










专利摘要
本实用新型为一种基于绳牵引串联弹性驱动的物理性人机交互平台。其中包括直流伺服电机、减速器、联轴器、绞盘、直线导轨、滑块、磁栅尺、弹簧、手柄和旋转轴等。人的上肢驱动手柄沿直线导轨进行运动,与此同时,直流伺服电机提供相应的驱动力,驱动绞盘牵引绳索,从而改变弹性元件的形变量,达到控制人机交互的力矩和阻抗的效果。通过设计相应的阻抗控制器,可以实现安全、柔顺、稳定的人机交互。
权利要求
1.一种基于绳牵引串联弹性驱动的物理性人机交互平台,其特征是:该物理性人机交互平台包括一个底板,底板的一侧安装有一条直线滑轨以及与直线滑轨平行的一根磁条,直线滑轨上安装有三个滑块,顺次为第一滑块、第二滑块和第三滑块,三个滑块中间通过两根弹簧相连,在中间的第二滑块上固定有手柄座和手柄,用于人机交互,在两端的第一滑块和第三滑块的外侧各安装有一个用于固定绳索的挂钩;三个滑块的侧面上各安装有一个磁栅尺读数头共计3个,3个磁栅尺读数头和磁条配合构成位置测量装置;在底板的另一侧安装有一个用于固定电机和绞盘的U型电机架,电机架一端的外侧固定安装有直流伺服电机,电机轴穿过电机架后与联轴器固定,联轴器另一端与绞盘连接在一起,同时绞盘的另一端连接固定有一个丝杆,丝杆由U型电机架另一端的螺孔穿出,电机轴所在直线与直线滑轨垂直;所述绞盘上反向缠绕有两个绳索,绳索的一端与绞盘固定,绳索的另一端分别通过电机架和直线滑轨之间的底板上安装的三个旋转轴与第一滑块或第三滑块外侧的挂钩连接固定。
2.根据权利要求1所述的一种基于绳牵引串联弹性驱动的物理性人机交互平台,其特征是:所述绞盘上两根绳索的一端分别固定在绞盘的外侧并向中间反向缠绕,接出方向一左一右且位于绞盘的同侧并使两根绳索在旋转过程中不会卷在一起或者发生侧向偏移。
3.根据权利要求1或2所述的一种基于绳牵引串联弹性驱动的物理性人机交互平台,其特征是:所述绞盘上引出的两根绳索的末端分别与直线滑轨平行。
