

IPC分类号 : B25J3/00,B25J9/16,B25J13/00,B25J13/08







专利摘要
本发明公开了一种磁流变力反馈式数据手套及应用其实现远程操作的方法,手套包括机械部分和控制系统部分,机械部分包括支架、设置在支架前方的四个四指连杆组和一个拇指连杆组、设置在支架顶部的磁流变阻尼器,四指连杆组和拇指连杆组的关节处分别安装角度传感器,角度传感器、磁流变阻尼器分别与控制系统部分连接,由角度传感器、磁流变阻尼器构成力觉来源机构。本发明还公开了应用该手套实现远程操作的方法,具有操作的舒适感高、实现临场感好的优点,可使操作者更加真实的融入到操作的过程中。
说明书
技术领域
本发明涉及数据手套领域,具体是一种磁流变力反馈式数据手套及应用其实现远程操作的方法。
背景技术
在航空航天、深海作业、核工业等复杂、不确定或者不可接近的环境中,需要使用机器人进行作业。由于机器人水平的制约,大多数任务无法自主完成,往往需要操控人员进行监控。借助于视觉、触觉反馈,操作者可以使用遥操作设备实现对远程机器人的精确控制。
数据手套作为一种人机交互的设备,主要功能是帮助操作者借助于视觉反馈来实现对远程机器人的精确控制。这样既可以发挥机器人的各种危险工作的作用,又可以发挥操作者的智能与关键决策作用。
传统的数据手套一般都能够比较准确的测量各个手指关节的转角和手指之间的夹角,进而根据测量的数据对远程的机器人进行精确的控制。然而,操作者无法通过数据手套来感知抓取物体的力度,缺少了一种临场感,从而增加了控制远程机械手的难度,对于某些精细的任务甚至无法完成。因此,开发出一种可以实现临场感的遥操作设备,对于主从机器人的控制具有重大的应用价值。
公开号为CN 100372503C的中国专利申请公开了一种基于气动人工肌肉的力反馈数据手套。公开号为CN 2772746的中国专利申请公开了一种基于磁流变阻尼器的内骨骼式力反馈数据手套,这些装置在主从机器人的控制中能够实现一定的临场感,但仍存在一些问题:(1)前者是一种主动型力觉再现系统,这些力虽然能够提供足够的力觉反馈,但是其一旦出现故障,容易给操作者造成伤害;其次稳定性差,使力反馈性能大打折扣;(2)后者采用磁流变阻尼器,驱动器在手掌内部,这种力反馈数据手套由于驱动器在手掌内部,限制了人手的自然运动,以至于在影响到临场感的实现。因此有必要发明一种力反馈数据手套,使其既能够实现安全有效的力觉再现,又能够在不破坏其功能的情况下,不影响到临场感的实现。
