

IPC分类号 : B25J19/00I,B25J5/00I,B60G17/00I,B62D5/04I,B62D61/06I







专利摘要
本发明公开了一种基于三腿的轻载多冗余驱动六自由度并联调姿平台,其包括车体和三个完全相同的六自由度的调姿腿。车体包括底角为70°的等腰三角形方钢框架结构和外侧上下两罩体。锂电池、控制柜布置于框架内,倾角仪位于车底正中,激光测距仪位于3个角上。每个调姿腿包括升降、转向和行走三部分,升降部分的连接板与车体连接,电机经过带传动通过丝杠丝母完成升降动作;转向由齿轮驱动转向轴实现转动;行走则直接由电机驱动,并在这三部分上分别安装了力位传感器。本发明实现了平台的六自由调姿并具有全向运动,大大缩短了以往人工调姿的工作周期,而搭载了机械臂后,使得工作空间提高并更加灵活。
权利要求
1.一种基于三腿的轻载多冗余驱动六自由度并联调姿平台,其特征在于,其包括车体和三个结构相同的六自由度的调姿腿;所述调姿腿为P
所述车体为框架结构,所述框架结构的外侧、上表面以及下表面分别设置有罩体;所述车体上设置有控制组件,所述控制组件容纳在所述框架结构的中间;
三角形车体框架的三个角的侧面方钢结构用来连接定位各调姿腿的L形连接板;所述框架结构的底角为70度的等腰三角形方钢框架;
各调姿腿分别通过L形连接板与车体固定,三个调姿腿以等腰三角形的布局方式对称分布以实现全向运动调姿;每一个调姿腿均包括车轮行走部分、平面转向部分以及与车体垂直的升降部分,车轮行走部分、平面转向部分以及升降部分共同实现调姿腿的六自由度;
所述升降部分包括L形连接板、四个滑块和两个平行导轨、升降驱动电机及升降减速器、同步带和带轮以及丝杠和丝母、位移和力传感器,所述L形连接板用于与车体连接,导轨滑块用于L形连接板和基板间的滑动连接;所述丝母与丝母架连接,丝杠固定在调姿腿基板上,电机通过皮带驱动丝杠转动,实现升降功能;位移和力传感器实时测量所述调姿腿的纵向移动与受力,并传送至控制柜;
所述平面转向部分包括基板、轴承组和转向轴、两个电机及减速器和齿轮组、转向部分转角仪和扭矩传感器,转向轴驱动转向并连接升降部分,转向轴下端设置U形的金属板结构,车轮轴贯穿两板,以实现车轮的全向转动;三个齿轮三轴共面,中间转向大齿轮两侧对称的转向小齿轮分别与两电机连接,中间被动的转向大齿轮与转向轴连接,由此实现车轮转动;转向部分转角仪和扭矩传感器用于测量车轮转动的角度;
所述车轮行走部分包括车轮、行走电机、行走减速器、行走部分扭矩传感器和行走部分转角仪,行走部分扭矩传感器和行走部分转角仪用于测量行进速度和驱动力矩。
2.如权利要求1所述的基于三腿的轻载多冗余驱动六自由度并联调姿平台,其特征在于,所述罩体包括上罩体和下罩体,上罩体覆盖车体的顶部和侧部,下罩体位于车体的底部。
3.如权利要求2所述的基于三腿的轻载多冗余驱动六自由度并联调姿平台,其特征在于,所述控制组件包括锂电池、控制柜、车身倾角仪以及激光测距仪;所述控制柜和锂电池依靠托板设置在车体的框架结构的内部,所述上罩体的三个圆角部分安装了激光测距仪,上罩体的侧面的上下分别固定设置有橡胶防撞条;
所述车身倾角仪设置在下罩体中心点;所述车身倾角仪测量车体的水平方向上的倾斜角度并传给控制柜;所述控制柜收集来自车体及各个调姿腿的多个信号,来控制小车的运行轨迹及调整姿态;安装在车体三个角上的激光测距仪实现了车在全向运动时与环境状况的360度测距,有效防止碰撞发生;所述锂电池与各调姿腿的3个电机和车体上的控制柜相连以提供动力。
