







专利摘要
本发明公开的一种基于介电弹性体的液体变焦成像方法及系统,属于光学成像领域。本发明通过在平面介电弹性体的电极区域内施加电压,带动柔性空心圆台的底部半径发生变化,使得包括液体高度,半径以及弓高等液体形状参数发生变化,从而改变液体透镜的焦距。通过优化系统参数,使得驱动前后液体透镜的焦点位置之差在成像系统的半焦深内时,实现单个驱动的单个液体透镜的变焦成像,具有驱动结构简单、变焦范围大、响应速度快、体积小、成本低等优点。本发明通过平面介电弹性体和柔性空心圆台组合实现变焦成像功能,柔性空心圆台对厚度无特殊要求,无需使用介电弹性材料,仅平面介电弹性使用介电弹性材料,且平面介电弹性体易加工。
权利要求
1.一种基于介电弹性体的液体变焦成像方法,其特征在于:平面介电弹性体贴附于柔性空心圆台底面;柔性空心圆台的底部粘贴于平面介电弹性体的中心区域,通过驱动平面介电弹性体变形,带动柔性空心圆台的底部半径发生变化,在柔性空心圆台中注入液体,在平面介电弹性体的上下两个表面的外围区域涂有柔性电极,当两个柔性电极具有电压差时,平面介电弹性体涂有电极的区域面积将增加,驱动柔性空心圆台的底部收缩,底部半径减小,进而使得柔性空心圆台内的液体形状发生变化,所述形状包括液体高度,半径以及弓高,从而改变液体透镜的焦距;当液体透镜焦距改变且驱动前后液体透镜的焦点位置之差在成像系统的半焦深内时,成像系统能够清晰地改变成像大小,实现单个驱动的单个液体透镜的变焦成像功能,具有变焦范围大、响应速度快、体积小、成本低、驱动简单的优点;
通过平面介电弹性体和柔性空心圆台组合实现变焦成像功能,柔性空心圆台对厚度无特殊要求,无需使用介电弹性材料,仅平面介电弹性体使用介电弹性材料,且平面介电弹性体易加工,因此,平面介电弹性体和柔性空心圆台组合易于加工。
2.一种基于介电弹性体的液体变焦成像系统,用于实现如权利要求1所述的一种基于介电弹性体的液体变焦成像方法,其特征在于:包括固定透明平板(1)、柔性空心圆台(2)、液体(3)、空心圆柱(4)、上固定板(5)、平面介电弹性体(6)、上柔性电极(7)、下柔性电极(8)、下固定板(9)、电源(10);上固定板(5)和下固定板(9)用于固定平面介电弹性体(6),在平面介电弹性体(6)的外围区域的上下表面分布均匀涂有上柔性电极(7)和下柔性电极(8),中心区域的半径为柔性空心圆台(2)的底部半径,上柔性电极电气连接于电源(10),下柔性电极(8)电气连接于地端;柔性空心圆台(2)的底部粘贴于平面介电弹性体(6)的中心区域;空心圆柱(4)粘于上固定板(5);在柔性空心圆台(2)内注入液体(3),柔性空心圆台(2)的顶部粘于固定透明平板(1)。
