发日益趋向深海领域,为了满足其在深海恶劣环境条件下进行工程作业的需求,深海钻井平台必须长期系泊于特定的海域中,并且在遇到恶劣风浪时也不可以避航,因此这对平台的定位系统提出了巨大挑战。近年来,出现了动力定位系统,并得到迅速发展,但其初始投资和运营成本都比较高。所以深海钻井平台锚泊系统的研究还具有重要的意义和研究价值。
国内对于推进器辅助的锚泊系统的研究还比较少,多数此类的文章见诸于国外某几个大学及科研机构,如挪威科技大学等。经文献检索发现,文献名称:推进器辅助系泊定位技术研究,此方法以FPSOFloatingProduction,StorageandOffloadingSystem)为研究对象,对海洋环境和系泊系统进行了建模并对控制器和观测器进行了研究,但并未对控制器的使能决策进行分析,本发明以钻井平台为研究对象,采用无源状态观测器对钻井平台的位置和艏向、速度、低频干扰力进行估计,同时设计了基于自动监督控制技术的锚泊监测系统对锚链张力进行实时监测与分析,并对控制器使能信息进行决策,判断是否令控制器参与定位控制。
发明内容
本发明的目的在于针对钻井平台的锚泊定位系统,提供一种在海洋环境恶劣时自动进行推进器辅助的基于自动监测控制技术的钻井平台推进器辅助锚泊定位系统。
本发明的目的是这样实现的:
一种基于自动监测控制技术的钻井平台的推进器辅助锚泊定位系统:
1本发明涉及的基于自动监测控制技术的推进器辅助锚泊定位系统包括钻井平台2、传感器系统3、锚泊系统4、风力补偿器9、观测器10、锚泊监测系统11、控制器13、推进系统14。传感器系统3包括张力传感器5、罗经6、GPS7和风传感器8;钻井平台2在工作过程中受环境干扰1造成的海洋环境干扰力、推进系统14提供的推力和锚泊系统4提供的锚泊力三种力,其中海洋环境干扰力包括高频海浪干扰力τH、风力τW以及慢变力τL。慢变力τL包括海流作用力、低频海浪干扰力以及未建模动态;锚泊系统4根据锚索的长度计算出锚链在水流、波浪影响下的张力大小;推进系统11包括钻井平台2上配置的推进器,它根据控制器给出的各个推进器的转速和方向角,产生钻井平台在三个自由度上所受到的推力估计值
2传感器系统3分为张力传感器5、罗经6、GPS7和风传感器8,张力传感器将测量得到的锚链张力传递给锚泊监测系统11;风传感器将测量得到的相对风速和相对风向角信息实时传递给风力补偿器9,罗经和GPS将测量得到的船舶位置和艏向信息传递给观测器10。
3风力补偿器9接收风传感器测量得到的相对风速和相对风向角信息,并根据钻井平台2的主尺度信息计算得到船舶在三个自由度上所受到的风力估计值 并将其传递给观测器10。
锚泊监测系统根据张力传感器提供的锚链张力信息,对锚泊系统锚链的张力进行估计,并将其传递给观测器10;同时,当锚链张力的估计值大于锚链张力设定的阈值且持续一定时间时,将控制器使能信息置为“真”,否则为“假”。
所述的锚链张力由下式计算得到:
所述的观测器计算得到估计的平台位置、速度、艏向、回转率和低频干扰力通过下式获得:
控制器8同时接收观测器输出的平台位置和艏向、速度及低频干扰信息,锚泊监测系统输出的锚泊力估计值和控制器使能信息。当使能信息为“真”时控制器投入使用,进行推力分配优化工作,令推进系统参与定位控制以降低锚泊系统锚链张力,实现推进器辅助锚泊定位功能;当使能信息为“假”时控制器并不投入使用,推进系统不参与定位控制,平台完全依靠锚泊系统进行定位。
所述的推力分配优化工作由下式进行,最终得到钻井平台各个推进器所需的转速和方位角:
本发明的有益效果在于:通过实时监测锚泊系统锚链的张力状态,进行控制器使能决策;当海洋环境恶劣导致锚链张力超过设定阈值并持续一定时间时,令控制器参与到钻井平台的定位控制,以降低锚泊系统锚链张力,防止其由于张力过大而断裂,实现推进器辅助锚泊定位功能,从而增强钻井平台对海洋环境的适应性。
附图说明
图1基于自动监测控制技术的钻井平台推进器辅助锚泊定位系统总体结构图;
图2锚泊监测系统结构框图。
具体实施方式
下面结合附图对本发明做进一步描述。
本发明涉及的基于自动监测控制技术的推进器辅助锚泊定位系统包括钻井平台2、传感器系统3、锚泊系统4、风力补偿器9、观测器10、锚泊监测系统11、控制器13、推进系统14。传感器系统3包括张力传感器5、罗经6、GPS7和风传感器8。本发明包括了一个锚泊监测系统,锚泊监测系统根据张力传感器提供的锚链张力信息,对锚泊系统锚链的张力进行估计,并将其传递给观测器;同时,当锚链张力的估计值大于锚链张力设定的阈值且持续一定时间时,将控制器使能信息置为“真”,否则为“假”。控制器同时接收观测器输出的平台位置和艏向、速度及低频干扰信息,锚泊监测系统输出的锚泊力估计值和控制器使能信息。当使能信息为“真”时控制器投入使用,推进系统参与定位控制以降低锚泊系统锚链张力,实现推进器辅助锚泊定位功能;当使能信息为“假”时控制器并不投入使用,推进系统不参与定位控制,平台完全依靠锚泊系统进行定位。