4.如权利要求3所述的基于三腿的轻载多冗余驱动六自由度并联调姿平台,其特征在于,所述调姿腿的升降部分的L形连接板下侧连接车体,外侧连接丝母架、套筒传感器、四个滑块和丝母,而与之配合的两个导轨和丝杠固定在基板内侧上;位于基板外侧的升降电机经过了减速器和扭矩传感器通过位于基板的顶部的同步带驱动丝杠转动;位于升降电机两侧的两个转向电机经过了减速器和扭矩传感器连接了两个转向小齿轮,与之啮合的转向大齿轮键连接了转向轴,其底部具有一个U型支座结构;装有车轮与行走部分转角仪的车轮轴贯穿U型支座两侧;U型支座外侧安装了行走电机、行走减速器和行走部分扭矩传感器。
5.如权利要求4所述的基于三腿的轻载多冗余驱动六自由度并联调姿平台,其特征在于,所述调姿腿的平面转向部分包括转向电机、转向减速器、转向小齿轮、转向大齿轮、转向轴、转向部分轴承支座、转向支座、圆螺母、转向部分扭矩传感器和转向部分转角仪;两组转向电机、转向减速器和转向部分扭矩传感器依次相连,其中转向部分扭矩传感器测转向电机的驱动力矩;转向部分扭矩传感器的输出轴与转向小齿轮通过键进行连接,对称分布的转向小齿轮与转向大齿轮啮合,两个转向小齿轮分别带动转向大齿轮正反转,来消除齿轮传动过程中产生的间隙;转向大齿轮与转向轴的上端通过键连接,并用圆螺母对其进行预紧与定位;转向轴支撑固定于两转向部分轴承支座之间,转向支座与基板的外侧固连,转向部分转角仪设于转向轴与轴承支座的接合处,以检测转向轴转过的角度。
6.如权利要求5所述的基于三腿的轻载多冗余驱动六自由度并联调姿平台,其特征在于,所述调姿腿的车轮行走部分包括行走电机、行走减速器、车轮、车轮轴、U型支座、行走部分扭矩传感器和行走部分转角仪;与车轮一体的车轮轴贯穿U型支座的内侧,并与行走部分扭矩传感器连接,支座与传感器之间并设有行走部分转角仪,用于实时检测车轮轴的转角;行走部分扭矩传感器与行走减速器和行走电机依次连接,即电机带动车轮轴进行转动,进而带动车轮运动,实现行走功能,其中行走部分扭矩传感器用以检测行走电机的驱动力矩。
7.如权利要求6所述的基于三腿的轻载多冗余驱动六自由度并联调姿平台,其特征在于,所述车轮行走部分的U型支座上端面与平面转向部分中转向轴的下端焊接,平面转向部分与升降部分均固连于基板之上;升降部分的主动带轮在升降电机的驱动下,带动丝杠进行转动,进而带动丝母和L形连接板实现上升与下降,使得滑块沿Z方向的移动;平面转向部分的转向小齿轮在转向电机的驱动下,带动转向大齿轮实现绕Z轴的转动;车轮行走部分的车轮在行走电机的驱动下,实现绕Y方向的转动;转向大齿轮绕Z轴的转动与车轮行走部分组合实现全向运动;车轮行走部分的车轮在与地面接触时因其可与地面发生相对绕X轴Y轴和Z轴的转动等效形成S副。
说明书
技术领域
本发明涉及智能化装备技术领域,更为具体地本发明涉及一种基于三腿的轻载多冗余驱动六自由度并联调姿平台。
背景技术