3.如权利要求2所述的一种基于介电弹性体的液体变焦成像系统,其特征在于:工作方法为,
步骤一:当电源(10)的开关断开时,由于上柔性电极(7)和下柔性电极(8)没有电压差,平面介电弹性体(6)未被驱动,此时柔性空心圆台的底部(11)的半径为a
平面介电弹性体(6)驱动前的液体透镜焦距f
入射平行光线在经过介电弹性体驱动前的液体表面(15)的作用后,驱动前的汇聚光线(17)聚焦在驱动前的焦点(19)位置上;
步骤二:当电源(10)的开关闭合时,由于上柔性电极(7)和下柔性电极(8)有电压差,平面介电弹性体(6)被驱动,平面介电弹性体(6)涂有电极的区域面积将增加,带动柔性空心圆台的底部(11)收缩,其半径将变为a
其中θ为液体-柔性空心圆台的接触角;由于驱动后液体的高度、液体半径以及液体弓高发生变化,入射平行光线在经过介电弹性体驱动后的液体表面的作用后,驱动后的汇聚光线聚焦在驱动后的焦点位置上;驱动后的焦距也将发生变化,变化后的液体透镜焦距f
其中:f
为了使得液体透镜能够实现变焦成像,驱动前后液体透镜的焦点位置之差应在成像系统的半焦深内,即
其中δ为成像系统的焦深;在满足式(5)后,能够保证系统能够较清晰成像,此时液体透镜的变倍比为:
通过优化柔性空心圆台的结构参数和液体的初始形状,得到不同变倍比的液体透镜变焦,因此,通过在介电弹性体上施加电压,实现单个驱动实现单个液体透镜大范围快速变焦功能,而且所述柔性空心圆台对厚度无特殊要求,通过3D打印或者两次注塑工艺加工得到,具有易加工的优点。
4.如权利要求3所述的一种基于介电弹性体的液体变焦成像系统,其特征在于:还包括步骤三,
根据不同的变焦应用需求,液体透镜(3)应具有不同的焦距;当液体透镜(3)具有长焦距和短焦距时,为了减小变焦成像系统的长度,需要采用不同的相机结构方式配合液体透镜(3)完成变焦成像;在不同液体透镜(3)的焦距下,所述一种基于介电弹性体的液体变焦成像系统的成像方式包括方式一和方式二:
方式一:当柔性空心圆台(2)内的液体透镜(3)具有长的焦距时,采用包括凹透镜(22)、第一凸透镜(23)、图像传感器(24)在内的相机(25)结构,其中液体透镜(3)的像方焦点和凹透镜(22)的像方焦点重合;从无穷远目标(21)发出的入射平行光线(14)在经过柔性空心圆台(2)内的液体透镜(3)的汇聚后,然后经过凹透镜(22)的作用变为平行光线,最后经过第一凸透镜(23)聚焦后成像在图像传感器(24)上;
