






专利摘要
一种平流层飞艇定点安全回收方法,包括:平流层飞艇定点安全回收策略、平流层飞艇安全回收预测降落轨迹算法、平流层飞艇低空安全回收方法及平流层飞艇安全回收装置设计方法。该方法实现飞艇的定点安全返场回收,易于实现,保证飞艇部件100%完好回收。飞艇配备高低空两套推进系统,无需额外添加调速与变桨矩机构,适应高低空飞行工况,增加了其动力系统可靠性。本方法中预测降落技术使飞艇无需在急风区进行大动力机动飞行,降低了其动力系统和能源系统的设计约束,降低了急风区进行动力飞行所带来的风险。降落装置的设计可有效降低飞艇降落过程中由于侧风所引起的飞行事故,提高回收安全性;回收平台可大幅度降低未知风险,提高回收效率。
权利要求
1.一种平流层飞艇定点安全回收方法,其特征在于,包括下述四个步骤:
步骤1:机动至预测降落启动点
1.1平流层飞艇根据当前风场和预定降落区域位置,利用预测降落算法计算高空开始实施降落程序时所需的初始位置;
1.2平流层飞艇利用航路规划算法规划由飞艇当前位置飞往高空启动降落时的预定位置的平面航路;
1.3平流层飞艇利用航路跟踪算法跟踪上述步骤所规划航路,飞行至预定的高空启动降落点;
步骤2:成形穿越急流区
2.1在平流层飞艇飞至预定的高空启动降落位置后,关闭高空推进装置,同时打开氦气阀门,启动降落程序;
2.2在平流层飞艇维持气动外形无动力降落过程中,需要通过调节浮力控制系统,对其囊体压差与降落速度进行调节;该浮力控制系统由飞艇的构型决定,单囊体飞艇为氦气阀门;组合囊体飞艇为主副气囊阀门,分别调节氦气囊与空气囊压强;
