







专利摘要
本发明涉及图像处理技术领域,提供一种交通标识牌跟踪识别方法及系统,所述方法包括下述步骤:选取用于对交通标识牌图像进行分割的彩色空间通道;构建结合多层注意力检测机理模型的层叠检测系统,对标识牌图像进行交通标识牌初步检测,获取交通标识牌的分类特征信息;对视频序列中跟踪到的交通标识牌进行纵向处理;构建神经网络分类器,并利用构建的神经网络分类器对交通标识牌的分类特征信息进行标识牌检测识别,实现对标识牌图像的识别,而且其识别的效率和准确度较高,满足智能交通系统的要求。
权利要求
1.一种交通标识牌跟踪识别方法,其特征在于,所述方法包括下述步骤:
选取用于对交通标识牌图像进行分割的彩色空间通道;
构建结合多层注意力检测机理模型的层叠检测系统,对标识牌图像进行交通标识牌初步检测,获取交通标识牌的分类特征信息;
对视频序列中跟踪到的交通标识牌进行纵向处理;
构建神经网络分类器,并利用构建的神经网络分类器对所述交通标识牌的分类特征信息进行标识牌检测识别。
2.根据权利要求1所述的交通标识牌跟踪识别方法,其特征在于,所述选取用于对交通标识牌图像进行分割的彩色空间通道的步骤具体包括下述步骤:
根据交通标识牌所具备的特征,拍摄不同天气和不同光照环境下的标识牌图像,并建立标识牌图像数据库;
采用若干个彩色空间对所述标识牌图像数据库中的标识牌图像进行训练,并在多维度空间内进行聚类分析,获取彩色空间通道进行选择。
3.根据权利要求1所述的交通标识牌跟踪识别方法,其特征在于,所述构建结合多层注意力检测机理模型的层叠检测系统,对标识牌图像进行交通标识牌初步检测,获取交通标识牌的分类特征信息的步骤具体包括下述步骤:
对标识牌图像进行解析,获取标识牌图像的概念特征集合,所述概念特征集合包括形状特征、颜色特征、梯度特征以及位置特征;
对标识牌图像的概念特征集合进行有效特征的选择,获取交通标识牌的分类特征信息。
4.根据权利要求1所述的交通标识牌跟踪识别方法,其特征在于,所述对视频序列中跟踪到的交通标识牌进行纵向处理的步骤具体包括下述步骤:
建立交通标识牌的训练图像集,基于PCA核函数建立图像投影空间;
建立MAP估计数学模型;
根据所述图像投影空间和MAP估计数学模型,生成基于核函数PCA的MAP重建数学模型;
在视频序列中选择其中一幅初始图像进行空间投影,作为初始的先验图像信息;
基于初始的先验图像信息对连续视频帧中的图像进行纵向模糊处理,获取高分辨率的图像。
5.根据权利要求1所述的交通标识牌跟踪识别方法,其特征在于,所述构建神经网络分类器的步骤具体包括下述步骤:
获取交通标识牌样本图像和非交通标识牌样本图像,建立训练样本图库;
使用Haar小波特征、MB-LBP特征和SURF特征对所述训练样本图库中的图像进行特征选择;
将选择到的特征输入到三层感知器神经网络进行交通标识牌的综合训练,获得所述神经网络分类器;
所述神经网络分类器输入的是选择的特征,输出的是交通标识牌的分类结果信息。
6.一种交通标识牌跟踪识别系统,其特征在于,所述系统包括:
彩色空间通道选取模块,用于选取用于对交通标识牌图像进行分割的彩色空间通道;
分类特征信息获取模块,用于构建结合多层注意力检测机理模型的层叠检测系统,对标识牌图像进行交通标识牌初步检测,获取交通标识牌的分类特征信息;
纵向处理模块,用于对视频序列中跟踪到的交通标识牌进行纵向处理;
神经网络分类器构建模块,用于构建神经网络分类器;
标识牌识别模块,用于利用构建的神经网络分类器对所述交通标识牌的分类特征信息进行标识牌检测识别。
7.根据权利要求6所述的交通标识牌跟踪识别系统,其特征在于,所述彩色空间通道选取模块具体包括:
数据库建立模块,用于根据交通标识牌所具备的特征,拍摄不同天气和不同光照环境下的标识牌图像,并建立标识牌图像数据库;