方式二:当柔性空心圆台(2)内的液体透镜(3)具有短的焦距时,采用包括第二凸透镜(26)、第一凸透镜(23)、图像传感器(24)在内的相机(25)结构,其中液体透镜(3)的像方焦点和凹透镜(22)的物方焦点重合;从无穷远目标(21)发出的入射平行光线(14)在经过柔性空心圆台(2)内的液体透镜(3)的汇聚后,然后经过第二凸透镜(26)的作用变为平行光线,最后经过第一凸透镜(23)聚焦后成像在图像传感器(24)上。
说明书
技术领域
本发明涉及一种基于介电弹性体的液体变焦成像方法及系统,属于光学成像领域。
背景技术
变焦成像系统广泛应用于工业、医疗、军事、生活等各个领域,由于液体透镜具有体积小、结构简单、速度快、偏振无关性、寿命长等优点,目前人们已经将液体透镜应用于变焦成像系统。现有的液体透镜变焦成像方法主要包括固体透镜和液体透镜结合、多个液体透镜、多驱动单元的单个液体透镜等方式。固体透镜和液体透镜结合的方式由于一般需要多个固体透镜,因此系统结构和装配复杂。多个液体透镜的方式虽然省去了固体透镜,然而由于需要多个液体透镜,成本较高且和控制过程复杂。多驱动单元的单个液体透镜的方式虽然只需要单个液体透镜,然而由于需要多个包括电润湿、电磁驱动等在内的驱动单元,因此驱动单元结构上和控制上较为复杂。为了减小变焦系统体积、成本本以及控制复杂性,人们希望在单个液体透镜基础上,通过单个驱动单元即可实现变焦成像。专利“一种单驱动液体变焦透镜及其制作方法、变焦成像方法”(申请号CN202010090689.7)公开了一种单驱动液体变焦透镜实现变焦的成像方法,该方法也采用介电弹性体作为驱动单元,但是该方法是将介电弹性体材料设计为圆台形薄膜结构,由于圆台形节电弹性体薄膜的厚度仅在约几十微米至百微米量级,对目前的加工工艺提出了较高要求,因此为了减小加工难度,亟需提出一种易加工的基于介电弹性体的液体透镜变焦成像方法。
发明内容
本发明公开的一种基于介电弹性体的液体变焦成像方法及系统要解决的技术问题是:利用介电弹性体的变形量大、驱动力大、响应速度快等优点,采用单个介电弹性体实现较大范围、快速的变焦成像,且具有加工难度小、结构简单、控制容易等优点。
本发明的目的是通过下述技术方案实现的。
本发明公开的一种基于介电弹性体的液体变焦成像方法,平面介电弹性体贴附于柔性空心圆台底面。通过驱动平面介电弹性体变形,带动柔性空心圆台的底部半径发生变化,在柔性空心圆台中注入液体,在平面介电弹性体的上下两个表面的外围区域涂有柔性电极,当两个柔性电极具有电压差时,平面介电弹性体涂有电极的区域面积将增加,驱动柔性空心圆台的底部收缩,底部半径减小,进而使得柔性空心圆台内的液体形状发生变化,所述形状包括液体高度,半径以及弓高,从而改变液体透镜的焦距。当液体透镜焦距改变且驱动前后液体透镜的焦点位置之差在成像系统的半焦深内时,成像系统能够较清晰地改变成像大小,实现单个驱动的单个液体透镜的变焦成像功能,具有变焦范围大、响应速度快、体积小、成本低、驱动简单的优点。本发明通过平面介电弹性体和柔性空心圆台组合实现变焦成像功能,柔性空心圆台对厚度无特殊要求,无需使用介电弹性材料,仅平面介电弹性使用介电弹性材料,且平面介电弹性体易加工,因此,平面介电弹性体和柔性空心圆台组合易于加工。