2.3在平流层飞艇降落至预定低空高度时,调节囊体压差至合理范围后关闭氦气阀门,同时打开低空推进装置;
步骤3:低空机动返场
3.1在平流层飞艇抵达预定低空高度时,由于预测模型与预报风场存在的误差,飞艇位置会偏离降落装置上空;飞艇根据当前低空风场、当前位置与降落装置位置,利用航路跟踪算法规划低空机动返场三维航路;
3.2平流层飞艇用三维航路跟踪算法跟踪前述步骤中所规划三维航路使飞艇机动至降落装置上空;
3.3在平流层飞艇抵达降落装置上空5~50m高度时,关闭低空推进装置;
步骤4:降落回收
4.1在平流层飞艇低空机动返场的同时,布置降落装置进行降落准备,将安全回收平台布置至预定位置,并展开降落缓冲网;降落装置主体为布有充气式缓冲网的大面积柔性平台;
4.2在飞艇飞至降落装置上空5~50m高度时,关闭低空推进装置,调整飞艇姿态使其与安全回收平台平行,关闭调姿装置,实施快速放气,使飞艇迅速降落至降落缓冲网上;然后,继续放气,同时利用锚固绳索将飞艇与缓冲网固定;降落完成后,工作人员对飞艇各部件进行分解回收;
4.3回收完成后进行转场运输,进行全面检测与维护,准备下次飞行任务。
2.根据权利要求1所述的一种平流层飞艇定点安全回收方法,其特征在于:步骤1在20km以上空域,风速低于平流层飞艇高空额定巡航速度,为25m/s;
步骤2在2~20km高度空域,无风速要求;步骤3在距离地面50m~2km高度空域,风速小于平流层飞艇低空额定巡航速度,为15m/s;步骤4在50m以下高度空域,风速小于5m/s。