发明内容 针对上述现有技术的缺陷和改进需求,本发明的目的是提供一种磁流变力反馈式数据手套及应用其实现远程操作的方法,以满足对主从机器人的遥操作控制以及更好的实现临场感。
为了达到上述目的,本发明所采用的技术方案为:
磁流变力反馈式数据手套,其特征在于:包括机械部分和控制系统部分,机械部分包括支架,支架底部前方设有一一对应于人体手部食指、中指、无名指、小指的四指连杆组,以及对应于人体手部拇指的拇指连杆组,四个四指连杆组的结构相同,支架顶部后侧对应四个四指连杆组以及一个拇指连杆组后端分别设置有磁流变阻尼器,磁流变阻尼器的活塞杆杆端分别指向前方,其中:
每个四指连杆组分别包括从后向前依次设置在支架前方的四指近指端指套、四指中指端指套、四指远指端指套,四指近指端指套与四指中指端指套之间、四指中指端指套与四指远指端指套之间铰接连接,四指远指端指套顶部铰接有倾斜向上的四指连杆VII,四指中指端指套顶部铰接有倾斜向上的四指连杆VI,四指连杆VI、四指连杆VII上端相互铰接且铰接处构成四指远端关节点,由四指远指端指套、四指中指端指套、四指连杆VI、四指连杆VII构成一个平面四杆机构;四指近指端指套顶部铰接有倾斜向上的四指连杆IV,四指连杆IV上端与四指远端关节点之间铰接有四指连杆V,且四指连杆V与四指连杆IV铰接处构成四指中间关节点,由平面四杆机构与四指近指端指套、四指连杆IV、四指连杆V并联构成平面多杆机构;平面多杆机构中的四指中间关节点处向后铰接有四指连杆III,四指连杆III后端铰接有倾斜向下的四指连杆II,且四指连杆III与四指连杆II铰接处构成四指近端关节点,四指连杆II下端铰接在支架底部前侧,构成平面多杆机构与四指连杆II、四指连杆III、支架的并联关系;四指近端关节点处向后上方倾斜连接有四指连杆I,四指连杆I后端与位置对应的磁流变阻尼器中活塞杆杆端之间铰接有滑块;
