








专利摘要
本发明公开了一种三自由度并联机构,包括定平台、动平台、固定架与三个支链。每个支链均包括滑块滑轨组、四爪单动卡盘、调节垫片组、立柱、移动副、转动副、连杆和球面副。滑块滑轨组水平安装在定平台上,滑块上安装四爪单动卡盘,卡爪夹紧立柱,卡爪与立柱的下端之间安装调节垫片组,移动副与立柱连接,移动副与转动副连接,转动副的轴线与定平台的上平面平行,连杆的一端与转动副连接,连杆的另一端与球面副连接,球面副安装在动平台上,立柱上端安装在固定架上。本发明通过调节三个立柱安装的位置、误差及转过的角度,从而调节连杆的布置形式、结构尺寸与精度,调节方便,具有很好的经济效益与社会效益。
权利要求
1.一种三自由度并联机构,其特征在于,所述并联机构包括定平台(1)、动平台(2)、固定架(3)、第一支链(4)、第二支链(5)和第三支链(6);
第一支链(4)、第二支链(5)和第三支链(6)中的每一个支链均包括以下部件:
第一滑块滑轨组(41,51,61)、第一四爪单动卡盘(42,52,62)、第一调节垫片组(43,53,63)、第一立柱(44,54,64)、第一移动副(45,55,65)、第一转动副(46,56,66)、第一连杆(47,57,67)和第一球面副(48,58,68);
上述每个支链中所包括的部件的连接结构为:
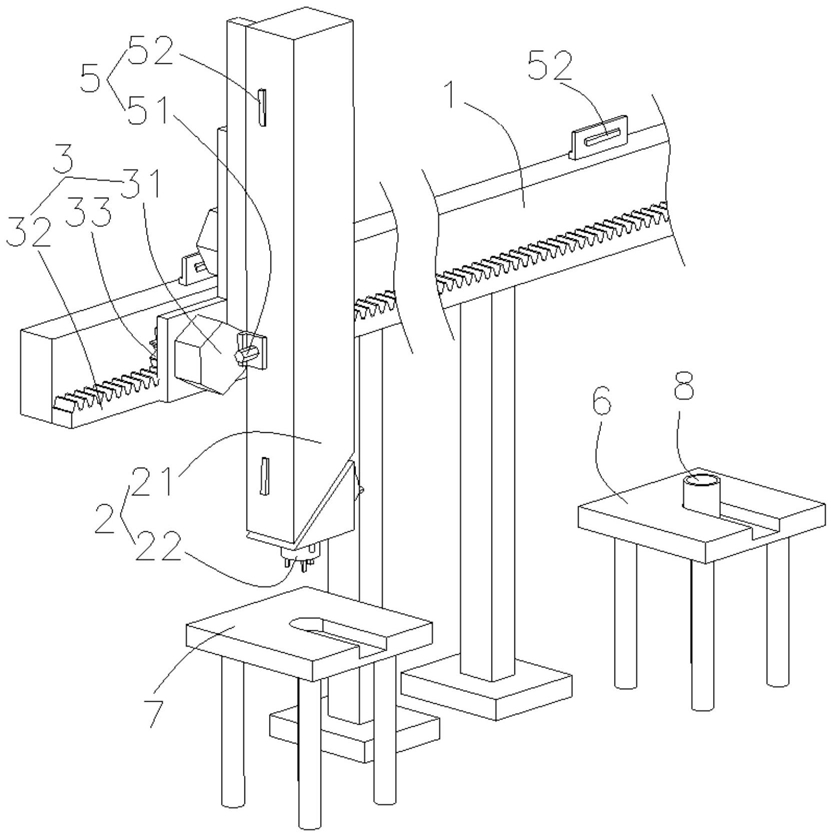
第一滑块滑轨组(41,51,61)的滑轨水平安装在定平台(1)上,第一滑块滑轨组(41,51,61)的滑块上安装第一四爪单动卡盘(42,52,62),第一四爪单动卡盘(42,52,62)的卡爪夹紧第一立柱(44,54,64)的下端,第一四爪单动卡盘(42,52,62)的卡爪与第一立柱(44,54,64)的下端之间安装第一调节垫片组(43,53,63),第一移动副(45,55,65)与第一立柱(44,54,64)连接,第一移动副(45,55,65)的轴线与定平台(1)上平面垂直,第一移动副(45,55,65)与第一转动副(46,56,66)连接,第一转动副(46,56,66)的轴线与定平台(1)的上平面平行,第一连杆(47,57,67)的一端与第一转动副(46,56,66)连接,第一连杆(47,57,67)的另一端与第一球面副(48,58,68)连接,第一球面副(48,58,68)安装在动平台(2)上,第一立柱(44,54,64)上端安装在固定架(3)上,通过螺钉采用顶紧的方法将第一立柱(44,54,64)上端安装在固定架(3)上;
三个滑块滑轨组(41,51,61)两两成120°夹角分布。
2.根据权利要求1所述的一种三自由度并联机构,其特征在于,固定架(3)上设置三个相同的夹紧槽对(31,32,33),每个夹紧槽对(31,32,33)均包含两个相同的夹紧槽,每个夹紧槽的两个侧板上都设置螺纹孔。
3.根据权利要求2所述的一种三自由度并联机构,其特征在于,第一立柱(44)、第二立柱(54)和第三立柱(64)中的每一个立柱均包括以下部件:第一立柱凸缘(441,541,641)、第一立柱主体(442,542,642)、第一立柱圆柱体(443,543,643)、第一立柱钢球(444,544,644)和第一立柱托盘(445,545,645)。
