







专利摘要
本发明公开了空间运动刚体上一点运动轨迹的追踪与再现方法。在被测构件的测量空间布置2个以上激光跟踪仪,使其测量范围依次覆盖被测点在不同时段的运动范围,通过各激光跟踪仪局部坐标系与静坐标系之间坐标变换关系使测量数据统一基准;通过将坐标变换后的各激光跟踪仪测量数据在同一坐标系中以不同的线型或颜色显示,最终获取被测的空间运动刚体上一点运动轨迹与其运动时间之间的精确对应关系,解决了单激光跟踪仪数据采集不全和多激光跟踪仪测量数据冗余的技术难题,具有简单、直观的优点,且各激光跟踪仪测量数据经数据处理后,其中所包含的空间运动刚体上一点运动轨迹的信息,可既不重复又不遗漏的精确再现。
权利要求
1.空间运动刚体上一点运动轨迹的追踪与再现方法,其特征在于,包括步骤:
被测构件开始空间运动,激光跟踪仪采集数据;
对激光跟踪仪采集的数据进行处理;
被测点运动轨迹再现的图形绘制;
其中,在被测构件周围,共设置i+1个激光跟踪仪,i为不小于1的整数,这些激光跟踪仪依次为第1个激光跟踪仪、……、第i个激光跟踪仪和第i+1个激光跟踪仪,并使多个激光跟踪仪的测量范围依次覆盖被测构件上的被测点在不同时段的运动范围;
在被测构件做空间运动的过程中,第1个激光跟踪仪至第i+1个激光跟踪仪能依次对被测构件上的测量点进行测量,进行数据的采集;
在对激光跟踪仪采集的数据进行处理时,记固结在第i个激光跟踪仪上的动坐标系为OiXiYiZi,记第i个激光跟踪仪的采集数据为[xi(t),yi(t),zi(t)],变换到静坐标系OXYZ中的对应坐标为[
其中,xi0、yi0、zi0为固定在第i个激光跟踪仪上的动坐标系OiXiYiZi的坐标原点Oi在静坐标系OXYZ中的3个坐标分量;
“·”为向量点乘运算符合,e1
在对激光跟踪仪采集的数据进行处理时,记固结在第i+1个激光跟踪仪上的动坐标系Oi+1Xi+1Yi+1Zi+1,记第i+1个激光跟踪仪的采集数据为:[xi+1(t),yi+1(t),zi+1(t)],变换到静坐标系OXYZ中的对应坐标为[
其中,xi+1,0,yi+1,0,zi+1,0为固定在第i+1个激光跟踪仪上的动坐标系Oi+1Xi+1Yi+1Zi+1的坐标原点Oi+1在静坐标系OXYZ中的3个坐标分量;
“·”为向量点乘运算符合,e1
基于变换到静坐标系OXYZ中的被测点坐标[
2.根据权利要求1所述的空间运动刚体上一点运动轨迹的追踪与再现方法,其特征在于,每个激光跟踪仪的测量范围,以其跟踪头靶镜为中心,由水平面的转角区间和铅垂面的转角区间构成;每个激光跟踪仪的测量光线涵盖的范围呈以跟踪头靶镜为顶点的四棱锥形状,与该顶点相邻的四个平面分别为水平面的转角区间边界和铅垂面的转角区间边界。
3.根据权利要求2所述的空间运动刚体上一点运动轨迹的追踪与再现方法,其特征在于,在动坐标系OiXiYiZi的OiXi轴、OiYi轴和OiZi轴上分别取Pi、Qi、Mi三点,Pi、Qi、Mi三点在静坐标系中的坐标分别为Pi(xPi,yPi,zPi),Qi(xQi,yQi,zQi),Mi(xMi,yMi,zMi);
4.根据权利要求2所述的空间运动刚体上一点运动轨迹的追踪与再现方法,其特征在于,在Oi+1Xi+1Yi+1Zi+1的Oi+1Xi+1轴、Oi+1Yi+1轴和Oi+1Zi+1轴上分别取Pi+1、Qi+1、Mi+1三点,Pi+1、Qi+1、Mi+1三点在静坐标系中的坐标分别为Pi+1(xPi+1,yPi+1,zPi+1),Qi+1(xQi+1,yQi+1,zQi+1),Mi+1(xMi+1,yMi+1,zMi+1);