3.根据权利要求1所述的一种平流层飞艇定点安全回收方法,其特征在于:
步骤1中,当前风场由气象保障部门按照固定时间间隔与高度间隔提供,且该当前风场为预测数据;预定降落区域位置为定点回收场固定位置;初始位置为飞艇由组合导航设备所测得的当前实际位置;预测降落算法由飞艇六自由度运动学与动力学模型、热力学模型与外部风场构成,用于估算飞艇在维持形状的前提下依靠重力无动力穿越高空至低空区间的水平面内位置变化。
4.根据权利要求1所述的一种平流层飞艇定点安全回收方法,其特征在于:步骤1中航路跟踪算法由三部分构成:制导律、姿态跟踪算法及控制分配算法;制导律根据当前位置和期望位置差解算期望姿态;姿态跟踪算法计算跟踪该期望姿态所需的虚拟控制量;控制分配算法将上述虚拟控制量解算至飞艇实际控制量。
5.根据权利要求1所述的一种平流层飞艇定点安全回收方法,其特征在于:
步骤2中该氦气阀门的控制操作依据飞艇内外压差动态调节。
6.根据权利要求1所述的一种平流层飞艇定点安全回收方法,其特征在于:
步骤3中该三维航路跟踪算法由三部分构成:三维制导律、姿态跟踪算法、控制分配算法,制导律根据当前位置和期望位置差解算跟踪三维航路所需的期望姿态,姿态跟踪算法计算跟踪该期望姿态所需的虚拟控制量,控制分配算法将上述虚拟控制量解算至飞艇实际控制量。
7.根据权利要求1所述的一种平流层飞艇定点安全回收方法,其特征在于:
步骤4中回收平台由四根支柱支起一张降落缓冲网,该缓冲网上布置有降落缓冲材料与锚固绳索。