4.根据权利要求1或2所述的一种基于绳牵引串联弹性驱动的物理性人机交互平台,其特征是:三个滑块中间安装的两根弹簧的弹性系数和长度相同。
说明书
技术领域
本实用新型涉及一种基于绳牵引串联弹性驱动的物理性人机交互平台,一般用于机器人领域与康复医疗器械领域。
背景技术
随着机器人技术的发展,机器人越来越多地需要与人或外界环境发生物理性交互。而在机器人执行交互任务时,安全性是至关重要的。传统的机器人往往采用刚性驱动来保证快速响应和高精度的需求,如若出现故障,可能会对操作者和交互环境造成威胁。为了提升系统的安全性,可以通过机器人的主动柔顺和被动柔顺两种方式来实现。
在主动柔顺中,通过设计阻抗或导纳控制器来调节机器人末端执行器的力与位移之间的动态关系,即调节交互阻抗的大小。而对于刚性驱动,如若在执行任务过程中发生断电而使得阻抗控制器失效,依然会对人或环境造成潜在伤害。
串联弹性驱动器(Series Elastic Actuator,SEA)具有柔顺性强、阻抗低、输出稳定、能量缓冲及贮存、抗外力冲击、安全等优点,可以实现系统的被动柔顺并提升系统的安全性。
绳索具有质量轻,力传输方向单一的特点,同时在力突变且超过阈值的情况下发生断裂,使传输力消失,起到进一步的保护作用。
实用新型内容
本实用新型提供一种基于绳牵引串联弹性驱动的物理性人机交互平台,通过串联弹性驱动器来提升系统的被动柔顺度,通过阻抗控制提升系统的主动柔顺度,结合绳牵引,提升体统的稳定性和安全性。
本实用新型的技术方案
一种基于绳牵引串联弹性驱动的上肢物理性人机交互平台,包括一个铝合金底板,底板的一侧安装有一条直线滑轨以及与直线滑轨平行的一根磁条,直线滑轨上安装有三个滑块,顺次为第一滑块、第二滑块和第三滑块,三个滑块中间通过两根弹性系数和长度相同的弹簧相连,在中间的第二滑块上固定有手柄座和手柄,用于人机交互,在两端的第一滑块和第三滑块的外侧各安装有一个用于固定绳索的挂钩;三个滑块的