





专利摘要
本实用新型公开了一种废旧汽车拆解固定用智能夹具,包括伸缩吊臂、下垂式夹具和智能视觉控制系统;本实用新型的废旧汽车拆解固定用智能夹具可以将废旧汽车在环形轨道的五个工位上依次停留且产生不同的高度与角度,便于汽车在不同高度和角度进行拆解,从而可以简化拆解生产布局,使场地紧凑、安全环保、降低工人劳动复杂程度,缩短拆解周期,最大限度的实现报废汽车的价值,提高回收效率。
权利要求
1.一种废旧汽车拆解固定用智能夹具,其特征在于,包括上下伸缩吊臂、下垂式夹具和智能视觉控制系统;
所述伸缩吊臂由固定支架、上平板、上下伸缩吊臂和下平板组成;所述上平板通过设置在固定支架上的滚动轮固定在环形轨道上;所述上下伸缩吊臂上端与上平板固定,下端与下平板固定,上下伸缩吊臂上下伸缩时,上平板固定不动,下平板带动下垂式夹具做上升下降运动;
所述下垂式夹具由驱动齿轮、驱动电机、右回转体、右Y型夹具、固定条、固定转轴、滚动支撑轮、左回转体和左Y型夹具组成;所述固定条一端固定于下平板,另一端与固定转轴连接,固定转轴上设置有滚动支撑轮,驱动电机通过设置在左、右回转体顶部的驱动齿轮带动左、右回转体做环形运动,并通过沟槽相配合,运动过程中不分离;所述左、右回转体中间设置有与滚动支撑轮相配合的环形凹槽,左、右回转体的下部分别设置有左、右Y型夹具;
所述智能视觉控制系统由左摄像机、右摄像机、光源照明,图像处理系统和控制装置组成;所述左、右摄像机分别设置在下平板的左右两侧,所述光源照明设置在下平板的下方。
2.如权利要求1所述的废旧汽车拆解固定用智能夹具,其特征在于,在上平板上设置有驱动与传动机构,所述驱动与传动机构由电机、减速差速机构、半轴和驱动轮组成;电机的动力通过第一级减速机构减速,再通过第二级减速机构减速、差速机构差速后,带动半轴旋转,半轴带动驱动轮在环形轨道中运行。
3.如权利要求1所述的废旧汽车拆解固定用智能夹具,其特征在于,左右回转体内侧分别制有 和 形状的沟槽,左右回转体通过沟槽形成“H”状镶配一起,保证左、右回转体运转的过程中不分离。
说明书
技术领域
