








专利摘要
本发明公开了一种基于无人机的异常火点监测系统及监测方法,其中监测系统包括无人机,包括用于定位自身三维位置信息的卫星导航模块,用于采集地面图像的可见光采集系统与红外采集系统,用于判断异常火点区域在监测视角中相对视角中心位置的敏感探测器;应用终端,包括用于控制无人机飞行的控制装置,及用于显示监测区域的图像和无人机三维位置信息的图像显示模块。该监测系统结构简单,操作方便,成像质量高;其监测方法实现了异常火点监测简易化,简化了测量流程,降低了测量成本,效率较高,便于涉及到市、县、镇、乡等所在区域异常火点如对秸秆焚烧、森林大火的监测,大大拓展了应用范围。
权利要求
1.一种基于无人机的异常火点监测系统,其特征在于,包括:
无人机,所述无人机上设置有用于定位自身位置信息的卫星定位模块,用于采集地面图像的可见光采集系统与红外采集系统,以及用于判断异常火点区域在监测视角中相对视角中心位置的敏感探测器;
应用终端,包括用于控制无人机飞行的控制装置以及用于显示监测区域的图像和无人机三维位置信息的图像显示模块。
2.根据权利要求1所述的一种基于无人机的异常火点监测系统,其特征在于,所述卫星导航模块为GPS卫星导航模块、北斗卫星导航模块或伽利略卫星导航模块中任一一种。
3.根据权利要求1所述的一种基于无人机的异常火点监测系统,其特征在于,所述可见光采集系统与红外采集系统为共轴图像采集系统,所述共轴图像采集系统用于在同一张图像成像时同时拍摄红外图像和可见光图像。
4.根据权利要求1所述的一种基于无人机的异常火点监测系统,其特征在于,还包括设于无人机或者图像显示模块中的用于将可见光图像和红外图像进行拼接的图像处理模块。
5.根据权利要求1所述的一种基于无人机的异常火点监测系统,其特征在于,所述位置敏感探测器包括四个光电探测器,分别用于监测视角中心左方、右方、前方和后方四个象限位置区域。
6.根据权利要求5所述的一种基于无人机的异常火点监测系统,其特征在于,每个所述光电探测器前方设有可见光截止滤光片,用于将可见光过滤,红外光通过。
7.根据权利要求1-6任一所述的一种基于无人机的异常火点监测系统,其特征在于,所述无人机上还包括用于测量无人机相对地面高度的高度传感器。
8.一种基于无人机的异常火点监测方法,其特征在于,使用如权利要求1-7任一所述的一种基于无人机的异常火点监测系统,其测量方法包括以下步骤:
步骤一、预设无人机飞行路径,启动所述无人机,无人机根据预设导航路径飞行至导航起始位置;
步骤二、检测红外异常区,无人机沿着导航路径向前飞行时,启动所述无人机上的可见光采集系统与红外采集系统,采集异常火点红外异常区域信息,所述位置敏感探测器的各光电探测器采集红外异常区域在视角中心的相对位置信息;当可见光采集系统与红外采集系统并未采集到红外异常区域信息时,无人机按照预设飞行路径继续飞行,直到采集到红外异常区域为止;
步骤三、根据位置敏感探测器检测到的红外异常区域位置信息,自动规划无人机飞行路径,使无人机飞行至异常火点红外异常区域正上方;
步骤四、无人机对异常火点红外异常区域采集成像,调整无人机飞行姿态,使所述可见光采集系统与红外采集系统朝下正对红外异常区域,所述可见光采集系统与红外采集系统分别对红外异常区域进行拍照成像,将可见光图像与红外图像分别传输至应用终端,并在应用终端进行显示;
步骤五、无人机回到预设导航路径继续飞行,重复所述步骤二至步骤四,在飞行过程中根据位置敏感探测器检测红外异常区域的信息,不断调整无人机飞行路径和飞行姿态,并在异常火点红外异常区域上方启动所述可见光采集系统与红外采集系统拍照成像,分别将可见光图像与红外图像分别传输至应用终端,并在应用终端进行显示;