所述拇指连杆组包括从后向前次设置在支架前方的拇指近指端指套、拇指远指端指套,拇指近指端指套、拇指远指端指套之间铰接连接,拇指远指端指套上部铰接有倾斜向上的拇指连杆I,拇指近指端指套上部铰接有倾斜向上的拇指连杆III,拇指连杆I上端与拇指连杆III上端相互铰接且铰接处构成拇指关节点,由拇指近指端指套、拇指远指端指套、拇指连杆III、拇指连杆I构成一个平面四杆机构;拇指近指端指套朝向最近四指连杆组的内侧面铰接有拇指连杆II,拇指连杆II向拇指近指端指套内侧延伸;所述支架底部前侧对应拇指连杆组位置设有三轴球铰链,三轴球铰链一个铰接口中向后球铰接有拇指连杆VI,三轴球铰链另一个铰接口中倾斜向上球铰接有拇指连杆VIII,三轴球铰链第三个铰接口中向拇指连杆组内侧方向球铰接有拇指连杆IV,其中拇指连杆IV杆端与拇指连杆II杆端之间铰接有拇指连杆VIIII,且拇指连杆VIIII与拇指连杆II铰接处构成拇指内侧关节点,拇指连杆VIII杆端与拇指关节点之间铰接有拇指连杆VII,拇指连杆VI后端向后铰接有拇指连杆V,拇指连杆V后端与位置对应的磁流变阻尼器中活塞杆杆端之间铰接有滑块;
位于四个四指连杆组各个关节点处、拇指连杆组各个关节点处分别设有角度传感器,所述角度传感器、磁流变阻尼器分别与控制系统部分连接,由角度传感器、磁流变阻尼器构成力觉来源机构。
所述的磁流变力反馈式数据手套,其特征在于:所述控制系统部分包括数据采集卡、计算机、两组电流控制器、D/A转换器、A/D转换器、从机器人,所述计算机与数据采集卡双向通讯连接,各个关节点处的角度传感器输出端分别通过A/D转换器与数据采集卡的信号输入端连接,数据采集卡的信号输出端通过D/A转换器与电流控制器的输入端连接,电流控制器的输出端与从机器人手指的信号输入端对应连接;各个角度传感器的输出信号进入第一组A/D转换器进行信号的模数转换,然后分别送入数据采集卡;
从机器人的手指的信号输出端通过A/D转换器与数据采集卡的信号输入端连接,数据采集卡的信号输出端通过D/A转换器与电流控制器连接,电流控制器输出端与各个磁流变阻尼器输入端连接;从机器人的手指的信号输入到A/D转换器进行信号的转换,然后把数据采集到数据采集卡,经数据采集卡后通过D/A转换器进行信号的转换,然后传送至电流控制器,由电流控制器根据接收的信号对磁流变阻尼器进行反馈控制。
一种应用磁流变力反馈式数据手套实现远程操作的方法,其特征在于:为被动力反馈操作方法,包括以下步骤:
(1)进行系统初始化,调整角度传感器的初始值,磁流变阻尼器处于失电状态;
