








专利摘要
本实用新型公开了一种自动旋转式高空作业平台,其结构包括车轮、万向轴、驱动箱、检修窗、指示灯、升降架、支撑箱、固定螺丝、旋转板、防护栏、加固杆、控制按钮、旋转装置,本实用新型一种自动旋转式高空作业平台,结构上设有旋转装置,踩控制按钮,接着通过电控线来触发控制器进行运作,然后电机会被控制器控制启动,启动后带动螺纹杆进行旋转,旋转会使得螺纹传动壳与传动齿轮进行啮合传动,啮合传动后接着带动锥齿轮进行传动,当需要调整高空作业平台时,其旋转装置将对其进行自动旋转处理,使其在需要调整高空作业平台时能够起到及时的协调作用,降低调整高空作业平台时影响高空作业效率的现象。
权利要求
1.一种自动旋转式高空作业平台,其特征在于:其结构包括车轮(1)、万向轴(2)、驱动箱(3)、检修窗(4)、指示灯(5)、升降架(6)、支撑箱(7)、固定螺丝(8)、旋转板(9)、防护栏(10)、加固杆(11)、控制按钮(12)、旋转装置(13),所述车轮(1)内侧面与万向轴(2)外侧面相贴合,所述驱动箱(3)前端与检修窗(4)后端相嵌套,所述指示灯(5)位于升降架(6)下方,所述支撑箱(7)左侧面嵌入安装有固定螺丝(8),所述旋转板(9)上表面平行安装有防护栏(10),所述加固杆(11)底端设有控制按钮(12),所述旋转装置(13)嵌入安装于支撑箱(7)内部,所述旋转装置(13)包括电控线(1301)、控制器(1302)、电机(1303)、螺纹杆(1304)、螺纹传动壳(1305)、传动齿轮(1306)、锥齿轮(1307)、传动轴(1308)、旋转块(1309)、固定架(1310)、限位杆(1311),所述电控线(1301)右方与控制器(1302)左方电连接,所述电机(1303)右侧面安装有螺纹杆(1304),所述螺纹传动壳(1305)与传动齿轮(1306)相啮合,所述锥齿轮(1307)上表面与传动轴(1308)下表面位于同一中心线,所述旋转块(1309)底端设有固定架(1310),所述限位杆(1311)下方焊接于固定架(1310)上方,所述固定架(1310)位于加固杆(11)底端。
2.根据权利要求1所述的一种自动旋转式高空作业平台,其特征在于:所述万向轴(2)后端与驱动箱(3)前端相嵌套,所述检修窗(4)前方与指示灯(5)后方相连接。
3.根据权利要求1所述的一种自动旋转式高空作业平台,其特征在于:所述升降架(6)上表面与支撑箱(7)下表面相嵌套,所述固定螺丝(8)上方设有旋转板(9)。
4.根据权利要求1所述的一种自动旋转式高空作业平台,其特征在于:所述防护栏(10)前端垂直安装有加固杆(11),所述控制按钮(12)通过导线与旋转装置(13)相连接。
5.根据权利要求1所述的一种自动旋转式高空作业平台,其特征在于:所述加固杆(11)为长方体结构。
说明书
技术领域
