








专利摘要
本发明涉及一种能够无线传输的具有石榴果肉分离功能的智能机器人,包括主体、中控机构、进料口、出料口、剥石榴机构、分离机构和放置机构,剥石榴机构包括竖向切割组件和水平切割组件,竖向切割组件包括第一驱动单元和切割单元,水平切割组件包括控制单元和移动单元,分离机构机构包括震动组件和筛选组件。该能够无线传输的具有石榴果肉分离功能的智能机器人中,通过剥石榴机构,可以很好的对石榴进行切割,为石榴粒分离做准备,通过分离机构,可以将石榴的果肉和果皮进行分离,通过放置机构,可以对机器人进行轻松地拆装,通过这些大大提高了剥石榴的效率,食用起来更加的方便,也提高了机器人的可靠性和实用性。
权利要求
1.一种能够无线传输的具有石榴果肉分离功能的智能机器人,其特征在于,包括主体(1)、中控机构(2)、进料口(4)、出料口(3)、剥石榴机构、分离机构和放置机构(5),所述进料口(4)设置在主体(1)的上方,所述出料口(3)设置在主体(1)的一侧,所述剥石榴机构和分离机构均设置在主体(1)的内部,所述放置机构(5)设置在主体(1)的下方,所述中控机构(2)设置在主体(1)上,所述剥石榴机构和分离机构均与中控机构(2)电连接;
所述剥石榴机构包括竖向切割组件和水平切割组件,所述水平切割组件设置在竖向切割组件的一侧;
所述竖向切割组件包括第一驱动单元和切割单元,所述第一驱动单元与切割单元传动连接,所述第一驱动单元包括第一电机(11)、第一驱动轴(12)和两个移动块(13),所述第一电机(11)设置在主体(1)的内部,所述第一驱动轴(12)水平设置,所述第一驱动轴(12)上设有两段外螺纹,两段外螺纹关于第一驱动轴(12)的竖向中心轴线对称,两个移动块(13)均套设在第一驱动轴(12)上且分别位于两段外螺纹上,所述移动块(13)的内部设有开孔,所述开孔内部设有与对应的外螺纹匹配的内螺纹,所述第一电机(11)通过第一驱动轴(12)与移动块(13)传动连接;
所述切割单元包括两个夹紧单元,两个夹紧单元关于第一驱动轴(12)的竖向轴线对称,所述夹紧单元包括连接杆(16)、固定块(17)和滑动单元(18),所述滑动单元(18)和连接杆(16)均竖向设置,所述滑动单元(18)与固定块(17)相连,所述固定块(17)通过连接杆(16)与移动块(13)一一对应连接;
所述水平切割组件包括控制单元和移动单元,所述控制单元包括第四电机(27)、第四驱动轴和圆柱齿轮(28),所述第四电机(27)设置在主体(1)内部,所述第四驱动轴竖向设置,所述第四电机(27)通过第四驱动轴与圆柱齿轮(28)传动连接;
所述移动组件包括移动杆(29),固定杆(31)、两根连杆(32)和两个第二刀片(33),所述移动杆(29)水平设置,所述移动杆(29)的一侧设有若干与圆柱齿轮(28)啮合的从动齿,所述固定杆(31)竖向设置,所述移动杆(29)的一端与固定杆(31)的一侧连接,两根连杆(32)关于固定板的水平中心轴线对称,两个刀片关于固定板的水平中心轴线对称,所述连杆(32)与第二刀片(33)一一对应连接,所述固定杆(31)的两端分别通过连杆(32)与对应的第二刀片(33)连接;
所述分离机构机构包括震动组件和筛选组件,所述震动组件与筛选组件传动连接,所述震动组件包括磁铁(34)和两块电磁铁(35),所述磁铁(34)水平设置,所述磁铁(34)的中部铰接于主体(1)的内部,两块电磁铁(35)均水平设置且分别设置在磁铁(34)的上下两侧,两块电磁铁(35)关于磁铁(34)的水平中心轴线对称;