步骤六、无人机完成预设导航路径飞行后,无人机降落至起飞位置,系统完成待测区域的异常火点监测。
9.根据权利要求8所述的一种基于无人机的异常火点监测方法,其特征在于,所述无人机内还设有图像处理模块,所述步骤四中在进行可见光图像和红外图像成像后,所述图像处理模块将可见光图像和红外图像拼接后,再将拼接图像传输至应用终端。
10.根据权利要求8所述的一种基于无人机的异常火点监测方法,其特征在于,所述应用终端内设有图像处理模块,所述步骤四中在进行可见光图像和红外图像成像后,将可见光图像与红外图像分别传输至应用终端后,由所述应用终端内的图像处理模块进行图像拼接,并在应用终端上的图像显示模块上进行显示。
说明书
技术领域
本发明涉及一种无人机航测技术领域,特别涉及一种基于无人机的异常火点监测方法。
背景技术
当前,因农作物秸秆无序焚烧而引发的大气环境污染问题,已引起全社会及各级政府的高度关注。秸秆焚烧产生的大量气体及颗粒污染物会引起区域性空气污染,危害人类身体健康,严重时会降低空气能见度、引发交通事故。据统计,每年我国秸秆焚烧量约为140Tg(百万吨),全国生物质燃烧的CO排放量中约有一半来自秸秆焚烧。每年6-10月收获季,全国范围内都会出现秸秆露天焚烧现象,很大程度上加重了大气污染水平。为此,2008年国务院办公厅下发了《关于加快推进农作物秸秆综合利用的意见》,2009和2012年国家发改委和农业部等部委又联合发布了《关于印发编制秸秆综合利用规划指导意见的通知》、《"十二五"农作物秸秆综合利用实施方案》。此后,各级政府还出台了一系列秸秆禁烧政策。但近年来,农业生产中秸秆集中焚烧的现象屡禁不止,因秸秆露天焚烧致使大量颗粒物输出引起国内区域性大气污染事件不胜枚举,已成为公众密切关注的社会、环境问题。
当前对于异常火点监测主要利用卫星遥感技术进行监测,卫星遥感监测技术的主要优势在于:该技术在大面积长时间的焚烧现场监测中具有准确性、客观性及数据的可回溯性,并且能够为全面的宏观性的异常火点监测提供数据支持。然而,由于卫星运行轨迹所限,其遥感监测重复观测时间仅为1-2天/次,受到每天监测次数有限、较小焚烧点捕捉困难、云雾天气影响监测结果等客观因素制约,直接导致观测结果有以下不足:
1)没有自有关键技术的突破,目前使用的数据处理和分析方法只能对超过一定面积和持续一定时间的焚烧场景进行检测,测试数据受客观因素影响较多,特别是在多云及夜晚情况下无法取得较好的效果;
2)相关数据过于专业,测试数据需要经过大量处理后才能够进行焚烧点辨识,而且数据的直观性不强,监测分辨率具有局限性,无法直接用于常规的焚烧监测管理;
3)应用范围有限,卫星遥感观测和处理的数据资源,基于成本和技术,一般只能掌握在省级或国家的气象部门,而市、县、镇、乡等所在区域才是秸秆焚烧的集中地,这些部门很难第一时间利用卫星遥感进行针对性的监测和对秸秆焚烧集中地进行迅速的处理,因此卫星遥感技术监测秸秆焚烧的应用范围相当有限;
上述问题的存在,大大降低了秸秆监测技术实际应用的经济、社会与生态效益。因此本发明基于无人机开发结构简单、使用方便、监测效率高的能够对异常火点如秸秆焚烧的监测方法。
发明内容
本发明的目的在于克服现有技术中基于卫星遥感监测的重复观察周期长,使用成本高,相关技术复杂,监测效果受环境影响大、应用范围有限等问题,提供一种基于无人机的异常火点监测系统,同时还提供了一种基于无人机的异常火点监测方法,该监测系统结构简单,操作方便,降低了测量成本,其监测方法简化了测量流程,效率较高,大大方了实际工程人员的使用。
