









专利摘要
本发明属于石油工程技术领域,具体涉及一种基于聚类分析的油气水三相流相态临界点识别方法;从电流测量数据值中挑选3个数据,定义为初始中心M,以M为中心分为3类;将M以外的数据归类到离它自身最近的一个初始中心点代表的类中,并计算整组数据的差值绝对值之和Epre;提取两类数据中的中心位置的数据作为新的中心Mnew,重新归类计算其对应的差值绝对值之和Enew,利用交换的总代价为负的原则更换M,更新后的初始中心命名为Mproc;重复上述两步,直到更新后的初始中心Mproc不再变化或迭代次数k达到最大迭代次数kmax。改善油气水三相流分相流量测量时临界点识别对其测量精度的影响,提高油气水三相流的计量精度。
权利要求
1.一种基于聚类分析的油气水三相流相态临界点识别方法,其特征在于:所述识别方法包括以下步骤:
步骤一:从所有油气水三相流电流测量数据值中挑选3个数据,将其定义为初始中心M,并将所有数据以M为中心分为3类;
步骤二:根据欧几里德距离将除初始中心M以外的其他数据归类到离它自身最近的一个初始中心点所代表的类中,并计算整组数据在该种分类情况下的差值绝对值之和E
步骤三:提取步骤二的两类数据中的中心位置的数据作为新的中心M
步骤四:重复步骤二和步骤三,直到更新后的初始中心M
其中,所述步骤一中油气水三相流电流测量数据用集合X表示,集合X表示为:
X={a
式中i,j均表示电流数据值的序号,a
因油气水三相流各相被压差传感器检测获取的数据均会发生改变,因此,将集合X进行分类整合,集合X表示为:
X={A
式中A
步骤二中所述归类后的结果为:
式中a
所述步骤三中新的中心M
式中
2.根据权利要求1所述的一种基于聚类分析的油气水三相流相态临界点识别方法,其特征在于:步骤一所述的挑选3个初始中心的方法为:
首先根据欧几里德距离计算所有电流数据值间的距离D:
式中
然后计算电流数据值a
式中l表示电流数据值的序号,为方便后续说明,将矩阵V进行改写,矩阵V又表示为:
式中u表示矩阵V中元素的个数,将矩阵V中的所有元素按升序排列,排列后的矩阵V
V
式中v
M={a
式中a
3.根据权利要求1所述的一种基于聚类分析的油气水三相流相态临界点识别方法,其特征在于:
步骤二中整组数据在该种分类情况下的差值绝对值之和E
式中p,r,t分别表示集合A
4.根据权利要求1所述的一种基于聚类分析的油气水三相流相态临界点识别方法,其特征在于:
步骤三中新的中心M
式中A
新的中心M
式中p′,r′,t′分别表示集合A
5.根据权利要求1所述的一种基于聚类分析的油气水三相流相态临界点识别方法,其特征在于:步骤三中所述的总代价TP的表达式为:
式中TP为新的中心M
步骤三中更新后的初始中心M
式中M
6.根据权利要求1所述的一种基于聚类分析的油气水三相流相态临界点识别方法,其特征在于:步骤四中所述完成聚类的做法为:
式中R为聚类的结果,end代表聚类结束,repeat代表重复步骤二和三,若R=end,则表示完成聚类,否则R=repeat表示重复步骤二和三;
步骤四中压差传感器感应到油气水三相流相态变化的临界点为各类别间元素值的分割点。
说明书
技术领域:
本发明属于石油工程技术领域,具体涉及一种基于k-medoids聚类分析的油气水三相流相态临界点识别方法。
背景技术:
油气水三相流各相流量计量是目前油田评估油井产量的重要参数。传统的多相流测量方法是建立在对单相流测量方法的基础上,存在很多缺陷和弊端,促使传统多相流测量方法精度较低,无法为后续油田生产工作提供有效的支撑。对油气水三相流进行分离式测量,该方法将油气水三相流进行油水分离、油气分离,采用体积法计量各相流量,操作安全可靠且成本较低,测量结果的精确度由油气和油水相态临界点确定的准确度衡量。因多相流临界点检测过程中,压差传感器对测量装置中不同比例不同物质的混合物没有统一的衡量标准,测量获取的数据会产生不定时跳变,因此无法采用设置绝对值的方法来确定油气和油水相态临界点。油气和油水相态转换时,压差传感器对测量装置中混合物检测获取的电流值随时间的推移呈现单调变化,对其数据进行聚类分析即可获取油气和油水的跃变点,以确定固定体积内集油、气、水的时间。
最为常见的聚类分析算法为k-means算法,该算法原理简单且具备计算速度快等优势,但若存在异常数据或者噪音数据,异常数据或噪音数据对整体数据的处理具有极大的影响,将其应用于测量油气水三相流相态临界点检测会凸显k-means算法的缺陷,影响油气水三相流各相流量测量的结果。针对该问题,本专利提出基于k-medoids聚类分析的三相流相态临界点识别方法,并利用该方法对采集数据进行分析确定多相流测量相态转换的临界点,从而提高多相流各相流量测量的精度。
发明内容:
本发明的目的是为改善油气水三相流进行各组分分相流量测量时临界点识别对其测量精度的影响,提供一种基于k-medoids聚类分析的油气水三相流相态临界点识别方法,从而提高油气水三相流的计量精度。
本发明采用的技术方案为:一种基于聚类分析的油气水三相流相态临界点识别方法,所述识别方法包括以下步骤:
步骤一:从所有油气水三相流电流测量数据值中挑选3个数据,将其定义为初始中心M,并将所有数据以M为中心分为3类;
步骤二:根据欧几里德距离将除初始中心M以外的其他数据归类到离它自身最近的一个初始中心点所代表的类中,并计算整组数据在该种分类情况下的差值绝对值之和Epre;
步骤三:提取步骤二的两类数据中的中心位置的数据作为新的中心Mnew,并重新归类计算其对应的差值绝对值之和Enew,利用交换的总代价TP为负的原则,更换初始中心M,更新后的初始中心命名为Mproc;
步骤四:重复步骤二和步骤三,直到更新后的初始中心Mproc不再变化或者迭代次数k达到最大迭代次数kmax,即完成聚类,不同类之间的分界点即为压差传感器感应到相态变化的临界点。
进一步地,所述步骤一中油气水三相流电流测量数据用集合X表示,集合X表示为:
X={a1,a2…,ai,…,aj,…,as}
式中i,j均表示电流数据值的序号,ai,aj分别为压差传感器检测多相流获取转换的第i个和第j个电流数据值,s为是所有电流测量数据的个数;
因油气水三相流各相被压差传感器检测获取的数据均会发生改变,因此,将集合X进行分类整合,集合X表示为:
X={A1,A2,A3}
式中A1,A2,A3为压差传感器分别检测到油、水、气相获取的三组数据集合。
进一步地,步骤一所述的挑选3个初始中心的方法为:
首先根据欧几里德距离计算所有电流数据值间的距离D:
式中 为压差传感器检测多相流获取转换的电流数据值ai与电流数据值aj间的距离;
然后计算电流数据值ai与电流数据值aj(j≠i)的距离占电流数据值aj与所有数据的距离比之和V:
式中l表示电流数据值的序号,为方便后续说明,将矩阵V进行改写,矩阵V又表示为:
式中u表示矩阵V中元素的个数,将矩阵V中的所有元素按升序排列,排列后的矩阵Vsort表示为:
Vsort=[V1′,V2′,…,Vu′]
式中vu′为矩阵V所有元素v1~vu从小到大排列,排名为第u的元素,选择v1′,v2′,v3′对应的ai作为初始中心M,初始中心M表示为:
M={a10,a20,a30}
式中a10,a20,a30分别为集合A1,A2,A3的初始中心点。
进一步地,步骤二中所述归类后的结果为:
式中a10,a20,a30分别为集合A1,A2,A3的中心点,a11~a1m,a21~a2n,a31~a3h分别为离a10,a20,a30最近的所有元素,且根据欧式距离从小到大依次排列。m,n,h分别为集合A1,A2,A3中除中心以外的元素个数;
步骤二中整组数据在该种分类情况下的差值绝对值之和Epre的表达式为:
式中p,r,t分别表示集合A1,A2,A3中除中心点以外其余元素的序号。聚类分析过程中将所有中心点称为代表对象,其余数据称为非代表对象,聚类的原则是保证非代表对象与其对应的代表对象的相异度总和为最小,即Epre最小。
进一步地,所述步骤三中新的中心Mnew的选取方法为:
式中 分别是指离a10,a20,a30最近的所有元素中,距离排列在中间位置的元素,且将其定义为a10′,a20′,a30′;
步骤三中新的中心Mnew对应的归类结果为:
式中A1′,A2′,A3′分别为新的中心Mnew对应归类后的集合,a10′,a20′,a30′分别为集合A1′,A2′,A3′的中心点,a11′~a1m′′,a21′~a2n′′,a31′~a3h′′分别为离a10′,a20′,a30′最近的所有元素,且根据欧式距离从小到大依次排列,m′,n′,h′分别为集合A1′,A2′,A3′中除中心以外的元素个数;
新的中心Mnew对应的差值绝对值之和Enew的表达式为:
式中p′,r′,t′分别表示集合A1′,A2′,A3′中除中心点以外其余元素的序号。
进一步地,步骤三中所述的总代价TP的表达式为:
式中TP为新的中心Mnew替换初始中心M产生的总代价,q表示电流数据值的序号,P10q,P20q,P30q为电流数据值aq在a10,a20,a30被a10′,a20′,a30′替换后产生的代价,Enew为新的中心Mnew对应的差值绝对值之和,Epre为初始中心Mproc对应的差值绝对值之和,总代价TP即为新的中心Mnew和初始中心Mproc两者对应聚类结果相异度的差值;总代价TP为负,说明新的中心Mnew对应的聚类效果越好;
步骤三中更新后的初始中心Mproc的确定方法为:
式中Mproc的初始值为初始中心M,若总代价TP为负时,将新的中心Mnew赋值给中心Mproc,否则保留初始中心Mproc。
进一步地,步骤四中所述完成聚类的做法为:
式中R为聚类的结果,end代表聚类结束,repeat代表重复步骤二和三,若R=end,则表示完成聚类,否则R=repeat表示重复步骤二和三;
步骤四中压差传感器感应到油气水三相流相态变化的临界点为各类别间元素值的分割点。
本发明的有益效果:采用k-medoids方法对油气水三相流电流测量数据值进行聚类,实现了快速高效准确的识别油气水三相流相态临界点,提高了油气水三相流参数测量的准确性,从而为油田提供可靠的生产测井数据。
附图说明:
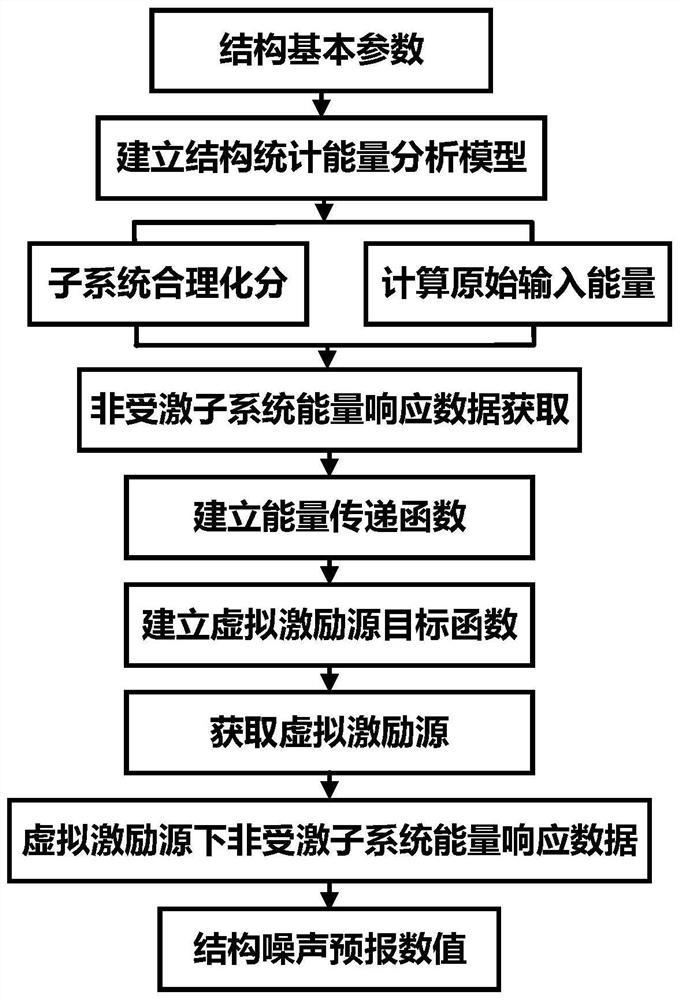