4.根据权利要求3所述的一种三自由度并联机构,其特征在于,第一立柱凸缘(441,541,641)安装于第一立柱主体(442,542,642)的上部,第一立柱圆柱体(443,543,643)安装于第一立柱主体(442,542,642)的下部,第一立柱圆柱体(443,543,643)的下部设置了一个球窝,第一立柱钢球(444,544,644)的上半部分置于球窝之内,第一立柱钢球(444,544,644)的下部置于第一立柱托盘(445,545,645)之内;
第一立柱托盘(445,545,645)安装在第一滑块滑轨组(41,51,61)的滑块上,第一立柱托盘(445,545,645)位于第一四爪单动卡盘(42,52,62)的卡爪孔内;第一立柱(44,54,64)上端的第一立柱凸缘(441,541,641)安装在固定架(3)的第一夹紧槽对(31,32,33)内,通过螺钉用上下两面顶紧的方式将第一立柱(44,54,64)上端的第一立柱凸缘(441,541,641)安装在固定架(3)的第一夹紧槽对(31,32,33)内。
5.根据权利要求4所述的一种三自由度并联机构,其特征在于,固定架(3)设置三个加强杆(34),三个加强杆(34)呈正三角形分布。
说明书
技术领域
本发明涉及一种三自由度并联机构,尤其是由一种由移动副、转动副和球面副构成的三自由度并联机构,属于机器人应用技术领域。
背景技术
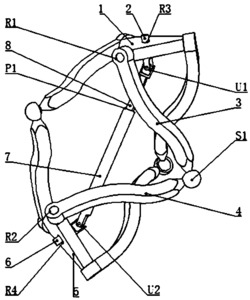
并联机器人与串联机器人是机器人的两大分支,在哲学上呈对立统一的关系,二者各有优缺点。并联机器人也称并联机构,它弥补了串联机器人的很多缺点,具有无累积误差、精度高、动态响应好、结构紧凑、刚性高、承载力大、各向同性等优点。具有三个自由度的3-PRS(P为移动副,R为转动副,S为球面副)并联机构是最典型的代表之一,它代表了一类机构,包含三个相同、对称的分支,并且每个分支都具有一个移动副、转动副与球面副。3-PRS并联机构的一些特殊构型已在工业生产中得到了成功应用。
由于各个支链之间互相耦合,再加上运动学与动力学方程中包含了三角函数、非线性方程组,工作空间、精度等性能评价、设计与优化的过程非常复杂。在研究的过程中,通常运用线性化等方法将问题简化,进而进行理论分析;然后与实验相结合,修改完善理论模型,得到针对某一类并联机构普适的模型。为了全面分析,就需要在不同的机构类型(连杆的布置形式)、机构尺寸、不同的机构精度下进行研究。目前常用的3-PRS并联机构是针对不同结构类型、不同机构尺寸、不同的精度要求分别搭建的,或者机构尺寸方面部分可调。但是机械部分搭建之后,精度都是固定的,这就导致了在实验研究的过程中,无法任意调整并联机构的误差。因此,当研究不同的结构类型、不同尺寸、不同精度的3-PRS并联机构时,只能重新加工零部件来搭建新的3-PRS并联机构。
发明内容