本实用新型属于废旧汽车拆解回收利用技术领域,特别涉及一种固定废旧汽车运动于拆解流水线的智能夹具。
背景技术
随着我国经济的快速发展,机动车保有量达2.9亿辆,其中汽车 1.94亿辆,按照每年大约10%的报废量,仅报废汽车的辆次就接近两千万辆,当汽车报废时,报废拆解企业一直采用传统手工拆解汽车,费时,费力,且影响拆卸的效率。依据《报废汽车回收拆解企业技术规范》(GBZ2128-2008),报废汽车的拆解与回收,最终要形成产业化,必须开发研制符合实际自动化流水线式的报废汽车拆解生产线,为企业所用,为此,我们提出一种固定废旧汽车运动于拆解自动流水线的智能夹具。
实用新型内容
为解决现有技术中废旧汽车拆解时,不能实现自动化的转运到不同的拆解工位的缺陷,本实用新型提供一种废旧汽车拆解固定用智能夹具及其拆解方法。
一种废旧汽车拆解固定用智能夹具,包括伸缩吊臂、下垂式夹具和智能视觉控制系统;
所述伸缩吊臂由固定支架、上平板、上下伸缩吊臂和下平板组成;所述上平板通过设置在固定支架上的滚动轮固定在环形轨道上;所述上下伸缩吊臂上端与上平板固定,下端与下平板固定,液压泵驱动上下伸缩吊臂上下伸缩时,上平板固定不动,下平板带动下垂式夹具做上升下降运动;液压泵可设置在上平板的上方;
所述下垂式夹具由驱动齿轮、驱动电机、右回转体、右Y型夹具、固定条、固定转轴、滚动支撑轮、左回转体和左Y型夹具组成;驱动电机固定于下平板底部,所述固定条一端固定于下平板,另一端与固定转轴连接,固定转轴上设置有滚动支撑轮,驱动电机通过设置在左、右回转体顶部的驱动齿轮带动左、右回转体做环形运动,并通过沟槽相配合,运动过程中不分离;所述左、右回转体中间设置有与滚动支撑轮相配合的环形凹槽,左、右回转体的下部分别设置有左、右Y型夹具;左、右Y型夹具工作时与汽车上部的门框成接触,在左、右回转体环形伸缩运动过程中,左、右Y型夹具对汽车上部的门框形成夹紧力,保证废旧汽车的可靠固定,与整个夹具成一体在环形轨道拆解线中运动翻转,方便拆解。