(2)由计算机发出指令开启传感与控制系统,操作者看到从机器人与环境的交互,进行抓握;抓握过程中,角度传感器采集连杆机构测量的手指各关节的转角信号;
(3)所采集的转角信号经A/D转换器后输入到数据采集卡,由计算机求得抓握的过程中从机器人所需要转动的角度;
(4)计算机按照所需要的转动的角度向数据采集卡输出控制信号,经D/A转换器后驱动从动机器人进行抓握操作;
(5)当从机器人抓握物品的过程中,收集从机器人手所受的力信号,经A/D转换器后输入到数据采集卡;
(6)计算机按照从机器人受力的情况计算出所需产生的反馈力进而计算出所需的控制电流值,然后向数据采集卡输出控制信号,控制磁流变阻尼器产生一定的阻尼力,进而使操作者感受到力觉;
(7)当人感觉所受的反馈力不足以拿稳物品的时候,重复(2)~(6)的过程,直至操作者感觉到力足以拿起物品。
本发明提供一种用于实现遥操作的外骨骼式磁流变力反馈式数据手套及方法,适用于遥操作领域的临场感方面的研究应用。具有如下有益效果:
(1)磁流变阻尼器是一种能量耗散型智能器件,具备有安全,稳定,体积小等优点。通过被动的力反馈,由磁流变阻尼器为操作者的手提供一定的反馈力,同时结合角度传感器检测手指关节的活动范围,有利于提高操作的舒适感,更好的实现临场感。
(2)当操作者进行抓握时,内骨骼式力反馈数据手套的结构件会使临场感的实现大打折扣,而本发明的外骨骼式力反馈数据手套则避免了这种破坏的发生,使操作者更加真实的感受到身临其境。
(3)通过角度传感器等控制元件检测到的数据,并反馈至计算机中,以获取从机器人当前的抓握状态,操作者根据感受到的力觉反馈判断能否稳定的抓握起来来进行下一步操作,使操作者更加真实的融入到操作的过程中。
附图说明
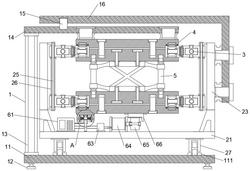
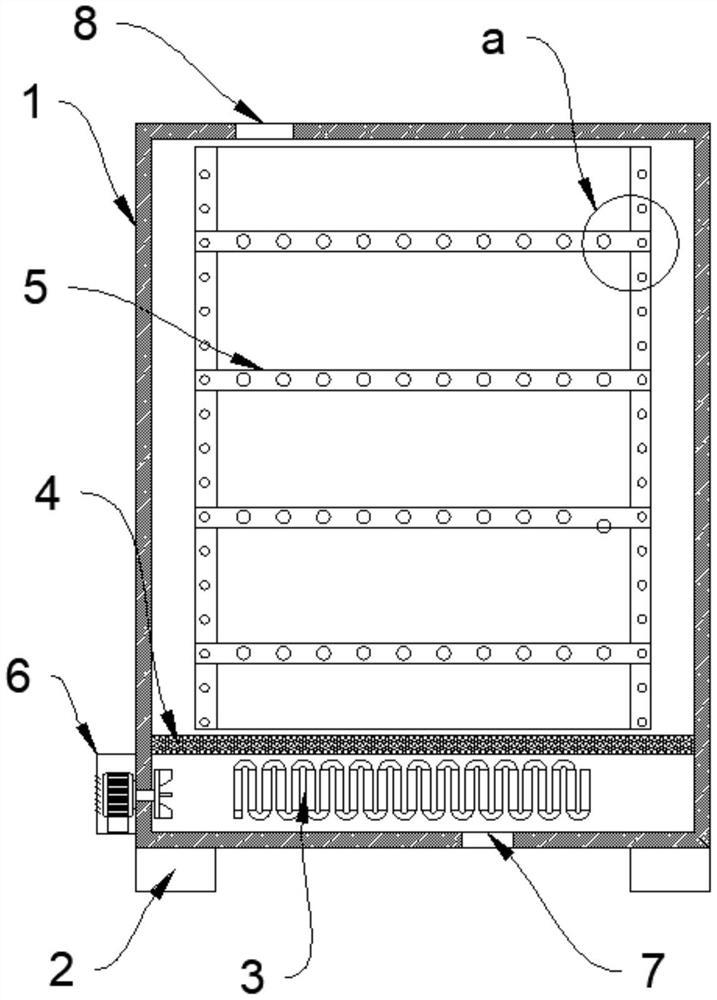
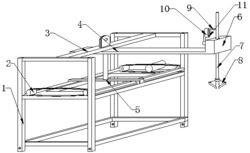
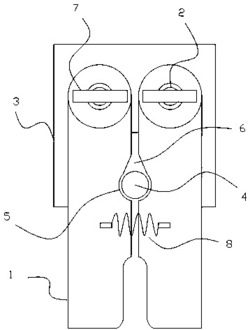
图1是本发明磁流变力反馈式数据手套结构图。
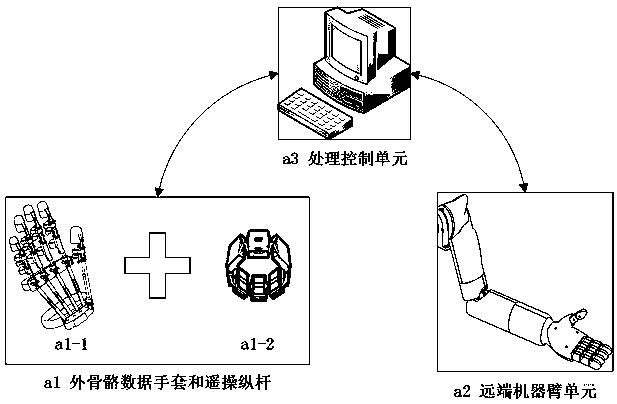
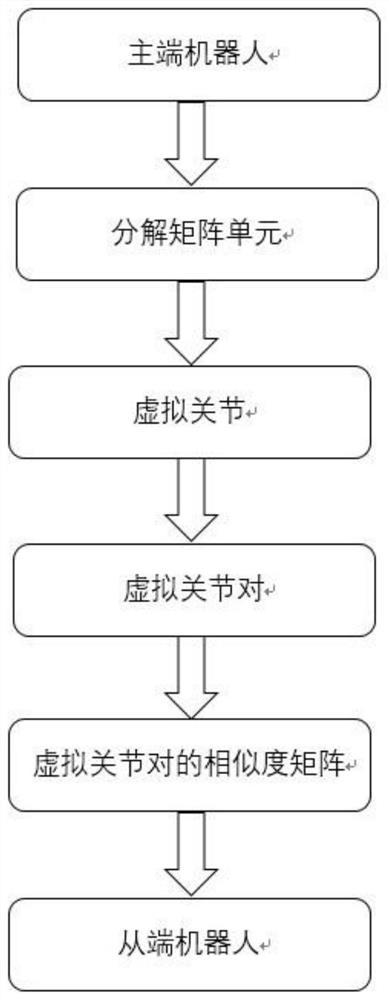
