






专利摘要
本发明公开了一种并联式四驱交叉驱动差速器,包括差速器壳体,差速器壳体内通过轴承转动安装有并联式的行星齿架,行星齿架整体固定于从动齿轮上,左、右从动齿轮通过左、右行星齿架内的左、右行星齿轮和分别连接于左、右行星齿轮上的前左、右半轴和后左、右半轴导出,交叉齿轮二与前右半轴之间通过轴承连接。本发明采用X型交叉驱动的方式,使位于前、后交叉位置上的车轮同时驱动,能使汽车在任何可以行使的路面上都有足够的稳定性,前后车轮之间不会出现滑转和偏移现象,在行驶过程中只要有三个轮子触地就可以提供足够的动力,并且本发明的体积小,节省能源,减少了不必要的能源损耗。
权利要求
1.并联式四驱交叉驱动差速器,包括差速器壳体,其特征在于:所述的差速器壳体内通过轴承转动安装有左、右行星齿架,左、右行星齿架整体固定于左、右从动齿轮上,所述的左、右从动齿轮通过左、右行星齿架内的左、右行星齿轮和分别连接于左、右行星齿轮上的前左、右半轴和后左、右半轴导出;
所述的前右半轴、后右半轴上分别安装有交叉齿轮一和交叉齿轮二,差速器壳体内转动安装有交叉齿轮三并与交叉齿轮二啮合,交叉齿轮二和交叉齿轮三将动力导出;
所述的交叉齿轮二与前右半轴之间通过轴承连接。
2.根据权利要求1所述的并联式四驱交叉驱动差速器,其特征在于:所述的左、右从动齿轮通过主动齿轮外接动力源驱动整个差速器。
3.根据权利要求1所述的并联式四驱交叉驱动差速器,其特征在于:所述的左行星齿轮驱动前左、右半轴带动一组位于交叉位置的前后轮;交叉齿轮三和右行星齿轮驱动后左半轴带动另一组位于交叉位置的前后轮。
说明书
技术领域
本发明涉及差速器领域,具体的是一种并联式四驱交叉驱动差速器。
背景技术
根据汽车行驶的原理,对角线上的车轮转速之和相等,所以可以交叉驱动。而现有的普通四驱车采用前轮和后轮分开驱动的方式,导致普通四驱车不能以过高的速度行驶,否则容易出现滑转和偏移现象,在情况复杂的路面则更容易出现过分颠簸,驾驶不稳定等问题,影响行驶的舒适性和安全性。
发明内容
本发明为解决现有技术中的不足,提供了一种并联式四驱交叉驱动差速器。
本发明的技术方案:
并联式四驱交叉驱动差速器,包括差速器壳体,其特征在于:所述的差速器壳体内通过轴承转动安装有左、右行星齿架,左、右行星齿架整体固定于左、右从动齿轮上,所述的左、右从动齿轮通过左、右行星齿架内的左、右行星齿轮和分别连接于左、右行星齿轮上的前左、右半轴和后左、右半轴导出;
