









专利摘要
本发明涉及一种爬壁机器人。包括框架,框架包括框本体和相对安装在所述框本体端部上的两个连接体;攀附机构,安装在所述框本体上,用于使所述机器人攀附在工作面上;自适应机构,安装在两所述接体上,所述自适应机构包括安装在所述连接体的中部并始终与工作面接触且能在所述框本体和所述工作面之间往复滑动的支撑组件,设置在所述连接体上且关于所述支撑组件对称的两驱动轮,以及连接所述支撑组件和所述驱动轮的连杆滑块机构。当工作面为曲面时,在连杆滑块机构的作用下,进一步带动驱动轮与工作面同样保持接触,最终使得驱动轮和支撑组件对机器人共同形成支撑作用,确保机器人在各种不同的工作面上均具备稳定的攀附和运行能力。
说明书
技术领域
本发明涉及机器人技术领域,特别是涉及一种爬壁机器人。
背景技术
基于高空作业效率低、安全系数低且成本较高的前提下,爬壁机器人广受各行业的青睐。随着社会发展水平的不断提高和工作环境的日益复杂,人们对爬壁机器人功能的要求也在不断增加。目前爬壁机器人主要从事于检测、壁面清洗、救援等工作,作为高空极限作业的一种自动化装备,具有广阔的应用前景。
随着经济的不断发展,各类建筑物的造型不在局限于传统的方型或其它规则形状,一般地,传统的爬壁机器人只能适用在平面上行走。
发明内容
基于此,有必要提供一种具有曲面自适用能力的爬壁机器人。
一种爬壁机器人,包括:
框架,包括框本体和相对安装在所述框本体端部上的两个连接体;
攀附机构,安装在所述框本体上,用于使所述机器人攀附在工作面上;
自适应机构,安装在两所述接体上,所述自适应机构包括安装在所述连接体的中部并始终与工作面接触且能在所述框本体和所述工作面之间往复滑动的支撑组件,设置在所述连接体上且关于所述支撑组件对称的两驱动轮,以及连接所述支撑组件和所述驱动轮的连杆滑块机构;
其中,当所述支撑组件滑动时,所述滑块连杆机构带动所述两驱动轮与工作面接触。
在其中一个实施例中,所述连杆滑块机构包括滑动销轴、弹性件、连杆和摇杆,所述滑动销轴与所述连接体中部开设的滑槽配合,所述支撑组件与所述滑动销轴连接,所述弹性件连接在所述滑动销轴和所述框本体之间,所述连杆的一端与所述滑动销轴铰接,所述连杆的另一端与所述摇杆的一端铰接,所述摇杆的另一端通过铰接轴与所述连接体的端部铰接,所述驱动轮与所述铰接轴连接。
在其中一个实施例中,所述弹性件为复位弹簧。
在其中一个实施例中,所述框架上还设置有越障机构,所述越障机构包括安装在所述框本体上第一越障轮和第二越障轮,所述第一越障轮和第二越障轮分别位于同一所述自适应机构的两所述驱动轮之间,所述第一越障轮和第二越障轮的中心到所述框本体的距离均小于所述驱动轮的中心到所述框本体的距离。