本实用新型是一种自动旋转式高空作业平台,属于高空作业平台领域。
背景技术
高空作业平台是服务于各个行业高空作业、设备安装、检修等可移动性高空作业的产品。
现有技术公开了申请号为:201220177079.1的一种多功能三维旋转的高空作业平台,包括依次连接的支撑臂、旋转连接装置和托架,所述托架包括相互垂直设置的横托支架和侧靠支架,所述侧靠支架中部设置有安装座,所述安装座可旋转的连接所述旋转连接装置,所述旋转连接装置上设置有用于带动托架在水平面上旋转的水平旋转油缸和用于带动托架在重力面上旋转的垂直旋转油缸,但是该现有技术在使用高空作业平台时,由于高空作业平台较为固定,在调节作业方向时手动调节较为费时,从而影响高空作业效率。
实用新型内容
针对现有技术存在的不足,本实用新型目的是提供一种自动旋转式高空作业平台,以解决现有技术在使用高空作业平台时,由于高空作业平台较为固定,在调节作业方向时手动调节较为费时,从而影响高空作业效率的问题。
为了实现上述目的,本实用新型是通过如下的技术方案来实现:一种自动旋转式高空作业平台,其结构包括车轮、万向轴、驱动箱、检修窗、指示灯、升降架、支撑箱、固定螺丝、旋转板、防护栏、加固杆、控制按钮、旋转装置,所述车轮内侧面与万向轴外侧面相贴合,所述驱动箱前端与检修窗后端相嵌套,所述指示灯位于升降架下方,所述支撑箱左侧面嵌入安装有固定螺丝,所述旋转板上表面平行安装有防护栏,所述加固杆底端设有控制按钮,所述旋转装置嵌入安装于支撑箱内部,所述旋转装置包括电控线、控制器、电机、螺纹杆、螺纹传动壳、传动齿轮、锥齿轮、传动轴、旋转块、固定架、限位杆,所述电控线右方与控制器左方电连接,所述电机右侧面安装有螺纹杆,所述螺纹传动壳与传动齿轮相啮合,所述锥齿轮上表面与传动轴下表面位于同一中心线,所述旋转块底端设有固定架,所述限位杆下方焊接于固定架上方,所述固定架位于加固杆底端。
进一步地,所述万向轴后端与驱动箱前端相嵌套,所述检修窗前方与指示灯后方相连接。
进一步地,所述升降架上表面与支撑箱下表面相嵌套,所述固定螺丝上方设有旋转板。
进一步地,所述防护栏前端垂直安装有加固杆,所述控制按钮通过导线与旋转装置相连接。
进一步地,所述加固杆为长方体结构。
进一步地,所述指示灯高为5cm,半径为3cm。
进一步地,所述控制器的型号为FX1N10MRMTPLC,具有调试工作量小,所述电机的型号为JB527-97,具有效率高,噪音低的特点。