所述筛选组件包括连接块(36)、收集框(37)和两个筛选层(38),两个筛选层(38)分别水平上下设置在收集框(37)的内部,所述连接块(36)与收集框(37)相连,所述磁铁(34)通过连接块(36)与收集框(37)传动连接。
2.如权利要求1所述的能够无线传输的具有石榴果肉分离功能的智能机器人,其特征在于,所述放置机构(5)包括底座(7)、定位块(6)和紧固组件,所述定位块(6)设置在主体(1)的下方,所述紧固组件设置在定位块(6)的下方,所述底座(7)上设有凹槽,所述定位块(6)与凹槽匹配,所述紧固组件包括两个伸缩单元,两个伸缩单元关于定位块(6)的竖向中心轴线对称,所述伸缩单元包括套筒(10)、弹簧(8)和卡块(9),所述弹簧(8)的一端与套筒(10)内壁的底端相连,所述弹簧(8)的另一端与卡块(9)相连,所述卡块(9)与凹槽内壁的卡槽匹配。
3.如权利要求1所述的能够无线传输的具有石榴果肉分离功能的智能机器人,其特征在于,所述滑动单元(18)包括夹紧架(21)、第一刀片(26)、第二驱动单元、传动带(24)和从动轮(25),所述夹紧架(21)为弧形,所述夹紧架(21)的弧形的圆心靠近另一个夹紧架(21),所述夹紧架(21)的内侧设有导轨,所述第一刀片(26)在导轨上滑动,所述第二驱动单元包括第二电机(22)、第二驱动轴和驱动轮(23),所述第二电机(22)设置在夹紧架(21)的内部,所述第二电机(22)通过第二驱动轴与驱动轮(23)传动连接,所述驱动轮(23)设置在夹紧架(21)的内部的下方,所述从动轮(25)设置在夹紧架(21)的内部的上方,所述传动带(24)沿着导轨分布,所述驱动轮(23)通过传动带(24)与从动轮(25)传动连接,所述第一刀片(26)与传动带(24)连接。
4.如权利要求1所述的能够无线传输的具有石榴果肉分离功能的智能机器人,其特征在于,所述主体(1)内部还设有转动单元,所述转动单元设置在滑动单元(18)的下方且位于两个夹紧单元的中间,所述转动单元包括第三电机(19)、第三驱动轴和托板(20),所述第三电机(19)设置在主体(1)的内部,所述第三驱动轴竖向设置,所述托板(20)水平设置,所述第三电机(19)通过第三驱动轴与托板(20)传动连接。
5.如权利要求1所述的能够无线传输的具有石榴果肉分离功能的智能机器人,其特征在于,所述移动块(13)的两侧设有两根导向杆(15),两根导向杆(15)关于移动块(13)的水平中心轴线对称,所述导向杆(15)水平设置在主体(1)的内部,所述移动块(13)与导向杆(15)滑动连接。
6.如权利要求1所述的能够无线传输的具有石榴果肉分离功能的智能机器人,其特征在于,所述移动杆(29)的两侧设有若干滑轮(30),所述滑轮(30)固定在主体(1)的内部且与移动杆(29)两侧的凹槽匹配。
7.如权利要求1所述的能够无线传输的具有石榴果肉分离功能的智能机器人,其特征在于,设置在收集框(37)上半部分的筛选层(38)内部设置的开孔的直径大于设置在收集框(37)下半部分的筛选层(38)内部设置的开孔的直径。
8.如权利要求1所述的能够无线传输的具有石榴果肉分离功能的智能机器人,其特征在于,所述第一驱动轴(12)的中心设有限位块(14)。
9.如权利要求1所述的能够无线传输的具有石榴果肉分离功能的智能机器人,其特征在于,所述中控机构(2)包括显示界面(39)、控制按键(40)、状态指示灯(41)和PLC,所述显示界面(39)、控制按键(40)和状态指示灯(41)均与PLC电连接。