在其中一个实施例中,所述第一越障轮和第二越障轮沿其周向均开设有用于增强摩擦的防滑齿。
在其中一个实施例中,所述框本体包括平行设置的两横梁,垂直连接在所述两横梁之间的两纵梁,以及安装在两所述横梁的中部并与所述纵梁平行且向同一方向凸出的两凸杆;
所述连接体包括V字型安装杆、和连接在所述V字型安装杆端部和所述横梁端部之间的立柱,所述V字型安装杆的中部与所述横梁的中部固定连接。
在其中一个实施例中,所述攀附机构包括设置在所述框本体上的螺旋桨、和驱动所述螺旋桨转动的驱动电机,所述螺旋桨的旋转平面与所述框本体所在的平面平行。
在其中一个实施例中,所述框本体上还设置有用于保护所述螺旋桨的保护圈。
在其中一个实施例中,所述支撑组件包括支撑杆和万向轮,所述支撑杆的一端与所述连杆滑块机构连接,所述支撑杆的另一端与所述万向轮连接。
在其中一个实施例中,所述驱动轮和所述万向轮上均安装有可变形的橡胶轮套。
本发明提供的爬壁机器人,由于安装了自适应机构,当工作面为曲面时,支撑组件与工作面保持接触,在连杆滑块机构的作用下,进一步带动驱动轮与工作面同样保持接触,驱动轮不会处于悬空状态,最终使得驱动轮和支撑组件对机器人共同形成支撑作用,确保机器人在各种不同的工作面上均具备稳定的攀附和运行能力。
附图说明
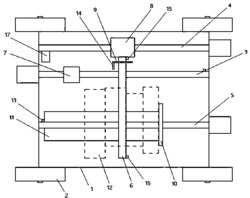
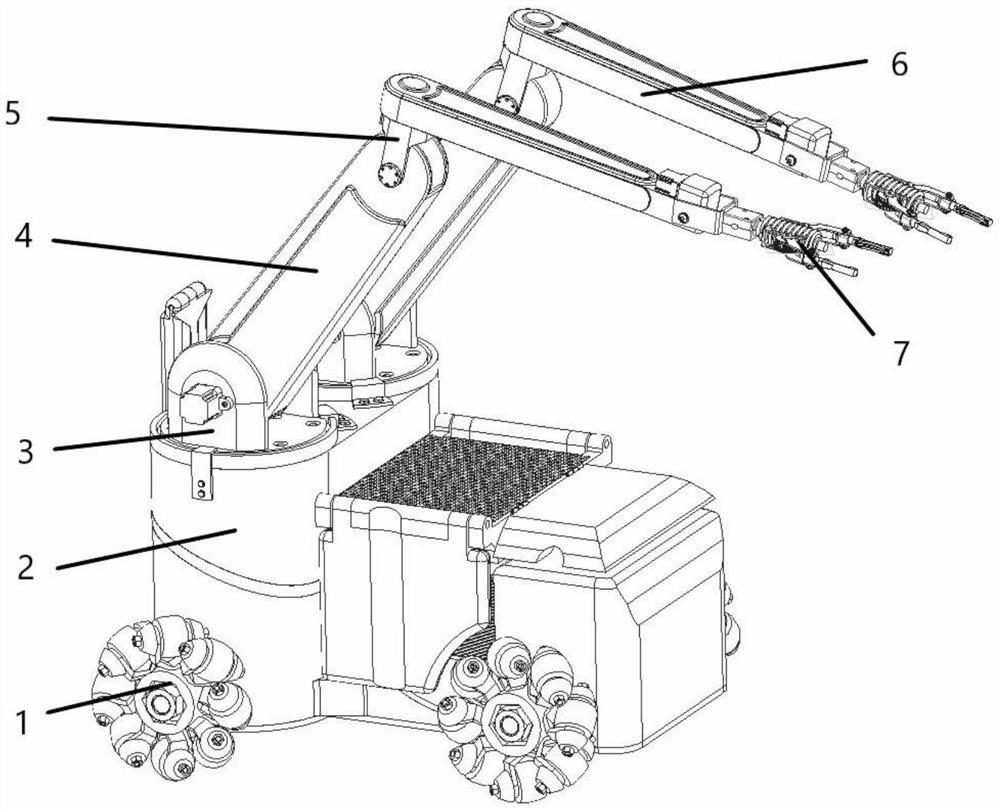
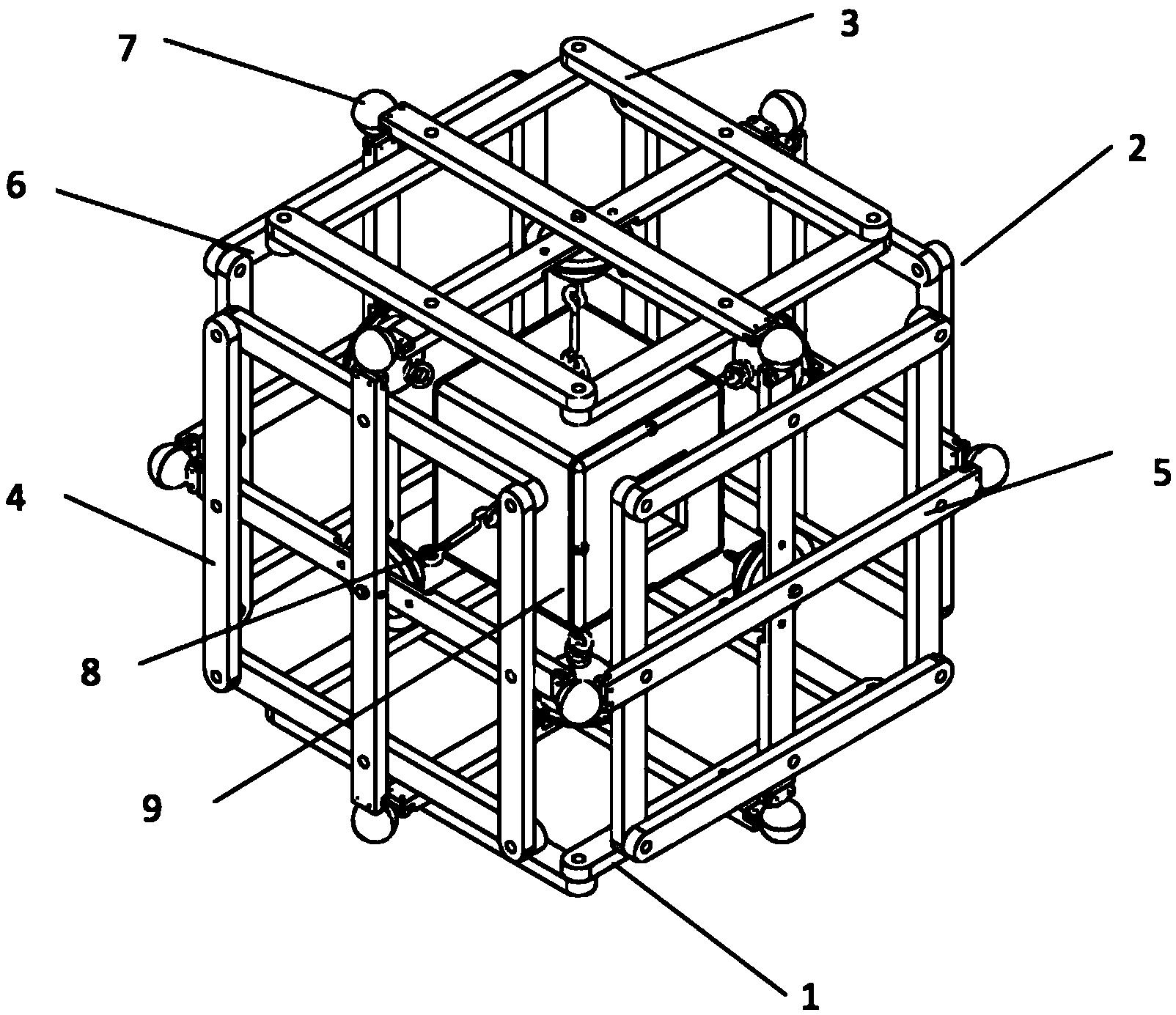
图1为机器人的立体结构示意图;
图2为机器人在平面上运动的侧视结构示意图;
图3为机器人在曲面上运动的侧视结构示意图;
图4为机器人跨越障碍物的原理示意图。
具体实施方式
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“内”、“外”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
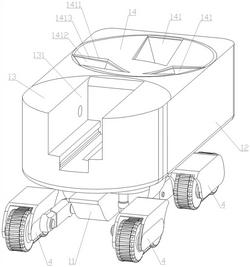
同时参阅图1和图2,一种爬壁机器人000,包括框架100、攀附机构200和自适应机构300。框架100包括框本体110和两个连接体120,两个连接体120相对的固定安装在框本体110的两个端部上。当然,连接体120连接的数量也可以大于两个。攀附机构200安装在框本体110上与连接体120相对的一侧上,攀附机构200用于使机器人000附着在工作面500上。自适应机构300安装在两连接体120上,自适应机构300包括支撑组件310、两驱动轮330和连杆滑块机构320。