本发明针对一类3-PRS并联机构在研究不同的结构类型、不同尺寸、不同精度的过程中,需要重新搭建新的机械部分的技术问题,提供了一种3-PRS并联机构,通过调节三个立柱安装的位置、误差及转过的角度,从而调节连杆的布置形式、结构尺寸与精度,有效地解决了上述技术问题。
为了实现上述目的,本发明采取的技术方案是:一种三自由度并联机构,所述并联机构包括定平台1、动平台2、固定架3、第一支链4、第二支链5和第三支链6;
第一支链4、第二支链5和第三支链6中的每一个支链均包括以下部件:
第一滑块滑轨组41,51,61、第一四爪单动卡盘42,52,62、第一调节垫片组43,53,63、第一立柱44,54,64、第一移动副45,55,65、第一转动副46,56,66、第一连杆47,57,67和第一球面副48,58,68;
上述每个支链中所包括的部件的连接结构为:
第一滑块滑轨组41,51,61的滑轨水平安装在定平台1上,第一滑块滑轨组41,51,61的滑块上安装第一四爪单动卡盘42,52,62,第一四爪单动卡盘42,52,62的卡爪夹紧第一立柱44,54,64的下端,第一四爪单动卡盘42,52,62的卡爪与第一立柱44,54,64的下端之间安装第一调节垫片组43,53,63,第一移动副45,55,65与第一立柱44,54,64连接,第一移动副45,55,65的轴线与定平台1上平面垂直,第一移动副45,55,65与第一转动副46,56,66连接,第一转动副46,56,66的轴线与定平台1的上平面平行,第一连杆47,57,67的一端与第一转动副46,56,66连接,第一连杆47,57,67的另一端与第一球面副48,58,68连接,第一球面副48,58,68安装在动平台2上,第一立柱44,54,64上端安装在固定架3上,通过螺钉采用顶紧的方法将第一立柱44,54,64上端安装在固定架3上;
三个滑块滑轨组41,51,61两两成120°夹角分布。
进一步,固定架3上设置三个相同的夹紧槽对31,32,33,每个夹紧槽对31,32,33均包含两个相同的夹紧槽,每个夹紧槽的两个侧板上都设置螺纹孔。
进一步,第一立柱44、第二立柱54和第三立柱64中的每一个立柱均包括以下部件:第一立柱凸缘441,541,641、第一立柱主体442,542,642、第一立柱圆柱体443,543,643、第一立柱钢球444,544,644和第一立柱托盘445,545,645。
更进一步,第一立柱凸缘441,541,641安装于第一立柱主体442,542,642的上部,第一立柱圆柱体443,543,643安装于第一立柱主体442,542,642的下部,第一立柱圆柱体443,543,643的下部设置了一个球窝,第一立柱钢球444,544,644的上半部分置于球窝之内,第一立柱钢球444,544,644的下部置于第一立柱托盘445,545,645之内;