所述智能视觉控制系统由左摄像机、右摄像机、光源照明,图像处理系统和控制装置组成;所述左、右摄像机分别设置在下平板的左右两侧,所述光源照明设置在下平板的下方;由于不同的废旧汽车,尺寸大小不同、车身结构不同、车身自身重量不同、车身刚度强度不同,通过智能视觉控制系统可以灵活精准的保证智能夹具将废旧汽车夹紧。光源照明提供照明,左、右摄像机对废旧汽车与夹具的运行过程进行实时监控摄像,将被摄取目标转换成图像信号,传送给专用的图像处理系统,图像处理系统对这些信号进行各种运算来抽取目标的特征,再根据内部所存储的程序来进行判别,根据判别的结果控制装置再来控制现场的设备动作和调整。
智能视觉控制系统具有智能控制定位功能、行走功能、升降功能、收缩功能和翻转功能,具体如下:
定位功能:在控制装置的存储单元程序中提前录入市面上现有废旧汽车车型外观尺寸信息,废旧汽车到达指定停放位置后,摄像机对整车进行摄像拍照,以地面水平高度为参考,以汽车车标和车尾天线为基准,确定汽车纵向中心线和汽车车身高度,获取汽车的准确位置,为实现后续行车,升降和翻转奠定基础;
行走功能:环形轨道双线拆解线中设置五大工位,每个工位根据拆解项目,都设置了规定的时间,控制装置根据内部编制程序,控制驱动电机,让夹具固定废旧汽车整体运行在环形轨道中,在每个工位作适时停留,实现废旧汽车轨道行走。
升降功能:以摄像机图像提供的废旧汽车位置信号,控制装置根据程序控制液压泵,从而控制伸缩吊臂工作,能使智能夹具与废旧汽车整体上下运动,实现废旧汽车的上升与下降。
收缩功能:以摄像机图像提供的废旧汽车位置信号,控制装置根据程序控制两驱动电机转向,能使智能夹具两回转体同时扩大张开和同时收缩,实现废旧汽车的夹紧与松开。
翻转功能:以摄像机图像提供的废旧汽车位置信号,控制装置根据程序控制两驱动电机同向旋转,能使智能夹具两回转体同时向同一方向做环形运动,实现废旧汽车的翻转与回正。
环形轨道中设置两条拆解生产线,每条生产线中设置五个拆解工位。
区别汽车的大小,针对小型汽车(车身长度<3.5米)利用一套智能夹具对其B柱前方门框固定;针对大型汽车(车身长度>3.5米) 利用两套智能夹具对其B柱前、后方门框可靠固定后,跟随着驱动与传动部分在环形轨道中做环形运动,在程序控制下,使废旧汽车在运动过程中行走,停留,升降,翻转形成多个拆解工位,使废旧汽车拆解呈流水线拆解。