为了实现上述发明目的,本发明提供了以下技术方案:
一种基于无人机的异常火点监测系统,包括:
无人机,所述无人机上设置有用于定位自身位置信息的卫星定位模块,用于采集地面图像的可见光采集系统与红外采集系统,用于判断异常火点区域在监测视角中相对视角中心位置的敏感探测器。
应用终端,包括用于控制无人机飞行的控制装置以及用于显示监测区域的图像和无人机三维位置信息的图像显示模块。
本发明所述一种基于无人机的异常火点监测系统,其中无人机中卫星导航模块用于输入监测区域的导航路径信息并用于对无人机的飞行路径导航,红外采集系统与可见光采集系统用于采集监测区域的图像信息,其中红外采集系统用于监测区域中热源异常的红外图像信息,位置敏感探测器用于判断红外异常区域方向;无人机根据位置敏感探测器的检测结果调整无人机飞行姿态,可见光采集系统用于对红外异常区域所在的整体区域进行成像,使得可见光采集系统与红外采集系统正对红外异常区域,便于采集清晰的图像信息;应用终端的显示模块用于显示完整的可见光图像与红外图像,操作人员根据可见光图像与红外图像进行异常火点区域如秸秆焚烧区域的辨别,并利用控制装置控制无分机的飞行;该基于无人机的异常火点监测方式,避免了传统监测系统依赖于遥感监测卫星,避免了重复观察周期长、使用成本高、相关技术复杂、监测效果受环境影响大等弊端,利用无人机作为监测载体,利用可见光采集系统与红外采集系统收集监测区域的图像信息,利用位置敏感器件检测值控制无人机飞行姿态,实现红外异常区域的清晰图像采集,利用动态图像拼接技术实现监测区域图像完整显示;该监测系统结构简单,操作方便,简化了测量流程,通过位置敏感探测器能够准确判断异常火点的红外异常区域位置,能够降低了测量成本,效率较高,大大方便了实际工程人员的使用,也便于涉及到市、县、镇、乡等所在区域异常火点监测的实际应用。
优选地,所述可见光采集系统与红外采集系统为共轴图像采集系统,所述共轴图像采集系统用于在同一张图像成像时同时拍摄红外图像和可见光图像,成像方便简单。
优选地,还包括设于无人机或者图像显示模块中的用于将可见光图像和红外图像进行拼接的图像处理模块。
该图像处理模块可以利用动态图像拼接技术实现将分离可见光图像与红外图像分别拼接为一张完整图像,并在显示模块能够显示完整的可见光图像与红外图像,操作人员根据可见光图像与红外图像进行异常火点区域的辨别。当图像处理模块集成到应用终端中时,无人机将可见光采集系统与红外采集系统拍摄的照片传输至应用终端,在应用终端实现图像的动态拼接。
优选地,所述无人机上还包括用于测量其相对地面高度的高度传感器,用于相对地面高度的测量,用于显示秸秆焚烧红外区域图像时,显示拍摄高度的坐标信息。
优选的所述位置敏感探测器包括四个光电探测器,分别用于监测视角中心左方、右方、前方和后方四个象限位置区域。
该位置敏感探测器为四象限位置敏感探测器,即相对位置敏感探测器视角中心的左方、右方、前方和后方四个象限位置,采用了四个光电探测器分别进行检测红外异常区成像在视角的位置,当其成像位置不在光轴上,对该成像信号的幅度和位置进行判断,自动控制无人机做位置调整使得探测到的红外异常区成像信息调整到光轴中心位置,即使可见光采集系统与红外采集系统的成像视角正对红外异常区域。
优选地,每个所述光电探测器前方设有可见光截止滤光片,用于将可见光过滤,红外光通过,异常火点区域的拍摄效果更好。
本发还提供了一种基于无人机的异常火点监测方法,包括使用上述的一种基于无人机的异常火点监测系统,其测量方法包括以下步骤:
步骤一、预设无人机飞行路径,启动所述无人机,无人机根据预设导航路径飞行至导航起始位置;
步骤二、检测红外异常区,无人机沿着导航路径向前飞行时,启动所述无人机上的可见光采集系统与红外采集系统,采集异常火点红外异常区域信息,所述位置敏感探测器的各光电探测器采集红外异常区域在视角中心的相对位置信息;当可见光采集系统与红外采集系统并未采集到红外异常区域信息时,无人机按照预设飞行路径继续飞行,直到采集到红外异常区域为止;
步骤三、根据位置敏感探测器检测到的红外异常区域位置信息,自动规划无人机飞行路径,使无人机飞行至异常火点红外异常区域正上方;
步骤四、无人机对异常火点红外异常区域采集成像,调整无人机飞行姿态,使所述可见光采集系统与红外采集系统朝下正对红外异常区域,所述可见光采集系统与红外采集系统分别对红外异常区域进行拍照成像,将可见光图像与红外图像分别传输至应用终端,并在应用终端进行显示;
步骤五、无人机回到预设导航路径继续飞行,重复所述步骤二至步骤四,在飞行过程中根据位置敏感探测器检测红外异常区域的信息,不断调整无人机飞行路径和飞行姿态,并在异常火点红外异常区域上方启动所述可见光采集系统与红外采集系统拍照成像,分别将可见光图像与红外图像分别传输至应用终端,并在应用终端进行显示;
步骤六、无人机完成预设导航路径飞行后,无人机降落至起飞位置,系统完成待测区域的异常火点监测。
该基于无人机的异常火点监测系统的测量方法,采用了上述的监测系统,通过无人机与图像处理相结合的方式实现异常火点区域如秸秆焚烧的监测,在无人机上安装卫星导航模块,根据预设导航路径对待监测区域进行监测;在拍照之前,无人机根据位置敏感探测器判断异常火点区域位置,自动规划无人机飞行路径,无人机飞行至异常火点正上方,再启动红外采集系统与可见光采集系统,用于采集监测区域中热源异常的红外图像信息和红外异常区域周边整体成像,其中位置敏感探测器用于判断红外异常区域方向,并根据位置敏感探测器的检测结果随时调整无人机飞行姿态,方便采集较为清晰的图像信息,该拍照时根据设定时间间隔进行拍照,能够降低图像信息存储量,提高系统处理速度与实时响应性能;将拍摄的图像传递到应用终端的显示模块,操作人员根据可见光图像与红外图像进行异常火点区域的辨别,包括异常火点面积大小的大致判断;该基于无人机的异常火点监测方法,实现了异常火点区域如秸秆焚烧的监测简易化,简化了测量流程,降低了测量成本,效率较高,大大方便了实际工程人员的使用。
优选地,所述步骤四中可见光采集系统和红外采集系统对红外异常区域进行拍照时,所述无人机处于悬停状态或正常飞行状态,根据实际拍摄成像需要,操作人员根据控制装置对无人机进行控制。
优选地,所述无人机内还设有图像处理模块,所述步骤四中在进行可见光图像和红外图像成像后,所述图像处理模块将可见光图像和红外图像拼接后,再将拼接图像传输至应用终端。
优选地,所述应用终端内设有图像处理模块,所述步骤四中在进行可见光图像和红外图像成像后,将可见光图像与红外图像分别传输至应用终端后,由所述应用终端内的图像处理模块进行图像拼接,并在应用终端上的图像显示模块上进行显示。
在进行可见光图像和红外图像通过图像处理模块进行拼接,当所述图像处理模块设置在无人机内时,所述图像处理模块将可见光图像和红外图像拼接后再将拼接图像传输至应用终端;当所述图像处理模块设置在应用终端内时,则将可见光图像与红外图像分别传输至应用终端后,由所述应用终端内的图像处理模块进行图像拼接,并在应用终端上的图像显示模块上进行显示。
与现有技术相比,本发明的有益效果:
1、本发明所述一种基于无人机的异常火点监测系统,采用了无人机作为载体,以可见光采集系统与红外采集系统作为分别作为信息采集装置,其中可见光采集系统可以实现整体区域成像,以位置敏感探测器调整无人机飞行姿态,实现红外异常区域即异常火点区域的清晰成像,便于操作人员的分析与使用;该监测系统,克服了现有技术中基于卫星遥感监测的重复观察周期长,使用成本高,相关技术复杂,监测效果受环境影响大等缺点,开发基于无人机的异常火点检测系统,同时还提供了一种基于无人机的异常火点监测方法,该监测系统结构简单,操作方便,通过位置敏感探测器,能够准确判断异常火点的红外异常区域位置,简化了测量流程,降低了测量成本,效率较高,大大方了实际工程人员的使用,尤其适用于秸秆焚烧区域的监测、森林大火区域等情况的监测应用;
2、本发明所述一种基于无人机的异常火点监测系统,位置敏感探测器的镜头前设有可见光截止滤光片,用于将可见光过滤,红外光通过,异常火点区域如秸秆焚烧区域的拍摄效果更好;
3、本发明所述一种基于无人机的异常火点监测系统,包括设于无人机或者图像显示模块中的用于将可见光图像和红外图像进行拼接的图像处理模块,该图像处理模块可以利用动态图像拼接技术实现将分离可见光图像与红外图像分别拼接为一张完整图像,并在显示模块能够显示完整的可见光图像与红外图像,操作人员根据可见光图像与红外图像进行异常火点区域的辨别;
4、本发明所述一种基于无人机的异常火点监测方法,采用了上述的监测系统,通过无人机与图像处理相结合的方式实现异常火点区域如秸秆焚烧监测,在无人机上安装卫星导航模块,根据预设导航路径对待监测区域进行监测,无人机根据位置敏感探测器判断异常火点区域位置,自动规划无人机飞行路径,无人机飞行至异常火点正上方,再启动红外采集系统与可见光采集系统,用于采集监测区域中热源异常的红外图像信息和红外异常区域周边整体成像;在拍照时,启动红外采集系统与可见光采集系统,用于采集监测区域中热源异常的红外图像信息和红外异常区域周边整体成像,其中位置敏感探测器用于判断红外异常区域方向,并根据位置敏感探测器的检测结果随时调整无人机飞行姿态,方便采集较为清晰的图像信息;将拍摄的图像传递到应用终端的显示模块,操作人员根据可见光图像与红外图像进行异常火点区域如秸秆焚烧区域的辨别,包括异常火点面积大小的大致判断;该基于无人机的异常火点监测方法,实现了异常火点监测简易化,简化了测量流程,降低了测量成本,效率较高,大大方便了实际工程人员的使用。
附图说明:
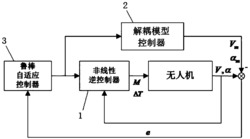
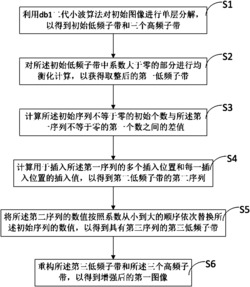
图1为本发明所述一种基于无人机的异常火点监测系统的监测流程图。
具体实施方式
下面结合试验例及具体实施方式对本发明作进一步的详细描述。但不应将此理解为本发明上述主题的范围仅限于以下的实施例,凡基于本发明内容所实现的技术均属于本发明的范围。
实施例1
一种基于无人机的异常火点监测系统,包括:
无人机,其中该无人机上设置有用于定位自身三维位置信息的卫星定位模块,用于采集地面图像的可见光采集系统与红外采集系统,用于判断异常火点区域在监测视角中相对视角中心位置的敏感探测器,优选位置敏感探测器包括四个光电探测器,分别用于监测视角中心左方、右方、前方和后方四个象限位置区域;
应用终端,包括用于控制无人机飞行的控制装置以及用于显示监测区域的图像和无人机三维位置信息的图像显示模块。