训练模块,用于采用若干个彩色空间对所述标识牌图像数据库中的标识牌图像进行训练,并在多维度空间内进行聚类分析,获取彩色空间通道进行选择。
8.根据权利要求6所述的交通标识牌跟踪识别系统,其特征在于,所述分类特征信息获取模块具体包括:
概念特征获取模块,用于对标识牌图像进行解析,获取标识牌图像的概念特征集合,所述概念特征集合包括形状特征、颜色特征、梯度特征以及位置特征;
分类特征获取模块,用于对标识牌图像的概念特征集合进行有效特征的选择,获取交通标识牌的分类特征信息。
9.根据权利要求6所述的交通标识牌跟踪识别系统,其特征在于,所述纵向处理模块具体包括:
图像投影空间建立模块,用于建立交通标识牌的训练图像集,基于PCA核函数建立图像投影空间;
MAP模型建立模块,用于建立MAP估计数学模型;
重建数学模型生成模块,用于根据所述图像投影空间和MAP估计数学模型,生成基于核函数PCA的MAP重建数学模型;
先验图像信息生成模块,用于在视频序列中选择其中一幅初始图像进行空间投影,作为初始的先验图像信息;
高分辨率图像获取模块,用于基于初始的先验图像信息对连续视频帧中的图像进行纵向模糊处理,获取高分辨率的图像。
10.根据权利要求6所述的交通标识牌跟踪识别系统,其特征在于,所述神经网络分类器构建模块具体包括:
训练样本图库建立模块,用于获取交通标识牌样本图像和非交通标识牌样本图像,建立训练样本图库;
特征选择模块,用于使用Haar小波特征、MB-LBP特征和SURF特征对所述训练样本图库中的图像进行特征选择;
综合训练模块,用于将选择到的特征输入到三层感知器神经网络进行交通标识牌的综合训练,获得所述神经网络分类器;
所述神经网络分类器输入的是选择的特征,输出的是交通标识牌的分类结果信息。
说明书
技术领域
本发明属于图像处理技术领域,尤其涉及一种交通标识牌跟踪识别方法及系统。
背景技术
随着经济社会的发展和城市化进程的加快,我国汽车数量显著增加,根据公安部门的统计数据,截止2013年底,我国机动车保有量就达到了2.5亿辆。汽车在给人们出行带来方便的同时,也给城市交通带来明显的压力,致使交通拥挤加剧、交通事故频发和空气污染加剧,特别是公路交通的安全以及运输效率问题变得日益突出,因此各个国家开始从修建更多的道路、扩展路网规模逐步转移到采用高新技术改造现有的道路交通系统和管理体系上。从二十世纪八十年代起,美国、日本以及西欧等发达国家为解决共同面临的交通问题,投入大量的人力和物力,开展了智能交通系统(Intelligent Transportation System,ITS)的研究。在智能交通系统研究中,基于图像处理技术的车载视觉系统是的一个重要的分支领域,特别是道路交通标志,由于其含有道路交通指示的关键信息,已成为智能交通研究的重要对象。
道路交通标志识别(Traffic Sign Recognition,简称TSR)是对场景中的道路交通标志进行检测和分类识别,以获得交通指示信息的过程,是ITS研究领域中尚未解决的难题之一,也是实景图形识别问题研究的热点,对其进行深入研究将具有重要的理论意义和应用价值。
发明内容
本发明的目的在于提供一种可有效对视频序列中的交通标识牌进行识别且识别速度较快的交通标识牌跟踪识别方法。
本发明是这样实现的,一种交通标识牌跟踪识别方法,所述方法包括下述步骤:
选取用于对交通标识牌图像进行分割的彩色空间通道;
构建结合多层注意力检测机理模型的层叠检测系统,对标识牌图像进行交通标识牌初步检测,获取交通标识牌的分类特征信息;
对视频序列中跟踪到的交通标识牌进行纵向处理;
构建神经网络分类器,并利用构建的神经网络分类器对所述交通标识牌的分类特征信息进行标识牌检测识别。
作为一种改进的方案,所述选取用于对交通标识牌图像进行分割的彩色空间通道的步骤具体包括下述步骤:
根据交通标识牌所具备的特征,拍摄不同天气和不同光照环境下的标识牌图像,并建立标识牌图像数据库;