A号工位:危险部件预处理
位置状态:废旧汽车送至拆解生产线地面工位,汽车车门拆卸完成后,智能夹具下降,两回转体在电机驱动下反向运动,Y形夹具夹紧汽车门框后,伸缩吊臂工作,带动废旧汽车上升,上升至汽车底部距离地面高度为0.3米。
(1)拆卸车轮;拆卸后的轮胎用设备将外胎与轮毂分离。
(2)拆卸危险部件(包含高压蓄电池、普通蓄电池、安全气囊、安全带等),妥善处置易燃易爆部件,并进行无害化处理或交由有资质回收单位处理。
(3)空调制冷剂经种类纯度鉴定后,采用不同回收设备进行回收,并交由专业厂家进行处理。
B号工位:废油液预处理
位置状态:驱动与传动部分带动智能夹具沿环形轨道运动,运动到一定距离后停止,伸缩吊臂工作,带动废旧汽车上升,此时汽车底部距离地面高度为1.0米。
(1)制动液、制冷剂、发动机机油、变速器齿轮油、差速器双曲线齿轮油、液力传动液等各种油液液体被对应真空装置抽吸干净,所有的操作不出现泄漏,贮存条件且符合要求。
(2)减震器油用专用开孔回收装置进行真空回收且贮存。
(3)挡风玻璃清洗液、冷却液的回收后在废水净化系统处理后排放。
(4)汽油、柴油、液化气、天然气等燃料回收;汽油与柴油的回收采用专用回收设备进行分类回收,汽油、柴油油箱回收完成后最后用高压空气冲刷,保证回收彻底;部分残余液化气、天然气用氮气冲刷且进行燃烧,安全环保。
C号工位:总成拆解
位置状态:驱动与传动部分带动智能夹具沿环形轨道运动,运动到一定距离后停止,两回转体在电机驱动下同向运动,带动废旧汽车向右(或向左)侧翻转,此时汽车底部距离地面高度为1.0米且车身向右(或向左)翻转一定角度。
(1)发动机、变速器采用液压剪或常规工具进行拆卸,拆卸后总成交售由零部件再制造企业。
(2)前后桥与悬架采用液压剪或常规工具进行拆卸,前后桥总成交售由零部件再制造企业,悬架系统进行回收处理。
(3)转向机构采用液压剪或常规工具进行拆卸,且交售由零部件再制造企业。