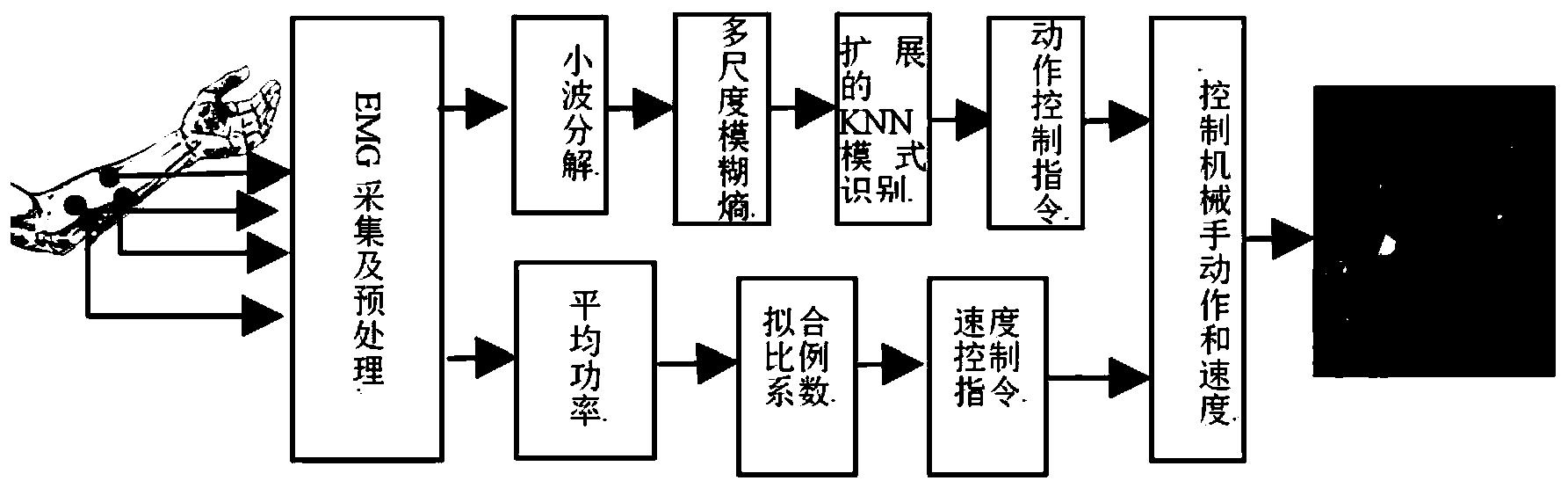
图2是本发明应用磁流变力反馈式数据手套实现远程操作方法框图。
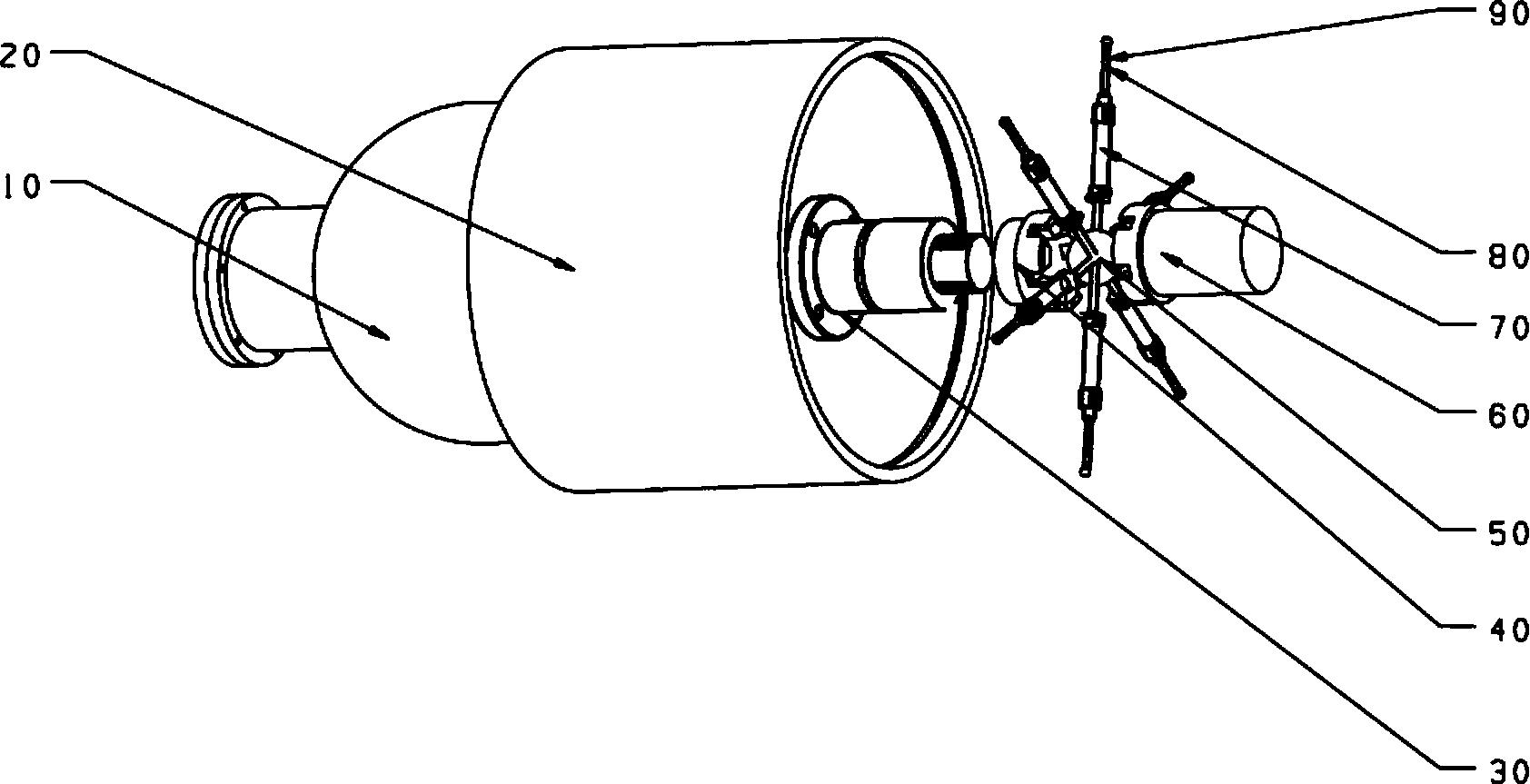
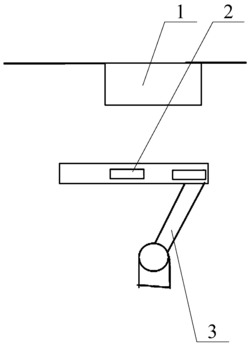
图3是本发明四指连杆组结构图。
图4是本发明拇指连杆组结构图。
图5是本发明球铰链结构图。
图6是本发明指节连接图。
图7是本发明四指连杆组的机构简图。
图8是本发明拇指连杆组的机构简图。
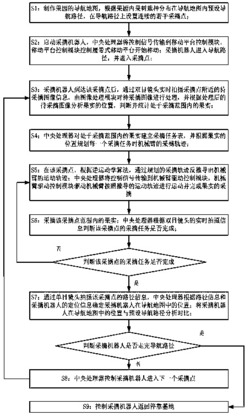
图9是本发明应用磁流变力反馈式数据手套实现远程操作流程图。
具体实施方式
如图1、图3—图8所示,磁流变力反馈式数据手套,包括机械部分和控制系统部分,机械部分包括支架5,支架5底部前方设有一一对应于人体手部食指、中指、无名指、小指的四指连杆组1,以及对应于人体手部拇指的拇指连杆组3,四个四指连杆组1的结构相同,支架5顶部后侧对应四个四指连杆组1以及一个拇指连杆组3后端分别设置有磁流变阻尼器 6,磁流变阻尼器6的活塞杆杆端分别指向前方,其中:
如图2、图7所示,每个四指连杆组1分别包括从后向前依次设置在支架前方的四指近指端指套1.3、四指中指端指套1.2、四指远指端指套1.12,四指近指端指套1.3与四指中指端指套1.2之间、四指中指端指套1.2与四指远指端指套1.12之间铰接连接,四指远指端指套1.12顶部铰接有倾斜向上的四指连杆VII1.11,四指中指端指套1.2顶部铰接有倾斜向上的四指连杆VI1.10,四指连杆VI1.10、四指连杆VII1.11上端相互铰接且铰接处构成四指远端关节点,由四指远指端指套1.12、四指中指端指套1.2、四指连杆VI1.10、四指连杆VII1.11构成一个平面四杆机构;四指近指端指套1.3顶部铰接有倾斜向上的四指连杆IV1.8,四指连杆IV1.8上端与四指远端关节点之间铰接有四指连杆V1.9,且四指连杆V1.9与四指连杆IV1.8铰接处构成四指中间关节点,由平面四杆机构与四指近指端指套1.3、四指连杆IV1.8、四指连杆V1.9并联构成平面多杆机构;平面多杆机构中的四指中间关节点处向后铰接有四指连杆III1.7,四指连杆III1.7后端铰接有倾斜向下的四指连杆II1.6,且四指连杆III1.7与四指连杆II1.6铰接处构成四指近端关节点,四指连杆II1. 