第一立柱托盘445,545,645安装在第一滑块滑轨组41,51,61的滑块上,第一立柱托盘445,545,645位于第一四爪单动卡盘42,52,62的卡爪孔内;第一立柱44,54,64上端的第一立柱凸缘441,541,641安装在固定架3的第一夹紧槽对31,32,33内,通过螺钉用上下两面顶紧的方式将第一立柱44,54,64上端的第一立柱凸缘441,541,641安装在固定架3的第一夹紧槽对31,32,33内。
再进一步,固定架3设置三个加强杆34,三个加强杆34呈正三角形分布。
本发明具有的有益的效果是:
(1)本发明的并联机构充分采用了技术十分成熟的四爪单动卡盘。四爪单动卡盘是机械加工行业应用非常广泛的机构,技术非常成熟,性能非常稳定,3-PRS并联机构搭建的过程中,可以直接从市场上以很便宜的价格购买四爪单动卡盘,具有很好的经济效益,并且大大缩短了并联机构搭建的时间。
(2)本发明中并联机构充分采用了技术十分成熟的调整垫片组,包括普通的垫片与微调垫片。使用调整垫片,可以灵活地调整立柱安装时倾斜的角度以及位置,进而加入需要的误差,实现精度的调整;再加上垫片结构简单、技术成熟,可以直接从市场上以很便宜的价格购买,损坏之后非常容易替换,并且大大缩短了并联机构搭建时间与调整时间,具有很好的经济效益与社会效益。
(3)本发明中的立柱下端设置了球窝、钢柱及托盘,在机构调整时,使立柱在垂直方向进行自动定位、立柱在圆周方向轻松灵活地转动;立柱下端设置了圆柱体部分,使立柱可以在绕自己垂直轴线转动的任意角度实现夹紧,使本发明提供的机构可以调节出大量的构型。
(4)本发明的并联机构上端设置了固定架,每个夹紧槽对都由两个夹紧槽构成,采用上下双面螺钉顶紧的方式夹紧,使立柱下端装夹时加入误差后,上端圆形凸缘夹紧时有上下调整的空间,提高了机构的稳定性与精度;固定架上设置了加强杆,增加了整个机构的刚性。
(5)本发明提供的并联机构充分采用了成熟、标准化、价格便宜、性能稳定的机构产品,机构搭建过程与调节方便,解决了3-PRS并联机构在不同的结构类型、不同尺寸、不同精度的过程中需要重新搭建新的机械部分的技术问题,具有很好的经济效益与社会效益。
附图说明
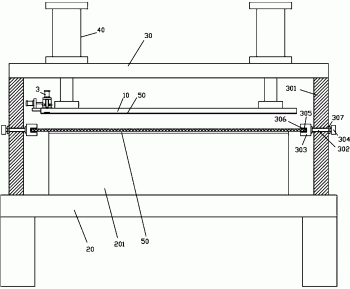
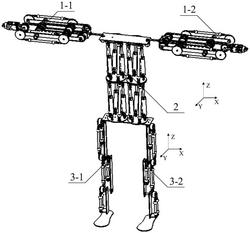
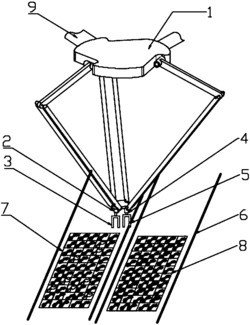
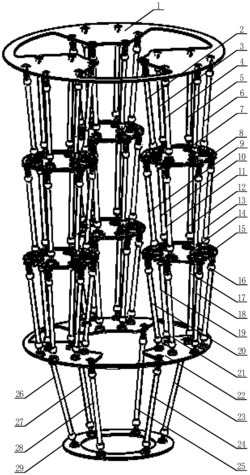
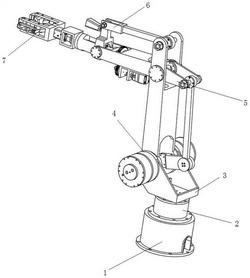
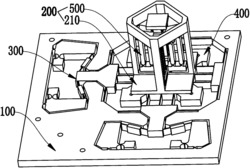
图1是本发明提供的并联机构装配简图;
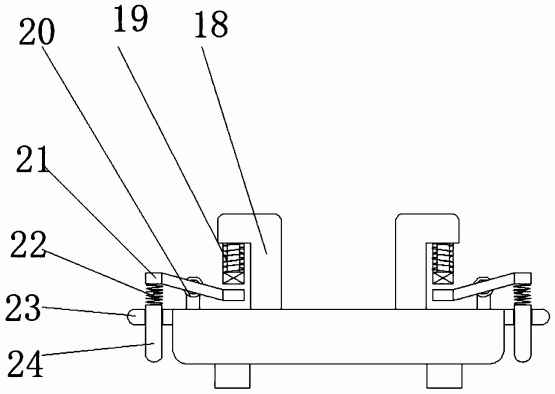
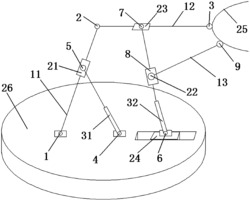
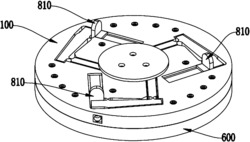
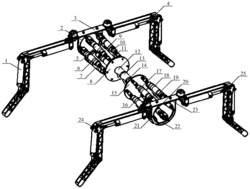
图2是本发明提供的并联机构中固定架的简图;