随着装配技术的发展与加工作业要求的提高,用于对产品加工的机器人专业分工越来越细,针对性越来越强。而以往待加工的产品对机械手臂操作要求比较简单,对所操作的对象精准操控能力较弱,一般流水线上的串联机械手臂受固定位置影响只能完成较简单的步骤。六自由度并联调姿平台不仅能像一般操作、装卸设备具有提升、移动机械手臂的功能,更具有精确调节操作对象的空间位置和姿态的能力,利用该平台六自由的调姿机械臂平台不再受固定位置限制及机械手臂自身操作空间的限制。随着自动化和智能化技术的发展,机械加工逐渐由原来的工人操作、半机械化操作发展到了机械化操作,并且正在逐步实现全自动化流水线作业的智能化无人工厂。然而在航空工业中的具有代表形的大型飞机的部分大部件加工等操作依然由人工来完成,这种工作方法制造周期长、装配环节多、工艺技术复杂,其可变性、可重构性差,已不能满足现代飞机装配的效能要求。其他各种大型设备如导弹、火箭、卫星等的装配和试验过程中,由于大型装备的零件数量多,外形结构比较复杂,以及加工过程中还具有部件之间协调准确性的要求和外形部分准确度的要求,所以加工劳动力强度大,加工精度要求较高,加工技术难度较大的特点,重要的是,由于这些加工行业产量少、部件大,无法形成现在一般工厂的流水线多个固定位置的机械臂加工的流水线,因此显然需要六自由度并联调姿平台来完成一般的加工机械臂的移动和调姿。
经对现有文献检索发现,目前关于的技术资料主要集中在运输车与调姿平台为两套系统,装置复杂或以运输车为主并具有简单的调姿装置,装配精度较低。中国专利201721567896.7公开了一种工业自动化运输小车,该设备可以完成侧翻动作,然而只能实现小车的卸货功能。中国专利201710180215.X公开了一种基于AGV智能并联机器人的飞机舱门智能安装方法,这种设备虽然具有运输功能并能多轴调姿但调姿系统由六个伸缩杆组成,结构十分复杂占用较大的载重且姿态控制较复杂。中国专利201220133929.8公开了一种三轮足式串并混联机器人,其中运动支链由六个转动关节完成六自由度运动,每个关节具有单独的电机和编码器,结构复杂,完成特定姿态控制较难,且支链全部由转动副连接承载较差,控制精度较低。
综上所述,调姿平台具有运输功能一部分只能完成水平方向的翻转,在一般工厂运行使用中有一定的局限性。而能完成六自由度调姿并具有运输功能的平台,调姿平台与运输系统分离,装置复杂;或每个支链需要控制的自由度较多,且结构复杂。因此需要一个结构简单承载较强并具有较高调姿精度的平台,而本发明则每个支链只需三个控制量的输入即可完成六自由度的支链运动,结构简单,且支链竖直方向升降由丝杠完成,车体由方钢框结构,都具有一定的承载性且平台稳定,调姿精度较高。
发明内容
针对现有技术中的不足之处,本发明的目的在于提出一种基于三腿的轻载多冗余驱动六自由度并联调姿平台,其包括车体和三个完全相同的六自由度的调姿腿。车体包括底角为70°的等腰三角形方钢框架结构和外侧上下两罩体。锂电池、控制柜布置于框架内,倾角仪位于车底正中,激光测距仪位于3个角上。每个调姿腿包括升降、转向和行走三部分,升降部分的连接板与车体连接,电机经过带传动通过丝杠丝母完成升降动作;转向则齿轮驱动转向轴实现转动;行走则直接由电机驱动,并在这三部分上分别安装了力位传感器。本发明实现了平台的六自由调姿并具有全向运动,大大缩短了以往人工调姿的工作周期,而搭载了机械臂后,使得工作空间提高并更加灵活。
具体地,本发明的技术方案如下:
本发明提供一种基于三腿的轻载多冗余驱动六自由度并联调姿平台,其包括车体和三个结构相同的六自由度的调姿腿;所述调姿腿为PzRzRyS
所述车体为框架结构,所述框架结构的外侧、上表面以及下表面分别设置有罩体;所述车体上设置有控制组件,所述控制组件容纳在所述框架结构的中间;
