






专利摘要
本发明涉及一种改良型粒子群寻优神经网络超声波电机控制系统及其方法,该控制系统中:超声波电机一侧输出轴与光电编码器连接,另一侧输出轴与飞轮惯性负载连接,飞轮惯性负载的输出轴经联轴器与力矩传感器连接,光电编码器、力矩传感器的信号输出端分别接至控制系统。该控制方法由基于广义回归神经网络的辨识器和电机组成,辨识器完成对超声波电机在不同控制变量、飞轮惯性负载下输入输出特性的辨识,控制器根据辨识结果实现对超声波电机的速度/位置控制输出,以确定不同负载、不同控制变量下的控制特性。本发明所提出的改良型粒子群寻优神经网络超声波电机控制系统及其方法不仅控制准确度高,而且结构简单、紧凑,使用效果好。
权利要求
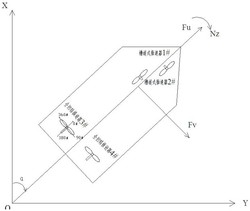
1.一种改良型粒子群寻优神经网络超声波电机控制系统,包括:以及一基座以及设置于该基座上的超声波电机,其特征在于,所述超声波电机一侧输出轴与一光电编码器相连接,所述超声波电机另一侧输出轴与一飞轮惯性负载一端相连接;所述飞轮惯性负载的输出轴经一弹性联轴器与一力矩传感器相连接;所述光电编码器的信号输出端以及所述力矩传感器的信号输出端均连接至一控制系统;所述超声波电机、所述光电编码器以及所述力矩传感器分别对应经超声波电机固定支架、光电编码器固定支架以及力矩传感器固定支架固定于所述基座上。
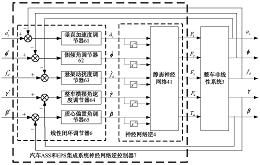
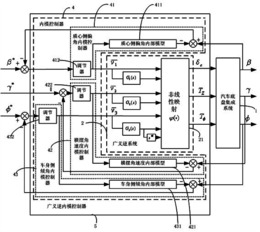
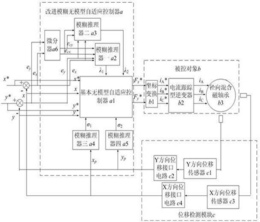
2.根据权利要求1所述的改良型粒子群寻优神经网络超声波电机控制系统,其特征在于,所述控制系统包括一超声波电机驱动控制电路;所述超声波电机驱动控制电路包括一控制芯片电路以及一驱动芯片电路;所述光电编码器的信号输出端与所述控制芯片电路的输入端相连接;所述控制芯片电路的输出端与所述驱动芯片电路的输入端相连接,以驱动所述驱动芯片电路;所述驱动芯片电路的驱动频率调节信号输出端以及驱动半桥电路调节信号输出端分别对应与所述超声波电机输入端相连接;所述驱动芯片电路产生驱动频率调节信号以及驱动半桥电路调节信号,对输出至所述超声波电机A、B两相PWM的频率、相位及通断进行控制。
3.一种根据权利要求2所述的改良型粒子群寻优神经网络超声波电机控制系统的控制方法,其特征在于,所述控制系统中的控制芯片电路通过递归式函数连结模糊类神经网络对所述超声波电机在不同控制变量以及不同飞轮惯性负载下的输入输出特性进行控制,并通过改良型粒子群寻优法在线调整所述递归式函数连结模糊类神经网络的学习速率,以增加所述递归式函数连结模糊类神经网络的学习能力以及加快所述递归式函数连结模糊类神经网络的收敛速度。
4.根据权利要求3所述的改良型粒子群寻优神经网络超声波电机控制方法,其特征在于,所述递归式函数连结模糊类神经网络为一个五层的模糊类神经网络,包括动态回授以及函数连结类神经网络;每一层网络的讯号传递过程如下:
第一层:
在第一层中,神经元的输出表示如下:
其中: 和 为第一层中的第i个神经元的输入和输出,且 和 分别为追随误差e及其微分
第二层:
采用高斯函数作为归属函数:
其中:mij和σij分别为高斯函数的平均值和标准偏差,第二层中每个神经元均为一个归属函数;m为常数,且m为第二层神经元的个数;
第三层:
在第三层中,添加动态回授,采用Sigmoid函数作为递归部分中内部变数hk的激发函数,动态回授的输出如下:
式中:
为存储元件的递归变数;θjk为动态回授的连结权重;
在第三层中,神经元代表模糊逻辑规则的前置部,且神经元在第三层以Π来表示;将所述第二层神经元的输出与所述动态回授的输出相乘,对第j个神经元而言,第三层的输出表示如下:
第四层:
第四中的神经元将函数连结类神经网络的输出 与第三层的输出 作相乘,每个神经元表示如下:
其中, 为第四层的输出;
第五层:
在第五层中的神经元进行解模糊化,输出的数学关系表示为:
其中, 为递归式函数连结模糊类神经网络的输出。
5.根据权利要求4所述的改良型粒子群寻优神经网络超声波电机控制方法,其特征在于,所述递归式函数连结模糊类神经网络的在线参数学习算法采用梯度陡降法的倒传递算法;将能量误差函数V记为:
其中,dm为速度或位置控制的目标函数,d为速度或位置控制的实际测量值;
通过如下过程完成以动态倒传递算法为基础的学习算法:
第五层:
倒传回来的误差如下:
第四层:
倒传回来的误差如下:
第三层:
函数连结类神经网络的连结权重值每次更新迭代及调整公式如下:
wMj(N+1)=wMj(N)+ΔwMj
其中,ηw为函数连结类神经网络的连结权重值的学习速率;
在递归部分,倒传回来的误差如下所示:
连结权重值每次更新迭代及调整公式如下:
θjk(N+1)=θjk(N)+Δθjk
其中,ηθ为连结权重值的学习速率;
第二层:
在第二层中,所有连结权重值均为1,以减少网络运算量;倒传回来的误差计算如下
高斯函数的平均值以及标准偏差值每次更新迭代及调整公式如下:
mij(N+1)=mij(N)+Δmij
σij(N+1)=σij(N)+Δσij
其中,ηm是平均值的学习速率,ησ是标准偏差值的学习速率。
6.根据权利要求5所述的改良型粒子群寻优神经网络超声波电机控制方法,其特征在于,采用误差适应法则取代灵敏度如下:
其中, 为追随误差e的导数。
7.根据权利要求5所述的改良型粒子群寻优神经网络超声波电机控制方法,其特征在于,在所述递归式函数连结模糊类神经网络的倒传递算法中,采用所述改良型粒子群寻优法在线调整所述函数连结类神经网络的连结权重值的学习速率ηw、所述连结权重值的学习速率ηθ、所述平均值的学习速率ηm以及所述标准偏差值的学习速率ησ。
8.根据权利要求7所述的改良型粒子群寻优神经网络超声波电机控制方法,其特征在于,所述通过改良型粒子群寻优法在线调整所述递归式函数连结模糊类神经网络的学习速率按照如下步骤实现:
步骤S11:对族群里的粒子数P以及搜寻空间的维度d进行设置;
步骤S12:生成每个粒子的位置矢量 以及速度矢量
步骤S13:获取每个粒子的位置初始值范围以及速度初始值范围;所述位置初始值范围: 所述速度初始值范围: 其中,其中粒子位置:
步骤S14:计算适应函数值;将改良型粒子群寻优法族群中每个粒子的目前位置输入递归式函数连结模糊类神经网络的模型中,计算每个粒子目前位置的适应函数值,以判断粒子对应位置的好坏以及对应的学习速率,并将所述适应函数值最大值对应的目前位置最为最佳位置;
步骤S15:每个粒子均对其最佳位置及该最佳位置对应的适应函数值进行记忆;将每个粒子到过的最佳位置记为 将族群里所有粒子中所到过的最佳位置记为Gbestd;在第一次迭代时,将每个粒子对应的 和Gbestd作为初始位置;每一次迭代计算时,计算族群里每个粒子现在位置的适应函数值,若粒子现在位置的适应函数值大于或等于前一次迭代计算中 的适应函数值,则更新 更新 后,在族群中所有 里选择适应函数值最高对应的位置,若该位置的适应函数值大于或等于第一次迭代计算中Gbestd的适应函数值,则更新Gbestd;
步骤S16:对每个粒子的粒子位置以及粒子速度进行更新,并对粒子速度进行限定:若
步骤S17:判断迭代次数是否达到最大值,若达到最大值,则结束计算,并向所述递归式函数连结模糊类神经网络输出Gbestd;否则,返回所述步骤S14。
9.根据权利要求4所述的改良型粒子群寻优神经网络超声波电机控制方法,其特征在于,在所述步骤S16中,粒子速度更新按照如下方式完成:
粒子位置更新按照如下方式完成:
其中, 为第i个粒子的目前速度,i=1,...,P,P为族群中粒子个数,d为搜寻空间为d维空间, 为第i个粒子到过的最佳位置,Gbestd为族群里所有粒子所到过的最佳位置, 为第i个粒子的目前位置;rand()为在0和1之间的随机常数, 为第i个粒子到过的最差位置,为粒子最差解;c1、c2以及c3分别为粒子个体最佳位置、粒子个体最差位置以及族群最佳位置的加速因子;w为惯性权重,Nmax为网络迭代的最大值;Nn为目前的迭代值,w的值限制在[wmax,wmin]之间,为了避免发散,w的值必须小于1。
10.根据权利要求4所述的改良型粒子群寻优神经网络超声波电机控制方法,其特征在于,在所述步骤S14中,所述适应函数为:
其中: 和d*分别为改良型粒子群寻优法代入的所述递归式函数连结模糊类神经网络中的位置命令和动子位置, 为所述递归式函数连结模糊类神经网络中模拟的追随误差。
说明书
技术领域
本发明涉及电机控制器领域,特别是一种改良型粒子群寻优神经网络超声波电机控制系统及其方法。
背景技术