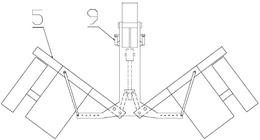
图3是本发明提供的并联机构中固定架的夹紧槽对的局部剖视图;
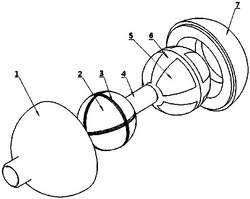
图4是本发明提供的并联机构中立柱的简图。
图中:1、定平台2、动平台3、固定架
4、第一支链5、第二支链6、第三支链
31、第一夹紧槽对32、第二夹紧槽对33、第三夹紧槽对
34、加强杆
41、第一调滑块滑轨组51、第二滑块滑轨组61、第三滑块滑轨组
42、第一四爪单动卡盘52、第二四爪单动卡盘62、第三四爪单动卡盘
43、第一调节垫片组53、第二调节垫片组63、第三调节垫片组
44、第一立柱54、第二立柱64、第三立柱
45、第一移动副55、第二移动副65、第三移动副
46、第一转动副56、第二转动副66、第三转动副
47、第一连杆57、第二连杆67、第三连杆
48、第一球面副58、第二球面副68、第三球面副
441、第一立柱凸缘541、第二立柱凸缘641、第三立柱凸缘
442、第一立柱主体542、第二立柱主体642、第三立柱主体
443、第一立柱圆柱体543、第二立柱圆柱体643、第三立柱圆柱体
444、第一立柱钢球544、第二立柱钢球644、第三立柱钢球
445、第一立柱托盘545、第二立柱托盘645、第三立柱托盘。
具体实施方式
以下结合附图及较佳实施例,对依据本发明提供的具体实施方式、结构、特征及其功效,详细说明如后。
如图1所示,本发明提供的一种三自由度并联机构,包括定平台1、动平台2、固定架3、第一支链4、第二支链5和第三支链6。三个支链包括的部件以及连接结构如下。
第一支链4:包括第一滑块滑轨组41、第一四爪单动卡盘42、第一调节垫片组43、第一立柱44、第一移动副45、第一转动副46、第一连杆47和第一球面副48;各个部件的连接结构为:第一滑块滑轨组41的滑轨水平安装在定平台1上,第一滑块滑轨组41的滑块上安装第一四爪单动卡盘42,第一四爪单动卡盘42的卡爪夹紧第一立柱44的下端,第一四爪单动卡盘42的卡爪与第一立柱44的下端之间安装第一调节垫片组43,第一移动副45与第一立柱44连接,第一移动副45的轴线与定平台1上平面垂直,第一移动副45与第一转动副46连接,第一转动副46的轴线与定平台1的上平面平行,第一连杆47的一端与第一转动副46连接,第一连杆47的另一端与第一球面副48连接,第一球面副48安装在动平台2上,第一立柱44上端安装在固定架3上,通过螺钉采用顶紧的方法将第一立柱44上端安装在固定架3上。
第二支链5:包括第二滑块滑轨组51、第二四爪单动卡盘52、第二调节垫片组53、第二立柱54、第二移动副55、第二转动副56、第二连杆57和第二球面副58;各个部件的连接结构为:第二滑块滑轨组51的滑轨水平安装在定平台1上,第二滑块滑轨组51的滑块上安装第二四爪单动卡盘52,第二四爪单动卡盘52的卡爪夹紧第二立柱54的下端,第二四爪单动卡盘52的卡爪与第二立柱54的下端之间安装第二调节垫片组53,第二移动副55与第二立柱54连接,第二移动副55的轴线与定平台1上平面垂直,第二移动副55与第二转动副56连接,第二转动副56的轴线与定平台1的上平面平行,第二连杆57的一端与第二转动副56连接,第二连杆57的另一端与第二球面副58连接,第二球面副58安装在动平台2上,第二立柱54上端安装在固定架3上,通过螺钉采用顶紧的方法将第二立柱54上端安装在固定架3上。
