








专利摘要
本发明提供一种全自动巡线机器人购物车及购物系统。全自动巡线机器人购物车包括车身、控制系统、动力系统、转向系统、蔽障系统和巡线系统;控制系统包括固定在推杆上的平板触控电脑和固定在车筐下方的下层控制单元;动力系统固定在车筐下方、并与后轮连接;转向系统设置在车筐下方,转向系统能以垂直于地面的轴进行180度旋转,转向系统上固定有前轮;蔽障系统固定在车筐前进方向的侧壁上;巡线系统固定在车筐下方;平板触控电脑、动力系统、转向系统、蔽障系统和巡线系统分别与下层控制单元电联。本发明全自动巡线机器人购物车结构简单、合理、紧凑,克服了现有技术的诸多缺点,能在承装货物的同时实现导购和自动行走的功能。
权利要求
1.一种全自动巡线机器人购物车,其特征在于,包括车身、控制系统、动力系统、转向系统、蔽障系统和巡线系统;
所述车身包括车筐、固定在车筐一侧的推杆和设置在车筐下方的前轮和后轮;所述控制系统包括固定在推杆上的平板触控电脑和固定在车筐下方的下层控制单元;所述动力系统固定在车筐下方、并与后轮连接;所述转向系统设置在车筐下方,所述转向系统能以垂直于地面的轴进行180度旋转,所述转向系统上固定有前轮;所述蔽障系统固定在车筐前进方向的侧壁上;所述巡线系统固定在车筐下方;所述平板触控电脑、动力系统、转向系统、蔽障系统和巡线系统分别与下层控制单元电联。
2.根据权利要求1所述全自动巡线机器人购物车,其特征在于,所述平板触控电脑延长面与地面的夹角为30-60度。
3.根据权利要求1所述全自动巡线机器人购物车,其特征在于,所述动力系统包括直流伺服电机。
4.根据权利要求1所述全自动巡线机器人购物车,其特征在于,所述转向系统包括舵机和E型金属支架,所述舵机固定在车筐下方,所述E型金属支架中间的伸出端固定在舵机的输出轴上,所述E型金属支架两侧的两个伸出端分别固定有前轮。
5.根据权利要求1或4所述全自动巡线机器人购物车,其特征在于,所述前轮为万向轮。
6.根据权利要求1或4所述全自动巡线机器人购物车,其特征在于,所述前轮的半径小于后轮半径。
7.根据权利要求1所述全自动巡线机器人购物车,其特征在于,所述蔽障系统为蔽障传感器。
8.根据权利要求1所述全自动巡线机器人购物车,其特征在于,所述巡线系统包括红外巡线传感器,所述红外巡线传感器的探头朝向地面。
9.根据权利要求1所述全自动巡线机器人购物车,其特征在于,所述全自动巡线机器人购物车车筐下方还固定有金属架,所述舵机固定在金属架上;所述巡线系统固定在金属架上远离后轮的一端。