10.如权利要求9所述的能够无线传输的具有石榴果肉分离功能的智能机器人,其特征在于,所述主体(1)的内部设有天线,所述天线与PLC电连接。
说明书
技术领域
本发明涉及机器人领域,特别涉及一种能够无线传输的具有石榴果肉分离功能的智能机器人。
背景技术
石榴为石榴科植物石榴的果实,产我国大部地区,以个大、色红黄、味甜酸者为佳。石榴的果实、果皮、根及花均可作药。药用果实多用味酸者,有涩肠止血之功。果皮含鞣质、生物碱及熊果酸等,有明显的收敛和抑菌作用,为强力的治痢疾药。根皮含石榴皮碱,为驱虫要药,用于治疗肾结石、糖尿病、乳糜尿也有效。花可止血及赤白带下,还用以泡水洗眼,有明目效能。虽然石榴有这么多的功效,但是吃石榴却是一个问题,人们在吃石榴时往往都是通过手剥,这样效率十分低下,而且剥起来十分的费力,这样导致吃石榴的兴致大大降低,因此急需一种帮助人剥石榴的机器人来解决这个难题,不仅可以分离果肉,还可以对果肉、果皮进行分离筛选。
发明内容
本发明要解决的技术问题是:为了克服现有技术的不足,提供一种能够无线传输的具有石榴果肉分离功能的智能机器人。
本发明解决其技术问题所采用的技术方案是:一种能够无线传输的具有石榴果肉分离功能的智能机器人,包括主体、中控机构、进料口、出料口、剥石榴机构、分离机构和放置机构,所述进料口设置在主体的上方,所述出料口设置在主体的一侧,所述剥石榴机构和分离机构均设置在主体的内部,所述放置机构设置在主体的下方,所述中控机构设置在主体上,所述剥石榴机构和分离机构均与中控机构电连接;
所述剥石榴机构包括竖向切割组件和水平切割组件,所述水平切割组件设置在竖向切割组件的一侧;
所述竖向切割组件包括第一驱动单元和切割单元,所述第一驱动单元与切割单元传动连接,所述第一驱动单元包括第一电机、第一驱动轴和两个移动块,所述第一电机设置在主体的内部,所述第一驱动轴水平设置,所述第一驱动轴上设有两段外螺纹,两段外螺纹关于第一驱动轴的竖向中心轴线对称,两个移动块均套设在第一驱动轴上且分别位于两段外螺纹上,所述移动块的内部设有开孔,所述开孔内部设有与对应的外螺纹匹配的内螺纹,所述第一电机通过第一驱动轴与移动块传动连接;
所述切割单元包括两个夹紧单元,两个夹紧单元关于第一驱动轴的竖向轴线对称,所述夹紧单元包括连接杆、固定块和滑动单元,所述滑动单元和连接杆均竖向设置,所述滑动单元与固定块相连,所述固定块通过连接杆与移动块一一对应连接;
所述水平切割组件包括控制单元和移动单元,所述控制单元包括第四电机、第四驱动轴和圆柱齿轮,所述第四电机设置在主体内部,所述第四驱动轴竖向设置,所述第四电机通过第四驱动轴与圆柱齿轮传动连接;
所述移动组件包括移动杆,固定杆、两根连杆和两个第二刀片,所述移动杆水平设置,所述移动杆的一侧设有若干与圆柱齿轮啮合的从动齿,所述固定杆竖向设置,所述移动杆的一端与固定杆的一侧连接,两根连杆关于固定板的水平中心轴线对称,两个刀片关于固定板的水平中心轴线对称,所述连杆与第二刀片一一对应连接,所述固定杆的两端分别通过连杆与对应的第二刀片连接;