支撑组件310安装在连接体120的中部,支撑组件310始终与工作面500接触、并且能在框本体110和工作面500之间往复滑动,两驱动轮330关于支撑组件310对称的设置在连接体120上,两驱动轮330采用差速驱动的方式,依靠两驱动轮330之间的速度差以实现机器人000的转向。连杆滑块机构320则连接在支撑组件310和驱动轮330之间。其中,当支撑组件310滑动时,连杆滑块机构320带动两驱动轮330与工作面500接触。
参阅图1,具体的,框本体110为矩形结构,框本体110包括两横梁111、两纵梁112和两凸杆113,两横梁111平行设置,两纵梁112分别与横梁111连接,横梁111与纵梁112之间相互垂直。两凸杆113则分别安装在两横梁111的中部,凸杆113与纵梁112平行,并且向同一方向凸出。
参阅图1,连接体120包括V字型安装杆121和立柱122,V字型安装杆121的中部与横梁111的中部固定连接,V字型安装杆121的端部与横梁111的端部基本平齐,立柱122则连接在V字型安装杆121端部和横梁111端部之间,立柱122可以与V字型安装杆121一体成型,立柱122用于增强V字型安装杆121与横梁111之间连接的稳定性。
参阅图2和图3,连杆滑块机构320包括滑动销轴321、弹性件322、连杆323和摇杆324。V字型安装杆121的中部沿竖直方向开设有滑槽121a,滑动销轴321则与该滑槽121a相配合,滑动销轴321可以在滑槽121a中上下往复滑动,弹性件322的一端与滑动销轴321连接,弹性件322的另一端则与框本体110上横梁111的中部连接,连杆323的一端与滑动销轴321铰接,连杆323的另一端与摇杆324的一端铰接,摇杆324的另一端通过铰接轴325与V字型安装杆121的端部铰接,驱动轮330则与铰接轴325固定连接,当滑动销轴321向框本体110方向(即向上)滑动时,连杆323将带动摇杆324向上(逆时针)摆动,摇杆324与V字型安装杆121之间的夹角变小,摇杆324带动两驱动轮330绕铰接轴325逆时针摆动。
弹性件322为复位弹簧,复位弹簧为圆柱压缩弹簧或锥形压缩弹簧,当滑动销轴321向上运动时,复位弹簧产生压缩,滑动销轴321可以在复位弹簧弹力的作用下沿滑槽121a向下运动(即复位)。
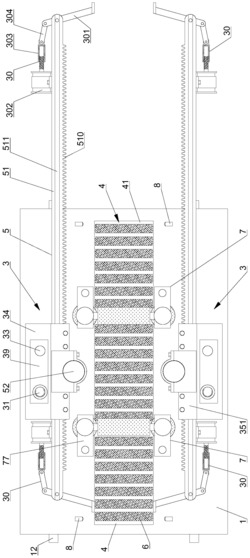