本实用新型一种自动旋转式高空作业平台,结构上设有旋转装置,踩控制按钮,接着通过电控线来触发控制器进行运作,然后电机会被控制器控制启动,启动后带动螺纹杆进行旋转,旋转会使得螺纹传动壳与传动齿轮进行啮合传动,啮合传动后接着带动锥齿轮进行传动,传动轴在传动中起到了协助的作用,最后旋转块会在传动齿轮与锥齿轮的各个啮合传动下进行旋转,由于旋转板与旋转块相连接是会一起被带动,这样便达到了旋转工作台的效果,其中固定架与限位杆使得旋转板旋转中不会发生偏移,保证旋转的有序性,当需要调整高空作业平台时,其旋转装置将对其进行自动旋转处理,使其在需要调整高空作业平台时能够起到及时的协调作用,降低调整高空作业平台时影响高空作业效率的现象。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
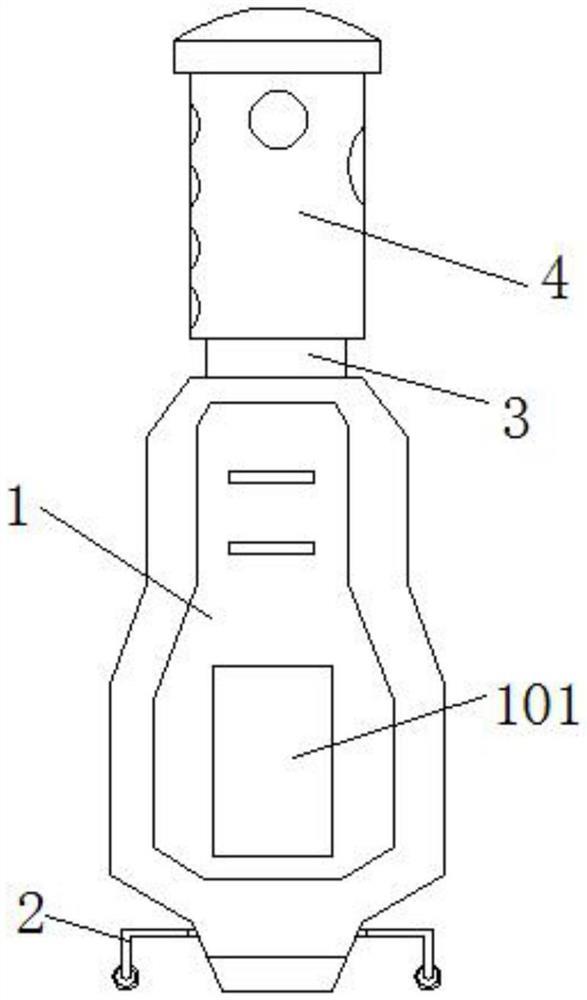
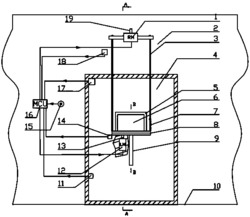
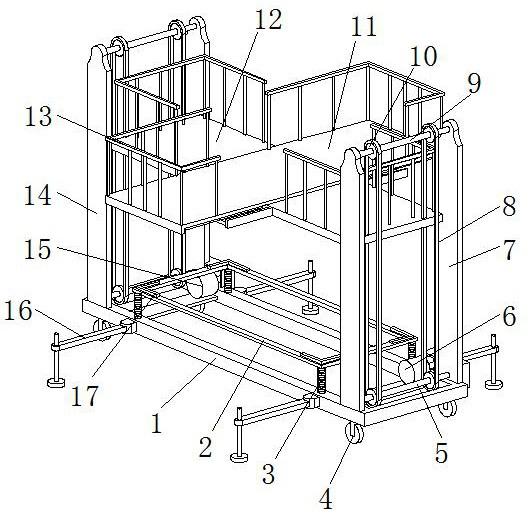
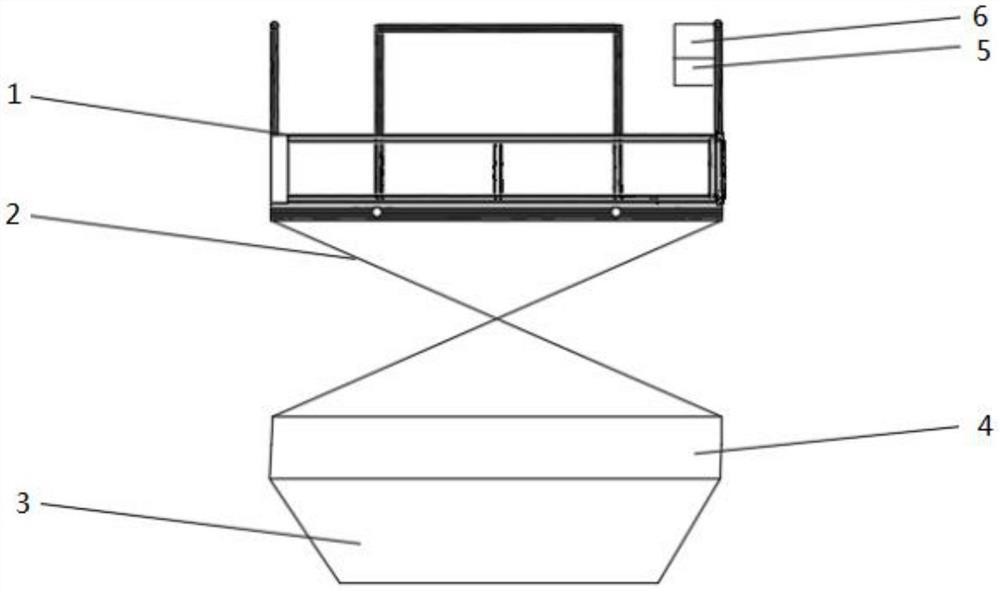
图1为本实用新型一种自动旋转式高空作业平台的结构示意图;
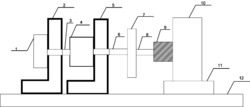
图2为本实用新型旋转装置的侧视剖面结构示意图。
图中:车轮-1、万向轴-2、驱动箱-3、检修窗-4、指示灯-5、升降架-6、支撑箱-7、固定螺丝-8、旋转板-9、防护栏-10、加固杆-11、控制按钮-12、旋转装置-13、电控线-1301、控制器-1302、电机-1303、螺纹杆-1304、螺纹传动壳-1305、传动齿轮-1306、锥齿轮-1307、传动轴-1308、旋转块-1309、固定架-1310、限位杆-1311。
具体实施方式
为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
请参阅图1、图2,本实用新型提供一种自动旋转式高空作业平台技术方案:其结构包括车轮1、万向轴2、驱动箱3、检修窗4、指示灯5、升降架6、支撑箱7、固定螺丝8、旋转板9、防护栏10、加固杆11、控制按钮12、旋转装置13,所述车轮1内侧面与万向轴2外侧面相贴合,所述驱动箱3前端与检修窗4后端相嵌套,所述指示灯5位于升降架6下方,所述支撑箱7左侧面嵌入安装有固定螺丝8,所述旋转板9上表面平行安装有防护栏10,所述加固杆11底端设有控制按钮12,所述旋转装置13嵌入安装于支撑箱7内部,所述旋转装置13包括电控线1301、控制器1302、电机1303、螺纹杆1304、螺纹传动壳1305、传动齿轮1306、锥齿轮1307、传动轴1308、旋转块1309、固定架1310、限位杆1311,所述电控线1301右方与控制器1302左方电连接,所述电机1303右侧面安装有螺纹杆1304,所述螺纹传动壳1305与传动齿轮1306相啮合,所述锥齿轮1307上表面与传动轴1308下表面位于同一中心线,所述旋转块1309底端设有固定架1310,所述限位杆1311下方焊接于固定架1310上方,所述固定架1310位于加固杆11底端,所述万向轴2后