第三支链6:包括第三滑块滑轨组61、第三四爪单动卡盘62、第三调节垫片组63、第三立柱64、第三移动副65、第三转动副66、第三连杆67和第三球面副68;各个部件的连接结构为:第三滑块滑轨组61的滑轨水平安装在定平台1上,第三滑块滑轨组61的滑块上安装第三四爪单动卡盘62,第三四爪单动卡盘62的卡爪夹紧第三立柱64的下端,第三四爪单动卡盘62的卡爪与第三立柱64的下端之间安装第三调节垫片组63,第三移动副65与第三立柱64连接,第三移动副65的轴线与定平台1上平面垂直,第三移动副65与第三转动副66连接,第三转动副66的轴线与定平台1的上平面平行,第三连杆67的一端与第三转动副66连接,第三连杆67的另一端与第三球面副68连接,第三球面副68安装在动平台2上,第三立柱64上端安装在固定架3上,通过螺钉采用顶紧的方法将第三立柱64上端安装在固定架3上。
如图1所示,三个支链4、5、6中的三个滑块滑轨组41、51、61两两成120°夹角分布,三个滑块滑轨组41、51、61滑动的方向都沿着定平台1的径向方向。也就是说,三个滑块滑轨组41、51、61的滑动方向相交于一点,三个滑动方向两两成120°夹角。
如图2和图3所示,固定架3上设置三个相同的夹紧槽对31、32、33,每个夹紧槽对31、32、33均包含两个相同的夹紧槽,这两个夹紧槽的开口正对,每个夹紧槽的两个侧板上都设置螺纹孔,这里的两个侧板指的是组成夹紧槽的三个平板中平行的那两个。
如图4所示,第一立柱44、第二立柱54和第三立柱64中的每一个立柱均包括相同的部件。第一立柱44包括:第一立柱凸缘441、第一立柱主体442、第一立柱圆柱体443、第一立柱钢球444和第一立柱托盘445;第二立柱54包括:第二立柱凸缘541、第二立柱主体542、第二立柱圆柱体543、第二立柱钢球544和第二立柱托盘545;第三立柱64包括:第三立柱凸缘641、第三立柱主体642、第三立柱圆柱体643、第三立柱钢球644和第三立柱托盘645。
其中,第一立柱凸缘441、第二立柱凸缘541、第三立柱凸缘641都是圆形的;第一立柱托盘445、第二立柱托盘545、第三立柱托盘645都是圆形的,三个托盘内侧的底部是平的,也就是说,每个托盘的内外都是平底结构。
如图1所示,第一立柱凸缘441安装于第一立柱主体442的上部,第一立柱圆柱体443安装于第一立柱主体442的下部,第一立柱圆柱体443的下部设置了一个球窝,第一立柱钢球444的上半部分置于球窝之内,第一立柱钢球444的下部置于第一立柱托盘445之内;第一立柱托盘445安装在第一滑块滑轨组41的滑块上,第一立柱托盘445位于第一四爪单动卡盘42的卡爪孔内;第一立柱44上端的第一立柱凸缘441安装在固定架3的第一夹紧槽对31内,通过螺钉用上下两面顶紧的方式将第一立柱44上端的第一立柱凸缘441安装在固定架3的第一夹紧槽对31内。第二立柱54和第三立柱64中各个部件之间以及与定平台1、固定架3的连接结构与第一立柱44完全相同。