采用若干个彩色空间对所述标识牌图像数据库中的标识牌图像进行训练,并在多维度空间内进行聚类分析,对彩色空间通道进行选择。
作为一种改进的方案,所述构建结合多层注意力检测机理模型的层叠检测系统,对标识牌图像进行交通标识牌初步检测,获取交通标识牌的分类特征信息的步骤具体包括下述步骤:
对标识牌图像进行解析,获取标识牌图像的概念特征集合,所述概念特征集合包括形状特征、颜色特征、梯度特征以及位置特征;
对标识牌图像的概念特征集合进行有效特征的选择,获取交通标识牌的分类特征信息。
作为一种改进的方案,所述对视频序列中跟踪到的交通标识牌进行纵向处理的步骤具体包括下述步骤:
建立交通标识牌的训练图像集,基于PCA核函数建立图像投影空间;
建立MAP估计数学模型;
根据所述图像投影空间和MAP估计数学模型,生成基于核函数PCA的MAP重建数学模型;
在视频序列中选择其中一幅初始图像进行空间投影,作为初始的先验图像信息;
基于初始的先验图像信息对连续视频帧中的图像进行纵向模糊处理,获取高分辨率的图像。
作为一种改进的方案,所述构建神经网络分类器的步骤具体包括下述步骤:
获取交通标识牌样本图像和非交通标识牌样本图像,建立训练样本图库;
使用Haar小波特征、MB-LBP特征和SURF特征对所述训练样本图库中的图像进行特征选择;
将选择到的特征输入到三层感知器神经网络进行交通标识牌的综合训练,获得所述神经网络分类器;
所述神经网络分类器输入的是选择的特征,输出的是交通标识牌的分类结果信息。
本发明的另一目的在于提供一种交通标识牌跟踪识别系统,所述系统包括:
彩色空间通道选取模块,用于选取用于对交通标识牌图像进行分割的彩色空间通道;
分类特征信息获取模块,用于构建结合多层注意力检测机理模型的层叠检测系统,对标识牌图像进行交通标识牌初步检测,获取交通标识牌的分类特征信息;
纵向处理模块,用于对视频序列中跟踪到的交通标识牌进行纵向处理;
神经网络分类器构建模块,用于构建神经网络分类器;
标识牌识别模块,用于利用构建的神经网络分类器对所述交通标识牌的分类特征信息进行标识牌检测识别。
作为一种改进的方案,所述彩色空间通道选取模块具体包括:
数据库建立模块,用于根据交通标识牌所具备的特征,拍摄不同天气和不同光照环境下的标识牌图像,并建立标识牌图像数据库;
训练模块,用于采用若干个彩色空间对所述标识牌图像数据库中的标识牌图像进行训练,并在多维度空间内进行聚类分析,对彩色空间通道进行选择。
作为一种改进的方案,所述分类特征信息获取模块具体包括:
概念特征获取模块,用于对标识牌图像进行解析,获取标识牌图像的概念特征集合,所述概念特征集合包括形状特征、颜色特征、梯度特征以及位置特征;
分类特征获取模块,用于对标识牌图像的概念特征集合进行有效特征的选择,获取交通标识牌的分类特征信息。
作为一种改进的方案,所述纵向处理模块具体包括:
图像投影空间建立模块,用于建立交通标识牌的训练图像集,基于PCA核函数建立图像投影空间;
MAP模型建立模块,用于建立MAP估计数学模型;
重建数学模型生成模块,用于根据所述图像投影空间和MAP估计数学模型,生成基于核函数PCA的MAP重建数学模型;
先验图像信息生成模块,用于在视频序列中选择其中一幅初始图像进行空间投影,作为初始的先验图像信息;
高分辨率图像获取模块,用于基于初始的先验图像信息对连续视频帧中的图像进行纵向模糊处理,获取高分辨率的图像。
作为一种改进的方案,所述神经网络分类器构建模块具体包括:
训练样本图库建立模块,用于获取交通标识牌样本图像和非交通标识牌样本图像,建立训练样本图库;
特征选择模块,用于使用Haar小波特征、MB-LBP特征和SURF特征对所述训练样本图库中的图像进行特征选择;
综合训练模块,用于将选择到的特征输入到三层感知器神经网络进行交通标识牌的综合训练,获得所述神经网络分类器;