本发明公开的一种基于介电弹性体的液体变焦成像系统,用于实现所述一种基于介电弹性体的液体变焦成像方法,包括固定透明平板、柔性空心圆台、液体、空心圆柱、上固定板、平面介电弹性体、上柔性电极、下柔性电极、下固定板、电源。平面介电弹性体为易于加工的平面介电弹性体,上固定板和下固定板用于固定平面介电弹性体,在平面介电弹性体的外围区域的上下表面分布均匀涂有上柔性电极和下柔性电极,中心区域的半径为柔性空心圆台的底部半径,上柔性电极电气连接于电源,下柔性电极电气连接于地端。柔性空心圆台的底部粘贴于平面介电弹性体的中心区域。空心圆柱粘于上固定板。在柔性空心圆台内注入液体,柔性空心圆台的顶部粘于固定透明平板。
为了获得大变焦比和变焦速度,作为优选,平面介电弹性体材料为预拉伸的VHB4910、VHB4905或PDMS。
为了获得大变焦比,作为优选,所述柔性空心圆台材料为PDMS、类橡胶材料。
为了减小加工难度,作为优选,所述柔性空心圆台通过3D打印或者两次注塑工艺加工得到。
为了减小加工难度,作为优选,柔性空心圆台的底部通过等离子体氧化工艺粘贴于平面介电弹性体的中心区域。
为了获得大变焦比,作为优选,液体材料为甘油和水的混合溶液。
为了减小加工难度,作为优选,上柔性电极和下柔性电极材料为碳膏、碳纳米管、炭粉。
为了便于与VHB4910、VHB4905或PDMS粘贴,作为优选,上固定板、下固定板的材料优选亚克力材料。
本发明公开的一种基于介电弹性体的液体变焦成像系统的工作方法,包括如下步骤:
步骤一:当电源的开关断开时,由于上柔性电极和下柔性电极没有电压差,平面介电弹性体未被驱动,此时柔性空心圆台的底部的半径为a1,柔性空心圆台的顶部的半径为b,柔性空心圆台的高度为h。柔性空心圆台内注入液体,平面介电弹性体驱动前的液体表面的高度为h0,半径为r0,弓高s0,此时液体的体积V表述为:
平面介电弹性体驱动前的液体透镜焦距f0表示为:
入射平行光线在经过介电弹性体驱动前的液体表面的作用后,驱动前的汇聚光线聚焦在驱动前的焦点位置上。