5.根据权利要求2至4任一所述的空间运动刚体上一点运动轨迹的追踪与再现方法,其特征在于,在平面直角坐标系中,分别绘制被测点x坐标与其运动时间之间对应关系图、被测点y坐标与其运动时间之间对应关系图和被测点z坐标与其运动时间之间对应关系图。
6.根据权利要求5所述的空间运动刚体上一点运动轨迹的追踪与再现方法,其特征在于,在同一个三维直角坐标系中,绘制被测点运动轨迹曲线图。
7.根据权利要求2至4任一所述的空间运动刚体上一点运动轨迹的追踪与再现方法,其特征在于,做空间运动的被测构件为串联机器人的机械臂,在该机械臂上布置反光镜,并在机械臂的周围放置第i个和第i+1个激光跟踪仪。
说明书
技术领域
本发明属于空间机构运动学参数测量技术领域,具体地说,本发明涉及一种空间运动刚体上一点运动轨迹的追踪与再现方法。
背景技术
空间机构传动中,因主动件的运动多为纯转动或纯移动,其位移传感器布置较为方便;而执行构件多为空间复杂运动,因位移传感器布置困难致使其运动学参数,如线(角)位移、线(角)速度和线(角)加速度的在线测量难以实施。
授权公告号为CN103925854B的发明专利公开了一种基于三维坐标转换原理的导弹水平测量方法,其是将数字化测量技术与三维坐标转换原理结合,集成应用于导弹水平测量中,实现了高精度、高效率的数字化水平测量,使得导弹在任意姿态下,能够获得同一坐标系下全尺寸导弹各测量点的空间三维坐标,并且对于测量基准所在的部件无法在总装装配过程参与水平测量的情况下,对其工艺件进行分段测量,最后通过坐标转换计算方法实现了同一基准下的测量点坐标位置评估及对比分析。
公开号为CN105241378A的发明专利公开了一种基于激光跟踪技术的变电站3D实景重绘方法,其是通过结合激光跟踪仪的单点跟踪测量技术和线激光扫描技术实现了大型静态场景的全局测量。
以上两个发明专利解决了大型静态物体或大型静态场景的静态测量问题。其技术特点是,采用同一激光跟踪仪或电子经纬仪等,进行分段分片多次测量,再在同一坐标系下进行大型物体或场景的空间曲面重构,以获得全局测量结果;均为多次、非同时测量,分段分片顺序可以与测量时间不严格对应!
但是,采用单激光跟踪仪追踪空间机构上被测构件的运动学参数变化时,因其测量范围限制,必然存在跟踪盲区和对应的数据采集不全问题;若采用单激光跟踪仪多次跟踪测量,又难以得到被测构件位置坐标与被测构件运动时间之间的精确对应关系。
发明内容
为了解决单激光跟踪仪追踪空间机构上被测构件时存在的跟踪盲区和多次测量又难以得到被测构件位置坐标与其运动时间之间精确对应关系的技术难题,本发明公开了空间运动刚体上一点运动轨迹的追踪与再现方法。
为了实现上述目的,本发明采取的技术方案为:空间运动刚体上一点运动轨迹的追踪与再现方法,包括步骤:
被测构件开始空间运动,激光跟踪仪采集数据;
对激光跟踪仪采集的数据进行处理;
被测点运动轨迹再现的图形绘制。
在被测构件周围,分别放置第i个激光跟踪仪和第i+1个激光跟踪仪,i为不小于1的整数,并使多个激光跟踪仪的测量范围依次覆盖被测构件上的被测点在不同时段的运动范围。
在对激光跟踪仪采集的数据进行处理时,记固结在第i个激光跟踪仪上的动坐标系为OiXiYiZi,记第i个激光跟踪仪的采集数据为[xi(t),yi(t),zi(t)],变换到静坐标系OXYZ中的对应坐标为[
其中,xi0、yi0、zi0为固定在第i个激光跟踪仪上的动坐标系OiXiYiZi的坐标原点Oi在静坐标系OXYZ中的3个坐标分量;