10.一种全自动巡线机器人购物系统,其特征在于,包括权利要求1-9任意一项所述全自动巡线机器人购物车和铺设在地面上的能与全自动巡线机器人购物车配合的引导线。
说明书
技术领域
本发明涉及机器人技术,尤其涉及一种全自动巡线机器人购物车及购物系统。
背景技术
当前国内出现两款超市用机器人:一种,类似于客服机器人,不能移动,顾客自助式服务,该客服机器人能根据顾客输入的关键字进行查询,查找目标商品的位置,不具备导航功能,且不能帮助超市进行促销。
另一种导购机器人可以稍微移动,采用图像处理等高成本且不成熟的技术,成本昂贵,维护费用更高,难以广泛应用于超市卖场。而且该导购机器人工作的重点不是为顾客提供导购,而是侧重在机器人本身的酷炫,该导购机器人会把顾客注意力转移到机器人本身,而不是购物。
综上,现有的两种超市用机器人都存在以下不足:顾客需要自己寻找商品,自己推运。亟待一种能实现导购和自动行走的超市用机器人。
发明内容
本发明的目的在于,针对上述现有超市用机器人无法实现导购和自动行走的问题,提出一种全自动巡线机器人购物车,该购物车能在承装货物的同时实现导购和自动行走的功能。
为实现上述目的,本发明采用的技术方案是:一种全自动巡线机器人购物车,包括车身、控制系统、动力系统、转向系统、蔽障系统和巡线系统;
所述车身包括车筐、固定在车筐一侧的推杆和设置在车筐下方的前轮和后轮;所述控制系统包括固定在推杆上的平板触控电脑和固定在车筐下方的下层控制单元;所述动力系统固定在车筐下方、并与后轮连接;所述转向系统设置在车筐下方,所述转向系统能以垂直于地面的轴进行180度旋转,所述转向系统上固定有前轮;所述蔽障系统固定在车筐前进方向的侧壁上;所述巡线系统固定在车筐下方;所述平板触控电脑、动力系统、转向系统、蔽障系统和巡线系统分别与下层控制单元电联。
进一步地,所述平板触控电脑延长面与地面的夹角为30-60度,以方便用户操作和观看,且操作台的设置高度应适合于大多数用户触控操作。
进一步地,所述动力系统包括直流伺服电机,所述直流伺服电机为两个分别与两个后轮连接。
进一步地,所述转向系统包括舵机和E型金属支架,所述舵机固定在车筐下方,所述E型金属支架中间的伸出端固定在舵机的输出轴上,所述E型金属支架两侧的两个伸出端分别固定有前轮。
进一步地,所述前轮为万向轮。
进一步地,所述前轮的半径小于后轮半径。
进一步地,所述蔽障系统为蔽障传感器,具体为红外感应器。