6下端铰接在支架5底部前侧,构成平面多杆机构与四指连杆II1. 6、四指连杆III1.7、支架5的并联关系;四指近端关节点处向后上方倾斜连接有四指连杆I1.5,四指连杆I1.5后端与位置对应的磁流变阻尼器中活塞杆杆端之间铰接有滑块1.4;
如图4、图5、图8所示,拇指连杆组3包括从后向前次设置在支架5前方的拇指近指端指套3.3、拇指远指端指套3.1,拇指近指端指套3.3、拇指远指端指套3.1之间铰接连接,拇指远指端指套3.1上部铰接有倾斜向上的拇指连杆I3.2,拇指近指端指套3.3上部铰接有倾斜向上的拇指连杆III3.5,拇指连杆I3.2上端与拇指连杆III3.5上端相互铰接且铰接处构成拇指关节点,由拇指近指端指套3.3、拇指远指端指套3.1、拇指连杆II3.5、拇指连杆I3.2构成一个平面四杆机构;拇指近指端指套3.3朝向最近四指连杆组的内侧面铰接有拇指连杆II3.4,拇指连杆II3.4向拇指近指端指套3.3内侧延伸;支架5底部前侧对应拇指连杆组3位置设有三轴球铰链4,三轴球铰链4一个铰接口中向后球铰接有拇指连杆VI3.9,三轴球铰链4另一个铰接口中倾斜向上球铰接有拇指连杆VIII3.11,三轴球铰链4第三个铰接口中向拇指连杆组3内侧方向球铰接有拇指连杆IV3.6,其中拇指连杆IV3.6杆端与拇指连杆II3.4杆端之间铰接有拇指连杆VIIII3.13,且拇指连杆VIIII3.13与拇指连杆II3.4铰接处构成拇指内侧关节点,拇指连杆VIII3.11杆端与拇指关节点之间铰接有拇指连杆VII3.10,拇指连杆VI3.9后端向后铰接有拇指连杆V3.8,拇指连杆V3.8后端与位置对应的磁流变阻尼器中活塞杆杆端之间铰接有滑块3.7;
位于四个四指连杆组1各个关节点处、拇指连杆组3各个关节点处分别设有角度传感器2,角度传感器2、磁流变阻尼器 6分别与控制系统部分连接,由角度传感器2、磁流变阻尼器 6构成力觉来源机构。
如图2所示,控制系统部分包括数据采集卡、计算机、两组电流控制器、D/A转换器、A/D转换器、从机器人,计算机与数据采集卡双向通讯连接,各个关节点处的角度传感器输出端分别通过A/D转换器与数据采集卡的信号输入端连接,数据采集卡的信号输出端通过D/A转换器与电流控制器的输入端连接,电流控制器的输出端与从机器人手指的信号输入端对应连接;各个角度传感器的输出信号进入第一组A/D转换器进行信号的模数转换,然后分别送入数据采集卡;