各调姿腿分别通过L形连接板与车体固定,三个调姿腿以等腰三角形的布局方式对称分布以实现全向运动调姿;每一个调姿腿均包括车轮行走部分、平面转向部分以及与车体垂直的升降部分,车轮行走部分、平面转向部分以及升降部分共同实现调姿腿的六自由度。
优选地,所述升降部分包括L形连接板、四个滑块和两个平行导轨、升降驱动电机及升降减速器、同步带和带轮以及丝杠和丝母、位移和力传感器,所述L形连接板用于与车体连接,导轨滑块用于L形连接板和基板间的滑动连接;,所述丝母与丝母架连接,丝杠固定在调姿腿基板上,电机通过皮带驱动丝杠转动,实现升降功能;位移和力传感器实时测量所述调姿腿的纵向移动与受力,并传送至控制柜;
所述平面转向部分包括基板、轴承组和转向轴、两个电机及减速器和齿轮组、转向部分转角仪和扭矩传感器,转向轴驱动转向并连接升降部分,转向轴下端设置U形的金属板结构,车轮轴贯穿两板,以实现车轮的全向转动;三个齿轮三轴共面,中间转向大齿轮两侧对称转向小齿轮分别与两电机连接,中间被动的转向大齿轮与转向轴连接,由此实现车轮转动;转向部分转角仪和扭矩传感器用于测量车轮转动的角度;
所述车轮行走部分包括车轮、行走电机、行走减速器、行走部分扭矩传感器和行走部分转角仪,行走部分扭矩传感器和行走部分转角仪用于测量行进速度和驱动力矩。
优选地,三角形车体框架的三个角的侧面方钢结构用来连接定位各调姿腿的L形连接板。
优选地,所述罩体包括上罩体和下罩体,上罩体位于车体的顶部和侧部,下罩体位于车体的底部。
优选地,所述控制组件包括锂电池、控制柜、车身倾角仪以及激光测距仪;所述控制柜和锂电池依靠托板设置在车体的框架结构的内部,所述上罩体的三个圆角部分安装了激光测距仪,上罩体的侧面的上下分别固定了橡胶防撞条,减缓小车发生碰撞时对车体的伤害;所述车身倾角仪设置在下罩体中心点;所述车身倾角仪测量车体的水平方向上的倾斜角度并传给控制柜;所述控制柜收集来自车体及各个调姿腿的多个信号,来控制小车的运行轨迹及调整姿态;安装在车体三个角上的激光测距仪实现了车在全向运动时与环境状况的360度测距,有效防止碰撞发生;所述锂电池与各调姿腿的3个电机及车体上的控制柜相连以提供动力。
优选地,所述框架结构的底角为70度的等腰三角形方钢框架。
优选地,所述调姿腿的升降部分的L形连接板下侧连接车体,外侧连接丝母架、套筒传感器、四个滑块和丝母,而与之配合的两个导轨和丝杠固定在基板内侧上;位于基板外侧的升降电机经过了减速器和扭矩传感器通过位于基板的顶部的同步带驱动丝杠转动;位于升降电机两侧的两个转向电机经过了减速器和扭矩传感器连接了两个转向小齿轮,与之啮合的转向大齿轮键连接了转向轴,其底部具有一个U型支座结构;装有车轮与行走部分转角仪的车轮轴贯穿U型支座两侧;U型支座外侧安装了行走电机、行走减速器”和行走部分扭矩传感器。
优选地,所述调姿腿的平面转向部分包括转向电机、转向减速器、转向小齿轮、转向大齿轮、转向轴、转向部分轴承支座、转向支座、圆螺母、转向部分扭矩传感器和转向部分转角仪;两组转向电机、转向减速器和转向部分扭矩传感器依次相连,其中转向部分扭矩传感器测转向电机的驱动力矩;转向部分扭矩传感器的输出轴与转向小齿轮通过键进行连接,对称分布的转向小齿轮与转向大齿轮啮合,两个转向小齿轮分别带动转向大齿轮正反转,来消除齿轮传动过程中产生的间隙;转向大齿轮与转向轴的上端通过键连接,并用圆螺母对其进行预紧与定位;转向轴支撑固定于两转向部分轴承支座之间,转向支座与基板的外侧固连,转向部分转角仪设于转向轴与轴承支座的接合处,以检测转向轴转过的角度。