端与驱动箱3前端相嵌套,所述检修窗4前方与指示灯5后方相连接,所述升降架6上表面与支撑箱7下表面相嵌套,所述固定螺丝8上方设有旋转板9,所述防护栏10前端垂直安装有加固杆11,所述控制按钮12通过导线与旋转装置13相连接,所述加固杆11为长方体结构,所述指示灯5高为5cm,半径为3cm,所述控制器1302的型号为FX1N10MRMTPLC,具有调试工作量小,所述电机1303的型号为JB52797,具有效率高,噪音低的特点。
本专利所说的控制按钮12是设备常用的控制电器元件,常用来接通或断开‘控制电路’,从而达到控制电动机或其他电气设备运行目的的一种地下隧道施工设备开关,所述锥齿轮1307用来传递两相交轴之间的运动和动力,在一般机械中,锥齿轮两轴之间的交角等于90°,与圆柱齿轮类似。
例如,陈师傅对高空作业平台进行操作时,其中旋转装置13可以用来解决工作作业时产生的问题,首先用脚踩控制按钮12,接着通过电控线1301来触发控制器1302进行运作,然后电机1303会被控制器1302控制启动,启动后带动螺纹杆1304进行旋转,旋转会使得螺纹传动壳1305与传动齿轮1306进行啮合传动,啮合传动后接着带动锥齿轮1307进行传动,传动轴1308在传动中起到了协助的作用,最后旋转块1309会在传动齿轮1306与锥齿轮1307的各个啮合传动下进行旋转,由于旋转板9与旋转块1309相连接是会一起被带动,这样便达到了旋转工作台的效果,其中固定架1310与限位杆1311使得旋转板9旋转中不会发生偏移,保证旋转的有序性。
本实用新型解决了现有技术在使用高空作业平台时,由于高空作业平台较为固定,在调节作业方向时手动调节较为费时,从而影响高空作业效率的问题,本实用新型通过上述部件的互相组合,本实用新型一种自动旋转式高空作业平台,结构上设有旋转装置,踩控制按钮,接着通过电控线来触发控制器进行运作,然后电机会被控制器控制启动,启动后带动螺纹杆进行旋转,旋转会使得螺纹传动壳与传动齿轮进行啮合传动,啮合传动后接着带动锥齿轮进行传动,传动轴在传动中起到了协助的作用,最后旋转块会在传动齿轮与锥齿轮的各个啮合传动下进行旋转,由于旋转板与旋转块相连接是会一起被带动,这样便达到了旋转工作台的效果,其中固定架与限位杆使得旋转板旋转中不会发生偏移,保证旋转的有序性,当需要调整高空作业平台时,其旋转装置将对其进行自动旋转处理,使其在需要调整高空作业平台时能够起到及时的协调作用,降低调整高空作业平台时影响高空作业效率的现象。
以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
一种自动旋转式高空作业平台专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。



















动态评分
0.0