当需要对石榴进行切割时,此时第一电机启动,第一驱动轴随之转动,因为第一驱动轴上设有两段外螺纹,两段外螺纹关于第一驱动轴的竖向中心轴线对称,两个移动块均套设在第一驱动轴上且分别位于两段外螺纹上,移动块的内部设有开孔,开孔内部设有与对应的外螺纹匹配的内螺纹,故移动块开始移动,又因为固定块通过连接杆与移动块一一对应连接,滑动单元与固定块相连,故第一电机正转时,两个移动块相互靠近,带动两个滑动单元相互靠近并对石榴进行夹紧,石榴的底部与托板接触,因为第一刀片设置在传动带上,传动带沿着导轨设置,此时第二电机启动,,驱动轮随之转动,驱动轮通过传动带带动从动轮转动,传动带带着第一刀片沿导轨移动,对石榴侧面进行切割,当切割完后,第一电机反转,移动块带着滑动单元分开,此时第三电机启动,托板随之转动,带动放置在上面的石榴进行转动,当转到合适位置时停止转动,等待再次被切割,接着重复上面动作,直到侧面需要被切割的地方都被切割完后结束,最后,第四电机启动,圆柱齿轮随之转动,因为移动杆的一侧设有若干与圆柱齿轮啮合的从动齿,故移动板向左移动,又因为连杆与第二刀片一一对应连接,固定杆的两端分别通过连杆与对应的第二刀片连接,移动杆的一端与固定杆的一侧连接,故移动杆带着第二刀片向左移动,对石榴的上下两端进行切割,这样就完成了石榴的切割。这种切割的石榴的方法是根据生活中剥石榴的小技巧改变而来的,可以很好的为后续的果皮分离做准备,并且不会对石榴造成破坏,影响口感。
所述分离机构机构包括震动组件和筛选组件,所述震动组件与筛选组件传动连接,所述震动组件包括磁铁和两块电磁铁,所述磁铁水平设置,所述磁铁的中部铰接于主体的内部,两块电磁铁均水平设置且分别设置在磁铁的上下两侧,两块电磁铁关于磁铁的水平中心轴线对称;
所述筛选组件包括连接块、收集框和两个筛选层,两个筛选层分别水平上下设置在收集框的内部,所述连接块与收集框相连,所述磁铁通过连接块与收集框传动连接。
当需要对石榴果皮分离时,此时切割好的石榴掉落到收集框内部的筛选层上,此时对电磁铁进行通电,电磁铁随之产生磁性,因为磁铁水平设置,磁铁的中部铰接于主体的内部,两块电磁铁均水平设置且分别设置在磁铁的上下两侧,故当两侧的电磁铁进行间断通电时,磁铁会被吸引,进行不同的摆动,又因为磁铁通过连接块与收集框传动连接,故收集框会不停的震动,在筛选层上面的石榴因为震动,会进行脱离,石榴颗粒较小掉入到收集框的底部,石榴皮较大则留在筛选层上,这样很好的实现了果皮分离,节约了人力劳动,更加的便捷。
作为优选,当需要放置机器人时,此时,将定位块对准底座上设有凹槽,定位块与凹槽匹配,故定位块能够放入凹槽中,又因为,紧固组件设置在定位块的下方,在定位块下移的过程中,卡块受到作用力,沿着弹簧收缩的方向缩进套筒内,当紧固组件下移到卡槽的位置时,弹簧伸长,带动卡块与卡槽匹配,更好的紧固机器人。所述放置机构包括底座、定位块和紧固组件,所述定位块设置在主体的下方,所述紧固组件设置在定位块的下方,所述底座上设有凹槽,所述定位块与凹槽匹配,所述紧固组件包括两个伸缩单元,两个伸缩单元关于定位块的竖向中心轴线对称,所述伸缩单元包括套筒、弹簧和卡块,所述弹簧的一端与套筒内壁的底端相连,所述弹簧的另一端与卡块相连,所述卡块与凹槽内壁的卡槽匹配。
作为优选,为了使第一刀片对石榴的侧面进行切割,因为第一刀片设置在传动带上,传动带沿着导轨设置,故当第二电机启动时,驱动轮随之转动,驱动轮通过传动带带动从动轮转动,传动带带着第一刀片沿导轨移动,对石榴进行切割。所述滑动单元包括夹紧架、第一刀片、第二驱动单元、传动带和从动轮,所述夹紧架为弧形,所述夹紧架的弧形的圆心靠近另一个夹紧架,所述夹紧架的内侧设有导轨,所述第一刀片在导轨上滑动,所述第二驱动单元包括第二电机、第二驱动轴和驱动轮,所述第二电机设置在夹紧架的内部,所述第二电机通过第二驱动轴与驱动轮传动连接,所述驱动轮设置在夹紧架的内部的下方,所述从动轮设置在夹紧架的内部的上方,所述传动带沿着导轨分布,所述驱动轮通过传动带与从动轮传动连接,所述第一刀片与传动带连接。