(4)排气管、催化转化器采用液压剪拆卸,催化转化器且交售由专业回收企业进行回收贵金属。
D号工位:外部件拆解
位置状态:驱动与传动部分带动智能夹具沿环形轨道运动,运动到一定距离后停止,两回转体工作,此时废旧汽车反向回转摆正,汽车底部距离地面高度为1.0米。
外部件拆卸:引擎盖、后备箱盖,保险杠、车灯、采用常规无损拆卸,再利用。
E号工位:内部件拆解
位置状态:驱动与传动部分带动智能夹具沿环形轨道运动,运动到一定距离后停止,伸缩吊臂工作,带动废旧汽车下降,此时汽车底部距离地面高度为0.3米。
内部件拆卸:汽车前后玻璃、座椅、地板和内饰件。
废旧汽车经过五大工位拆解后,车壳被叉车送至车身粉碎流水线,压实、粉碎、筛选等进行进一步处理。
进一步的,在上平板上设置有驱动与传动机构,所述驱动与传动机构由电机、减速差速机构、半轴和驱动轮组成;电机的动力通过第一级减速机构减速,再通过第二级减速机构减速、差速机构差速后,带动半轴旋转,半轴带动驱动轮在环形轨道中运行。环形轨道通常通过固定支架牢固固定与车间大梁或车间横梁。
进一步的,左右回转体内侧分别制有 和 形状的沟槽,左右回转体通过沟槽形成“H”状镶配一起,保证左、右回转体运转的过程中不分离。
一种使用废旧汽车拆解固定用智能夹具进行汽车拆解的方法,其特征在于,包括以下步骤:
1)、在环形轨道中设置两条拆解生产线,每条生产线中设置五个拆解工位,依次为A号工位:危险部件预处理、B号工位:废油液预处理、C号工位:总成拆解、D号工位:外部件拆解、E号工位:内部件拆解;
2)、废旧汽车送达拆解流水线智能夹具下方的A工位,智能视觉控制系统通过左摄像机、右摄像机拍照处理计算出汽车的长度确定采用一套或多套智能夹具工作;
3)、智能视觉控制系统根据摄像机左、右摄像机实时监控摄像且传回的信息对汽车定位后,按照指定程序控制驱动电机同时反向转动,左、右回转体同时向外环形张开,当左、右Y型夹具张开角度大于汽车上方汽车门框时电机停止工作;