侧面上各安装有一个磁栅尺读数头共计3个,3个磁栅尺读数头和磁条配合构成位置测量装置,用于对三个滑块的位置进行实时测量,以得到两根弹簧的形变量,通过计算得到弹簧的弹性力大小;进一步获得人手的位置信息和受力情况;在底板的另一侧安装有一个用于固定电机和绞盘的U型电机架,电机架一端的外侧固定安装有直流伺服电机,电机轴穿过电机架后与联轴器固定,联轴器另一端与绞盘连接在一起,同时绞盘的另一端连接固定有一个丝杆,丝杆由U型电机架另一端的螺孔穿出,电机轴所在直线与直线滑轨垂直;所述绞盘上反向缠绕有两个绳索,绳索的一端与绞盘固定,绳索的另一端分别通过电机架和直线滑轨之间的底板上安装的三个旋转轴与第一滑块或第三滑块外侧的挂钩连接固定。
所述绞盘上两根绳索的一端分别固定在绞盘的外侧并向中间反向缠绕,接出方向一左一右且位于绞盘的同侧并使两根绳索在旋转过程中不会卷在一起或者发生侧向偏移。两根绳索的末端分别与直线滑轨平行。
本实用新型优点和有益效果在于:
本实用新型采用绳牵引串联弹性驱动器,具有柔顺性强、阻抗低、输出稳定、能量缓冲及贮存、抗外力冲击、安全等优点,可以提升人机交互系统的柔顺性、安全性和稳定性。
附图说明
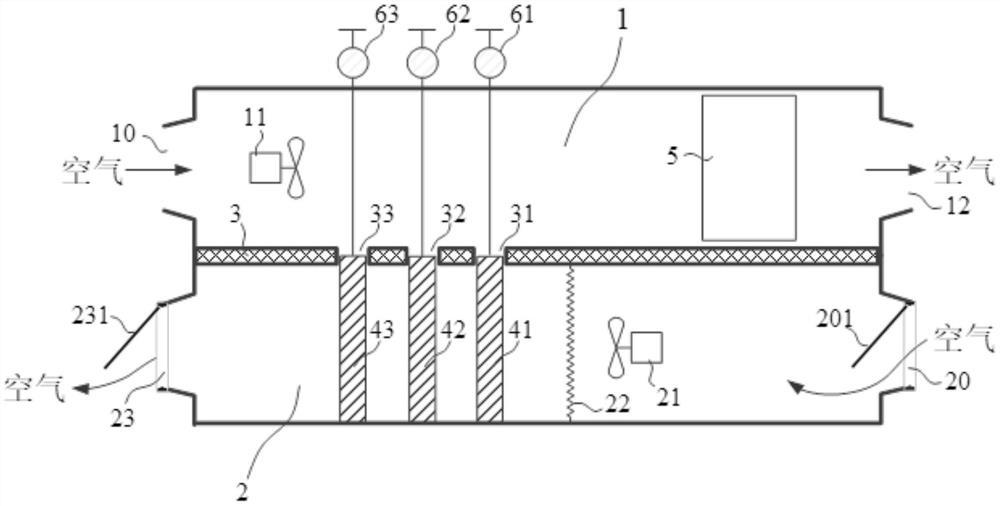
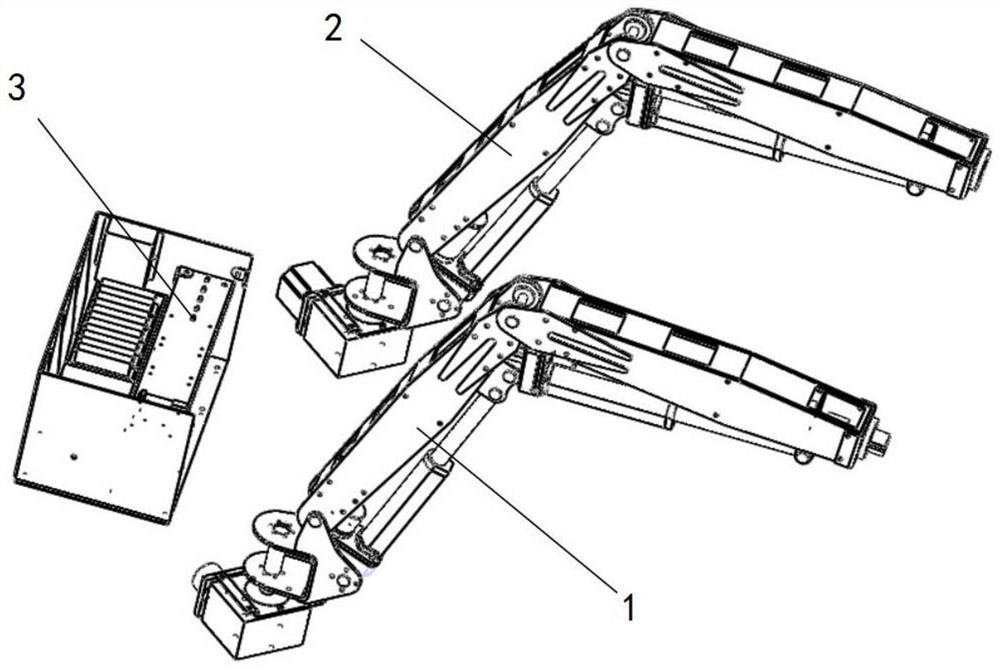
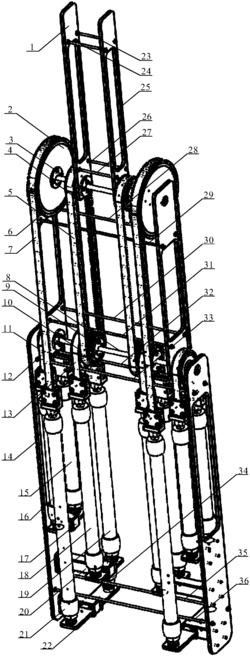
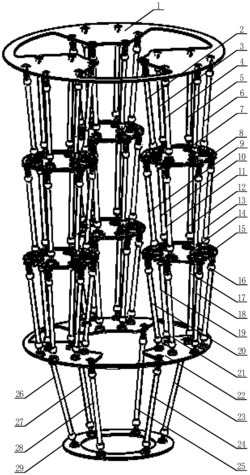
图1是基于串联弹性驱动的物理性人机交互平台机械结构示意图。
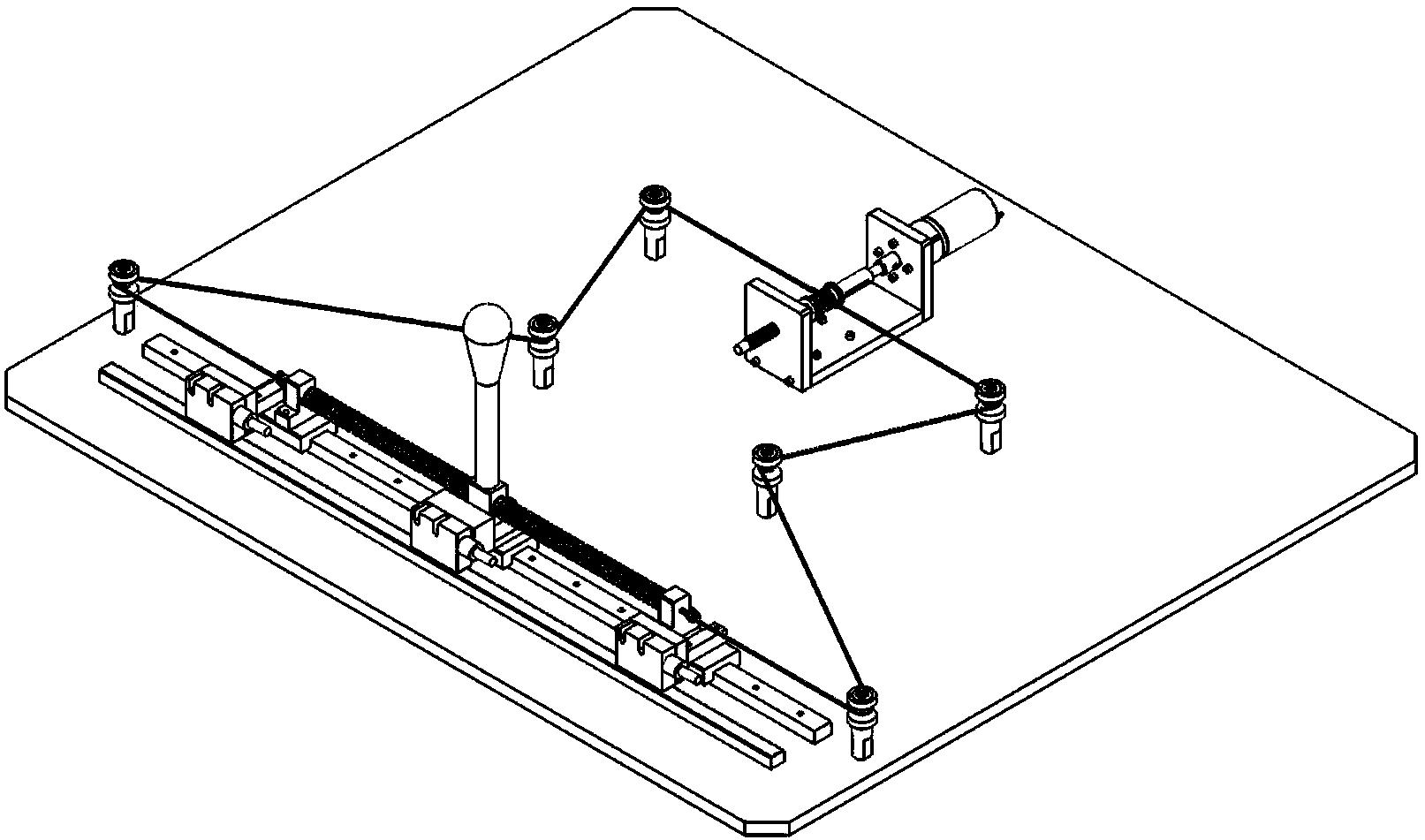
图2是基于串联弹性驱动的物理性人机交互平台俯视图。
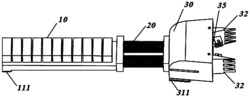
图3是电机架及联轴器机械结构示意图。