作为优选,为了对石榴不同的侧面进行切割,将石榴放置在托板上,托板的面积比较小,当滑动单元切割过一次后,此时,第三电机启动,托板随之转动,带动放置在上面的石榴进行转动,当转到合适位置时停止转动,等待再次被切割。所述主体内部还设有转动单元,所述转动单元设置在滑动单元的下方且位于两个夹紧单元的中间,所述转动单元包括第三电机、第三驱动轴和托板,所述第三电机设置在主体的内部,所述第三驱动轴竖向设置,所述托板水平设置,所述第三电机通过第三驱动轴与托板传动连接。
作为优选,为了使移动块水平移动,所述移动块的两侧设有两根导向杆,两根导向杆关于移动块的水平中心轴线对称,所述导向杆水平设置在主体的内部,所述移动块与导向杆滑动连接。
作为优选,为了使移动杆水平移动的更加平稳,所述移动杆的两侧设有若干滑轮,所述滑轮固定在主体的内部且与移动杆两侧的凹槽匹配。
作为优选,为了对石榴皮和石榴粒进行分离,在震动的过程中,石榴皮留在了上层,石榴粒掉落到下面的收集框内。设置在收集框上半部分的筛选层内部设置的开孔的直径大于设置在收集框下半部分的筛选层内部设置的开孔的直径。
作为优选,为了防止两个移动块相撞,所述第一驱动轴的中心设有限位块。
作为优选,所述中控机构包括显示界面、控制按键、状态指示灯和PLC,所述显示界面、控制按键和状态指示灯均与PLC电连接。
作为优选,为了能够远程遥控机器人,所述主体的内部设有天线,所述天线与PLC电连接。
本发明的有益效果是,该能够无线传输的具有石榴果肉分离功能的智能机器人中,通过剥石榴机构,可以很好的对石榴进行切割,为石榴粒分离做准备,通过分离机构,可以将石榴的果肉进行分离,通过放置机构,可以对机器人进行轻松地拆装,通过这些大大提高了剥石榴的效率,食用起来更加的方便,也提高了机器人的可靠性和实用性。
附图说明
下面结合附图和实施例对本发明进一步说明。
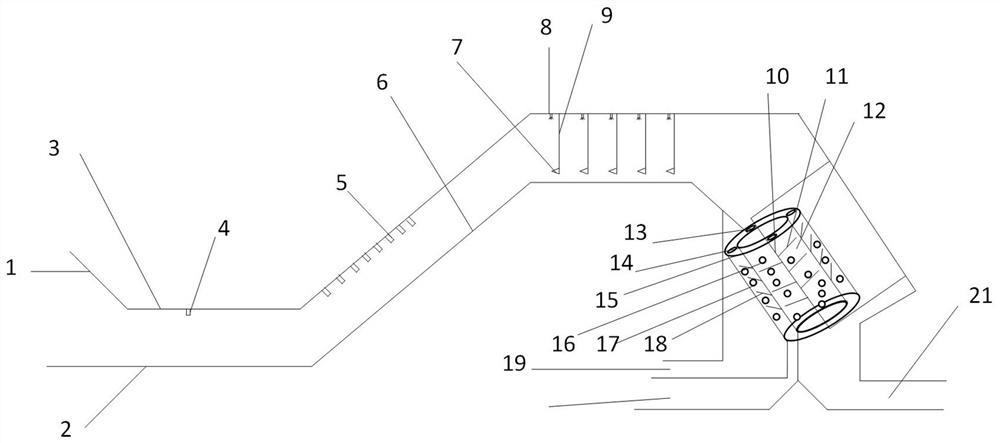
图1是本发明的能够无线传输的具有石榴果肉分离功能的智能机器人的结构示意图;
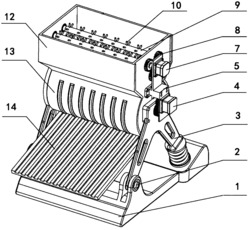
图2是本发明的能够无线传输的具有石榴果肉分离功能的智能机器人的放置机构的结构示意图;
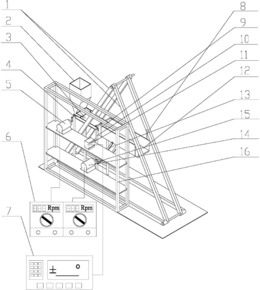
图3是本发明的能够无线传输的具有石榴果肉分离功能的智能机器人的竖向切割组件的结构示意图;
图4是本发明的能够无线传输的具有石榴果肉分离功能的智能机器人的滑动单元的结构示意图;
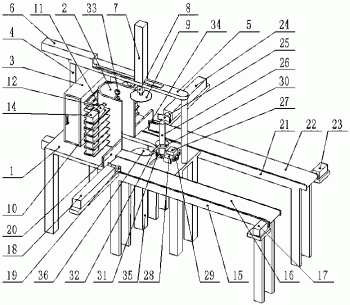
图5是本发明的能够无线传输的具有石榴果肉分离功能的智能机器人的水平切割组件的结构示意图;
图6是本发明的能够无线传输的具有石榴果肉分离功能的智能机器人的分离机构的结构示意图;
图7是本发明的能够无线传输的具有石榴果肉分离功能的智能机器人的中控机构的结构示意图;