优选地,所述调姿腿的车轮行走部分包括行走电机、行走减速器、车轮、车轮轴、U型支座、行走部分扭矩传感器和行走部分转角仪;与车轮一体的车轮轴贯穿U型支座的内侧,并与行走部分扭矩传感器连接,支座与传感器之间并设有行走部分转角仪,用于实时检测车轮轴的转角;行走部分扭矩传感器与行走减速器和行走电机依次连接,即电机带动车轮轴进行转动,进而带动车轮运动,实现行走功能,其中行走部分扭矩传感器用以检测行走电机的驱动力矩。
优选地,所述车轮行走部分的U型支座上端面与平面转向部分中转向轴的下端焊接,平面转向部分与升降部分均固连于基板之上;升降部分的主动带轮在升降电机的驱动下,带动丝杠进行转动,进而带动丝母和L形连接板实现上升与下降,使得滑块沿Z方向的移动;平面转向部分的转向小齿轮在转向电机的驱动下,带动转向大齿轮实现绕Z轴的转动;车轮行走部分的车轮在行走电机的驱动下,实现绕Y方向的转动;转向大齿轮绕Z轴的转动与车轮行走部分组合实现全向运动;车轮行走部分的车轮在与地面接触时因其可与地面发生相对绕X轴Y轴和Z轴的转动等效形成S副。
与现有技术相比,本发明具有如下优点:
本发明提供的基于三腿的轻载多冗余驱动六自由度并联调姿平台能够以较小空间转向或者向任意方向移动,并能够实现搭载的对接部件六自由度的姿态的调整。每个调姿腿均可实现在垂直方向的伸缩,实现车体纵向的提升和向各个方向的翻转,大大缩短了以往人工对接的工作周期,而搭载了串联机械手臂后,使得工作空间大大提高并使得机械臂的更加机动灵活。
车整体结构更为简单。单个调姿腿可以实现很多的功能,不需要运输和调姿两个设备,使车身结构更为精简,减轻车重,也可为对接部件转场,调姿与运输更加智能。
附图说明
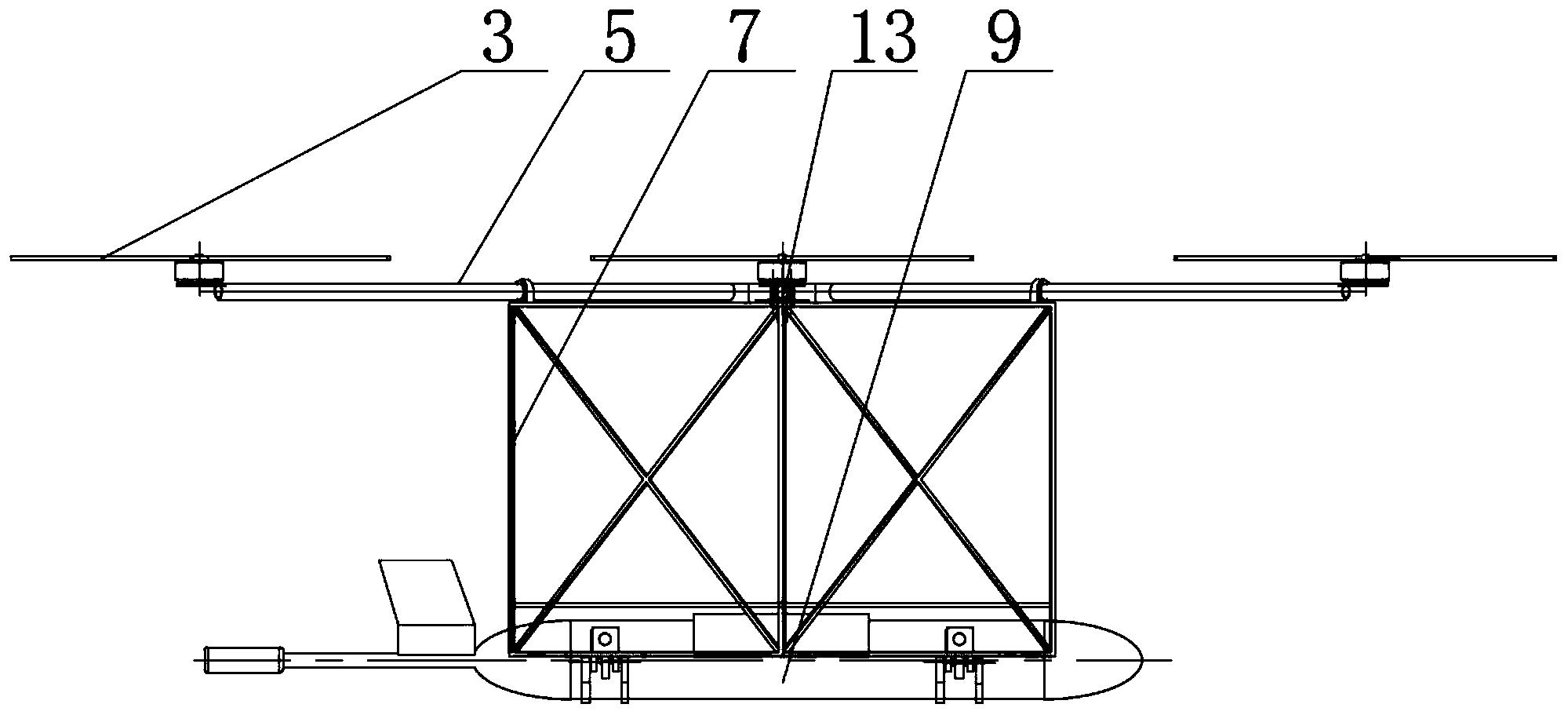
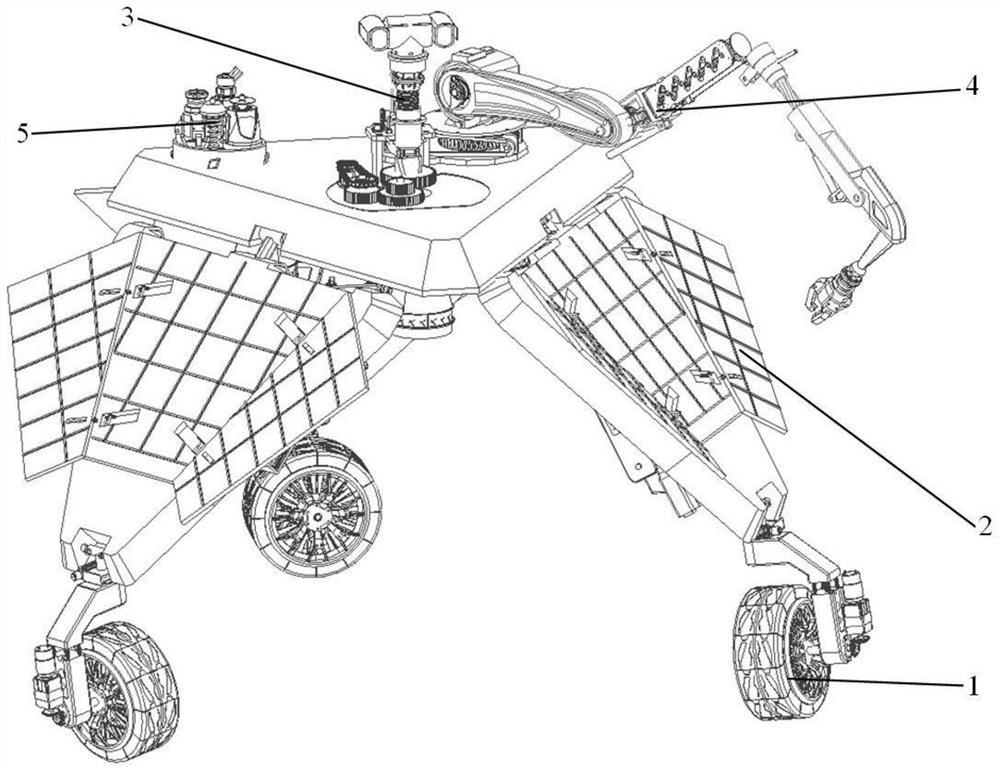
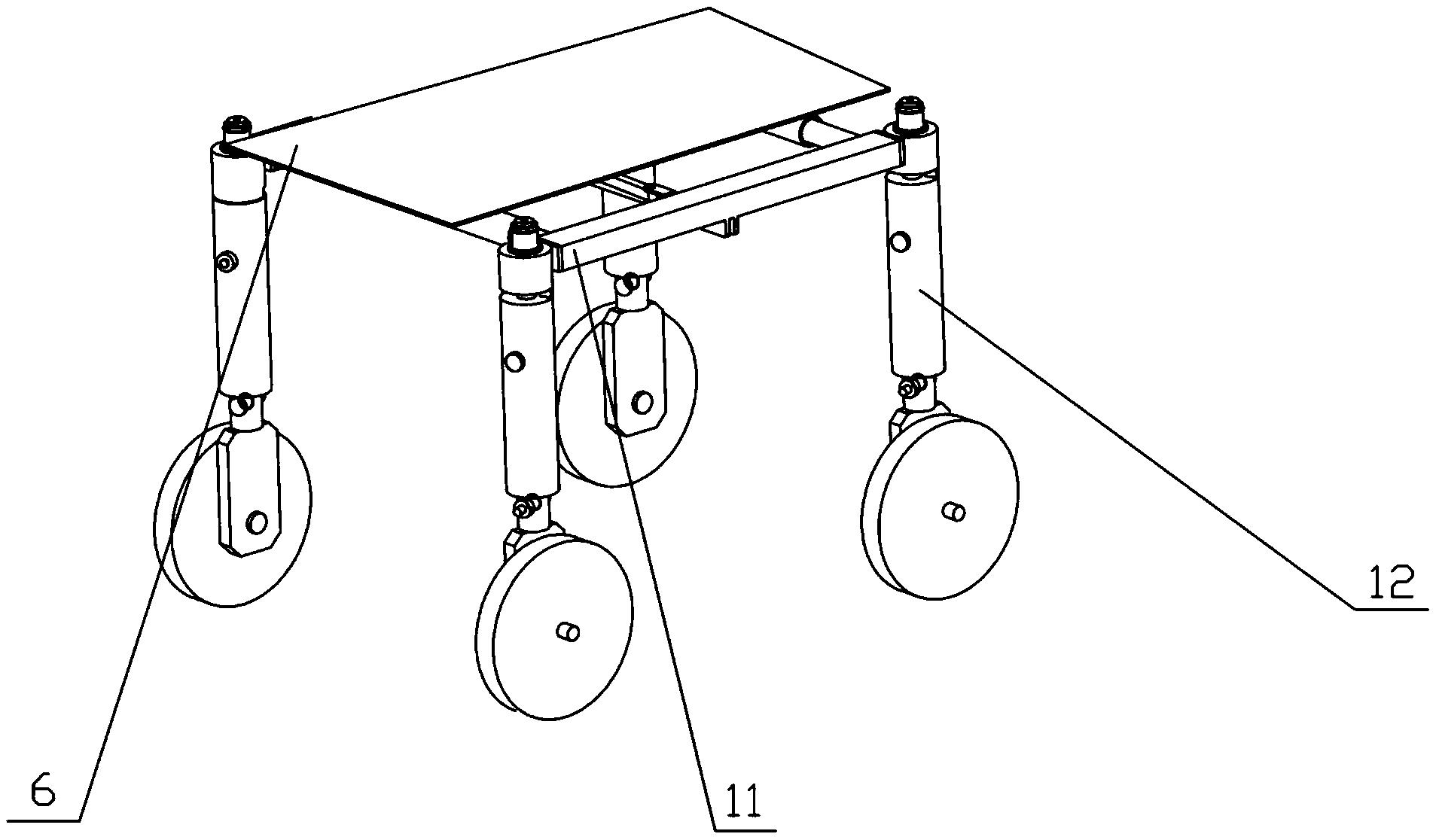
图1为根据本发明的基于三腿的轻载多冗余驱动六自由度并联调姿平台的结构示意图;
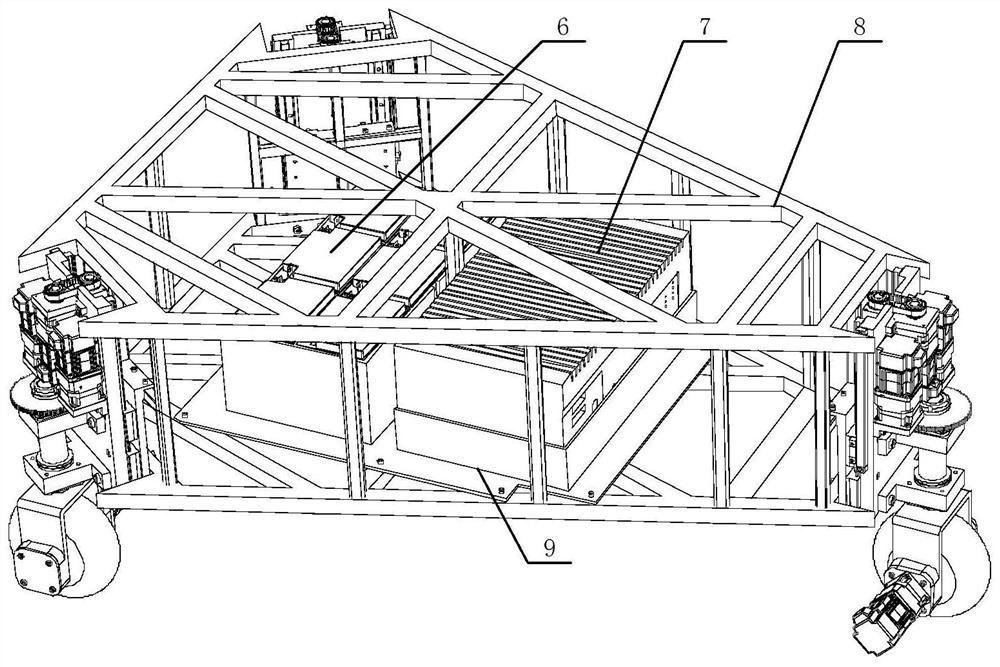
图2为根据本发明的基于三腿的轻载多冗余驱动六自由度并联调姿平台的去除罩体车内部示意图;
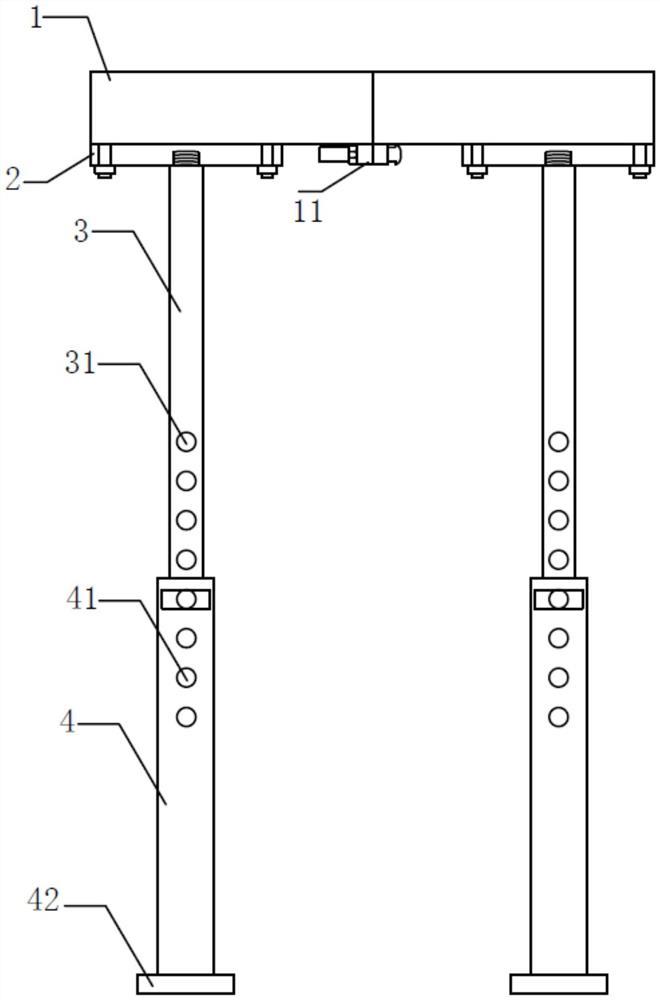
图3为根据本发明的基于三腿的轻载多冗余驱动六自由度并联调姿平台的车架单元示意图;
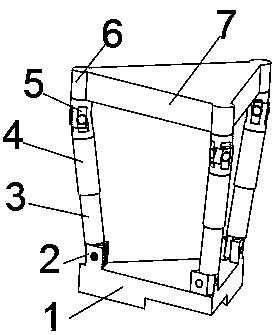
图4为根据本发明的基于三腿的轻载多冗余驱动六自由度并联调姿平台中PzRzRyS
图5为根据本发明的基于三腿的轻载多冗余驱动六自由度并联调姿平的PzRzRyS
图6为根据本发明的基于三腿的轻载多冗余驱动六自由度并联调姿平台的PzRzRyS
附图中标记编号如下:1-橡胶防撞条、2-上罩体、3-下罩体、4-车身倾角仪(以下简称倾角仪)、5-激光测距仪、6-锂电池、7-控制柜、8-车架、9-托板。