8.根据权利要求1或7所述的一种平流层飞艇定点安全回收方法,其特征在于:降落缓冲材料为充气拉网。
说明书
技术领域
本发明提供一种平流层飞艇定点成形返场并安全回收方案,它为平流层飞艇提供一种易于实现的成形安全回收方案,属于平流层飞艇设计技术领域。
背景技术
随着科技的不断发展,全球范围内的无线网络覆盖、地球遥感成像、空间观测、大气测量、资源监控以及军事侦察等方面的需求越来越强烈。发展可靠的平流层飞行器平台是解决上述需求问题的有效手段之一。平流层飞艇是目前主流的平流层低动态平台,相对于其他类型飞行器,平流层飞艇具有驻留时间长、造价低廉、覆盖区域广、响应相对迅速等优点,因而成为近年来各国争相发展的热点领域之一。
作为开发临近空间的工具,平流层飞艇必须具备完整的升空、驻空与降落能力。平流层飞艇的升空与驻空环节已提出了多种方案,并得到了相应的飞行试验验证;其降落方案尚未有相对成熟的解决方案。目前,绝大多数的平流层飞艇降落为非成形降落。非成形降落方案实现简单,易于控制。但是,非成形降落方案随机性较大,无法保证所有部件100%完好定点回收。因此,开发具备高可靠性、高复用能力的降落方案是实现平流层飞艇应用的重要内容之一。
平流层飞艇惯量较大、动力系统相对较弱,横跨高空和低空两个空域的飞艇控制难度较大,因此平流层飞艇的精确返场回收技术难度较高。此外,大型低空常规飞艇返场飞回艇库时易受侧风影响,发生碰撞事故,存在较大的安全隐患,是飞艇应用受限的原因之一。平流层飞艇实现高可靠性回收,需解决大尺寸、大惯量飞行器精确安全返场问题,避免返场事故发生。
发明内容