从机器人的手指的信号输出端通过A/D转换器与数据采集卡的信号输入端连接,数据采集卡的信号输出端通过D/A转换器与电流控制器连接,电流控制器输出端与各个磁流变阻尼器输入端连接;从机器人的手指的信号输入到A/D转换器进行信号的转换,然后把数据采集到数据采集卡,经数据采集卡后通过D/A转换器进行信号的转换,然后传送至电流控制器,由电流控制器根据接收的信号对磁流变阻尼器进行反馈控制。
本发明由拇指连杆组3和食指、中指、无名指以及小指的四指连杆组1、支架5、三轴球铰链4、安装在每个关节处的角度传感器2以及每个连杆组滑块输出部分所连接的磁流变阻尼器6组成。
如图3和图7所示,四指连杆组1是通过四指连杆I1.5、四指连杆II1.6、四指连杆III1.7、四指连杆IV1.8、四指连杆V1.9、四指VI1.10、四指连杆VII1.11、滑块1.4、四指远指端指套1.12、四指中指端指套1.2、四指近指端指套1.3、可调节绑带1.13以及磁流变阻尼器7通过图7所示的机构简图通过铰链连接而构成的,此机构有三个自由度,通过操作者的三个关节的运动带动三个指套的运动得到一个确定的滑块1.4的运动;所述铰链连接均通过镀镍螺丝子母铆钉1.1来进行连接。
如图4和图8所示,拇指连杆组3是通过拇指远指端指套3.1、拇指近指端指套3.3、拇指连杆I3.2、拇指连杆II3.4、拇指连杆III3.5、拇指连杆IV3.6、拇指连杆V3.8、拇指连杆VI3.9、拇指连杆VII3.10、拇指连杆VIII3.11、滑块3.7、可调节绑带3.12以及磁流变阻尼器7通过图8所示的机构简图通过铰链连接而构成的,此机构有三个自由度,通过操作者大拇指两个关节的转动以及大拇指的横向运动来带动指套的运动得到一个确定的滑块的运动。同种所有的铰链连接分别是通过镀镍螺丝子母铆钉1.1来实现的。