其中,上述的可见光采集系统与红外采集系统为共轴图像采集系统,该轴图像采集系统用于在同一张图像成像时同时拍摄红外图像和可见光图像,成像方便简单。为了使位置敏感探测器更好的监测红外异常区域,在每个光电探测器前方设有可见光截止滤光片,用于将可见光过滤,红外光通过,异常火点区域如秸秆焚烧区域的拍摄效果更好。为了显示红外异常区域的更多坐标信息,在无人机上还包括用于测量其相对地面高度的高度传感器,用于相对地面高度的测量,用于显示秸秆焚烧红外区域图像时,显示拍摄高度的坐标信息。
上述的位置敏感探测器为四象限位置敏感探测器,该四象限位置敏感探测器,即相对位置敏感探测器视角中心的左方、右方、前方和后方四个象限位置,其分别采用了四个光电探测器分别进行检测红外异常区成像在视角的位置,当其成像位置不在光轴上,对该成像信号的幅度和位置进行判断,自动控制无人机做位置调整使得探测到的红外异常区成像信息调整到光轴中心位置,即使可见光采集系统与红外采集系统的成像视角正对红外异常区域。具体的,当秸秆焚烧红外异常区域位于位置敏感探测器的中心视角偏左方时,反馈给无人机控制其姿态自动朝左边进行偏转调节,使可见光采集系统和红外采集系统的光轴中心视角位置对准秸秆焚烧红外异常区域,便于成像更加清楚。
另外,无人机或者图像显示模块中还设有用于将可见光图像和红外图像进行拼接的图像处理模块。该图像处理模块可以利用动态图像拼接技术实现将分离可见光图像与红外图像分别拼接为一张完整图像,并在显示模块能够显示完整的可见光图像与红外图像,操作人员根据可见光图像与红外图像进行异常火点区域的辨别。当图像处理模块集成到应用终端中时,无人机将可见光采集系统与红外采集系统拍摄的照片传输至应用终端,在应用终端实现图像的动态拼接。
本发明所述一种基于无人机的异常火点监测系统,其中无人机中卫星导航模块用于输入监测区域的导航路径信息并用于对无人机的飞行路径导航,红外采集系统与可见光采集系统用于采集监测区域的图像信息,其中红外采集系统用于监测区域中热源异常的红外图像信息,位置敏感探测器用于判断红外异常区域方向,无人机根据位置敏感探测器的检测结果调整无人机飞行姿态,可见光采集系统用于对红外异常区域所在的整体区域进行成像,使得可见光采集系统与红外采集系统正对红外异常区域,便于采集清晰的图像信息;应用终端的显示模块用于显示完整的可见光图像与红外图像,操作人员根据可见光图像与红外图像进行异常火点区域如秸秆焚烧区域的辨别,并利用控制装置控制无分机的飞行;该基于无人机的异常火点监测方式,避免了传统监测系统依赖于遥感监测卫星,避免了重复观察周期长、使用成本高、相关技术复杂、监测效果受环境影响大等弊端,利用无人机作为监测载体,利用可见光采集系统与红外采集系统收集监测区域的图像信息,利用位置敏感器件检测值控制无人机飞行姿态,实现红外异常区域的清晰图像采集,利用动态图像拼接技术实现监测区域图像完整显示;该监测系统结构简单,操作方便,通过四个光电探测器组成的位置敏感探测器,能够准确判断异常火点的红外异常区域位置,简化了测量流程,降低了测量成本,效率较高,大大方便了实际工程人员的使用,也便于涉及到市、县、镇、乡等所在区域异常火点监测的实际应用。
实施例2
如图1所示,本实施例还提供了一种基于无人机的异常火点监测方法,包括使用实施例1中的一种基于无人机的异常火点监测系统,其测量方法包括以下步骤:
步骤一、预设无人机飞行路径,启动所述无人机,无人机根据预设导航路径飞行至导航起始位置;
步骤二、检测红外异常区,无人机沿着导航路径向前飞行时,启动所述无人机上的可见光采集系统与红外采集系统,采集异常火点红外异常区域信息,所述位置敏感探测器的各光电探测器采集红外异常区域在视角中心的相对位置信息;当可见光采集系统与红外采集系统并未采集到异常火点对应的红外异常区域信息时,无人机按照预设飞行路径继续飞行,直到采集到异常火点红外异常区域为止;