所述神经网络分类器输入的是选择的特征,输出的是交通标识牌的分类结果信息。
在本发明实施例中,选取用于对交通标识牌图像进行分割的彩色空间通道;构建结合多层注意力检测机理模型的层叠检测系统,对标识牌图像进行交通标识牌初步检测,获取交通标识牌的分类特征信息;对视频序列中跟踪到的交通标识牌进行纵向处理;构建神经网络分类器,并利用构建的神经网络分类器对交通标识牌的分类特征信息进行标识牌检测识别,实现对标识牌图像的识别,而且其识别的效率和准确度较高,满足智能交通系统的要求。
附图说明
图1是本发明提供的交通标识牌跟踪识别方法的实现流程图;
图2是本发明提供的选取用于对交通标识牌图像进行分割的彩色空间通道的实现流程图;
图3是本发明提供的构建结合多层注意力检测机理模型的层叠检测系统,对标识牌图像进行交通标识牌初步检测,获取交通标识牌的分类特征信息的实现流程图;
图4是本发明提供的对视频序列中跟踪到的交通标识牌进行纵向处理的实现流程图;
图5是本发明提供的构建神经网络分类器的实现流程图;
图6是本发明提供的注意力吸引机制和层叠系统的人类视觉注意力训练模型的示意图;
图7是本发明提供的神经网络分类器的生成示意图;
图8是本发明提供的交通标识牌跟踪识别系统的结构框图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
图1示出了本发明提供的交通标识牌跟踪识别方法的实现流程图,其具体包括下述步骤:
在步骤S101中,选取用于对交通标识牌图像进行分割的彩色空间通道。
其中,交通标识牌检测和识别面对的是大场景,对算法的实时性提出了较高的要求,在传统的检测和识别系统中,利用标识牌特有的固定颜色进行非目标区域排除,往往是进行检测和识别的第一步,也大大提高了系统的运动速度,但是由于不同拍摄环境和不同光照等因素的影响,导致传统的彩色空间通道的标识牌的分割方法普遍具有鲁棒性不高的特点,因此,对交通标识牌图像进行分割的彩色空间通道进行选择,选取利于标识牌分割的彩色空间通道,下述有详细的步骤说明,在此不再赘述。
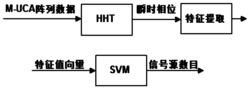
在步骤S102中,构建结合多层注意力检测机理模型的层叠检测系统,对标识牌图像进行交通标识牌初步检测,获取交通标识牌的分类特征信息。
在该步骤中,在人类注意力认知机制和层叠系统的基础上,构建实时性、鲁棒性高的标识牌检测系统,并以检测到的标识牌颜色信息在视频序列中进行连续跟踪。
人类注意力的吸引机制分为刺激引发和概念引发,本方案中采用概念引发的方式,将标识牌的一些特有的特征作为概念输入概念引发的模型中进行训练,最终得到只对标识牌敏感的调整集合。
在步骤S103中,对视频序列中跟踪到的交通标识牌进行纵向处理。
在该步骤中,跟踪过程中由于行车速度较快、距离较远和道路颠簸等原因导致跟踪视频模糊,针对视频拍摄模糊及低分辨率的图像进行分析,先初步实现模糊及低分辨率的交通标识牌复原,以达到由低质量的跟踪视频序列重建出高质量图片的目标。
在步骤S104中,构建神经网络分类器,并利用构建的神经网络分类器对所述交通标识牌的分类特征信息进行标识牌检测识别。
在该步骤中,该神经网络分类器输入的是选择的特征,输出的是交通标识牌的分类结果信息,从而实现对交通标识牌的识别。
针对标识牌所特有的特征,从多种不同特征中提取有效特征和多特征融合识别的方法,对不同环境和不同时间下拍摄的标识牌进行汇总建立图库,用多特征融合的方法对图库进行训练,得到具有高识别率和低误检率的神经网络分类器。
在本发明实施例中,如图2所示,选取用于对交通标识牌图像进行分割的彩色空间通道的步骤具体包括下述步骤:
在步骤S201中,根据交通标识牌所具备的特征,拍摄不同天气和不同光照环境下的标识牌图像,并建立标识牌图像数据库。