步骤二:当电源的开关闭合时,由于上柔性电极和下柔性电极有电压差,平面介电弹性体被驱动,平面介电弹性体涂有电极的区域面积将增加,带动柔性空心圆台的底部收缩,其半径将变为a0。由于柔性空心圆台的顶部被固定透明平板固定,因此柔性空心圆台的圆锥角将发生变化,导致驱动后的液体表面的形状发生变化,其液体高度变为h1,液体半径变为r1,液体弓高变为s1。由于液体体积不变和液体-柔性空心圆台的接触角不变,同时根据三角几何关系,当柔性空心圆台的底部变为a0时,驱动后的液体高度、液体半径以及液体弓高三个参数通过式(3)计算得到。
其中θ为液体和柔性空心圆台的接触角。由于驱动后液体的高度、液体半径以及液体弓高发生变化,入射平行光线在经过介电弹性体驱动后的液体表面的作用后,驱动后的汇聚光线聚焦在驱动后的焦点位置上。驱动后的焦距也将发生变化,变化后的液体透镜焦距f1为:
其中:f1为变化后的液体透镜焦距。
为了使得液体透镜能够实现变焦成像,驱动前后液体透镜的焦点位置之差应在成像系统的半焦深内,即
其中δ为成像系统的焦深。在满足式(5)后,能够保证系统能够较清晰成像,此时液体透镜的变倍比为:
通过优化柔性空心圆台的结构参数和液体的初始形状,得到不同变倍比的液体透镜变焦,因此,通过在介电弹性体上施加电压,实现单个驱动实现单个液体透镜大范围快速变焦功能,而且所述柔性空心圆台对厚度无特殊要求,通过3D打印或者两次注塑工艺加工得到,具有易加工的优点。
步骤三:根据不同的变焦应用需求,液体透镜应具有不同的焦距。当液体透镜具有长焦距和短焦距时,为了减小变焦成像系统的长度,需要采用不同的相机结构方式配合液体透镜完成变焦成像。在不同液体透镜的焦距下,所述一种基于介电弹性体的液体变焦成像系统的成像方式包括方式一和方式二:
方式一:当柔性空心圆台内的液体透镜具有长的焦距时,采用包括凹透镜、凸透镜、图像传感器在内的相机结构,其中液体透镜的像方焦点和凹透镜的像方焦点重合。从无穷远目标发出的入射平行光线在经过柔性空心圆台内的液体透镜的汇聚后,然后经过凹透镜的作用变为平行光线,最后经过凸透镜聚焦后成像在图像传感器上。
方式二:当柔性空心圆台内的液体透镜具有短的焦距时,采用包括凸透镜、凸透镜、图像传感器在内的相机结构,其中液体透镜的像方焦点和凹透镜的物方焦点重合。从无穷远目标发出的入射平行光线在经过柔性空心圆台内的液体透镜的汇聚后,然后经过凸透镜的作用变为平行光线,最后经过凸透镜聚焦后成像在图像传感器上。
有益效果:
1、本发明公开的一种基于介电弹性体的液体变焦成像方法及系统,通过在平面介电弹性体的电极区域内施加电压,带动柔性空心圆台的底部半径发生变化,进而使得包括液体高度,半径以及弓高等液体形状参数发生变化,从而改变液体透镜的焦距。通过优化系统参数,使得驱动前后液体透镜的焦点位置之差在成像系统的半焦深内时,实现单个驱动的单个液体透镜的变焦成像,具有驱动结构简单、变焦范围大、响应速度快、体积小、成本低等优点。