“·”为向量点乘运算符合,e1
在动坐标系OiXiYiZi的OiXi轴、OiYi轴和OiZi轴上分别取Pi、Qi、Mi三点,Pi、Qi、Mi三点在静坐标系中的坐标分别为Pi(xPi,yPi,zPi),Qi(xQi,yQi,zQi),Mi(xMi,yMi,zMi);
在对激光跟踪仪采集的数据进行处理时,记固结在第i+1个激光跟踪仪上的动坐标系Oi+1Xi+1Yi+1Zi+1,记第i+1个激光跟踪仪的采集数据为:[xi+1(t),yi+1(t),zi+1(t)],变换到静坐标系OXYZ中的对应坐标为[
其中,xi+1,0,yi+1,0,zi+1,0为固定在第i+1个激光跟踪仪上的动坐标系Oi+1Xi+1Yi+1Zi+1的坐标原点Oi+1在静坐标系OXYZ中的3个坐标分量;
“·”为向量点乘运算符合,e1
在Oi+1Xi+1Yi+1Zi+1的Oi+1Xi+1轴、Oi+1Yi+1轴和Oi+1Zi+1轴上分别取Pi+1、Qi+1、Mi+1三点,Pi+1、Qi+1、Mi+1三点在静坐标系中的坐标分别为Pi+1(xPi+1,yPi+1,zPi+1),Qi+1(xQi+1,yQi+1,zQi+1),Mi+1(xMi+1,yMi+1,zMi+1);
基于变换到静坐标系OXYZ中的被测点坐标[
在平面直角坐标系中,分别绘制被测点x坐标与其运动时间之间对应关系图、被测点y坐标与其运动时间之间对应关系图和被测点z坐标与其运动时间之间对应关系图。
在同一个三维直角坐标系中,绘制被测点运动轨迹曲线图。
本发明的空间运动刚体上一点运动轨迹的追踪与再现方法,采用多个(两套以上)激光跟踪仪对同一空间运动对象进行追踪,在测量空间将2个以上激光跟踪仪进行合理布置,使这些激光跟踪仪的测量范围,依次覆盖被测空间运动构件上被测点在不同时段的运动范围,以解决单激光跟踪仪存在的跟踪盲区和对应的数据采集不全问题。
被测对象(指串联机器人机械臂、并联机器人动平台、混联机器人执行系统、以及空间机构连杆等作空间复杂运动的构件)装备总成、参与测量的各激光跟踪仪开机预热,并将各激光跟踪仪数据精度、采样时间设置为相同数值,并注意装备总成开始运动时刻与各激光跟踪仪开始数据采集时刻保持相同,以解决各激光跟踪仪测量的同时性问题。
建立各激光跟踪仪的局部坐标系与静坐标系之间的坐标变换关系,将各激光跟踪仪的测量数据(局部坐标)统一到静坐标系中。
显然,测量中还必然会出现2种情况:(1)任一台激光跟踪仪,因测量范围限制,其测量数据可能会不包含被测点的全部运动位置信息,因此,最终测量结果须将参与测量的多台激光跟踪仪的测量数据加以综合;(2)相邻两激光跟踪仪,因其追踪区域有重叠,其测量数据可能会共同含有被测点在某一范围内的位置信息。因此,最终的测量结果取所有激光跟踪仪测量数据的并集。具体方法是,将各激光跟踪仪的测量数据(局部坐标)通过坐标变换转化为静坐标,通过计算机图形技术,将不同激光跟踪仪的测量数据(静坐标)以不同的线型或颜色在静坐标系中显示、拼接,不同线型或颜色的重叠部分数据取其并集;最终实现基于多激光跟踪仪的空间运动刚体上一点运动轨迹的追踪与再现,输出被测的空间运动刚体上一点x坐标与其运动时间之间对应关系图、被测的空间运动刚体上一点y坐标与其运动时间之间对应关系图、被测的空间运动刚体上一点z坐标与其运动时间之间对应关系图和在静坐标系下被测的空间运动刚体上一点运动轨迹曲线。
本发明的空间运动刚体上一点运动轨迹的追踪与再现方法,具有如下有益效果:
(1)通过多台激光跟踪仪追踪空间运动构件上同一点的运动轨迹,并采用坐标变换和计算机图形显示技术对多台激光跟踪仪的测量数据加以综合处理,最终可以获取被测的空间运动刚体上一点运动轨迹与其运动时间之间的精确对应关系;解决了现有技术中采用同一激光跟踪仪等测量装置通过多次、非同时测量,并辅以数据处理技术虽可实现静态大型物体或场景在同一坐标系下的空间曲面重构,但无法获取空间运动物体的动态位置姿态与其运动时间之间精确对应关系信息的技术难题;
(2)多台激光跟踪仪同时追踪空间运动构件上同一点的运动轨迹时,因每台激光跟踪仪的测量数据是相对其自身的局部坐标系给出的,故存在数据基准不统一的问题;因每台激光跟踪仪的测量范围有限,必然存在跟踪盲区和对应的数据采集不全问题;而相邻两台激光跟踪仪因测量范围有重叠,又必然存在测量数据冗余问题;本发明通过建立各激光跟踪仪局部坐标系与静坐标系之间坐标变换关系解决了测量数据基准不统一的问题,通过计算机图形技术,将经过坐标变换后的各激光跟踪仪测量数据在同一坐标系中显示,并将不同激光跟踪仪的测量数据设置为不同的线型或颜色,解决了单激光跟踪仪数据采集不全问题和多激光跟踪仪测量数据冗余问题,具有简单、直观的优点,且各激光跟踪仪测量数据经数据处理后,其中所包含的空间运动刚体上一点运动轨迹的信息,可既不重复又不遗漏的精确再现。
附图说明
本说明书包括以下附图,所示内容分别是:
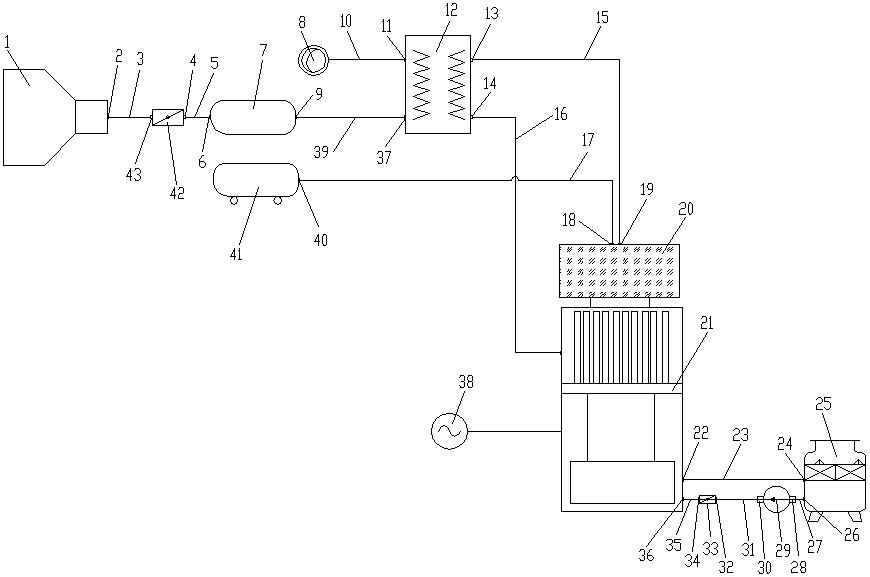
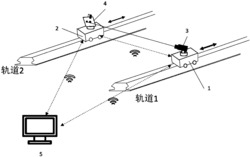
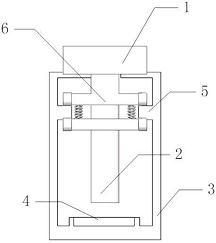
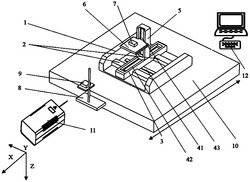
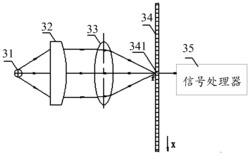
图1本发明技术方案所述的系统布置示意图;
图2被测点x坐标与其运动时间之间对应关系示意图;
图3被测点y坐标与其运动时间之间对应关系示意图;
图4被测点z坐标与其运动时间之间对应关系示意图;
图5在静坐标系下被测点运动轨迹曲线;
图中标记为:
1、被测构件;2、激光跟踪仪;3、反光镜;4、与第i个激光跟踪仪测量数据对应的曲线;5、与第i+1个激光跟踪仪测量数据对应的曲线。
具体实施方式
下面对照附图,通过对实施例的描述,对本发明的具体实施方式作进一步详细的说明,目的是帮助本领域的技术人员对本发明的构思、技术方案有更完整、准确和深入的理解,并有助于其实施。
本发明提供了一种基于多激光跟踪仪的空间运动刚体上一点运动轨迹的追踪与再现方法,实施步骤如下:
步骤1:设备准备。如图1所示,在被测构件的周围,共设置i+1个激光跟踪仪,i为不小于1的整数,这些激光跟踪仪依次为第1个激光跟踪仪、……、第i个激光跟踪仪和第i+1个激光跟踪仪。每个激光跟踪仪的测量范围,以其跟踪头靶镜为中心,由水平面的转角区间和铅垂面的转角区间构成;每个激光跟踪仪的测量光线涵盖的范围呈以跟踪头靶镜为顶点的四棱锥形状,与该顶点相邻的四个平面分别为水平面的转角区间边界和铅垂面的转角区间边界。i+1个激光跟踪仪的空间位置放置原则是:以各激光跟踪仪跟踪头靶镜为顶点的四棱锥形状的测量范围依次覆盖被测构件上的被测点在不同时段的运动范围。
在被测构件上布置反光镜,反光镜所在位置为被测点。被测构件为做空间运动的刚体,其是作为被测对象装备总成的一个构件,如串联机器人的机械臂、并联机器人的动平台、混联机器人的执行系统、以及空间机构的连杆等作空间复杂运动的构件。被测对象装备总成、参与测量的各激光跟踪仪开机预热,并将各激光跟踪仪数据精度、采样时间设置为相同数值。