如图2所示,传感与控制系统包括KMZ41型角度传感器2、A/D转换器、D/A转换器、电流控制器、数据采集卡和计算机。KMZ41型角度传感器2安装在每个关节的铰链之间,用来实时的采集每个关节的角度信息,A/D转换器和D/A转换器用来进行必要的模拟量和数字量之间的转换。数据采集卡用来收集采集到的角度信息以及从机器人反馈的角度和力觉信息。计算机用来处理数据采集卡收集的数据以便更好的进行人机交互。电流控制器有两方面的作用,一方面在于通过改变电流的大小来改变磁场的大小来控制磁流变阻尼器所产生的阻尼力的大小;另一方面在于控制从机器人的手指的弯曲角度和力觉等信息。
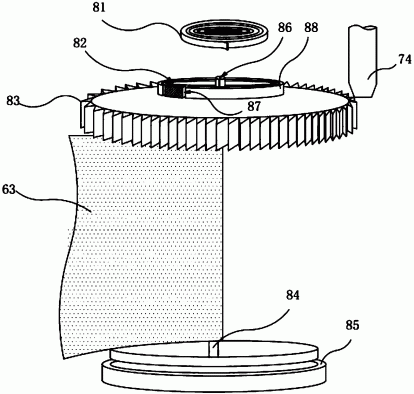
如图5为本发明拇指连杆组机构中所采用的三轴球铰链4,它通过空间球铰链的优点将空间中两个方向的力连接到一个方向上,进而连接到磁流变阻尼器6进行力觉反馈。
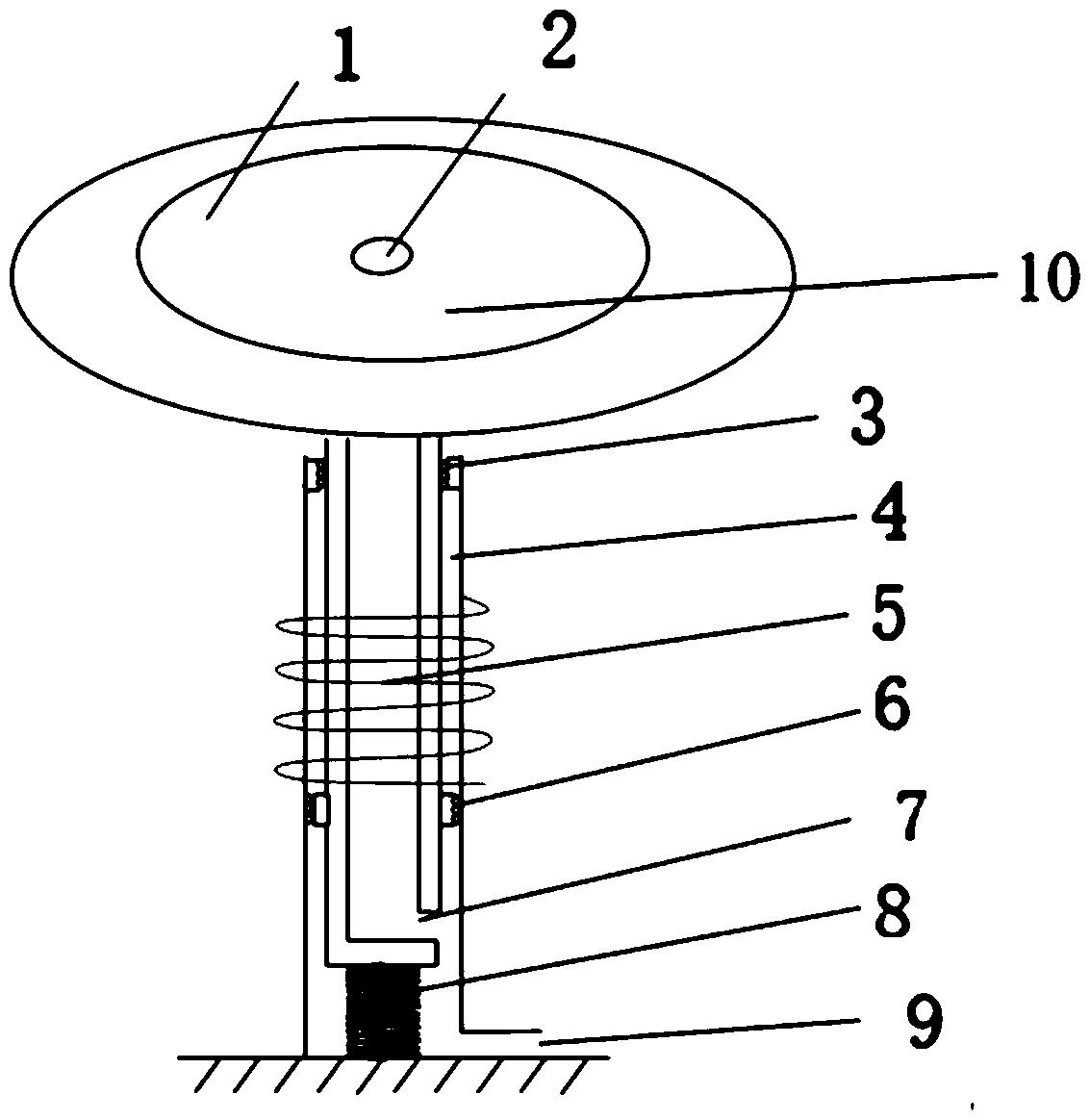
如图6所示为本发明的指节与指节的连接方式,在前一个指节的末端和后一个指节的前端分别伸出一个铰链孔,然后通过镀镍螺丝子母铆钉1.1将两个指节进行铰接,实现两个指节的相对运动恰好模拟操作者手指关节的转动。
如图9所示,一种应用磁流变力反馈式数据手套实现遥操作的方法,具体实施步骤如下:
(1)进行系统初始化,调整角度传感器的初始值,磁流变阻尼器处于失电状态;
(2)由计算机发出指令开启传感与控制系统,操作者看到从机器人与环境的交互,进行抓握。抓握过程中,各角度传感器采集连杆组测量的手指各关节的转角信号;
(3)所采集的转角信号经A/D转换器后输入到数据采集卡,由计算机求得抓握的过程中从机器人所需要转动的角度;
(4)计算机按照所需要的转动的角度向数据采集卡输出控制信号,经D/A转换器后驱动从动机器人进行抓握操作;
(5)当从机器人抓握物品的过程中,收集从机器人手所受的力信号,经A/D转换器后输入到数据采集卡;
(6)计算机按照从机器人受力的情况计算出所需产生的反馈力进而计算出所需的控制电流值,然后向数据采集卡输出控制信号,控制磁流变阻尼器产生一定的力觉。
(7)当人感觉所受的反馈力不足以拿稳物品的时候,重复(2)~(6)的过程,直至操作者感觉到力足以拿起物品。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
磁流变力反馈式数据手套及应用其实现远程操作的方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0