进一步地,所述巡线系统包括红外巡线传感器,所述红外巡线传感器的探头朝向地面。为了使红外巡线传感器的探头与地面间间距处于有效传感距离,所述巡线系统还包括巡线器支架,所述巡线器支架一端固定在车筐下方,另一端固定红外巡线传感器。
进一步地,所述全自动巡线机器人购物车车筐下方还固定有金属架,所述舵机固定在金属架上;所述巡线系统固定在金属架上远离后轮的一端,当所述巡线系统包括巡线器支架时,所述巡线器支架一端固定在金属架,另一端固定红外巡线传感器。
本发明的另一个目的还提供了一种全自动巡线机器人购物系统,包括上述全自动巡线机器人购物车和铺设在地面上的能与全自动巡线机器人购物车配合的引导线。所述引导线由20cm宽的黑色底色和中间2cm宽的白线构成。
本发明全自动巡线机器人购物车及购物系统结构简单、合理、紧凑,与现有技术相比较具有以下优点:
1、导购功能,本发明全自动巡线机器人购物车能根据顾客在控制系统输入的目标商品,制定相应的路线,将顾客引导至目标商品存放处,并同时驮运商品,使顾客将更多的注意力放在购物中;
2、携带功能,本发明全自动巡线机器人购物车在超市里能按指定的路线行进,将顾客双手从手推购物车中解放出来;
3、采用机械转向装置,结构新颖、灵活、紧凑,空间利用合理,能自由转向,使购物车在行进过程中自由转弯;本发明动力系统采用带减速箱的直流伺服电机,扭力大且速度慢,能够跟上顾客的行进速度;
4、本发明全自动巡线机器人购物车整体机械结构具有良好的可维护性和扩展性,制造方便、造价低廉,能广泛应用于各大超市卖场。
附图说明
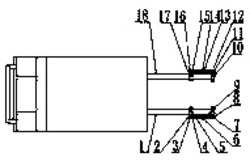
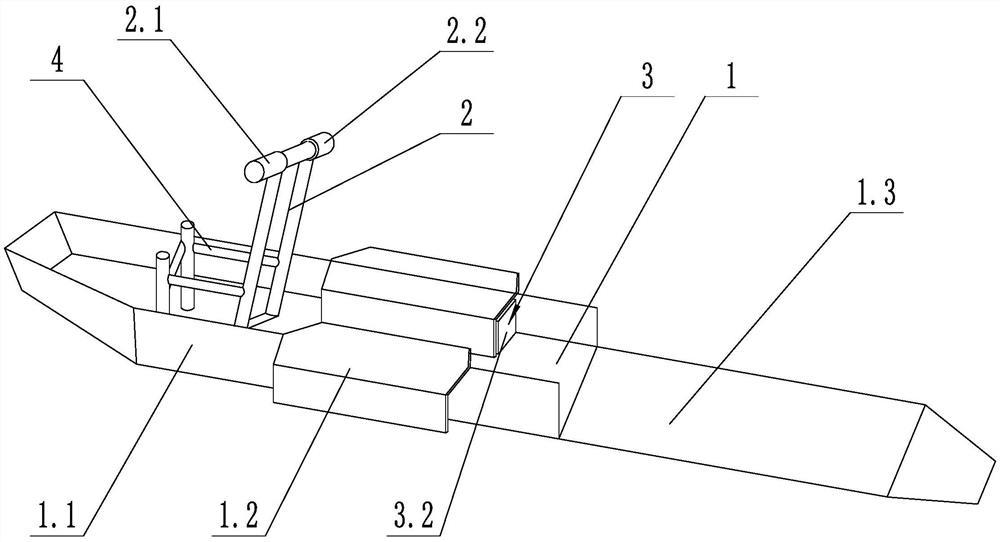
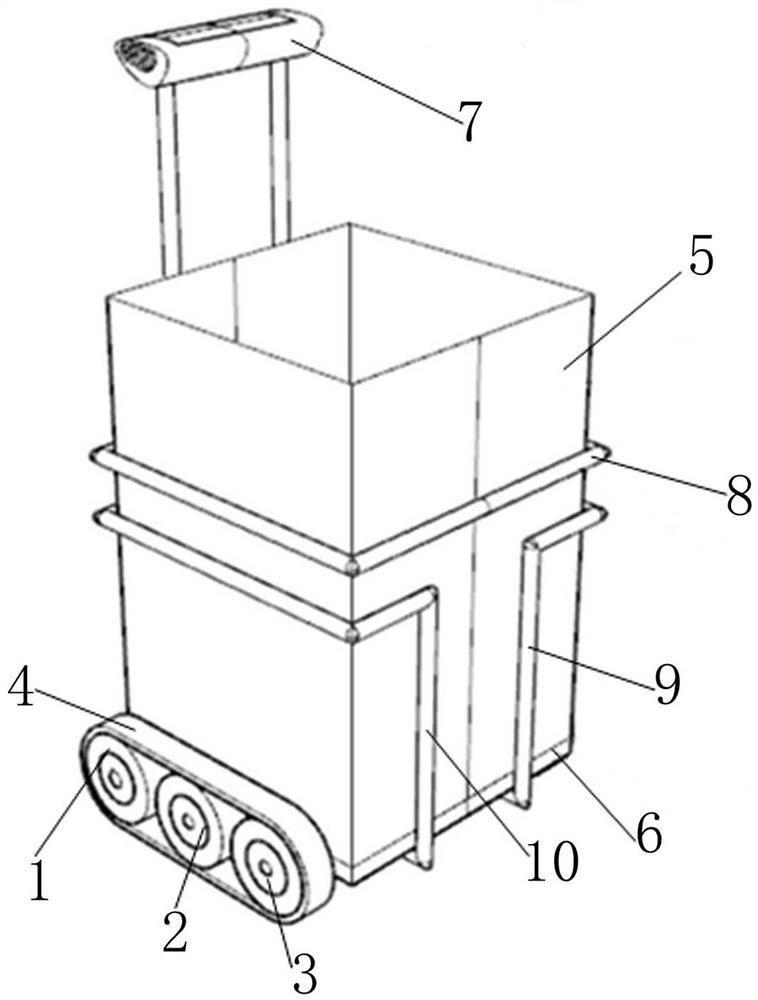
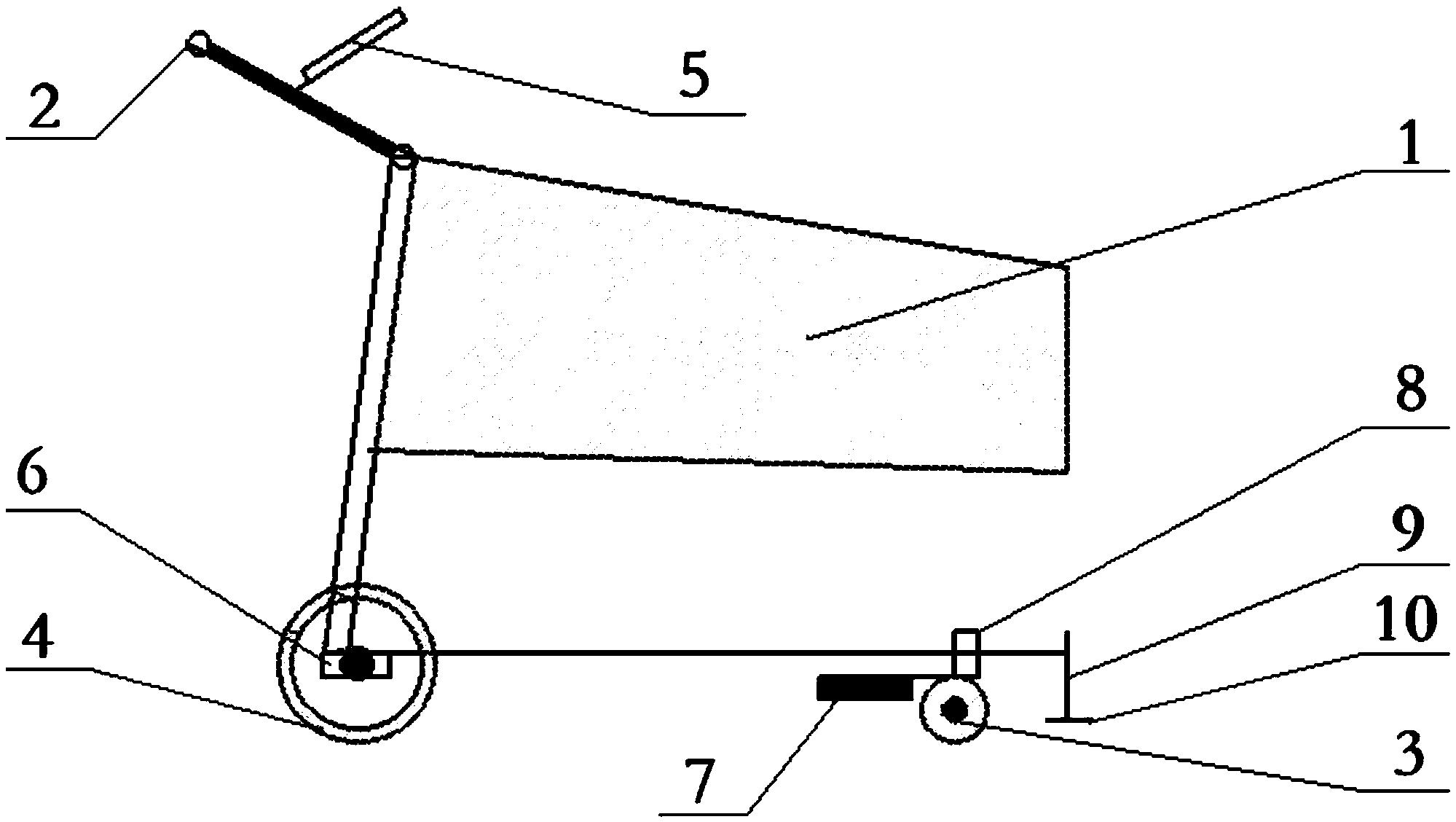
图1为全自动巡线机器人购物车的左视图;
图2为全自动巡线机器人购物车的仰视图。
其中:1-车筐;2-推杆;3-前轮;4-后轮;5-平板触控电脑;6-动力系统;7-E型金属支架;8-舵机;9-巡线器支架;10-红外巡线传感器;11-避障传感器;12-下层控制系统。
具体实施方式
以下结合实施例对本发明进一步说明:
图1为全自动巡线机器人购物车的左视图;图2为全自动巡线机器人购物车的仰视图。