如图1所示,本发明涉及的推进器辅助锚泊定位系统包括钻井平台2、传感器系统3、锚泊系统4、风力补偿器9、观测器10、锚泊监测系统11、控制器13、推进系统14。传感器系统3包括张力传感器5、罗经6、GPS7和风传感器8;钻井平台2在工作过程中受环境干扰1造成的海洋环境干扰力、推进系统14提供的推力和锚泊系统4提供的锚泊力三种力,其中海洋环境干扰力包括高频海浪干扰力τH、风力τW以及慢变力τL。慢变力τL包括海流作用力、低频海浪干扰力以及未建模动态;锚泊系统4根据锚索的长度计算出锚链在水流、波浪影响下的张力大小;推进系统11包括钻井平台2上配置的推进器,它根据控制器给出的各个推进器的转速和方向角,产生钻井平台在三个自由度上所受到的推力估计值
2传感器系统3包括张力传感器5、罗经6、GPS7和风传感器8,张力传感器将测量得到的锚链张力传递给锚泊监测系统11;风传感器将测量得到的相对风速和相对风向角信息实时传递给风力补偿器9;罗经和GPS将测量得到的船舶位置/艏向信息 传递给观测器10。
风力补偿器需要预设钻井平台的主尺度信息,包括船舶总长L、船舶水线以上正投影面积Af和侧投影面积As,以及船舶水线以上侧投影面积的周长c。风力补偿器包括了一套风力计算方法,它接收风传感器数据,根据实时风向和风速信息,计算船舶所受到的风力估计值 并将其传递给观测器10。
3如图2所示,锚泊监测系统根据张力传感器提供的锚链张力信息,经过滤波器对张力传感器提供的信息滤波后,对锚泊系统锚链的张力进行估计,监测决策器根据锚链的张力估计值和设定的张力阈值进行比较后,发出控制器使能信息,并将其传递给观测器10。当锚链张力的估计值大于锚链张力设定的阈值且持续一定时间时,将控制器使能信息置为“真”,否则为“假”;锚泊力由下式得到:
其中τmooring为锚泊力,η为船舶位置和艏向向量;ν为船舶的速度向量;Gmooring∈R3为位置增益矩阵,Dmooring∈R3为速度增益矩阵。 是船体坐标系与大地坐标系之间的转换矩阵, 为船舶艏向,
4观测器10同时接收传感器系统所反馈的船舶位置/艏向信息 和环境干扰力及锚泊监测系统计算得到的锚泊力,其方程式如下:
是高频运动状态估计向量; 是船舶位置和艏向估计向量;Μ为系统惯性矩阵;D为阻尼矩阵; 为低频干扰力估计值;Tb是慢变干扰力系数矩阵;K1∈R6×3,K2,K3,K4∈R3×3是观测器增益矩阵; 是钻井平台艏向测量值; 和 为常值矩阵; 为船舶速度估计值, 分别是船舶的横向速度、纵向速度及转艏角速度的估计值;τc为控制指令;Gmooring∈R3是位置增益矩阵; 为测量估计值, 为估计误差,可以定义为
5控制器8同时接收观测器输出的平台位置和艏向、速度及低频干扰信息,锚泊监测系统输出的锚泊力估计值和控制器使能信息。当使能信息为“真”时控制器投入使用,推进系统参与定位控制以降低锚泊系统锚链张力,实现推进器辅助锚泊定位功能;当使能信息为“假”时控制器并不投入使用,推进系统不参与定位控制,平台完全依靠锚泊系统进行定位。
当控制器使能信息为“真”时,控制器根据钻井平台定位所需的总的回复力和恢复力矩,对推进系统配置的推进器进行推力分配。通过推力分配来将总推力分配给各个推进器,得到每个推进器需产生的转速和方位角。推力分配的问题属于一个多目标优化问题,优化的的数学模型如下式:
其中f是优化目标函数,W1,W2,W3是权重值;T为推进器输出推力,α是推进器方向角,s是松弛变量,Q为对角线正定矩阵,Ti,0表示前一个时刻的推力值,Ti表示的是当前时刻的推力值;αi,0表示的是前一个时刻的推进器的角度,αi表示的是当前时刻的推进器的角度;δ≥0为惩罚权值,ε>0是用来避免数值问题是一个很小的数, lxi、lyi表示第i个推进器安装位置与船舶重心之间的距离,αi表示每个推进器输出力的方向,τc为控制器输出的推力指令,BT为B的转置矩阵;Tmin为最小推力,Tmax为最大推力;αmin为最小方位角,αmax为最大方位角,ΔTmin为推力最小变化值,ΔTmax为推力最大变化值;Δαmin为方位角变化的最小速度,Δαmax为方位角变化的最大速度;
经过推力分配优化后可以得到各个推进器需产生的转速和方位角,来抵消海洋环境干扰的影响,使平台位置η定位在期望的位置η*上。
基于自动监测控制的钻井平台推进器辅助锚泊定位系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0