2、本发明公开的一种基于介电弹性体的液体变焦成像方法及系统,平面介电弹性体贴附于柔性空心圆台底面,通过驱动平面介电弹性体变形,带动柔性空心圆台的底部半径发生变化,即通过平面介电弹性体和柔性空心圆台组合实现变焦成像功能,柔性空心圆台无需用使用介电弹性材料,仅平面介电弹性体使用介电弹性材料,平面形状使平面介电弹性体易加工,因此,平面介电弹性体和柔性空心圆台组合易于加工。
3、本发明公开的一种基于介电弹性体的液体变焦成像方法及系统,对柔性空心圆台的厚度无特殊要求,避免加工厚度约几十微米至百微米量级的圆台形节电弹性体薄膜的难题,采用3D打印或者两次注塑等成熟工艺加工即能够得到,具有加工难度小的优点。
附图说明
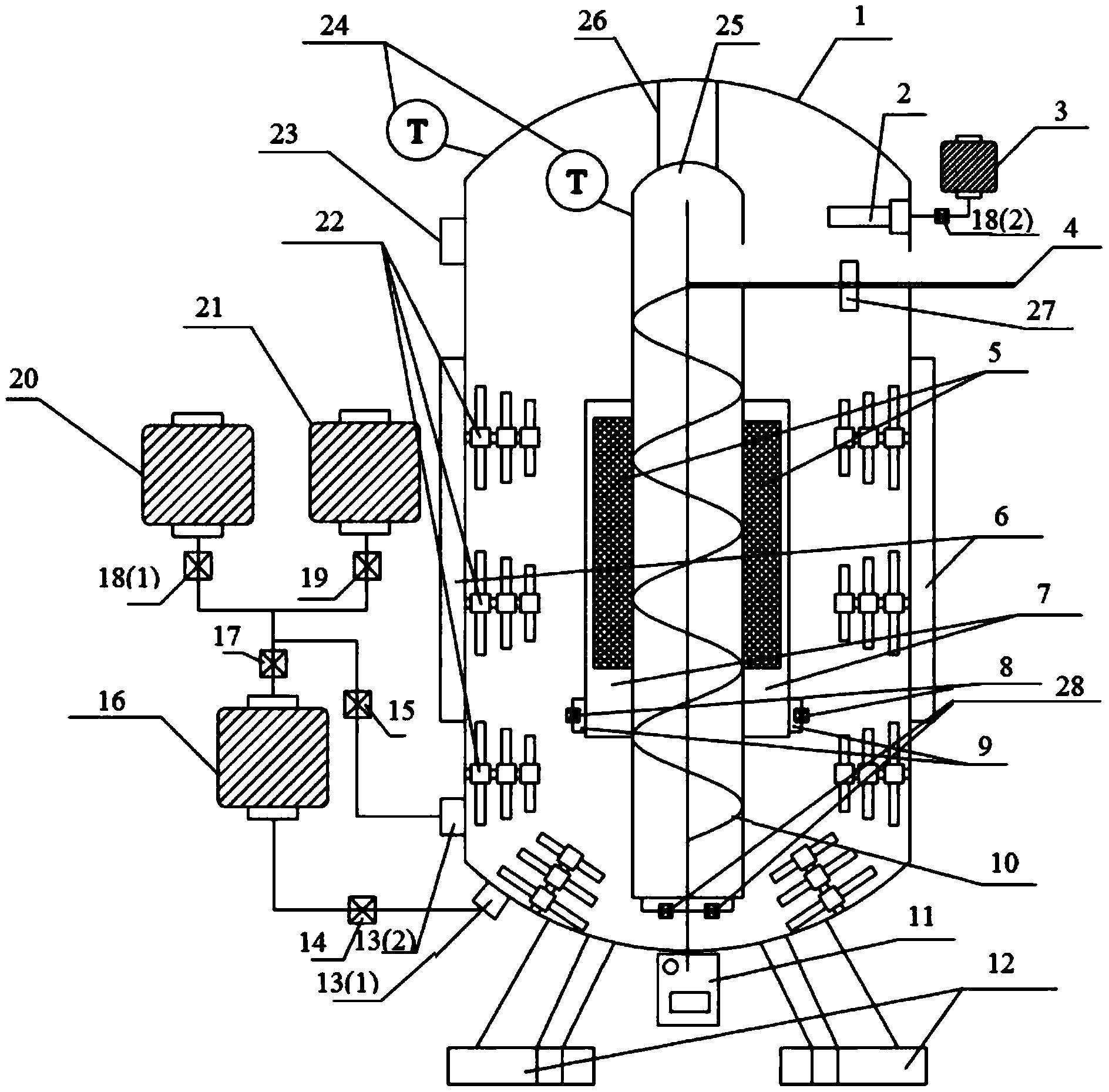
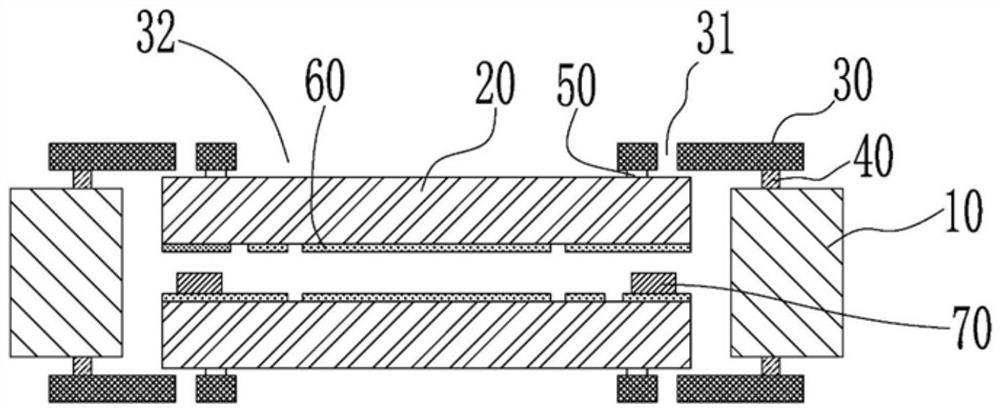
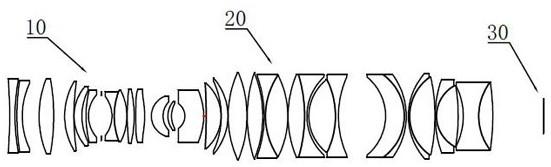
图1为本发明公开的一种基于介电弹性体的液体变焦成像系统的爆炸图。
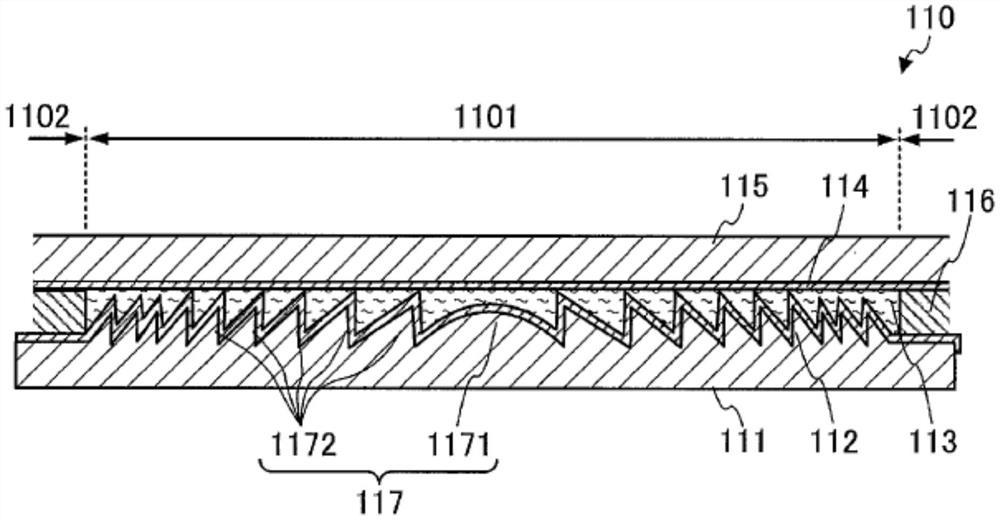
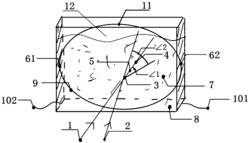
图2为本发明公开的一种基于介电弹性体的液体变焦成像系统的横截面图。
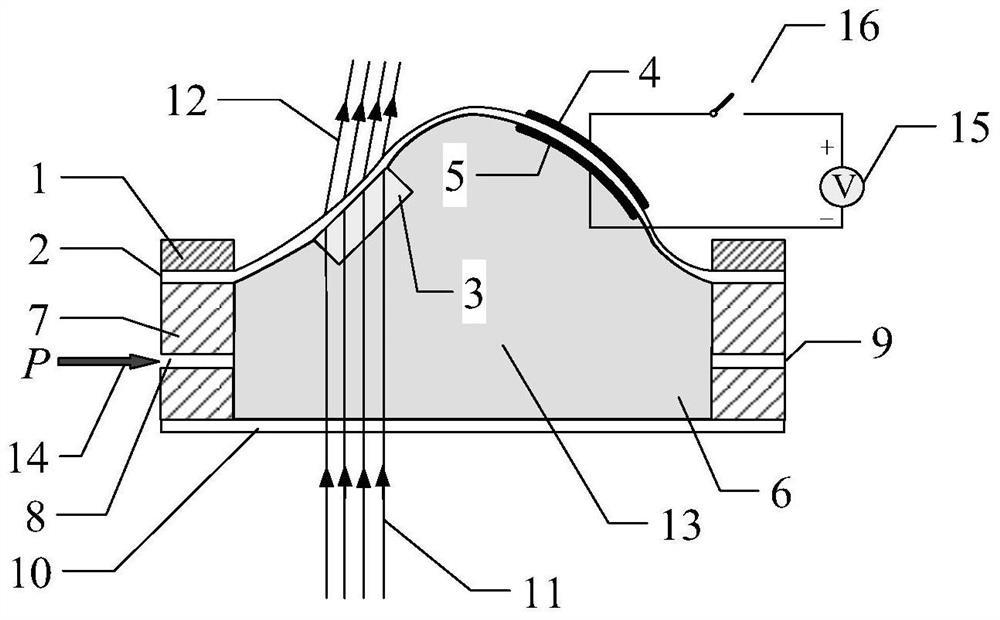
图3为本发明公开的一种基于介电弹性体的液体变焦成像系统的工作原理图。
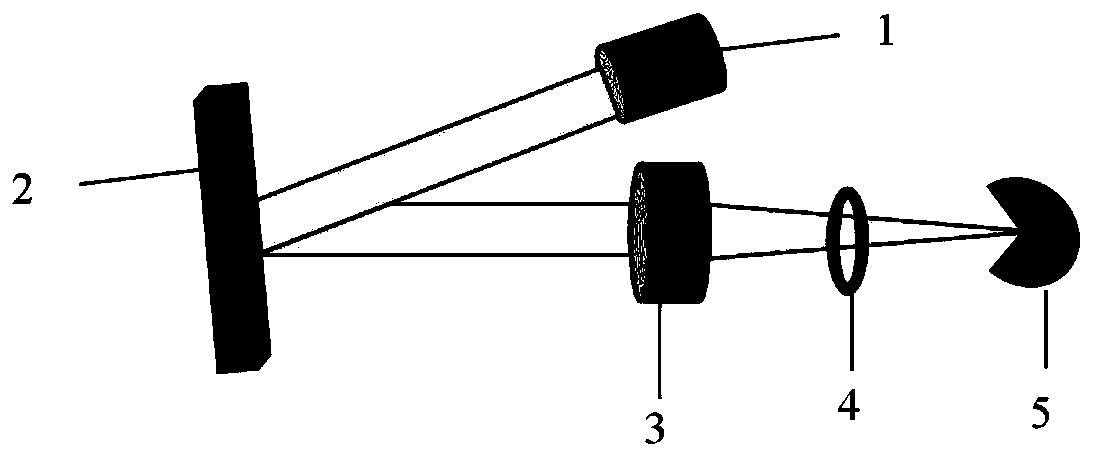
图4为本发明公开的一种基于介电弹性体的液体变焦成像系统的成像示意图(液体透镜焦距较长)。
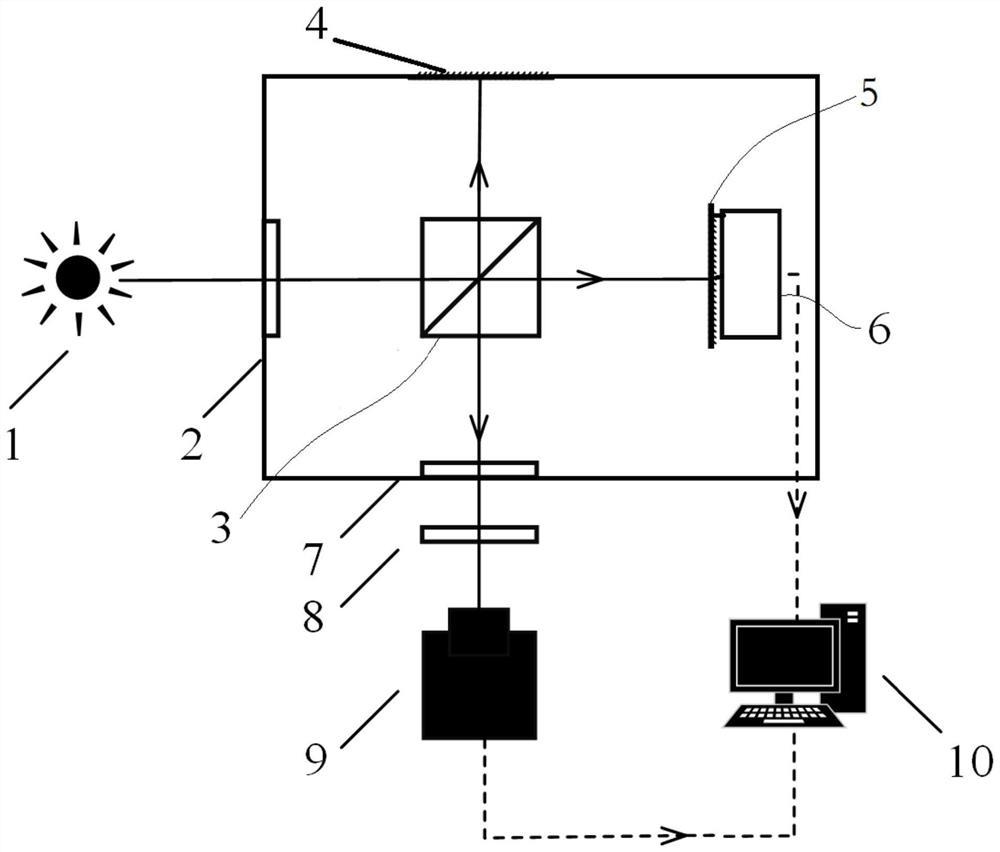
图5为本发明公开的一种基于介电弹性体的液体变焦成像系统的成像示意图(液体透镜焦距较短)。
其中:1-固定透明平板、2-柔性空心圆台、3-液体、4-空心圆柱、5-上固定板、6-介电弹性体、7-上柔性电极、8-下柔性电极、9-下固定板、10-电源、11-柔性空心圆台的底部、12-柔性空心圆台的顶部、13-柔性空心圆台的高度、14-入射平行光线、15-驱动前的液体表面、16-驱动后的液体表面、17-驱动前的汇聚光线、18-驱动后的汇聚光线、19-驱动前的焦点、20-驱动后的焦点、21-无穷远目标、22-凹透镜、23-凸透镜、24-图像传感器、25-相机、26-凸透镜。
应该理解上上述附图只是示意性的,并没有按比例绘制。
具体实施方式
以下结合附图对本发明的具体实施方式进行说明。