升降部分包括:101-升降电机、102-升降减速器、103-位移传感器、104-升降支座、105-升降部分主动带轮、106-升降部分同步带、107-升降部分从动带轮、108-导轨、109-滑块、110-力传感器、111-升降部分轴承支座、112-L形连接板、113-丝杠、114-丝母、115-丝母架、116-升降部分扭矩传感器、118-基板。
转向部分包括:201-转向部分轴承支座、202-转向部分转角仪、203-转向轴、204-转向大齿轮、205-圆螺母、206(206’)-转向电机、207(207’)-转向减速器、208(208’)-转向部分扭矩传感器、209(209’)-转向小齿轮、215转向支座。
行走部分包括:301-行走电机、302-行走减速器、303-行走部分扭矩传感器、304-U型支座、305-车轮、306-行走部分转角仪、311车轮轴。
具体实施方式
本发明提供了一种基于三腿的轻载多冗余驱动六自由度并联调姿平台。
本发明涉及一种3-PzRzRyS
全向运动调姿平台具体的结构可分为车体和调姿腿两大部分。
车体部分包括车体框架结构和控制组件。框架结构部分,如图1至图3所示,其底角为70度的等腰三角形方钢框架以及外侧上下两罩体。控制组件包括锂电池、控制柜、倾角仪、3个激光测距仪。
三角形车体框架的3个角的侧面方钢结构用来连接定位各调姿腿的L形连接板。框架结构中间用来搭载锂电池及控制柜等较重的控制组件。上罩体的3个圆角部分安装了激光测距仪,侧面上下分别固定了橡胶防撞条,减缓小车发生碰撞时对车体的伤害。下罩体中心点安装了车身倾角仪。
控制组件中倾角仪用来测量车体的水平方向上的倾斜角度并传给控制柜。而控制柜则收集来自车体及各个调姿腿的多个信号,来控制小车的运行轨迹及调整姿态。安装在车体3个角上的激光测距仪实现了车在全向运动时与环境状况的360度测距,有效防止碰撞发生。锂电池则为各调姿腿的3个电机以及车上控制柜提供动力。
六自由度调姿腿包括与车体垂直的升降部分、平面转向部分和车轮行走部分,三部分分别实现调姿腿的三个自由度,而车轮与地面接触时,可与地面构成封闭,并且可发生绕x轴、y轴和z轴的不等量转动,故可等效为非标准球面接触的S副,为区别于普通S副,将其定义为S
升降部分包括升降电机、升降减速器、升降部分主动带轮、升降部分从动带轮、升降部分同步带、升降部分轴承支座、升降支座、基板、丝杠、丝母、丝母架、导轨、滑块、连接板、升降部分扭矩传感器、力传感器和位移传感器。其中,升降电机、升降减速器和升降部分扭矩传感器依次相连,升降部分扭矩传感器与升降支座固连,升降支座与基板内侧的上半部分固连,其中升降部分扭矩传感器用以检测升降电机的驱动力矩;升降部分扭矩传感器与升降部分主动带轮连接,升降部分从动带轮与丝杠的上端通过键连接,升降部分主动带轮和升降部分从动带轮通过升降部分同步带连接与传动,丝杠支撑固定于两升降部分轴承支座之间,并通过两升降部分轴承支座与基板的外侧固连;丝杠与丝母螺纹连接,丝母与丝母架连接,在丝母与丝母架的连接处设有力传感器,可测量丝母传递给丝杠的力;丝母架与L形连接板的外侧固连,在L形连接板外侧的两侧分别固连有两个滑块,在基板外侧的两侧固连有导轨,导轨与滑块滑动连接构成移动副,可实现相对直线运动,在基板的侧面设有位移传感器,其中位移传感器用于测量升降部分滑块的升降高度;