在步骤S202中,采用若干个彩色空间对所述标识牌图像数据库中的标识牌图像进行训练,并在多维度空间内进行聚类分析,对彩色空间通道进行选择。
在该实施例中,对标识牌图像的训练采用HSV、RGB、YCbCr等多个彩色空间,将选择的彩色通道用于大背景下非交通标识牌的快速排除,并将选择的彩色通道用于人类认知模型和“层叠系统”的检测和跟踪方法中,改善标准彩色空间鲁棒性不高的缺点。
在本发明实施例中,如图3所示,构建结合多层注意力检测机理模型的层叠检测系统,对标识牌图像进行交通标识牌初步检测,获取交通标识牌的分类特征信息的步骤具体包括下述步骤:
在步骤S301中,对标识牌图像进行解析,获取标识牌图像的概念特征集合,所述概念特征集合包括形状特征、颜色特征、梯度特征以及位置特征。
在该步骤中,交通标识牌的概念输入包括四个方面:
①形状概念,即三角形、方形和圆形等形状信息;②是颜色概念,即交通标识牌固定的红色、蓝色和黄色等颜色信息;③梯度概念,即灰度空间中八个不同方向的梯度信息;④位置概念,即标识牌在视野中经常出现的位置信息。
在步骤S302中,对标识牌图像的概念特征集合进行有效特征的选择,获取交通标识牌的分类特征信息。
在该步骤中,如果特征集的数目较多则会影响实际识别系统的实时性,需要采用有效的机制从得到的特征集中提取最有效的特征,即采用Boosting算法进行训练的层叠系统,在系统的每一层进行最优化特征选择,最终得到最有效特征,其中基于注意力吸引机制和层叠系统的人类视觉注意力训练模型如图6所示。
在该实施例中,为有效的跟踪已检测到的标识牌,采用卡尔曼滤波和Camshift算法进行实时跟踪,由于行车的轨迹一般比较确定,运用卡尔曼滤波能有效预测跟踪位置,而Camshift算法能够有效的跟踪标识牌特有的彩色特征,并且跟踪速度也满足实时性的要求。
在本发明实施例中,如图4所示,对视频序列中跟踪到的交通标识牌进行纵向处理的步骤具体包括下述步骤:
在步骤S401中,建立交通标识牌的训练图像集,基于PCA核函数建立图像投影空间。
在该步骤中,在视频序列的跟踪过程中,由于车速过快、距离较远和道路颠簸的原因导致跟踪视频模糊,其具体先对视频拍摄模糊及分辨率较低的图像进行交通标识牌复原,以达到又低质量总跟视频序列重建出高质量图片的目标。
在步骤S402中,建立MAP估计数学模型。
其中,应用贝叶斯理论最大后验概率可以得到由低分辨率图像Y估计高分辨率图像X的数学模型,即:
在步骤S403中,根据所述图像投影空间和MAP估计数学模型,生成基于核函数PCA的MAP重建数学模型。
在该步骤中,将图像投影空间和MAP估计数学模型结合起来,得到该基于核函数PCA的MAP重建数学模型,即:
其中, 都是在投影空间计算过程中得到的数据参数。
在步骤S404中,在视频序列中选择其中一幅初始图像进行空间投影,作为初始的先验图像信息。
在步骤S405中,基于初始的先验图像信息对连续视频帧中的图像进行纵向模糊处理,获取高分辨率的图像。
在该实施例中,将低分辨率的图像转换为高分辨率的图像,为后续交通标识牌的识别提供便利。
如图5所示,构建神经网络分类器的步骤具体包括下述步骤:
在步骤S501中,获取交通标识牌样本图像和非交通标识牌样本图像,建立训练样本图库。
在步骤S502中,使用Haar小波特征、MB-LBP特征和SURF特征对所述训练样本图库中的图像进行特征选择。
在步骤S503中,将选择到的特征输入到三层感知器神经网络进行交通标识牌的综合训练,获得所述神经网络分类器。
其中,神经网络分类器输入的是选择的特征,输出的是交通标识牌的分类结果信息。