4)、液压泵驱动伸缩吊臂向下伸缩,智能夹具整体下降,当左、右Y型夹具与汽车门框对齐时,伸缩吊臂停止下降,驱动电机再次反向转动,左、右回转体及其下端的左、右Y型夹具成环形收缩,当左、右Y型夹具与汽车门框接触夹紧后,伸缩吊臂上升,智能夹具与废旧汽车整体离地0.3米,在A号工位进行危险部件预处理;
5)、A工位汽车拆解完成后;由智能夹具的驱动与传动机构带废旧汽车行走至B工位,伸缩吊臂上升,智能夹具与废旧汽车整体离地1.0米,在B工位进行废油液预处理;
6)、废旧汽车行走至C工位,驱动电机同向旋转,左、右回转体同时向同一方向环形运动,废旧汽车在智能夹具的夹持下整体翻转一定角度,完成总成拆解,然后电机驱动电机再将废旧汽车摆正;再根据程序依次行走至D、E工位,直至拆解工位全部结束。
有益效果:本实用新型的废旧汽车拆解固定用智能夹具可以将废旧汽车在环形轨道的五个工位上依次停留且产生不同的高度与角度,便于汽车在不同高度和角度进行拆解,从而可以简化拆解生产布局,使场地紧凑、安全环保、降低工人劳动复杂程度,缩短拆解周期,最大限度的实现报废汽车的价值,提高回收效率。
附图说明
附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
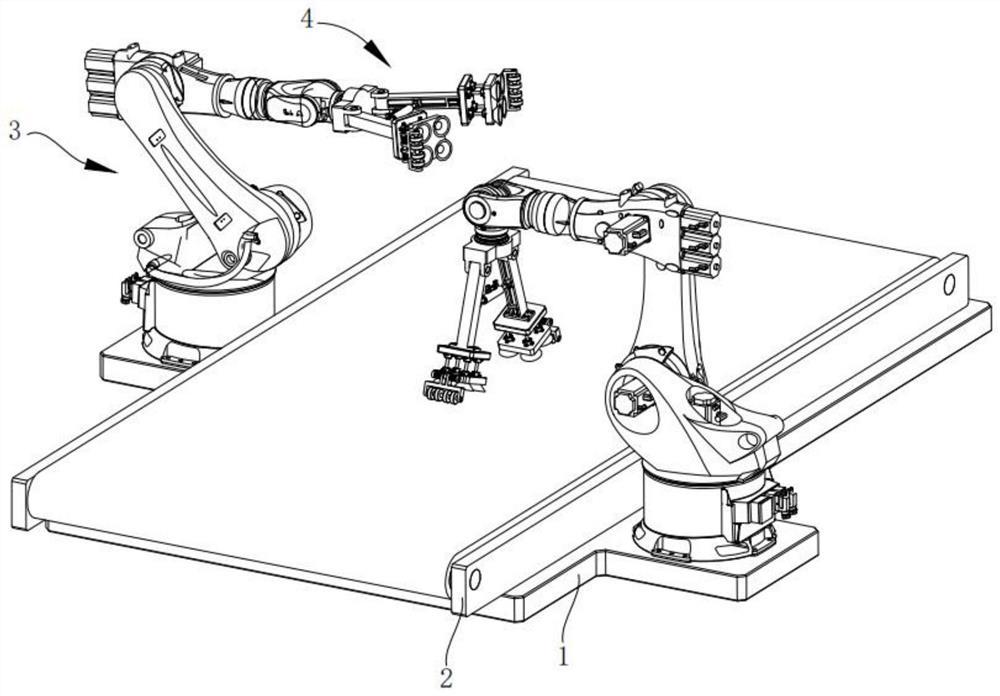
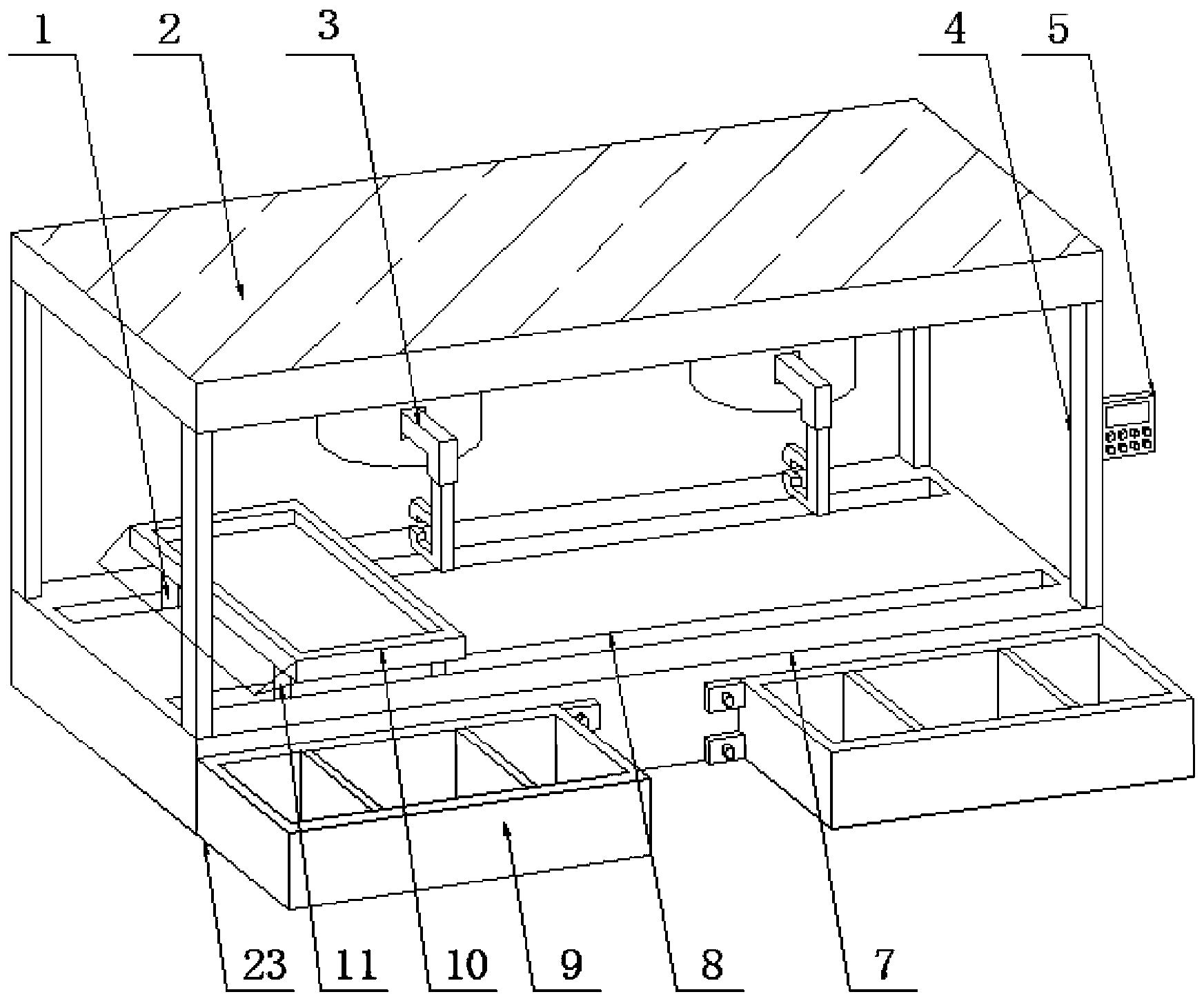
图1:本实用新型实施例总体结构与拆解工位示意图;
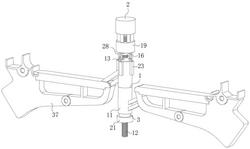
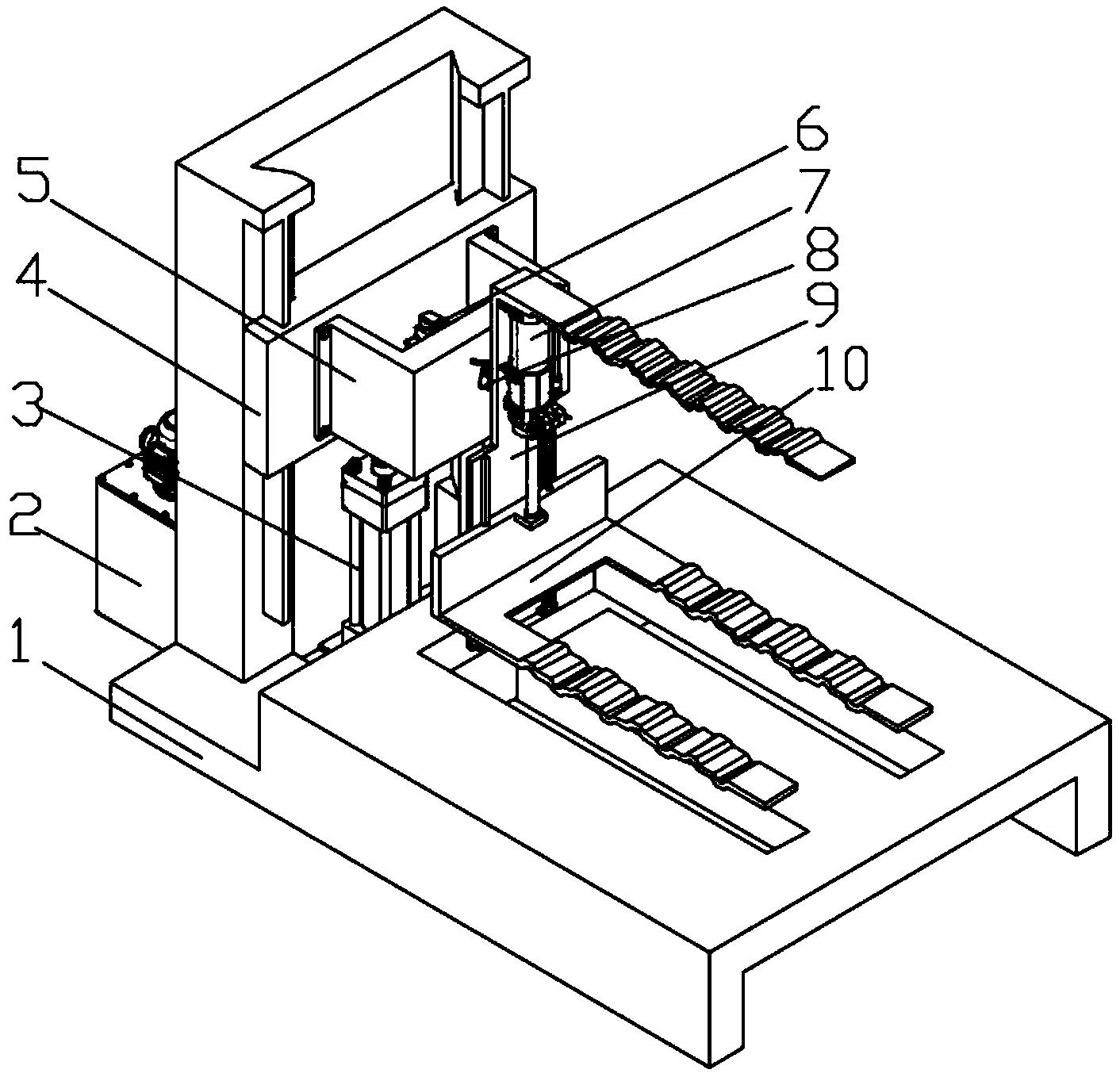
图2:本实用新型实施例总体结构示意图;
图3:本实用新型实施例中驱动与传动部分结构示意图;
图4:本实用新型实施例中伸缩吊臂部分结构示意图;
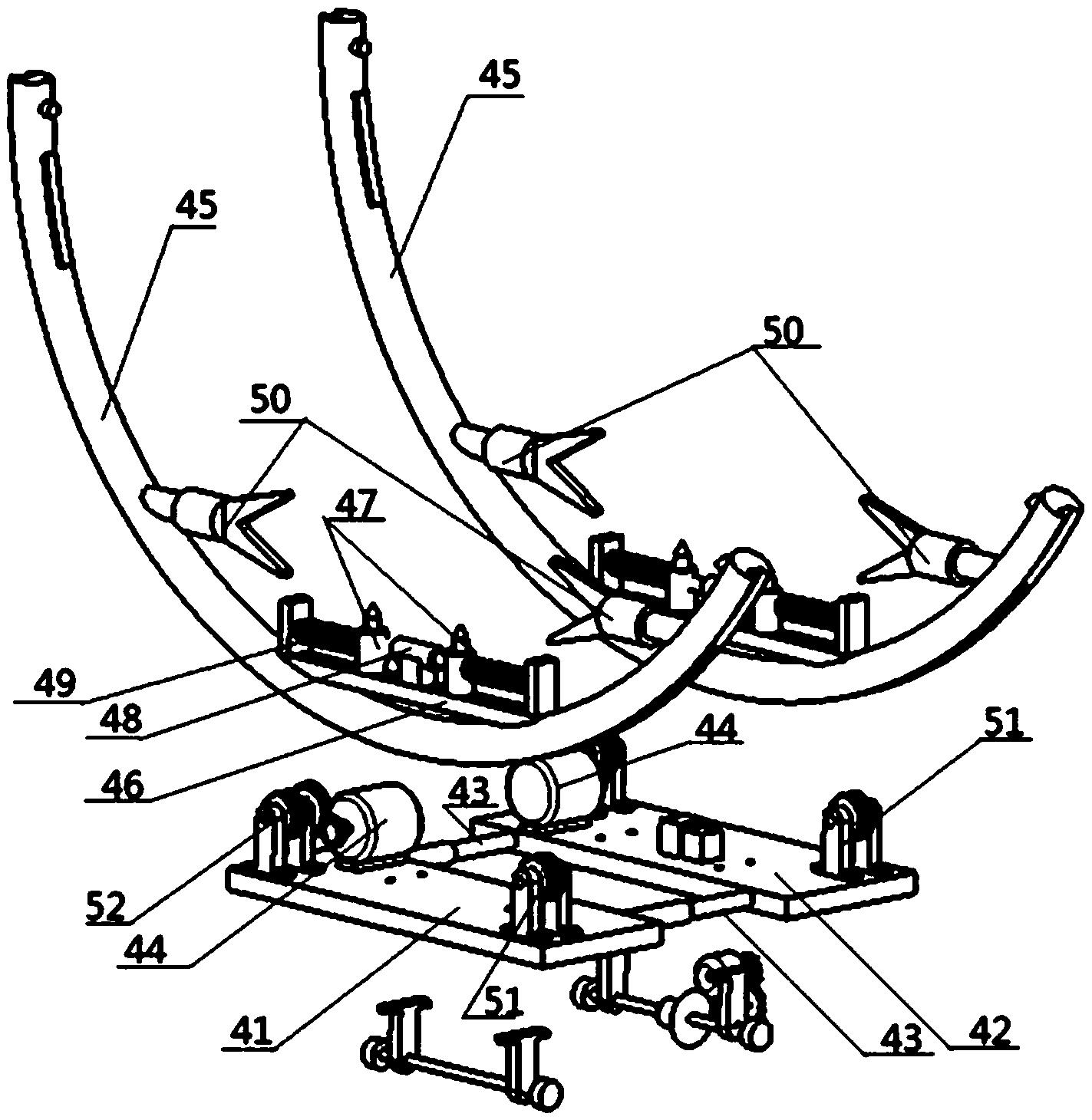
图5:本实用新型实施例中下垂式夹具部分结构示意图;
图6:本实用新型实施例中左右回转体H型啮合结构示意图:
图7:本实用新型实施例中视觉控制部分结构示意图。
具体实施方式