转向部分包括转向电机、转向减速器、转向小齿轮、转向大齿轮、转向轴、转向部分轴承支座、转向支座、圆螺母、转向部分扭矩传感器和转向部分转角仪。其中,转向电机、转向减速器和转向部分扭矩传感器依次相连,转向部分扭矩传感器与转向支座固连,转向支座与基板的外侧固连,其中转向部分扭矩传感器用以检测转向电机的驱动力矩;转向部分扭矩传感器的输出轴与转向小齿轮通过键进行连接,转向小齿轮对称分布与转向大齿轮进行啮合,运用两个转向小齿轮分别负责带动转向大齿轮进行正反转,来消除齿轮传动过程中产生的间隙;转向大齿轮与转向轴的上端通过键连接,并用圆螺母对其进行预紧与定位,转向轴支撑固定于两转向部分轴承支座之间,并通过两转向部分轴承支座与基板的内侧固连,转向部分转角仪设于转向轴与轴承支座的接合处,其中转向部分转角仪用于检测转向轴转过的角度。转向轴支撑于两轴承支座之间,并通过两轴承支座与基板的内侧固连,转向轴的上端与转向大齿轮通过键连接,并用圆螺母对其进行预紧及其定位,在转向大齿轮两侧,对称分布两个转向小齿轮,转向小齿轮与转向大齿轮啮合,转向电机与转向减速器固连,转向电机与转向减速器通过支座与基板的外侧固连,扭矩传感器设于行走减速器与支座的接合处,转向部分转角仪设于转轴与轴承支座的接合处。
行走部分包括行走电机、行走减速器、车轮、车轮轴、U型支座、行走部分扭矩传感器和行走部分转角仪。其中,车轮轴与车轮固连后,其第一端通过轴承支撑于U型支座的外侧,第二端通过轴承支撑于U型支座的内侧,并穿过U型支座的内侧与行走部分扭矩传感器连接;行走部分扭矩传感器连接与行走减速器相连,之后再与行走电机连接,其中行走部分扭矩传感器用以检测行走电机的驱动力矩;行走部分转角仪设于车轮轴第二端与U型支座内侧的接合处,用于实时检测车轮轴的转角;行走电机动力依次通过行走减速器、行走部分扭矩传感器,带动车轮轴进行转动,进而带动车轮运动,实现行走功能。车轮通过轴承支撑于U型支座的凹槽内,行走电机、行走减速器和行走部分扭矩传感器依次连接,行走部分扭矩传感器与U型支座的外侧固连,其中行走部分扭矩传感器用以检测行走电机的驱动力矩;行走部分转角仪设于U型支座的内侧,用于实时检测车轮轴的转角。上述行走部分的U型支座上端面与转向部分中转向轴的下端焊接,转向部分与升降部分均固连于基板之上。升降部分的主动带轮在升降电机的驱动下,带动丝杠进行转动,进而带动丝母和连接板实现上升与下降,使得滑块做直线运动,从而实现沿Z方向的移动;转向部分的转向小齿轮在转向电机的驱动下,可带动转向大齿轮实现绕Z轴的转动;行走部分的车轮在行走电机的驱动下,可实现绕Y方向的转动;转向大齿轮绕Z轴的转动与行走部分合理组合可实现全向运动;行走部分的车轮在与地面接触时因其可与地面发生相对绕X轴Y轴和Z轴的转动,所以可以等效成S副,综上所述,支腿具有六个自由度,构成六自由度串联支链腿机构单元的PzRzRyS
六自由度调姿过程如下:
绕X轴翻转:运输车静止状态下,平台绕X轴向前翻转,前轮后轮同时靠行走驱动电机锁死,防止车的位置在调姿时位置窜动,控制柜在被输入相应的翻转角度后,计算后面两调姿腿的对应的后面两个调姿腿由升降驱动电机驱动一起以相同速度向上抬升,随后后腿降低,向后翻转则抬升前腿降低后腿。
绕Y轴翻转:运输车静止状态下,平台绕Y轴向右翻转,前轮后轮同时靠行走驱动电机锁死,控制柜在被输入相应的翻转角度后,右后轮降低,左后轮抬升,前轮调整至两轮位置中点,向左翻转则降低左后腿降低右后腿,前腿同样相应调整。
绕Z轴转动:将车体调整至水平状态,3个驱动轮依次转向,使3个轮的转向轴交于工作需要的车体转动中心,转向轴驱动电机锁死,三个轮子行走电机以相同的速度转动至需要姿态。