攀附机构200包括螺旋桨210和驱动电机,驱动电机安装在横梁111的中部,驱动电机的输出轴与螺旋桨210连接,驱动电机驱动螺旋桨210转动,螺旋桨210的旋转平面与框本体110所在的平面平行。当螺旋桨210正转时,螺旋桨210向背离工作面500的方向排出空气,空气对螺旋桨210产生的反作用力则传导至框架100,框架100将反作用力通过驱动轮330和支撑组件310进一步传导至工作面500,从而使整个机器人000附着在工作面500上。当螺旋桨210正转速度增大时,空气对螺旋桨210产生的反作用力增大,机器人000的附着力增强;相反,当螺旋桨210正转速度减小时,空气对螺旋桨210产生的反作用力减小,机器人000的附着力减弱。
参阅图1,框本体110上还设置有保护圈220,保护圈220与横梁111的两端部连接,螺旋桨210转轴所在的直线刚好穿过保护圈220的中心,使得螺旋桨210旋转所在的圆面被保护圈220包围,保护圈220可以有效避免外界干扰物与转动的螺旋桨210之间的碰撞,确保螺旋桨210正常运转而产生足够的推力,使整个机器人000稳定可靠的附着在工作面500上,防止脱落而损坏机器人000。
参阅图2和图3,支撑组件310包括支撑杆312和万向轮311,支撑杆312与框本体110所在的平面垂直,支撑杆312的一端与滑动销轴321连接,万向轮311则与支撑杆312的另一端连接,同一V字型安装杆121两端的驱动轮330关于两万向轮311之间的连线对称,因此,不管工作面500是平面还是曲面,万向轮311将始终与工作面500保持接触。
为增加机器人000与工作面500之间的接触面积,驱动轮330和万向轮311上均安装有橡胶轮套,橡胶轮套可以变形,在螺旋桨210推力的作用下,橡胶轮套产生的变形将使驱动轮330和万向轮311更加紧密的贴附在工作面500上(特别是工作面500为曲面时),进一步保证机器人000的攀附能力。
参阅图3,一般地,对于弯曲程度较高的曲面,传统的机器人000无法实现很好的攀附能力。对于本发明的机器人000,当其进入曲面时,例如曲率较大的凸面,两个万向轮311始终与工作面500接触,此时,驱动轮330处于与工作面500非接触的悬空状态,由于支撑杆312和万向轮311的总长度不会改变,在螺旋桨210推力的作用下,滑动销轴321将相对滑槽121a向上运动而挤压弹性件322,框架100将向靠近工作面500的方向运动(即向下运动),继而带动驱动轮330逐渐靠近工作面500。在驱动轮330向下运动的同时,滑动销轴321将通过连杆323和摇杆324的共同作用使驱动轮330绕铰接轴325逆时针摆动,驱动轮330产生一定的倾角,从而最终使驱动轮330与工作面500保持最大程度的接触。驱动轮330和万向轮311将共同对整个机器人000起到支撑作用,机器人000在新的工作面500上保持新的受力平衡。