本发明从工程实际出发,利用现有平流层飞艇技术,结合其降落实际工况,提供了一种具备高可靠性、高复用能力的成形安全回收方案。
本发明的流程为:
平流层飞艇定点成形返场回收方案由机动至预测落点、穿越急流区、低空返场和降落回收四个步骤组成。首先,利用预测降落轨迹算法反向推算高空启动降落位置,并控制飞艇飞至该预定位置,关闭高空推进装置;然后,启动降落程序,利用主囊体阀门与副气囊阀门调节飞艇维形,快速穿越急流区;接着,在飞艇抵达预定高度后,启动低空推进装置,控制飞艇飞至地面降落区域上空(低空三维降落);最后,飞艇抵达降落位置上空5~50m处,启动快速放气,使飞艇降落至预定保护区。
本发明一种平流层飞艇定点成形返场方案由以下部分组成:
1.平流层飞艇定点安全回收策略
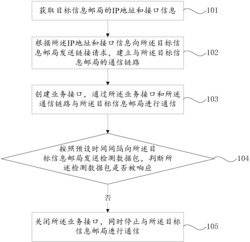
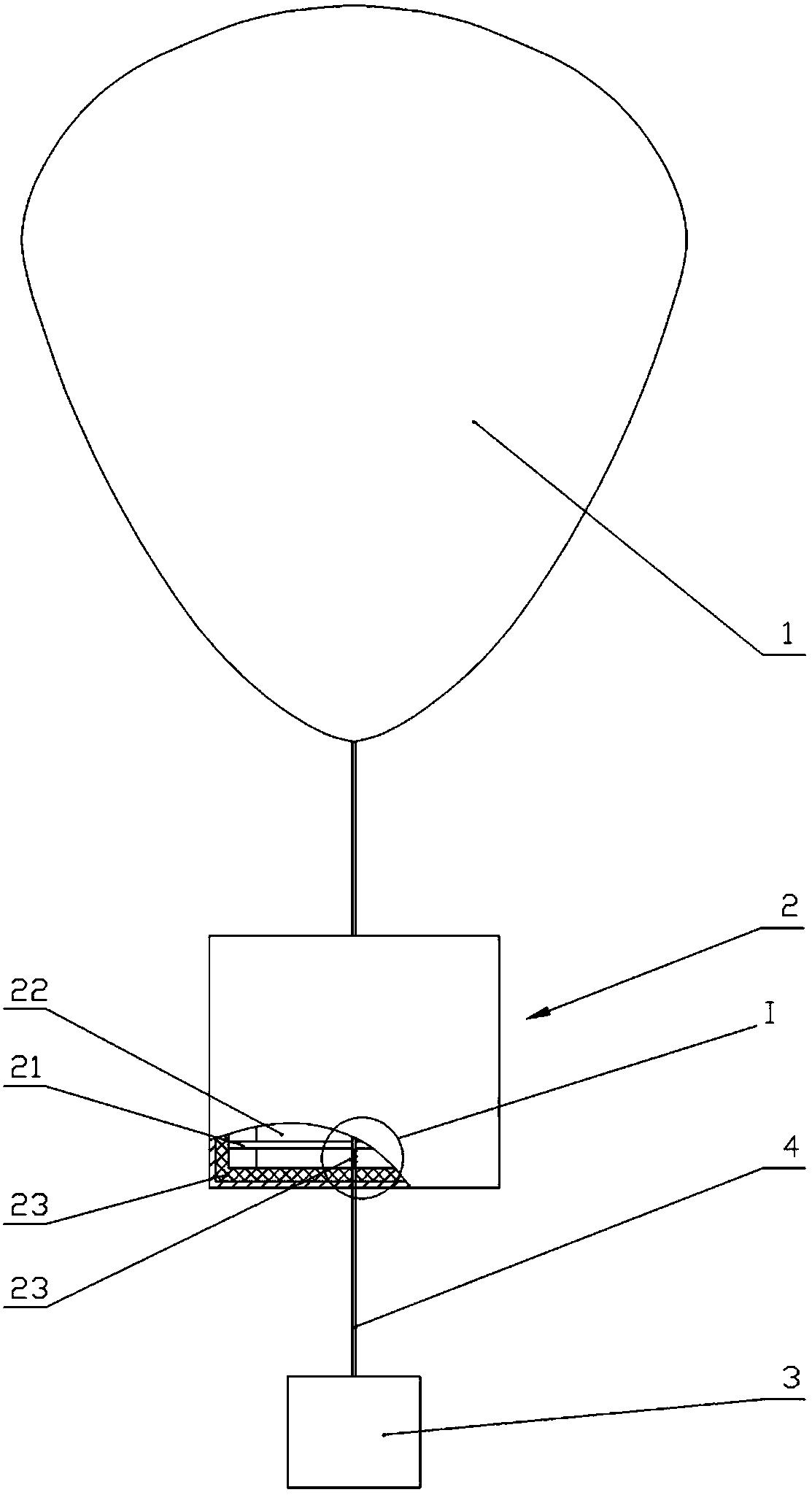
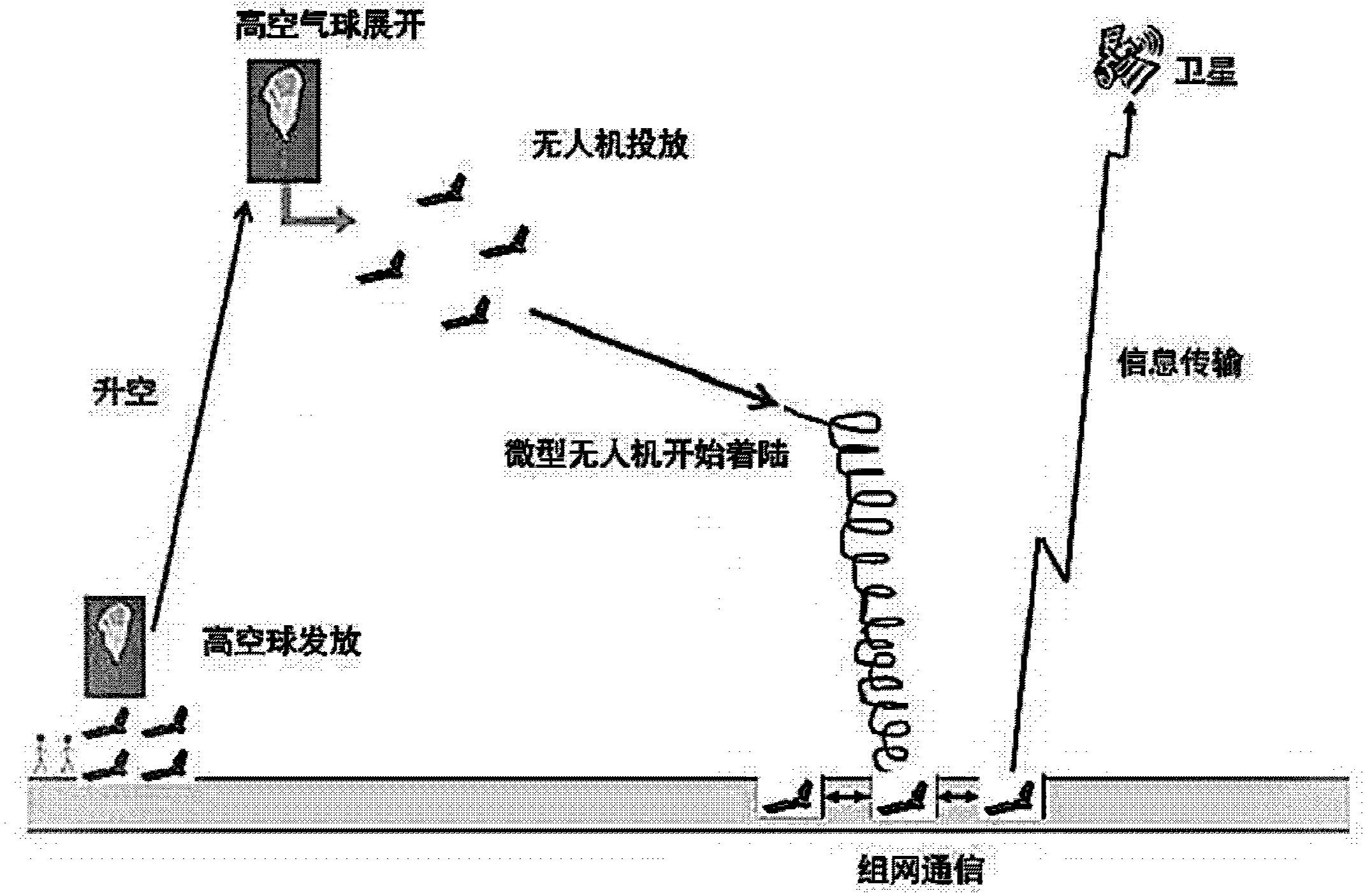
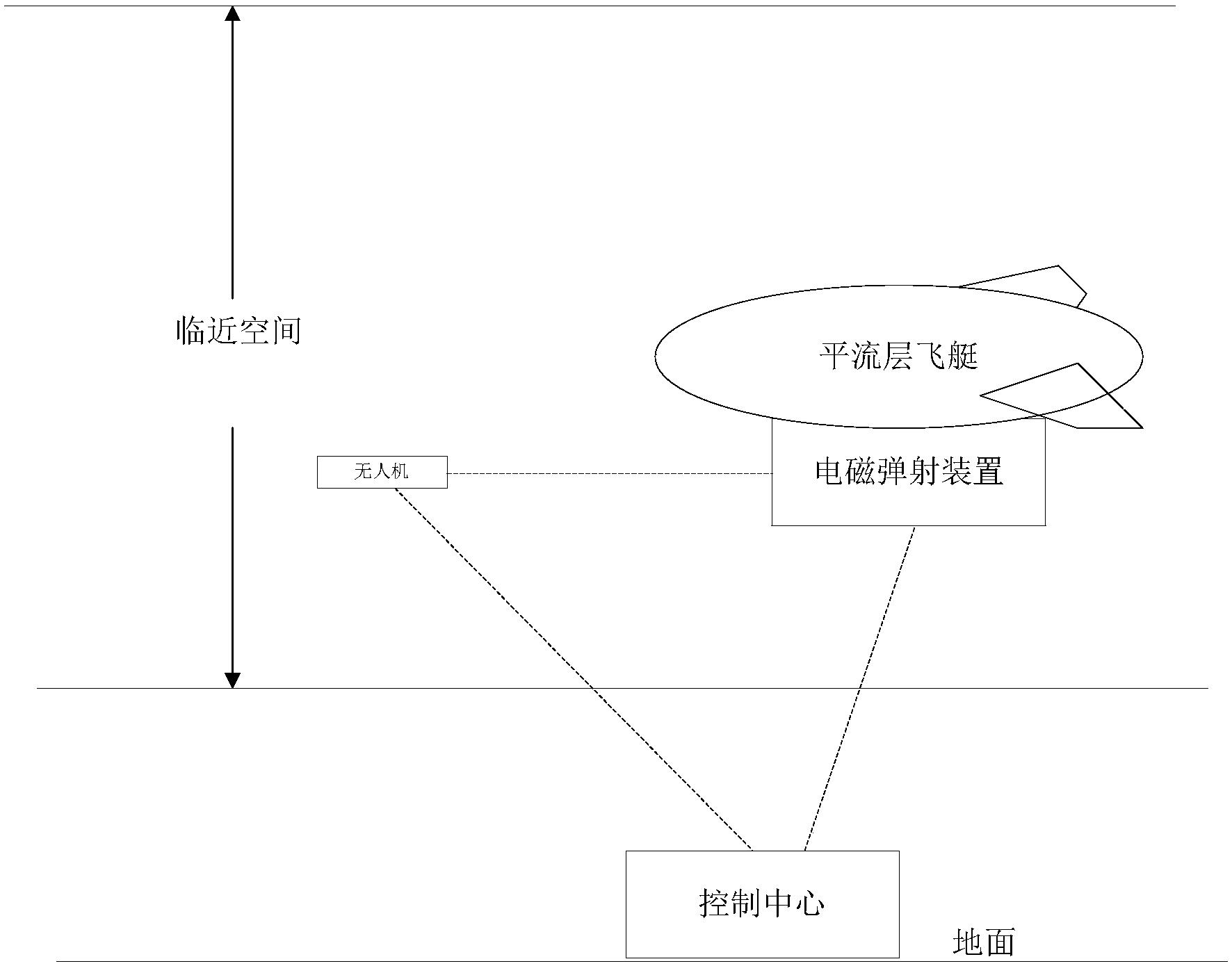
如图1所示,平流层飞艇定点安全回收方策略由以下四个步骤组成:机动至预测起始落点、安全穿越急流区、低空安全返场和安全降落回收。平流层飞艇经过降落轨迹预测算法,解算出降落至预定落点所需的高空位置,机动飞行至高空预定位置启动降落程序;利用浮力调节系统进行飞艇维形,快速安全穿越对流层急流区;利用低空推进系统进行低空返场机动;机动至预定降落装置后实施快速放气与分解回收。