图1为基于k-medoids聚类分析的油气水三相流相态识别方法的流程图;
图2为基于k-medoids聚类分析的油气水三相流相态临界点判别图;
图3为识别方法应用到油气水三相流模拟井测量的各相流量与实际流量的关系图;
图4为采用识别方法测量各相流量误差分析图;
图5为基于k-medoids聚类分析的识别方法和基于k-means聚类分析的识别方法识别油相的误差分析对比图。
具体实施方式:
实施例一
具体实施方式一
一种基于聚类分析的油气水三相流相态临界点识别方法,所述识别方法包括以下步骤:
步骤一:从所有油气水三相流电流测量数据值中挑选3个数据,将其定义为初始中心M,并将所有数据以M为中心分为3类;
步骤二:根据欧几里德距离将除初始中心M以外的其他数据归类到离它自身最近的一个初始中心点所代表的类中,并计算整组数据在该种分类情况下的差值绝对值之和Epre;
步骤三:提取步骤二的两类数据中的中心位置的数据作为新的中心Mnew,并重新归类计算其对应的差值绝对值之和Enew,利用交换的总代价TP为负的原则,更换初始中心M,更新后的初始中心命名为Mproc;
步骤四:重复步骤二和步骤三,直到更新后的初始中心Mproc不再变化或者迭代次数k达到最大迭代次数kmax,即完成聚类,不同类之间的分界点即为压差传感器感应到相态变化的临界点。
具体实施方式二
本实施方式为对实施方式一的进一步说明,所述步骤一中油气水三相流电流测量数据用集合X表示,集合X表示为:
X={a1,a2…,ai,…,aj,…,as}
式中i,j均表示电流数据值的序号,ai,aj分别为压差传感器检测多相流获取转换的第i个和第j个电流数据值,s为是所有电流测量数据的个数;
因油气水三相流各相被压差传感器检测获取的数据均会发生改变,因此,将集合X进行分类整合,集合X表示为:
X={A1,A2,A3}
式中A1,A2,A3为压差传感器分别检测到油、水、气相获取的三组数据集合。
具体实施方式三
本实施方式为对实施方式二的进一步说明,步骤一所述的挑选3个初始中心的方法为:
首先根据欧几里德距离计算所有电流数据值间的距离D:
式中 为压差传感器检测多相流获取转换的电流数据值ai与电流数据值aj间的距离;
然后计算电流数据值ai与电流数据值aj(j≠i)的距离占电流数据值aj与所有数据的距离比之和V:
式中l表示电流数据值的序号,为方便后续说明,将矩阵V进行改写,矩阵V又表示为:
式中u表示矩阵V中元素的个数,将矩阵V中的所有元素按升序排列,排列后的矩阵Vsort表示为:
Vsort=[Vl′,V2′,…,Vu′]
式中vu′为矩阵V所有元素v1~vu从小到大排列,排名为第u的元素,选择v1′,v2′,v3′对应的ai作为初始中心M,初始中心M表示为:
M={a10,a20,a30}
式中a10,a20,a30分别为集合A1,A2,A3的初始中心点。
具体实施方式四
本实施方式为对实施方式三的进一步说明,步骤二中所述归类后的结果为:
式中a10,a20,a30分别为集合A1,A2,A3的中心点,a11~a1m,a21~a2n,a31~a3h分别为离a10,a20,a30最近的所有元素,且根据欧式距离从小到大依次排列。m,n,h分别为集合A1,A2,A3中除中心以外的元素个数;
步骤二中整组数据在该种分类情况下的差值绝对值之和Epre的表达式为:
式中p,r,t分别表示集合A1,A2,A3中除中心点以外其余元素的序号。聚类分析过程中将所有中心点称为代表对象,其余数据称为非代表对象,聚类的原则是保证非代表对象与其对应的代表对象的相异度总和为最小,即Epre最小。
具体实施方式五
本实施方式为对实施方式四的进一步说明,所述步骤三中新的中心Mnew的选取方法为:
式中 分别是指离a10,a20,a30最近的所有元素中,距离排列在中间位置的元素,且将其定义为a10′,a20′,a30′;
步骤三中新的中心Mnew对应的归类结果为:
式中A1′,A2′,A3′分别为新的中心Mnew对应归类后的集合,a10′,a20′,a30′分别为集合A1′,A2′,A3′的中心点,a11′~a1m′′,a21′~a2n′′,a31′~a3h′′分别为离a10′,a20′,a30′最近的所有元素,且根据欧式距离从小到大依次排列,m′,n′,h′分别为集合A1′,A2′,A3′中除中心以外的元素个数;
新的中心Mnew对应的差值绝对值之和Enew的表达式为:
式中p′,r′,t′分别表示集合A1′,A2′,A3′中除中心点以外其余元素的序号。
具体实施方式六
本实施方式为对实施方式五的进一步说明,步骤三中所述的总代价TP的表达式为:
式中TP为新的中心Mnew替换初始中心M产生的总代价,q表示电流数据值的序号,P10q,P20q,P30q为电流数据值aq在a10,a20,a30被a10′,a20′,a30′替换后产生的代价,Enew为新的中心Mnew对应的差值绝对值之和,Epre为初始中心Mproc对应的差值绝对值之和,总代价TP即为新的中心Mnew和初始中心Mproc两者对应聚类结果相异度的差值;总代价TP为负,说明新的中心Mnew对应的聚类效果越好;
步骤三中更新后的初始中心Mproc的确定方法为:
式中Mproc的初始值为初始中心M,若总代价TP为负时,将新的中心Mnew赋值给中心Mproc,否则保留初始中心Mproc。
具体实施方式七
本实施方式为对实施方式六的进一步说明,步骤四中所述完成聚类的做法为:
式中R为聚类的结果,end代表聚类结束,repeat代表重复步骤二和三,若R=end,则表示完成聚类,否则R=repeat表示重复步骤二和三,转具体实施方式四;
步骤四中压差传感器感应到油气水三相流相态变化的临界点为各类别间元素值的分割点。
为验证本发明中基于k-medoids聚类分析的油气水三相流相态临界点识别方法的准确性,将本发明应用到模拟井中获得了如图2所示的信号图,对临界点进行识别,经计算油气水三相测量精度分别为1.73%,1.54%,2.04%,高于现有方法。
为降低偶然性进行了多组多相流测量实验,测量各相流量的实验结果分析如图3和图4所示,将该识别方法与现有的基于k-means聚类分析的识别方法进行比较,油相测量的误差分析对比如图5所示。经计算可知基于k-medoids聚类分析的油气水三相流相态临界点识别方法识别油、气、水相的最大相对误差分别为1.92%、1.68%、2.67%,均在测量允许误差范围内,满足油田生产的需求,且高于现有方法。
本发明采用k-medoids聚类分析方法来识别油气水三相流相态临界点,且该识别方法识别效率高、应用性强、准确度高,由于油气水相态临界点的识别是三相流研究的重要指标,所以本发明应用到油田生产是可行的。
一种基于聚类分析的油气水三相流相态临界点识别方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0