本实施例公开了一种能广泛应用于超市卖场的全自动巡线机器人购物车,如图1和图2所示该全自动巡线机器人购物车包括车身、控制系统、动力系统6、转向系统、蔽障系统和巡线系统;
本实施例所采用的车身与现有超市购物车相同,包括具有一定容置空间的车筐1、固定在车筐1一侧的推杆2和设置在车筐1下方的前轮3和后轮4,前轮3和后轮4的个数分别为两个,前轮3的半径小于后轮4的半径,前轮3为万向轮;此外,本实施例中全自动巡线机器人购物车车筐1下方还固定有用于固定转向系统和巡线系统的金属架(也称为底盘);
本实施例中控制系统包括固定在推杆上、内置有管理程序的平板触控电脑5和固定在车筐下方的下层控制单元12。为方便用户操作和观看,平板触控电脑5延长面与地面的夹角为30-60度,且该平板触控电脑5的设置高度应适合于大多数用户触控操作。
动力系统6固定在车筐1下方、并与后轮4连接,用于驱动后轮4运转;本实施例中动力系统6包括两个直流伺服电机,分别与两个后轮4连接,即两个后轮4分别受控于两个直流伺服电机,且两个驱动轮非同轴安装,故能实现两个后轮4的速度差,使全自动巡线机器人购物车转弯。
转向系统设置在车筐1下方,转向系统能以垂直于地面的轴进行180度旋转,转向系统上固定有前轮3。具体地,本实施例中转向系统包括舵机8和E型金属支架7,舵机8固定在金属架靠近前进方向的中心位置,E型金属支架7中间的伸出端固定在舵机的输出轴上,E型金属支架两侧的两个伸出端分别固定有前轮3。
如图所示,蔽障系统固定在车筐前进方向的侧壁上,本实施例中蔽障系统为蔽障传感器11,用于检测车筐前方是否存在影响全自动巡线机器人购物车前进的障碍物。
巡线系统固定在车筐1下方,具体的固定在金属架上远离后轮4的一端,巡线系统包括红外巡线传感器10,所述红外巡线传感器10的探头朝向地面。为了使红外巡线传感器10的探头与地面间间距处于有效传感距离,所述巡线系统还包括巡线器支架9,巡线器支架9一端固定在车筐1下方的金属架上,另一端固定红外巡线传感器10。
平板触控电脑5、动力系统6、转向系统、蔽障系统和巡线系统分别与下层控制单元12电联。
本实施例全自动巡线机器人购物车在使用时,还需在地面上铺设能与全自动巡线机器人购物车配合的引导线。引导线由20cm宽的黑色底色和中间2cm宽的白线构成
本实施例全自动巡线机器人购物车的工作原理如下:
全自动巡线机器人购物车初始状态时,红外巡线传感器10处于引导线白线上方。启动电源后,控制系统初始化,预设好各个模块(部件)的初值,为接下来正常工作做准备,转向系统的舵机8处于中心值处(以舵机转到最左侧为0度,转到最右侧为180度,初始化的时候,为了让舵机于与运动方向保持一致的,应该转到中间,即90度为中心值。两个前轮3相应的调整为与行进方向平行。顾客在平板触控电脑上输入搜索商品,平板触控电脑5搜寻到商品位置后,计算出当前位置到商品位置之间的最优路径。
下层控制单元12发送行走指令,动力系统6得到行走信号,开始转动,全自动巡线机器人购物车通过红外巡线传感器10的探头探测当前车筐头部与引导线的位置关系,并根据红外巡线传感器10反馈给平板触控电脑信号,控制转向系统进行微调,保证车子中心线与引导线重合。在车筐1前侧装有蔽障传感器11,通过避障传感器11传回来的信号,下层控制单元12分析信号,并判断出来障碍物距离,将信号传递给平板触控电脑5,平板触控电脑给下层控制单元12发送停止等待指令,动力系统6得到停止信号,后轮4停止转动,当避障传感器11探测出障碍物已消失,将信号反馈给下层控制单元12,下层控制单元12分析出当前前方无障碍物,将信号传递给平板触控电脑5,平板触控电脑5发送行走指令,全自动巡线机器人购物车继续按照之前计算的路线进行行走,路口的引导线是直角交叉口,经过路口时,红外巡线传感器10检测一瞬间的白色区域,记录经过路口的数目,当到达指定路口时,平板触控电脑发送左转(或者右转指令),转向系统的舵机8得到向左转90度信号,向左打最大角度,同时动力系统6得到差速控制信号,控制两个后轮4的差速(左轮倒转,右轮正转),当红外巡线传感器10再次检测到白线时候,动力系统6得到差速控制停止信号,转向系统的舵机8回到中心值,此时购物车完成转向,且前轮3与行进方向平行,接下来可以继续进行直线循线行走。
本实施例全自动巡线机器人购物车环境适应能力强,可适应不同的超市,只需铺上引导线,就可以辅助顾客完成购物,帮助顾客驮运商品,且可以在平板触控电脑上刊登、播放广告,平板触控电脑上也可以扩展相应的娱乐软件,令顾客购物更愉快。
本发明不局限于上述实施例所记载的全自动巡线机器人购物车及购物系统,其中控制系统、动力系统、转向系统和巡线系统的改变均在本发明的保护范围之内。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
全自动巡线机器人购物车及购物系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0