以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
实施例
一种废旧汽车拆解固定用智能夹具,包括伸缩吊臂3、下垂式夹具4和智能视觉控制系统5;
所述伸缩吊臂3由固定支架31、上平板32、上下伸缩吊臂 34和下平板33组成;所述上平板32通过设置在固定支架31上的滚动轮35固定在环形轨道1上;环形轨道1通过固定支架牢固固定与车间大梁或车间横梁。上下伸缩吊臂34上端与上平板32固定,下端与下平板33固定,液压泵驱动上下伸缩吊臂34上下伸缩时,上平板32固定不动,下平板33带动下垂式夹具做上升下降运动;
在上平板32上设置有驱动与传动机构2,所述驱动与传动机构 2由电机21、减速差速机构、半轴25和驱动轮26组成;电机21的动力通过第一级减速机构22减速,再通过第二级减速机构23减速、差速机构24差速后,带动半轴25旋转,半轴25带动驱动轮26在环形轨道1中运行。
下垂式夹具由驱动齿轮41、驱动电机42、右回转体43、右 Y型夹具44、固定条45、固定转轴46、滚动支撑轮47、左回转体 48和左Y型夹具49组成;固定条45一端固定于下平板33,另一端与固定转轴46连接,固定转轴46上设置有滚动支撑轮47,驱动电机42固定于下平板33底部,驱动电机42通过设置在左、右回转体顶部的驱动齿轮41带动左、右回转体做环形运动,并通过沟槽相配合,运动过程中不分离;所述左、右回转体中间设置有与滚动支撑轮47相配合的环形凹槽,左、右回转体的下部分别设置有左、右 Y型夹具;左右回转体内侧分别制有 和 形状的沟槽,左右回转体通过沟槽形成“H”状镶配一起,保证左、右回转体运转的过程中不分离。
所述智能视觉控制系统5由左摄像机54、右摄像机55、光源照明52,图像处理系统53和控制装置51组成;所述左、右摄像机分别设置在下平板33的左右两侧,所述光源照明52设置在下平板 33的下方。光源52具体个数为2个,对称安装于下平台33的下方,提供照明。左、右摄像机54、55对废旧汽车与夹具的运行过程进行实时监控摄像,将被摄取目标转换成图像信号,传送给专用的图像处理系统53,图像处理系统对这些信号进行各种运算来抽取目标的特征,再根据内部所存储的程序来进行判别,根据判别的结果控制装置51精准控制现场的设备动作和调整。