图中:1.主体,2.中控机构,3.出料口,4.进料口,5.放置机构,6.定位块,7.底座,8.弹簧,9.卡块,10.套筒,11.第一电机,12.第一驱动轴,13.移动块,14.限位块,15.导向杆,16.连接杆,17.固定块,18.滑动单元,19.第三电机,20.托板,21.夹紧架,22.第二电机,23.驱动轮,24.传动带,25.从动轮,26.第一刀片,27.第四电机,28.圆柱齿轮,29.移动杆,30.滑轮,31.固定杆,32.连杆,33.第二刀片,34.磁铁,35.电磁铁,36.连接块,37.收集框,38.筛选层,39.显示界面,40.控制按键,41.状态指示灯。
具体实施方式
现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
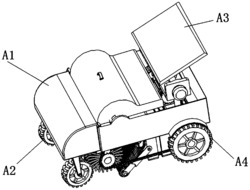
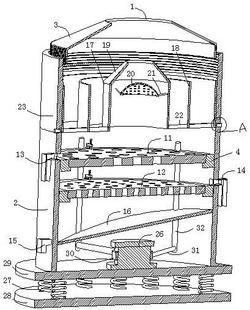
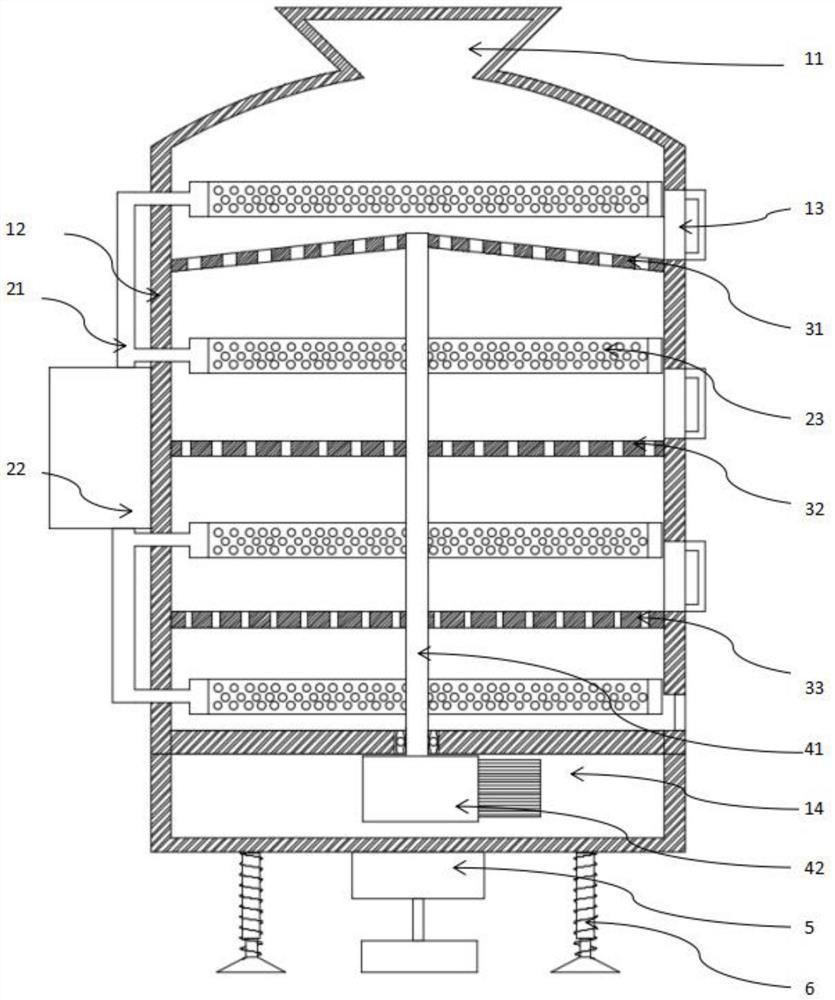
如图1-图7所示,一种能够无线传输的具有石榴果肉分离功能的智能机器人,包括主体1、中控机构2、进料口4、出料口3、剥石榴机构、分离机构和放置机构5,所述进料口4设置在主体1的上方,所述出料口3设置在主体1的一侧,所述剥石榴机构和分离机构均设置在主体1的内部,所述放置机构5设置在主体1的下方,所述中控机构2设置在主体1上,所述剥石榴机构和分离机构均与中控机构2电连接;
所述剥石榴机构包括竖向切割组件和水平切割组件,所述水平切割组件设置在竖向切割组件的一侧;
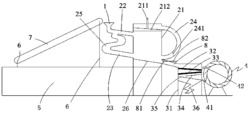
所述竖向切割组件包括第一驱动单元和切割单元,所述第一驱动单元与切割单元传动连接,所述第一驱动单元包括第一电机11、第一驱动轴12和两个移动块13,所述第一电机11设置在主体1的内部,所述第一驱动轴12水平设置,所述第一驱动轴12上设有两段外螺纹,两段外螺纹关于第一驱动轴12的竖向中心轴线对称,两个移动块13均套设在第一驱动轴12上且分别位于两段外螺纹上,所述移动块13的内部设有开孔,所述开孔内部设有与对应的外螺纹匹配的内螺纹,所述第一电机11通过第一驱动轴12与移动块13传动连接;
所述切割单元包括两个夹紧单元,两个夹紧单元关于第一驱动轴12的竖向轴线对称,所述夹紧单元包括连接杆16、固定块17和滑动单元18,所述滑动单元18和连接杆16均竖向设置,所述滑动单元18与固定块17相连,所述固定块17通过连接杆16与移动块13一一对应连接;
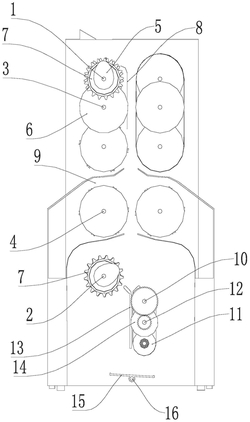
所述水平切割组件包括控制单元和移动单元,所述控制单元包括第四电机27、第四驱动轴和圆柱齿轮28,所述第四电机27设置在主体1内部,所述第四驱动轴竖向设置,所述第四电机27通过第四驱动轴与圆柱齿轮28传动连接;
所述移动组件包括移动杆29,固定杆31、两根连杆32和两个第二刀片33,所述移动杆29水平设置,所述移动杆29的一侧设有若干与圆柱齿轮28啮合的从动齿,所述固定杆31竖向设置,所述移动杆29的一端与固定杆31的一侧连接,两根连杆32关于固定板的水平中心轴线对称,两个刀片关于固定板的水平中心轴线对称,所述连杆32与第二刀片33一一对应连接,所述固定杆31的两端分别通过连杆32与对应的第二刀片33连接;
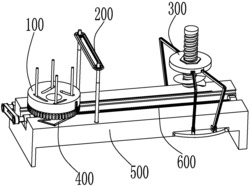