图4是电机架侧视图。
图5是钢丝绳缠绕方式。
图6是人机交互端示意图。
图7是钢丝绳连接方式示意图。
图8是旋转轴。
图9是阻抗控制框图。
图中,1直流伺服电机,2电机架,3联轴器,4绞盘,5丝杆,6手柄座,7第一滑块,8第二滑块,9第三滑块,10滑轨,11弹簧,12磁栅尺读数头,13磁条,14挂钩,15钢丝绳,16手柄,17底板,18第一旋转轴,19第二旋转轴,20第三旋转轴。
图1和图2中15所示为钢丝绳路径。
图5中为钢丝绳在绞盘上的固定与缠绕方式。
具体实施方式
下面结合附图对本实用新型做更详细的描述
如图1和图2所示,基于绳牵引串联弹性驱动的物理性人机交互平台,包括一个铝合金底板17,在底板靠上的位置安装有用来固定伺服电机1和联轴器3的U型铝合金框架,在这里称之为电机架,即电机架2。伺服电机1通过螺丝固定在电机架一端的外侧,电机轴穿过电机架后通过紧定螺丝与联轴器固定。联轴器另一端与绞盘4连接在一起,同时绞盘末端与一个螺纹结构的丝杆5连接构成一个整体,丝杆5通过螺纹安装在电机架另一端上,如图3和图4所示。电机架相对于固定电机一侧的对侧有与丝杆相匹配的螺孔,丝杆由此处穿出。
上述绞盘4用于固定和驱动两根绳索即钢丝绳15,钢丝绳的缠绕方式如图5所示。该物理性人机交互平台共使用2根长度相同,直径均为1mm的钢丝绳。在绞盘的外侧(图中显示的上下两端)各有一个固定钢丝绳用的螺丝,由丝杆5向电机一侧进行观测,钢丝绳分别由螺丝固定后,靠近电机一侧的钢丝绳向对侧逆时针缠绕,靠近丝杆一侧的钢丝绳向对侧顺时针缠绕(两根钢丝绳的缠绕方向可以互换)。两钢丝绳缠绕相同圈数后由绞盘的同侧(图中为上方)分别向两侧接出,一左一右并使两根绳索平行。
上述结构与绕绳方法,在电机旋转过程中,钢丝绳不会卷在一起或者发生侧向偏移,避免了旋转半径变化和侧向偏移对弹簧的弹性形变造成影响。