现有的超声波电机神经网络控制系统中网络学习速率的选取,一般是采用尝试错误法。过大的学习速率,会造成网络发散;过小的学习速率,则会造成追随误差收敛太慢,而追随误差较大,但尝试错误法十分耗时。为了节省寻找网络学习速率的时间,以及增加网络在线学习的能力,在递归式函数连结模糊类神经网络的倒传递算法中,使用改良型粒子群寻优法来在线调整网络学习速率,使得神经网络的学习速率加快,同时利用神经网络可以对电机的非线性可以进行预测和补偿,因此电机的位置与速度控制可以获得较好的动态特性。
发明内容
本发明的目的在于提供一种改良型粒子群寻优神经网络超声波电机控制系统及其方法,以克服现有技术中存在缺陷。
为实现上述目的,本发明的技术方案是:一种改良型粒子群寻优神经网络超声波电机控制系统,包括:以及一基座以及设置于该基座上的超声波电机,所述超声波电机一侧输出轴与一光电编码器相连接,所述超声波电机另一侧输出轴与一飞轮惯性负载一端相连接;所述飞轮惯性负载的输出轴经一弹性联轴器与一力矩传感器相连接;所述光电编码器的信号输出端以及所述力矩传感器的信号输出端均连接至一控制系统;所述超声波电机、所述光电编码器以及所述力矩传感器分别对应经超声波电机固定支架、光电编码器固定支架以及力矩传感器固定支架固定于所述基座上。
在本发明一实施例中,所述控制系统包括一超声波电机驱动控制电路;所述超声波电机驱动控制电路包括一控制芯片电路以及一驱动芯片电路;所述光电编码器的信号输出端与所述控制芯片电路的输入端相连接;所述控制芯片电路的输出端与所述驱动芯片电路的输入端相连接,以驱动所述驱动芯片电路;所述驱动芯片电路的驱动频率调节信号输出端以及驱动半桥电路调节信号输出端分别对应与所述超声波电机输入端相连接;所述驱动芯片电路产生驱动频率调节信号以及驱动半桥电路调节信号,对输出至所述超声波电机A、B两相PWM的频率、相位及通断进行控制。
进一步的,还提供一种改良型粒子群寻优神经网络超声波电机控制系统的控制方法,所述控制系统中的控制芯片电路通过递归式函数连结模糊类神经网络对所述超声波电机在不同控制变量以及不同飞轮惯性负载下的输入输出特性进行控制,并通过改良型粒子群寻优法在线调整所述递归式函数连结模糊类神经网络的学习速率,以增加所述递归式函数连结模糊类神经网络的学习能力以及加快所述递归式函数连结模糊类神经网络的收敛速度。
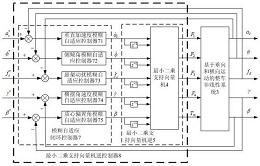
在本发明一实施例中,所述递归式函数连结模糊类神经网络为一个五层的模糊类神经网络,包括动态回授以及函数连结类神经网络;每一层网络的讯号传递过程如下:
第一层:
在第一层中,神经元的输出表示如下:
其中: 和 为第一层中的第i个神经元的输入和输出,且 和 分别为追随误差e及其微分
第二层:
采用高斯函数作为归属函数:
其中:mij和σij分别为高斯函数的平均值和标准偏差,第二层中每个神经元均为一个归属函数;m为常数,且m为第二层神经元的个数;
第三层:
在第三层中,添加动态回授,采用Sigmoid函数作为递归部分中内部变数hk的激发函数,动态回授的输出如下:
式中:
为存储元件的递归变数;θjk为动态回授的连结权重;
在第三层中,神经元代表模糊逻辑规则的前置部,且神经元在第三层以Π来表示;将所述第二层神经元的输出与所述动态回授的输出相乘,对第j个神经元而言,第三层的输出表示如下:
第四层:
第四中的神经元将函数连结类神经网络的输出 与第三层的输出 作相乘,每个神经元表示如下:
其中, 为第四层的输出;
第五层:
在第五层中的神经元进行解模糊化,输出的数学关系表示为:
其中, 为递归式函数连结模糊类神经网络的输出。
在本发明一实施例中,所述递归式函数连结模糊类神经网络的在线参数学习算法采用梯度陡降法的倒传递算法;将能量误差函数V记为:
其中,dm为速度或位置控制的目标函数,d为速度或位置控制的实际测量值;
通过如下过程完成以动态倒传递算法为基础的学习算法:
第五层:
倒传回来的误差如下:
第四层:
倒传回来的误差如下:
第三层:
函数连结类神经网络的连结权重值每次更新迭代及调整公式如下:
wMj(N+1)=wMj(N)+ΔwMj
其中,ηw为函数连结类神经网络的连结权重值的学习速率;
在递归部分,倒传回来的误差如下所示:
连结权重值每次更新迭代及调整公式如下:
θjk(N+1)=θjk(N)+Δθjk
其中,ηθ为连结权重值的学习速率;
第二层:
在第二层中,所有连结权重值均为1,以减少网络运算量;倒传回来的误差计算如下
改良型粒子群寻优神经网络超声波电机控制系统及其方法专利购买费用说明
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
![]()







动态评分
0.0