当需要对石榴进行切割时,此时第一电机11启动,第一驱动轴12随之转动,因为第一驱动轴12上设有两段外螺纹,两段外螺纹关于第一驱动轴12的竖向中心轴线对称,两个移动块13均套设在第一驱动轴12上且分别位于两段外螺纹上,移动块13的内部设有开孔,开孔内部设有与对应的外螺纹匹配的内螺纹,故移动块13开始移动,又因为固定块17通过连接杆16与移动块13一一对应连接,滑动单元18与固定块17相连,故第一电机11正转时,两个移动块13相互靠近,带动两个滑动单元18相互靠近并对石榴进行夹紧,石榴的底部与托板20接触,因为第一刀片26设置在传动带24上,传动带24沿着导轨设置,此时第二电机22启动,,驱动轮23随之转动,驱动轮23通过传动带24带动从动轮25转动,传动带24带着第一刀片26沿导轨移动,对石榴侧面进行切割,当切割完后,第一电机11反转,移动块13带着滑动单元18分开,此时第三电机19启动,托板20随之转动,带动放置在上面的石榴进行转动,当转到合适位置时停止转动,等待再次被切割,接着重复上面动作,直到侧面需要被切割的地方都被切割完后结束,最后,第四电机27启动,圆柱齿轮28随之转动,因为移动杆29的一侧设有若干与圆柱齿轮28啮合的从动齿,故移动板29向左移动,又因为连杆32与第二刀片33一一对应连接,固定杆31的两端分别通过连杆32与对应的第二刀片33连接,移动杆29的一端与固定杆31的一侧连接,故移动杆29带着第二刀片33向左移动,对石榴的上下两端进行切割,这样就完成了石榴的切割。这种切割的石榴的方法是根据生活中剥石榴的小技巧改变而来的,可以很好的为后续的果皮分离做准备,并且不会对石榴造成破坏,影响口感。
所述分离机构机构包括震动组件和筛选组件,所述震动组件与筛选组件传动连接,所述震动组件包括磁铁34和两块电磁铁35,所述磁铁34水平设置,所述磁铁34的中部铰接于主体1的内部,两块电磁铁35均水平设置且分别设置在磁铁34的上下两侧,两块电磁铁35关于磁铁34的水平中心轴线对称;
所述筛选组件包括连接块36、收集框37和两个筛选层38,两个筛选层38分别水平上下设置在收集框37的内部,所述连接块36与收集框37相连,所述磁铁34通过连接块36与收集框37传动连接。
当需要对石榴果皮分离时,此时切割好的石榴掉落到收集框37内部的筛选层38上,此时对电磁铁35进行通电,电磁铁35随之产生磁性,因为磁铁34水平设置,磁铁34的中部铰接于主体1的内部,两块电磁铁35均水平设置且分别设置在磁铁34的上下两侧,故当两侧的电磁铁35进行间断通电时,磁铁34会被吸引,进行不同的摆动,又因为磁铁34通过连接块36与收集框37传动连接,故收集框37会不停的震动,在筛选层38上面的石榴因为震动,会进行脱离,石榴颗粒较小掉入到收集框的底部,石榴皮较大则留在筛选层38上,这样很好的实现了果皮分离,节约了人力劳动,更加的便捷。
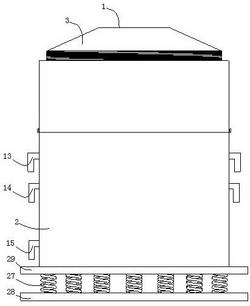
作为优选,当需要放置机器人时,此时,将定位块6对准底座7上设有凹槽,定位块6与凹槽匹配,故定位块6能够放入凹槽中,又因为,紧固组件设置在定位块6的下方,在定位块6下移的过程中,卡块9受到作用力,沿着弹簧8收缩的方向缩进套筒10内,当紧固组件下移到卡槽的位置时,弹簧8伸长,带动卡块9与卡槽匹配,更好的紧固机器人。所述放置机构5包括底座7、定位块6和紧固组件,所述定位块6设置在主体1的下方,所述紧固组件设置在定位块6的下方,所述底座7上设有凹槽,所述定位块6与凹槽匹配,所述紧固组件包括两个伸缩单元,两个伸缩单元关于定位块6的竖向中心轴线对称,所述伸缩单元包括套筒10、弹簧8和卡块9,所述弹簧8的一端与套筒10内壁的底端相连,所述弹簧8的另一端与卡块9相连,所述卡块9与凹槽内壁的卡槽匹配。