步骤2:被测构件开始空间运动,各个激光跟踪仪开始采集数据。被测对象装备总成和各激光跟踪仪同时开始运行,使被测对象装备总成开始运动时刻与各激光跟踪仪开始数据采集时刻保持相同。在被测构件做空间运动的过程中,第1个激光跟踪仪至第i+1个激光跟踪仪能依次对被测构件上的测量点进行测量,进行数据的采集。
步骤3:将i+1个激光跟踪仪的测量数据导入计算机,进行数据处理。
对于总共i+1个激光跟踪仪采集的测量数据,在进行数据处理时,对各个激光跟踪仪的测量数据的处理过程主要是将各测量数据[x(t),y(t),z(t)]变换到静坐标系OXYZ中的对应坐标为[
在第i个激光跟踪仪上建立动坐标系,记固结在第i个激光跟踪仪上的动坐标系为OiXiYiZi,记第i(i为不小于1的整数)个激光跟踪仪的测量数据(组)为:[xi(t),yi(t),zi(t)],变换到静坐标系OXYZ中的对应坐标为[
在第i+1个激光跟踪仪上建立动坐标系,记固结在第i+1个激光跟踪仪上的动坐标系Oi+1Xi+1Yi+1Zi+1,记第i+1个激光跟踪仪的测量数据(组)为:[xi+1(t),yi+1(t),zi+1(t)],变换到静坐标系OXYZ中的对应坐标为[
由动坐标系OiXiYiZi到静坐标系OXYZ的坐标变换方法,由下列式(1)—式(8)确定,为:
其中:xi0、yi0、zi0为固定在第i个激光跟踪仪上的动坐标系OiXiYiZi的坐标原点Oi在静坐标系OXYZ中的3个坐标分量。
其中,“·”为向量点乘运算符合,而静坐标系OXYZ的三个坐标轴所对应的单位向量为:
为动坐标系OiXiYiZi的OiXi轴在静坐标系OXYZ中的单位向量;
为动坐标系OiXiYiZi的OiYi轴在静坐标系OXYZ中的单位向量;
为动坐标系OiXiYiZi的OiZi轴在静坐标系OXYZ中的单位向量。
设动坐标系OiXiYiZi的OiXi轴、OiYi轴和OiZi轴上分别取Pi、Qi、Mi三点,Pi、Qi、Mi三点在静坐标系中的坐标分别为Pi(xPi,yPi,zPi),Qi(xQi,yQi,zQi),Mi(xMi,yMi,zMi);则 和 的计算方法,如下列式(6)—(8),为:
由动坐标系Oi+1Xi+1Yi+1Zi+1到静坐标系OXYZ的坐标变换方法,由下列式(9)至式(13)及式(3)到(5)确定,为:
其中:xi+1,0、yi+1,0、zi+1,0为固定在第i+1个激光跟踪仪上的动坐标系Oi+1Xi+1Yi+1Zi+1的坐标原点Oi+1在静坐标系OXYZ中的3个坐标分量。
其中,“·”为向量点乘运算符合,而静坐标系OXYZ的三个坐标轴所对应的单位向量 和 由式(3)—式(5)确定;
为动坐标系Oi+1Xi+1Yi+1Zi+1的Oi+1Xi+1轴在静坐标系中的单位向量;
为动坐标系Oi+1Xi+1Yi+1Zi+1的Oi+1Yi+1轴在静坐标系中的单位向量;
为动坐标系Oi+1Xi+1Yi+1Zi+1的Oi+1Zi+1轴在静坐标系中的单位向量。
设动坐标系Oi+1Xi+1Yi+1Zi+1的Oi+1Xi+1轴、Oi+1Yi+1轴和Oi+1Zi+1轴上分别取Pi+1、Qi+1、Mi+1三点,Pi+1、Qi+1、Mi+1三点在静坐标系中的坐标分别为Pi+1(xPi+1,yPi+1,zPi+1)、Qi+1(xQi+1,yQi+1,zQi+1)、Mi+1(xMi+1,yMi+1,zMi+1);则 和 的计算公式如下:
i为不小于1的整数,当被测构件的周围共设置2个激光跟踪仪时,i=1,第i个激光跟踪仪即为第1个激光跟踪仪,第i+1个激光跟踪仪即为第2个激光跟踪仪;当被测构件的周围共设置多于2个激光跟踪仪时,对于第1个激光跟踪仪至第i-1个激光跟踪仪的测量数据处理过程与上述第i个、第i+1个激光跟踪仪的处理过程相同,主要是将各测量数据[x(t),y(t),z(t)]变换到静坐标系OXYZ中的对应坐标为[
步骤4:被测点运动轨迹再现的图形绘制。
在对总共i+1个激光跟踪仪采集的测量数据导入计算机中进行处理后,基于处理后获得的测量数据,进行数据图形化显示,并注意将各个激光跟踪仪的测试数据以不同的线形或颜色加以区分。
如图2、图3、图4和图5所示,基于变换到静坐标系OXYZ中的第i(i为不小于1的整数)个激光跟踪仪的测量数据[
如图2、图3和图4所示,在进行数据图形化显示,在平面直角坐标系中,基于处理后获得的测量数据,分别绘制被测点x坐标与其运动时间之间对应关系图、被测点y坐标与其运动时间之间对应关系图和被测点z坐标与其运动时间之间对应关系图。
如图5所示,基于处理后获得的测量数据,在同一个三维直角坐标系中,采用matlab(matrix&laboratory)软件绘制被测点运动轨迹曲线图。
实施例1
如图1所示,在本实施例中,被测对象装备总成为串联机器人,做空间运动的被测构件为串联机器人的机械臂,在该机械臂(即被测构件1)上布置反光镜3(即测量点),并在机械臂的周围放置第i个和第i+1个激光跟踪仪2。
放置第i个激光跟踪仪时,使动坐标系OiXiYiZi与静坐标系OXYZ的三个坐标轴同向平行,即,OX平行于OiXi,OY平行于OiYi,OZ平行于OiZi,又测得:xi0=0.20,单位为米;yi0=-2,单位为米;zi0=0.40,单位为米;又在动坐标系OiXiYiZi的OiXi轴、OiYi轴和OiZi轴上分别取Pi、Qi、Mi三点,Pi、Qi、Mi三点在静坐标系中的坐标分别为Pi(xPi,yPi,zPi)、Qi(xQi,yQi,zQi)、Mi(xMi,yMi,zMi);经计算可得:
故有:
放置第i+1个激光跟踪仪时,使动坐标系Oi+1Xi+1Yi+1Zi+1与静坐标系OXYZ的z坐标轴同向平行,其余两坐标轴反向平行,即,OX平行于Xi+1Oi+1,OY平行于Yi+1Oi+1,OZ平行于Oi+1Zi+1,又测得:xi+1,0=0.25,单位为米;yi+1,0=2,单位为米;zi+1,0=0.40,单位为米;又在动坐标系Oi+1Xi+1Yi+1Zi+1的Oi+1Xi+1轴、Oi+1Yi+1轴和Oi+1Zi+1轴上分别取Pi+1、Qi+1、Mi+1三点,Pi+1、Qi+1、Mi+1三点在静坐标系中的坐标分别为Pi+1(xPi+1,yPi+1,zPi+1)、Qi+1(xQi+1,yQi+1,zQi+1)、Mi+1(xMi+1,yMi+1,zMi+1);经计算可得:
故有:
采样时间设置为0.2483s;第i个激光跟踪仪输出的测量数据如表1。
表1第i个激光跟踪仪输出的测量数据(长度单位为米,时间单位为秒)
表1续表
第i+1个激光跟踪仪输出的测量数据如表2。
表2第i+1个激光跟踪仪输出的测量数据(长度单位为米,时间单位为秒)
表2续表
第i个激光跟踪仪输出数据按式(1)进行坐标变换后的数据如表3。
表3 第i个激光跟踪仪输出数据坐标变换结果(长度单位为米,时间单位为秒)
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0