如图2所示,固定架3上设置了三个加强杆34,三个加强杆34呈正三角形分布。固定架3包含了三个完全相同的部分,这三部分以120°夹角均布,分别对应于3-PRS并联机构的三个分支。
固定架3可以不是一个整体,由三个完全相同的部件组合而成,有如下两种结构:
(1)分成的这三个部件分别对应于3-PRS并联机构的三个分支,也就是说,第一夹紧槽对31、第二夹紧槽对32、第三夹紧槽对33分别在三个不同的部件上;(2)分成的这三个部件,每个部件对应于3-PRS并联机构的两个分支,即按照图2中的三个中心线进行分割,也就是说,每个部件包含两个夹紧槽,这两个夹紧槽连接着同一个加强杆34。
如果3-PRS并联机构的负载很重,需要很强的承重能力,则通过立柱将固定架3连接在定平台1上。
如图3与图4所示,第三夹紧槽对33中的两个加紧槽远离固定架3的中心的那一端的开口处是分离的;而在固定架中心的那一端,两个加筋槽的开口的下部是分离的,上部是平板连接的,以提高固定架的强度。第一夹紧槽对31、第二夹紧槽对32的结构都与第三夹紧槽对33相同。
第一调节垫片组43、第二调节垫片组53、第三调节垫片组63都包含了普通垫片与微调垫片,微调垫片可以实现微小的距离调整,与四爪单动卡盘夹紧时每个卡爪的进给距离相配合,实现无级调节。通过调整上下垫片的厚度,可以调整第一立柱44、第二立柱54、第三立柱64倾斜的角度。
第一滑块滑轨组41、第二滑块滑轨组51、第三滑块滑轨组61中的滑块可以沿着各自的滑轨滑动,到达要求的位置时通过锁紧机构锁紧。第一立柱44、第二立柱54、第三立柱64与定平台1的中心的距离通过第一滑块滑轨组41、第二滑块滑轨组51、第三滑块滑轨组61进行调节。
第一立柱圆柱体443、第二立柱圆柱体543、第三立柱圆柱体643下部的球窝,第一立柱钢球444、第二立柱钢球544、第三立柱钢球644,第一立柱托盘445、第二立柱托盘545、第三立柱托盘645,在第一立柱44、第二立柱54、第三立柱64调整时,上述的这些球窝、钢球、托盘在垂直方向上起定位作用。这种结构,使第一立柱44、第二立柱54、第三立柱64在各自的托盘限定的范围内在水平面上任意移动。
本发明在应用的时候,与第一立柱钢球444、第二立柱钢球544、第三立柱钢球644相接触的球窝与第一立柱托盘445、第二立柱托盘545、第三立柱托盘645都要做好充分润滑,以减小磨损、保持机构的精度、提高调整时的灵活度。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,本领域技术人员利用上述提示的技术内容做出的简单修改、等同变化或修饰,均落在本发明的保护范围内。
一种三自由度并联机构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0