如图1、图2所示,本实施例公开的一种基于介电弹性体的液体变焦成像系统,包括固定透明平板1、柔性空心圆台2、液体3、空心圆柱4、上固定5、平面介电弹性体6、上柔性电极7、下柔性电极8、下固定板9、电源10。上固定5和下固定板9用于固定平面介电弹性体6,在平面介电弹性体6的外围区域的上下表面分布均匀涂有上柔性电极7和下柔性电极8,中心区域的半径为柔性空心圆台2的底部半径,上柔性电极电气连接于电源10,下柔性电极8电气连接于地端。柔性空心圆台2的底部通过等离子体氧化工艺粘贴于平面介电弹性体6的中心区域。空心圆柱4通过粘性胶粘于上固定板5。在柔性空心圆台2内注入一定体积的液体3,柔性空心圆台2的顶部通过粘性胶粘于固定透明平板1。
平面介电弹性体6材料为预拉伸的VHB4910。
所述柔性空心圆台2材料为PDMS。
所述柔性空心圆台2通过3D打印得到。
柔性空心圆台2的底部通过等离子体氧化工艺粘贴于平面介电弹性体6的中心区域。
液体3材料为甘油和水的混合溶液。
上柔性电极7和下柔性电极8材料为碳膏。
为了便于与VHB4910,上固定板5、下固定板9的材料优选亚克力材料。
如图3所示,本实施例公开的一种基于介电弹性体的液体变焦成像方法的工作方法,包括如下步骤:
步骤一:当电源10的开关断开时,由于上柔性电极7和下柔性电极8没有电压差,平面介电弹性体6未被驱动,此时柔性空心圆台的底部11的半径为a1,柔性空心圆台的顶部12的半径为b,柔性空心圆台的高度13为h。柔性空心圆台2内注入液体3,平面介电弹性体6驱动前的液体表面15的高度为h0,半径为r0,弓高s0,此时液体3的体积V表述为:
平面介电弹性体6驱动前的液体透镜焦距f0表示为:
入射平行光线在经过介电弹性体驱动前的液体表面15的作用后,驱动前的汇聚光线17聚焦在驱动前的焦点19位置上。
步骤二:当电源10的开关闭合时,由于上柔性电极7和下柔性电极8有电压差,平面介电弹性体6被驱动,平面介电弹性体6涂有电极的区域面积将增加,带动柔性空心圆台的底部11收缩,其半径将变为a0。由于柔性空心圆台的顶部12被固定透明平板固定,因此柔性空心圆台2的圆锥角将发生变化,导致驱动后的液体表面16的形状发生变化,其液体高度变为h1,液体半径变为r1,液体弓高变为s1。由于液体3体积不变和液体3-柔性空心圆台2的接触角不变,同时根据三角几何关系,当柔性空心圆台的底部11变为a0时,驱动后的液体高度、液体半径以及液体弓高三个参数通过式(3)计算得到。
其中θ为液体3和柔性空心圆台2的接触角。由于驱动后液体3的高度、液体半径以及液体弓高发生变化,入射平行光线在经过介电弹性体驱动后的液体表面16的作用后,驱动后的汇聚光线18聚焦在驱动后的焦点20位置上。驱动后的焦距也将发生变化,变化后的液体透镜焦距f1为:
其中:f1为变化后的液体透镜焦距。
为了使得液体透镜能够实现变焦成像,驱动前后液体透镜的焦点位置之差应在成像系统的半焦深内,即
其中δ为成像系统的焦深。在满足式(5)后,能够保证系统能够较清晰成像,此时液体透镜的变倍比为:
通过优化柔性空心圆台2的结构参数和液体3的初始形状,得到不同变倍比的液体透镜变焦,因此,通过在介电弹性体上施加电压,实现单个驱动实现单个液体透镜大范围快速变焦功能,而且所述柔性空心圆台2对厚度无特殊要求,通过3D打印或者两次注塑工艺加工得到,具有易加工的优点。
步骤三:根据不同的变焦应用需求,液体透镜3应具有不同的焦距。当液体透镜3具有长焦距和短焦距时,为了减小变焦成像系统的长度,需要采用不同的相机结构方式配合液体透镜3完成变焦成像。在不同液体透镜3的焦距下,所述一种基于介电弹性体的液体变焦成像系统的成像方式包括方式一和方式二:
如图4所示,方式一:当柔性空心圆台2内的液体透镜3具有长的焦距时,采用包括凹透镜22、凸透镜23、图像传感器24在内的相机25结构,其中液体透镜3的像方焦点和凹透镜22的像方焦点重合。从无穷远目标21发出的入射平行光线14在经过柔性空心圆台2内的液体透镜3的汇聚后,然后经过凹透镜22的作用变为平行光线,最后经过凸透镜23聚焦后成像在图像传感器24上。
如图5所示,方式二:当柔性空心圆台2内的液体透镜3具有短的焦距时,采用包括凸透镜26、凸透镜23、图像传感器24在内的相机25结构,其中液体透镜3的像方焦点和凹透镜22的物方焦点重合。从无穷远目标21发出的入射平行光线14在经过柔性空心圆台2内的液体透镜3的汇聚后,然后经过凸透镜26的作用变为平行光线,最后经过凸透镜23聚焦后成像在图像传感器24上。
综上所述,相比较传统方法,本实施例采用具有单个驱动单元的单个液体透镜即能够实现变焦成像,通过平面介电弹性体和柔性空心圆台组合实现变焦成像功能,柔性空心圆台无需用使用介电弹性材料,仅平面介电弹性体使用介电弹性材料,平面形状使平面介电弹性体易加工,因此,平面介电弹性体和柔性空心圆台组合易于加工;此外,本实施例对柔性空心圆台的厚度和材料无特殊要求,避免加工厚度约几十微米至百微米量级的圆台形薄膜的工艺难题,同时消除需要介电弹性体材料的限制,具有易加工、变焦范围大、响应速度快、体积小、成本低、驱动简单的优点。
以上所述的具体描述,对发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
一种基于介电弹性体的液体透镜变焦成像方法及系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0