沿X、Y轴平移:将3个轮子分别调转至X、Y轴方向,行走电机驱动即可。
沿Z轴平移:3个调姿腿的升降电机同时驱动,完成Z轴的升降。
如图1,上罩体2的每个角上部设以凹槽放有激光测距仪5,防止车体发生碰撞,上下两侧贴有橡胶防撞条1,在下罩体3的中心处设有倾角仪4,用来实时测量车体姿态。如图2,调姿腿单元的L形连接板112与车架8三个角上的方钢架通过上下不同侧面的8个螺栓固定连接,L形连接板112中间的槽正好与方钢架卡住,使固定更加稳定,车架8具体外形如图3。
如图4和图5所示PzRzRyS
如图6所示的PzRzRyS
如图6所示的PzRzRyS
六自由度并联调姿平台工作过程如下:
绕X、Y轴翻转,控制人员将需要的姿态信号输入控制柜7后,通过车体底部的倾角仪4来测定车体平台的此时倾斜角度,计算出到达目标姿态每个调姿腿要升降的具体数值,驱动各调姿腿的升降模块的升降电机101,升降电机通过升降减速器102带动传动皮带转动,连接在升降部分从动带轮107的丝杠113一同转动,丝母114也随之平行于调姿腿基板118上下滑动。丝母架115上安装了连接车体的L形连接板112,从而实现了车体该部分的升降,而不同位置的不同升降具体,完成了车体绕X、Y轴的翻转。
绕Z轴转动,控制人员将选定的垂直转动轴位置和转动角度输入控制柜7,通过转向轴203上的转向部分转角仪202来计算当前车轮的转角,控制柜计算出每个车轮以此转动中心需要转动的角度并驱动每个腿的两个转向电机206,206’,经过两对称齿轮的传动和减速,中间的转向轴203转动,车轮305改变方向,3个车轮依次转向完成后,转向电机锁死,控制柜同时驱动3个车轮的行走电机301以相同速度经过同步带传动带动轮子行走一定圆弧,以此实现车体绕特定旋转轴转过一定角度。
沿X、Y轴平移,控制人员选定行进方向和平移的距离并输入控制柜7,控制柜通过转向部分转角仪202来计算当前车轮的转角,控制柜算出每个车轮转至需要方向的角度,并驱动每个调姿腿的两个转向电机206,206’,经过对称啮合的齿轮减速,转向轴203带动车轮的转动,3个车轮都依次转至需要的行进方向后,转向电机锁死,3个行走电机301以相同的速度转动,车体平移至工作位置。
沿Z轴平移,控制人员输入Z轴的平移命令,3个调姿腿的升降模块的升降电机101同时开始启动,带传动使丝杠113转动,丝母114也随之升降,丝母架115上安装了连接车体的L形连接板112,从而实现了车体该部分的升降。
当小车进行转场工作或工作地面平整度较低时,升降模块的套筒传感器实时测量出每个调姿腿的受力,当某一腿受力过大时,升降电机101启动,当套筒传感器测量该腿受力恢正常时电机停止,以此补偿地面的平整误差。
可以理解的是,以上实施方式仅仅是为了说明本发明的原理而采用的示例性实施方式,然而本发明并不局限于此。本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或全部技术特征进行等同替换;而这些修改或替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
基于三腿的轻载多冗余驱动六自由度并联调姿平台专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0