作为优选,为了使第一刀片26对石榴的侧面进行切割,因为第一刀片26设置在传动带24上,传动带24沿着导轨设置,故当第二电机22启动时,驱动轮23随之转动,驱动轮23通过传动带24带动从动轮25转动,传动带24带着第一刀片26沿导轨移动,对石榴进行切割。所述滑动单元18包括夹紧架21、第一刀片26、第二驱动单元、传动带24和从动轮25,所述夹紧架21为弧形,所述夹紧架21的弧形的圆心靠近另一个夹紧架21,所述夹紧架21的内侧设有导轨,所述第一刀片26在导轨上滑动,所述第二驱动单元包括第二电机22、第二驱动轴和驱动轮23,所述第二电机22设置在夹紧架21的内部,所述第二电机22通过第二驱动轴与驱动轮23传动连接,所述驱动轮23设置在夹紧架21的内部的下方,所述从动轮25设置在夹紧架21的内部的上方,所述传动带24沿着导轨分布,所述驱动轮23通过传动带24与从动轮25传动连接,所述第一刀片26与传动带24连接。
作为优选,为了对石榴不同的侧面进行切割,将石榴放置在托板20上,托板20的面积比较小,当滑动单元18切割过一次后,此时,第三电机启动,托板20随之转动,带动放置在上面的石榴进行转动,当转到合适位置时停止转动,等待再次被切割。所述主体1内部还设有转动单元,所述转动单元设置在滑动单元18的下方且位于两个夹紧单元的中间,所述转动单元包括第三电机19、第三驱动轴和托板20,所述第三电机19设置在主体1的内部,所述第三驱动轴竖向设置,所述托板20水平设置,所述第三电机19通过第三驱动轴与托板20传动连接。
作为优选,为了使移动块13水平移动,所述移动块13的两侧设有两根导向杆15,两根导向杆15关于移动块13的水平中心轴线对称,所述导向杆15水平设置在主体1的内部,所述移动块13与导向杆15滑动连接。
作为优选,为了使移动杆29水平移动的更加平稳,所述移动杆29的两侧设有若干滑轮30,所述滑轮30固定在主体1的内部且与移动杆29两侧的凹槽匹配。
作为优选,为了对石榴皮和石榴粒进行分离,在震动的过程中,石榴皮留在了上层,石榴粒掉落到下面的收集框37内。设置在收集框37上半部分的筛选层38内部设置的开孔的直径大于设置在收集框37下半部分的筛选层38内部设置的开孔的直径。
作为优选,为了防止两个移动块13相撞,所述第一驱动轴12的中心设有限位块14。
作为优选,所述中控机构2包括显示界面39、控制按键40、状态指示灯41和PLC,所述显示界面39、控制按键40和状态指示灯41均与PLC电连接。
作为优选,为了能够远程遥控机器人,所述主体1的内部设有天线,所述天线与PLC电连接。
与现有技术相比,该能够无线传输的具有石榴果肉分离功能的智能机器人中,通过剥石榴机构,可以很好的对石榴进行切割,为石榴粒分离做准备,通过分离机构,可以将石榴的果肉进行分离,通过放置机构5,可以对机器人进行轻松地拆装,通过这些大大提高了剥石榴的效率,食用起来更加的方便,也提高了机器人的可靠性和实用性。
以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
一种能够无线传输的具有石榴果肉分离功能的智能机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0