在该实施例中,结合图7所示,该三层感知器神经网络具有三个分类层级,经过三个层级的分类获取清晰图像。雾霾清晰化复原图像往往存在不同程度的模糊、轮晕效应等,影响到传统标识牌识别方法的识别率,使用像素值或单纯一种特征作为识别手段难以满足标识牌识别精度和速度的要求,并且由于行车过程中标识牌识别存在一些应用难点,例如存在拍摄角度变化对算法实时性要求较高和存在一定行车模糊等,这些都对传统的识别方法提出挑战,该实施例从不同的特征的优缺点出发,给出一种能够应用与雾霾行车环境相匹配的识别方法,即图5所示的方法。
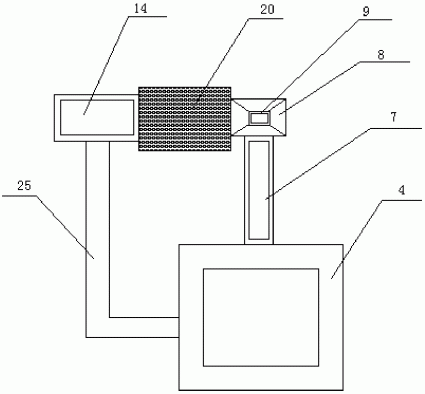
图8示出了本发明提供的交通标识牌跟踪识别系统的结构框图,为了便于说明,图中仅给出了与本发明实施例相关的部分。
该交通标识牌跟踪识别系统具体包括:
彩色空间通道选取模块11,用于选取用于对交通标识牌图像进行分割的彩色空间通道;
分类特征信息获取模块12,用于构建结合多层注意力检测机理模型的层叠检测系统,对标识牌图像进行交通标识牌初步检测,获取交通标识牌的分类特征信息;
纵向处理模块13,用于对视频序列中跟踪到的交通标识牌进行纵向处理;
神经网络分类器构建模块14,用于构建神经网络分类器;
标识牌识别模块15,用于利用构建的神经网络分类器对所述交通标识牌的分类特征信息进行标识牌检测识别。
其中,上述彩色空间通道选取模块11具体包括:
数据库建立模块16,用于根据交通标识牌所具备的特征,拍摄不同天气和不同光照环境下的标识牌图像,并建立标识牌图像数据库;
训练模块17,用于采用若干个彩色空间对所述标识牌图像数据库中的标识牌图像进行训练,并在多维度空间内进行聚类分析,对彩色空间通道进行选择。
在该实施例中,分类特征信息获取模块12具体包括:
概念特征获取模块18,用于对标识牌图像进行解析,获取标识牌图像的概念特征集合,所述概念特征集合包括形状特征、颜色特征、梯度特征以及位置特征;
分类特征获取模块19,用于对标识牌图像的概念特征集合进行有效特征的选择,获取交通标识牌的分类特征信息。
在本发明实施例中,该纵向处理模块13具体包括:
图像投影空间建立模块20,用于建立交通标识牌的训练图像集,基于PCA核函数建立图像投影空间;
MAP模型建立模块21,用于建立MAP估计数学模型;
重建数学模型生成模块22,用于根据所述图像投影空间和MAP估计数学模型,生成基于核函数PCA的MAP重建数学模型;
先验图像信息生成模块23,用于在视频序列中选择其中一幅初始图像进行空间投影,作为初始的先验图像信息;
高分辨率图像获取模块24,用于基于初始的先验图像信息对连续视频帧中的图像进行纵向模糊处理,获取高分辨率的图像。
在本发明实施例中,上述神经网络分类器构建模块14具体包括:
训练样本图库建立模块25,用于获取交通标识牌样本图像和非交通标识牌样本图像,建立训练样本图库;
特征选择模块26,用于使用Haar小波特征、MB-LBP特征和SURF特征对所述训练样本图库中的图像进行特征选择;
综合训练模块27,用于将选择到的特征输入到三层感知器神经网络进行交通标识牌的综合训练,获得所述神经网络分类器;
其中,上述神经网络分类器输入的是选择的特征,输出的是交通标识牌的分类结果信息。
在该实施例中,上述各个模块的功能如上述方法实施例所记载,在此不再赘述,但不用限制本发明。
在本发明实施例中,选取用于对交通标识牌图像进行分割的彩色空间通道;构建结合多层注意力检测机理模型的层叠检测系统,对标识牌图像进行交通标识牌初步检测,获取交通标识牌的分类特征信息;对视频序列中跟踪到的交通标识牌进行纵向处理;构建神经网络分类器,并利用构建的神经网络分类器对交通标识牌的分类特征信息进行标识牌检测识别,实现对标识牌图像的识别,而且其识别的效率和准确度较高,满足智能交通系统的要求。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
一种交通标识牌跟踪识别方法及系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0