一种使用上述的废旧汽车拆解固定用智能夹具进行汽车拆解的方法,其特征在于,包括以下步骤:
1)、在环形轨道1中设置两条拆解生产线,每条生产线中设置五个拆解工位,依次为A号工位:危险部件预处理、B号工位:废油液预处理、C号工位:总成拆解、D号工位:外部件拆解、E号工位:内部件拆解;
2)、废旧汽车送达拆解流水线智能夹具下方的A工位,智能视觉控制系统5通过左摄像机54、右摄像机55拍照处理计算出汽车的长度确定采用一套或多套智能夹具工作;
3)、智能视觉控制系统5根据摄像机左、右摄像机实时监控摄像且传回的信息对汽车定位后,按照指定程序控制驱动电机42同时反向转动,左、右回转体同时向外环形张开,当左、右Y型夹具张开角度大于汽车上方汽车门框时电机停止工作;
4)、液压泵驱动伸缩吊臂向下伸缩,智能夹具整体下降,当左、右Y型夹具与汽车门框对齐时,伸缩吊臂停止下降,驱动电机42再次反向转动,左、右回转体及其下端的左、右Y型夹具成环形收缩,当左、右Y型夹具与汽车门框接触夹紧后,伸缩吊臂上升,智能夹具与废旧汽车整体离地0.3米,在A号工位进行危险部件预处理;
5)、A工位汽车拆解完成后;由智能夹具的驱动与传动机构 2带废旧汽车行走至B工位,伸缩吊臂上升,智能夹具与废旧汽车整体离地1.0米,在B工位进行废油液预处理;
6)、废旧汽车行走至C工位,驱动电机42同向旋转,左、右回转体同时向同一方向环形运动,废旧汽车在智能夹具的夹持下整体翻转一定角度,完成总成拆解,然后电机驱动电机42再将废旧汽车摆正;再根据程序依次行走至D、E工位,直至拆解工位全部结束。
最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
一种废旧汽车拆解固定用智能夹具专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。




动态评分
0.0