2.平流层飞艇安全回收预测降落轨迹算法
平流层飞艇降落时所需穿越的对流层气象环境复杂,部分高度急风区风速可达50m/s。且随着高度变化,大气密度变化剧烈,飞艇动力系统的效率波动较大。因此,体积庞大、动力较弱的飞艇无法在急风区保持持续动力飞行,需要无动力快速穿越急流区。本方案中在启动降落前,平流层飞艇利用预测降落算法计算在当前风场环境下降落至回收场上空所需要的高空启动点,规划由当前位置飞行至该启动点的直线航路,并对其进行跟踪,使飞艇飞行至该位置,关闭高空动力系统,启动降落程序。
3.平流层飞艇低空安全回收方法
由于气象预报和预测降落模型的误差,飞艇在降至低空时,会与回收场的平面位置具有一定误差,本方案利用低空机动回收方法消除此误差。首先,根据平流层飞艇当前位置与回收场位置规划三维航路;然后,启动低空动力系统,利用三维路径跟踪算法跟踪该航路,机动至降落装置上空5~50m处,进行快速放气,实施分解回收。
4.平流层飞艇安全回收装置设计方案
本方案针对平流层飞艇自身特点进行降落回收装置设计,改进常规飞艇返场降落方案。如图所示,降落装置避开高大建筑区,布置于平坦开阔地面。降落装置主体为布有充气式缓冲拉网的大面积柔性平台。飞艇低空机动飞行至柔性平台上空5~50m处后,关闭所有推进系统,打开所有阀门,实施快速放气,使飞艇以较小的速度降落至柔性平台,降落过程中注意保护囊体和其他部件;降落完成后,工作人员对飞艇各部件进行分解回收。回收完成进行转场运输,对其进行全面检测与维护,准备进行下次飞行任务。