所述的前右半轴、后右半轴上分别安装有交叉齿轮一和交叉齿轮二,差速器壳体内转动安装有交叉齿轮三并与交叉齿轮二啮合,交叉齿轮二和交叉齿轮三将动力导出;
所述的交叉齿轮二与前右半轴之间通过轴承连接。
所述的并联式四驱交叉驱动差速器,其特征在于:所述的左、右从动齿轮通过主动齿轮外接动力源驱动整个差速器。
所述的左行星齿轮驱动前左、右半轴带动一组位于交叉位置的前后轮;交叉齿轮三和右行星齿轮驱动后左半轴带动另一组位于交叉位置的前后轮。
其中交叉齿轮二与前右半轴之间通过轴承连接,没有直接的传动和被传动的关系,交叉齿轮一通过交叉齿轮二将动力传输至交叉齿轮三上以输出。
本发明的优点:
本发明采用X型交叉驱动的方式,使位于前、后交叉位置上的车轮同时驱动,能使汽车在任何可以行使的路面上都有足够的稳定性,前后车轮之间不会出现滑转和偏移现象,在行驶过程中只要有三个轮子触地就可以提供足够的动力,并且本发明的体积小,节省能源,减少了不必要的能源损耗。
附图说明
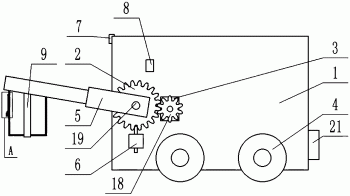
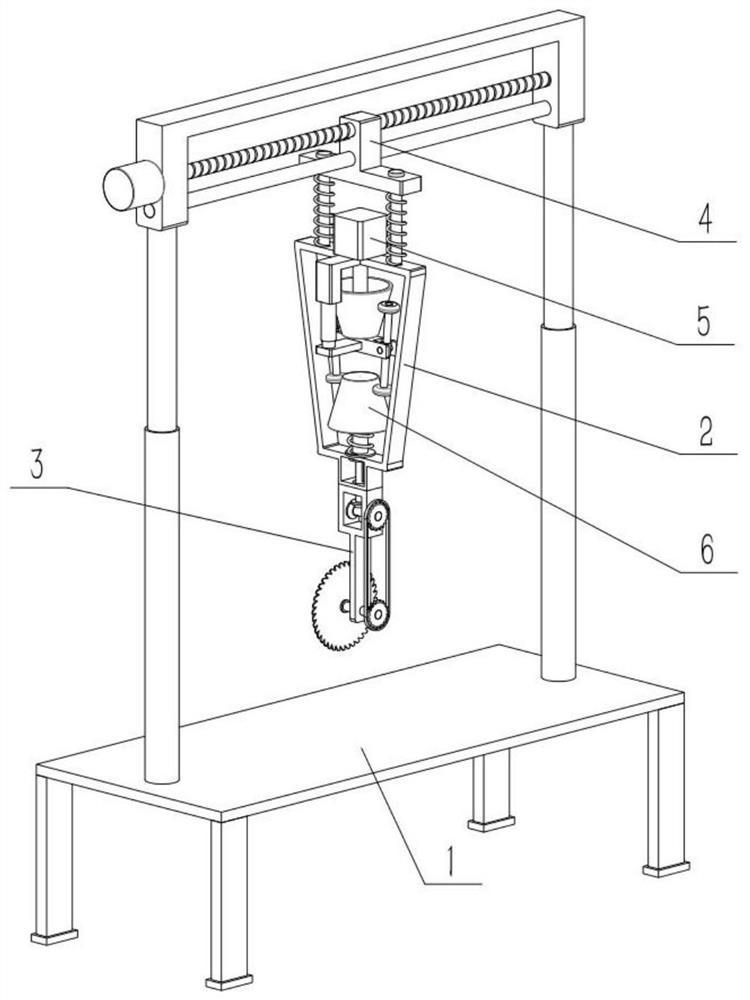
图1为本发明的结构示意图。
具体实施方式
参见附图,并联式四驱交叉驱动差速器,包括差速器壳体1,差速器壳体1内通过轴承转动安装有左、右行星齿架2、3,左、右行星齿架2、3整体固定于左、右从动齿轮4、5上,左、右从动齿轮4、5通过左、右行星齿架2、3内的左、右行星齿轮6、7和分别连接于左、右行星齿轮6、7上的前左、右半轴8、9和后左、右半轴10、11导出;
前右半轴9、后右半轴10上分别安装有交叉齿轮一12和交叉齿轮二13,差速器壳体1内转动安装有交叉齿轮三14并与交叉齿轮二13啮合,交叉齿轮二13和交叉齿轮三14将动力导出;
交叉齿轮二13与前右半轴9之间通过轴承连接。
左、右从动齿轮4、5通过主动齿轮15外接动力源驱动整个差速器。
左行星齿轮6驱动前左、右半轴8、9带动一组位于交叉位置的前后轮;交叉齿轮三14和右行星齿轮7驱动后左半轴11带动另一组位于交叉位置的前后轮。
并联式四驱交叉驱动差速器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0