步骤三、根据位置敏感探测器检测到的红外异常区域位置信息,自动规划无人机飞行路径,使无人机飞行至异常火点红外异常区域正上方;
步骤四、无人机对异常火点红外异常区域采集成像,调整无人机飞行姿态,使所述可见光采集系统与红外采集系统朝下正对红外异常区域,所述可见光采集系统与红外采集系统分别对红外异常区域进行拍照成像,将可见光图像与红外图像分别传输至应用终端,并在应用终端进行显示;
步骤五、无人机回到预设导航路径继续飞行,重复所述步骤二至步骤四,在飞行过程中根据位置敏感探测器检测红外异常区域的信息,不断调整无人机飞行路径和飞行姿态,并在异常火点红外异常区域上方启动所述可见光采集系统与红外采集系统拍照成像,分别将可见光图像与红外图像分别传输至应用终端,并在应用终端进行显示;
步骤六、无人机完成预设导航路径飞行后,无人机降落至起飞位置,系统完成待测区域的异常火点监测。
其中,上述述步骤四中可见光采集系统和红外采集系统对红外异常区域进行拍照时,所述无人机处于悬停状态或正常飞行状态,根据实际拍摄成像需要,操作人员根据控制装置对无人机进行控制。另外,如果步骤二中无人机在完成整个预设导航飞行路径,均未采集到异常区域时,则判断该区域并未出现异常区域情况,则一直沿着预设导航飞行路径完成整个飞行,并回到飞行起点。
其中,上述步骤四中在进行可见光图像和红外图像通过图像处理模块进行拼接,当所述图像处理模块设置在无人机内时,所述图像处理模块将可见光图像和红外图像拼接后再将拼接图像传输至应用终端;当所述图像处理模块设置在应用终端内时,则将可见光图像与红外图像分别传输至应用终端后,由所述应用终端内的图像处理模块进行图像拼接,并在应用终端上的图像显示模块上进行显示。
另外,考虑异常火点区域并非都位于导航自动规划路径上,为了避免无人机根据新的规划路径飞行至异常火点区域正上方拍照成像完毕后,偏离导航自动规划路径范围太多,预先设置导航预设路径所围成区域的偏离范围值,如预设10km为偏离范围值,超出10km范围之外的区域即使通过可见光采集系统和红外采集系统判断有热源异常区或异常火点区,无人机将其排除在拍照目标范围之外,以便无人机能够尽可能的将本区域范围内的异常火点高效率完成拍照成像。
该基于无人机的异常火点监测系统的测量方法,采用了上述的监测系统,通过无人机与图像处理相结合的方式实现异常火点监测,在无人机上安装卫星导航模块,根据预设导航路径对待监测区域进行监测,无人机根据位置敏感探测器判断异常火点区域位置,自动规划无人机飞行路径,无人机飞行至异常火点正上方,再启动红外采集系统与可见光采集系统,用于采集监测区域中热源异常的红外图像信息和红外异常区域周边整体成像,另外,位置敏感探测器还用于判断红外异常区域方向,并根据位置敏感探测器的检测结果随时调整无人机飞行姿态,方便采集较为清晰的图像信息;将拍摄的图像传递到应用终端的显示模块,操作人员根据可见光图像与红外图像进行异常火点区域如秸秆焚烧区域的辨别,并利用控制装置控制无分机的飞行;该基于无人机的异常火点监测方法,实现了异常火点监测简易化,简化了测量流程,降低了测量成本,效率较高,大大方便了实际工程人员的使用。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
一种基于无人机的异常火点监测系统及监测方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0