下面将本发明的技术方案详述如下:一种平流层飞艇定点安全回收方法,包括下述四个步骤:
步骤一:机动至预测降落启动点(20km以上空域,风速低于平流层飞艇高空额定巡航速度,约为25m/s)
1)平流层飞艇根据当前风场和预定降落区域位置,利用预测降落算法计算高空开始实施降落程序时所需的初始位置。其中,
该当前风场由气象保障部门按照固定时间间隔与高度间隔提供,且该当前风场为预测数据;
该预定降落区域位置为定点回收场固定位置;
该初始位置为飞艇由组合导航设备所测得的当前实际位置;
该预测降落算法由飞艇六自由度运动学与动力学模型、热力学模型与外部风场构成,主要用于估算飞艇在维持形状的前提下依靠重力无动力穿越高空至低空区间的水平面内位置变化。
2)平流层飞艇利用航路规划算法规划由飞艇当前位置飞往高空启动降落时的预定位置的平面航路。其中,启动降落点位置由上步预测降落落点在相反方向平移得到。由于高空空域较为自由,因此所规划航路一般为直线航路。
3)平流层飞艇利用航路跟踪算法跟踪上述所规划航路,飞行至预定的高空启动降落点。该航路跟踪算法由三部分构成:制导律、姿态跟踪算法及控制分配算法;制导律根据当前位置和期望位置差解算期望姿态;姿态跟踪算法计算跟踪该期望姿态所需的虚拟控制量;控制分配算法将上述虚拟控制量解算至飞艇实际控制量,如电机转速等;
步骤二:成形穿越急流区(2~20km高度空域,无风速要求)
1)在平流层飞艇飞至预定的高空启动降落位置后,关闭高空推进装置,同时打开氦气阀门,启动降落程序。其中,该氦气阀门的控制操作依据飞艇内外压差动态调节。