在底板靠下的位置与电机轴所在直线垂直安装有一条直线滑轨10和一根磁条13。所述直线滑轨上装有3个技术参数相同的二排滚珠式直线滑块,即第一滑块7、第二滑块8和第三滑块9,3个滑块中间通过2根弹性系数和长度相同的弹簧11相连,如图6所示。在第二滑块8上固定有手柄座6,用于固定手柄16,在第一滑块7和第三滑块9上外侧各固定有一个挂钩14,用于固定钢丝绳15的末端。同时在3个滑块的侧面还分别固定有一个磁栅尺读数头12(共计3个磁栅尺读数头),磁栅尺读数头和磁条配合构成位置测量装置,用于对三个滑块的位置进行实时测量,以得到两根弹簧的形变量,通过计算得到弹簧的弹性力大小,进一步获得人手的位置信息和受力情况。
上述两根钢丝绳在绞盘固定后绕出,分别依次通过第一旋转轴18、第二旋转轴19和第三旋转轴20与第一滑块7或第三滑块9上的挂钩14相连固定,两根绳索的末端分别与直线滑轨平行,如图1和图2所示。
上述旋转轴结构如图8所示(该旋转轴起到介轮的作用,可用滑轮代替)。
该驱动器的动力传动过程为:人手驱动手柄沿直线导轨运动的过程中,电机提供相应的驱动力,驱动绞盘牵引绳索从而改变弹性元件的形变量,使得人手所感知的交互力和阻抗发生改变。通过设计相应的阻抗控制器,实现期望的人机交互柔顺度。
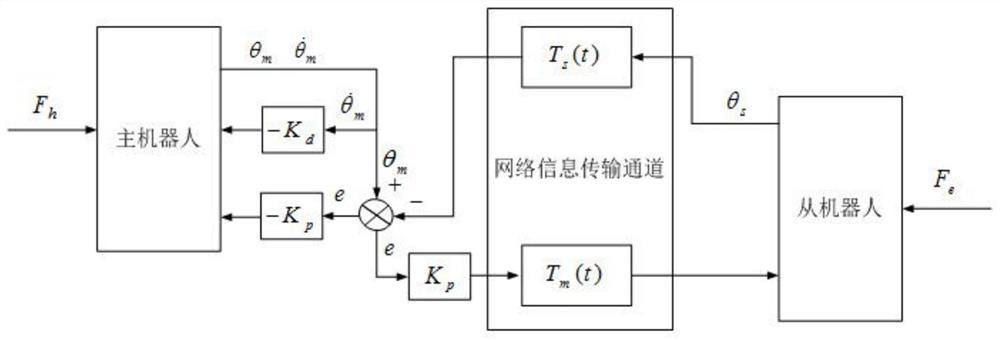
阻抗控制器框图如图9所示,其中:GCSEA为绳牵引串联弹性驱动平台的开环模型,其输入分别为手柄的位移 和电机转速控制命令ωd,输出为人机交互力矩τh。Zd为期望的阻抗模型,τd为期望的力矩。e为力矩跟踪误差,K为阻抗控制器。
τh通过两个弹簧的形变量并根据公式 求得。
其中 为电机端位移,Ks为两个弹簧的等效刚度。
综上所述,本实用新型的结构设计,基于绳牵引串联弹性驱动的方法,实现了柔顺、安全、稳定的物理性人机交互。
一种基于绳牵引串联弹性驱动的物理性人机交互平台专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0