参阅图2,相反,当机器人000从曲面行驶至平面时,万向轮311在重力和弹性件322弹力的作用下向下运动,滑动销轴321相对滑槽121a向下运动,连杆323带动摇杆324摆动,摇杆324与V字型安装杆121之间的夹角增大,驱动轮330顺时针摆动,重新使得驱动轮330和万向轮311在新的平衡状态下与工作面500之间均形成接触,保证机器人000可靠的附着在工作面500上。
同时,机器人000具备自动上墙(工作面500)能力,当机器人000准备从地面移动到墙面时,靠近墙面的螺旋桨210反转,远离墙面的螺旋桨210静止,从而对机器人000产生向上的拉力,将万向轮311往上抬升,同时,驱动轮330推动机器人000沿墙面运动,当所有驱动轮330均与墙面形成接触时,两个螺旋桨210同时正转,机器人000稳定的攀附在墙面上。
参阅图1和图4,进一步的,框架100上还设置有越障机构400,越障机构400包括第一越障轮410和第二越障轮420,第一越障轮410和第二越障轮420分别安装在框本体110的两个凸杆113的自由端上,第一越障轮410和第二越障轮420的中心到框本体110的距离均小于驱动轮330的中心到框本体110的距离,机器人000运动时,对于同一个自适应机构300,第一越障轮410和第二越障轮420均位于万向轮311的前上方。第一越障轮410和第二越障轮420沿其周向均开设防滑齿411,当防滑齿411与障碍物接触时,能增强摩擦力,便于第一越障轮410和第二越障轮420成功跨越障碍物。
参阅图4,具体的,第一越障轮410水平方向的直径与第一越障轮410所在圆周右边的交点形成最高点,从该最高点出发向驱动轮330做切线段600,处于该切线段600之下的障碍物均可以被跨越,同样的,第二越障轮420与第一越障轮410的工作原理相同。简而言之,障碍物的高度只要不超过第一越障轮410或第二越障轮420中心的高度,机器人000均能越过。当跨越障碍物时,第一越障轮410转动,将机器人000抬升一定的高度,从而使右边的驱动轮330和万向轮311跨过障碍物,当第二越障轮420与障碍物接触时,第二越障轮420同样将机器人000抬升一定高度,使左边的驱动轮330和万向轮311跨过障碍物,至此,机器人000成功跨越障碍物。
因此,机器人000能适应工作面500形貌的变化,并通过连杆滑块机构320改变驱动轮330的姿态,使万向轮311与驱动轮330均与工作面500相紧贴,能适用各种较大型结构曲面和较小曲率半径的圆柱面与圆锥面,尤其是圆柱管道的表面。机器人000不仅自适应能力强,移动速度快,而且越障能力好。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
爬壁机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0