2)在平流层飞艇维持气动外形无动力降落过程,需要通过调节浮力控制系统,对其囊体压差与降落速度进行调节。该浮力控制系统由飞艇的构型决定,如单囊体飞艇为氦气主阀门;组合囊体飞艇为主副气囊阀门,分别调节氦气囊与空气囊压强。
3)在平流层飞艇降落至预定低空高度时,调节囊体压差至合理范围(维持囊体流线外形)后关闭氦气阀门,同时打开低空推进装置。
步骤三:低空机动返场(距离地面50m~2km高度空域,风速小于平流层飞艇低空额定巡航速度,约为15m/s)
1)在平流层飞艇抵达预定低空(如2km)高度时,由于预测模型与预报风场存在的误差,飞艇位置会偏离降落装置上空。飞艇根据当前低空风场、当前位置与降落装置位置,利用航路跟踪算法规划低空机动返场三维航路。
2)平流层飞艇用三维航路跟踪算法跟踪前述所规划三维航路使飞艇机动至降落装置上空。该三维航路跟踪算法由三部分构成:三维制导律、姿态跟踪算法、控制分配算法,制导律根据当前位置和期望位置差解算跟踪三维航路所需的期望姿态,姿态跟踪算法计算跟踪该期望姿态所需的虚拟控制量,控制分配算法将上述虚拟控制量解算至飞艇实际控制量,如电机转速等;
3)在平流层飞艇抵达降落装置上空5~50m高度时,关闭低空推进装置。
步骤四:降落回收(50m以下高度空域,风速小于5m/s)
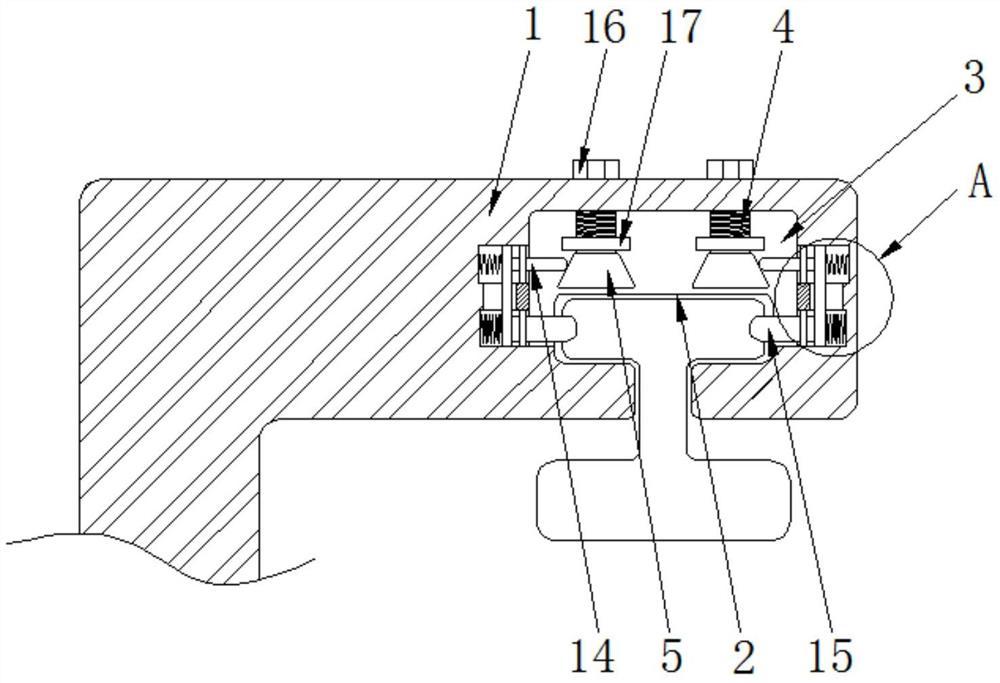
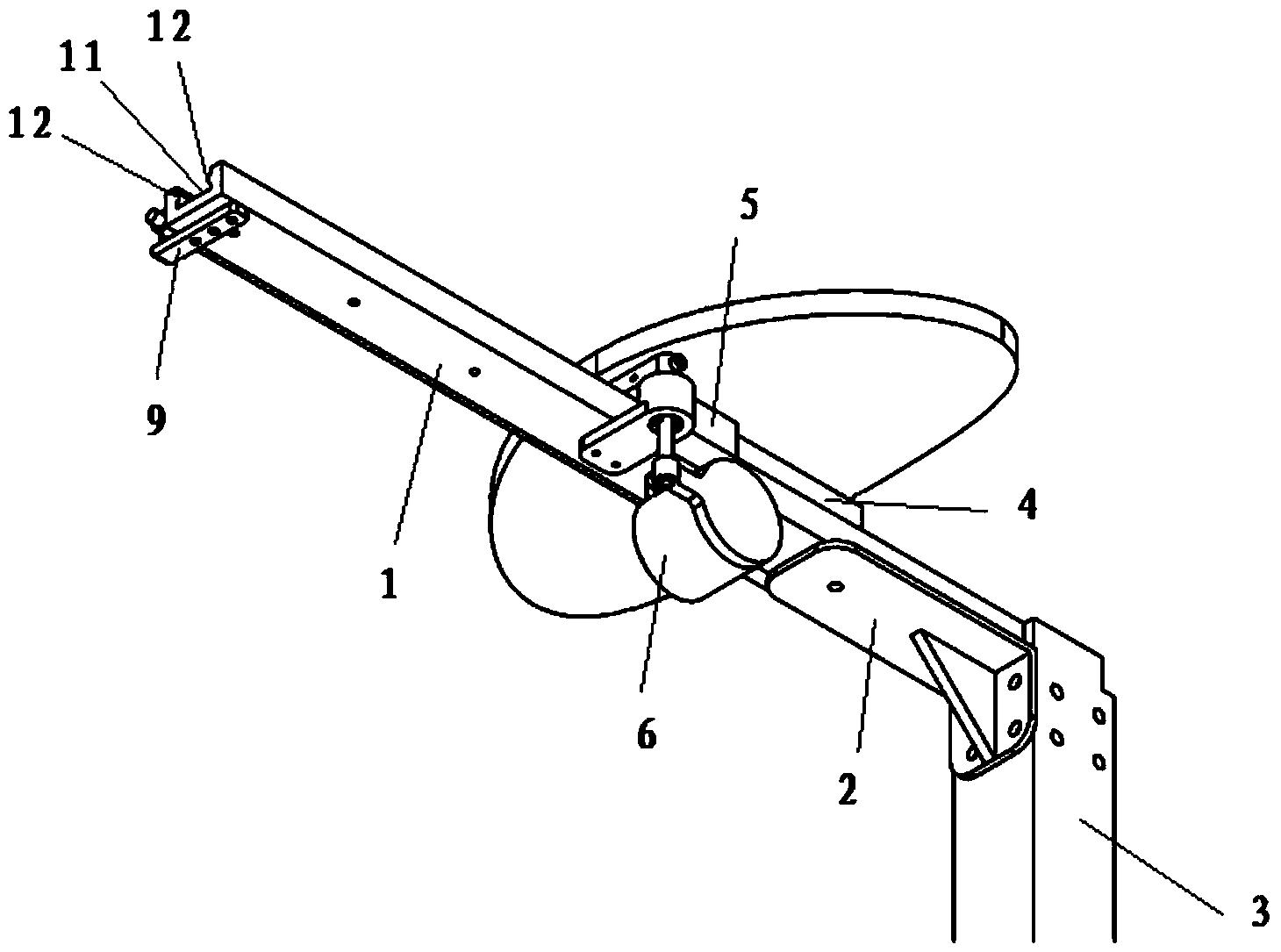
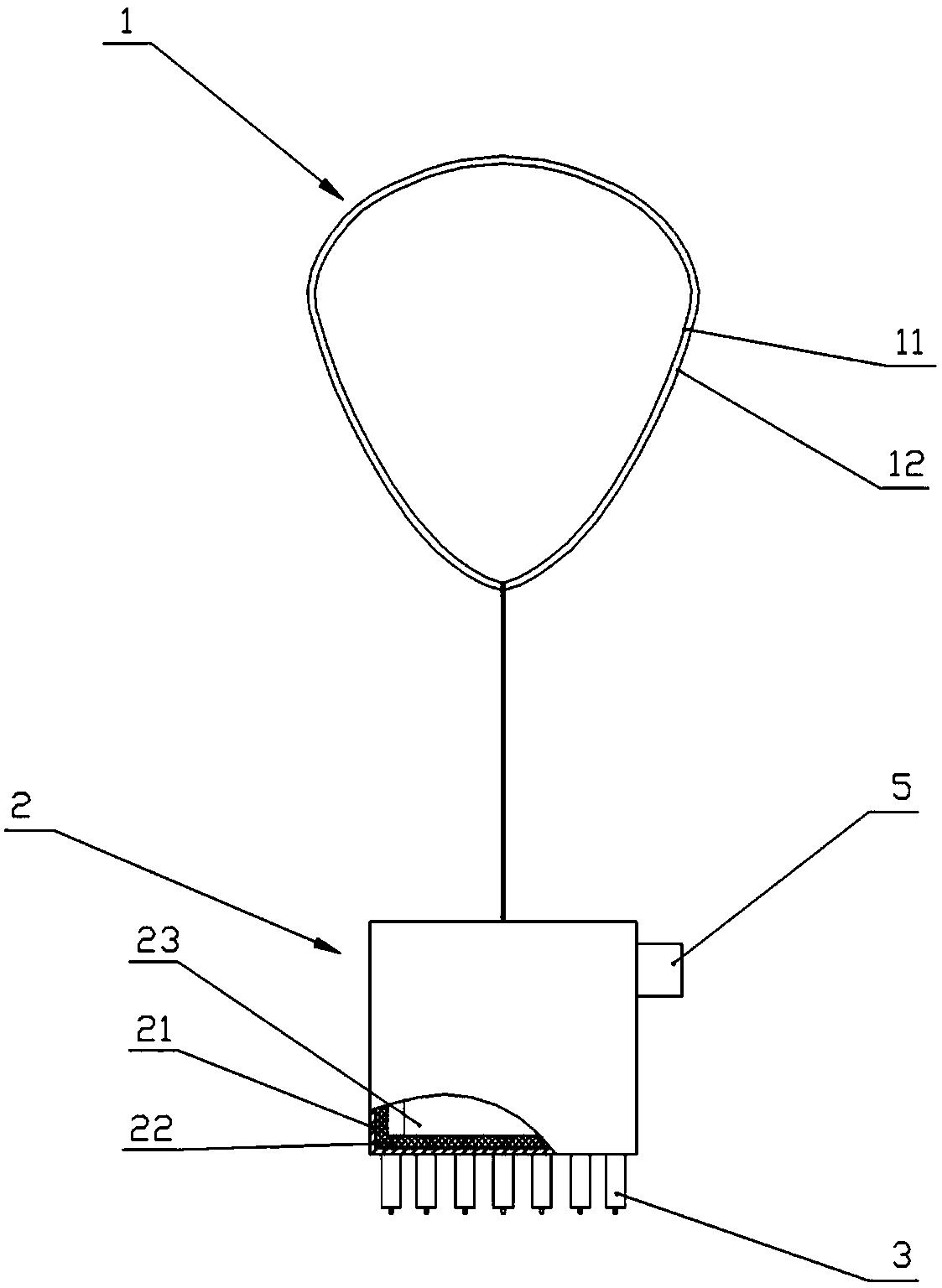
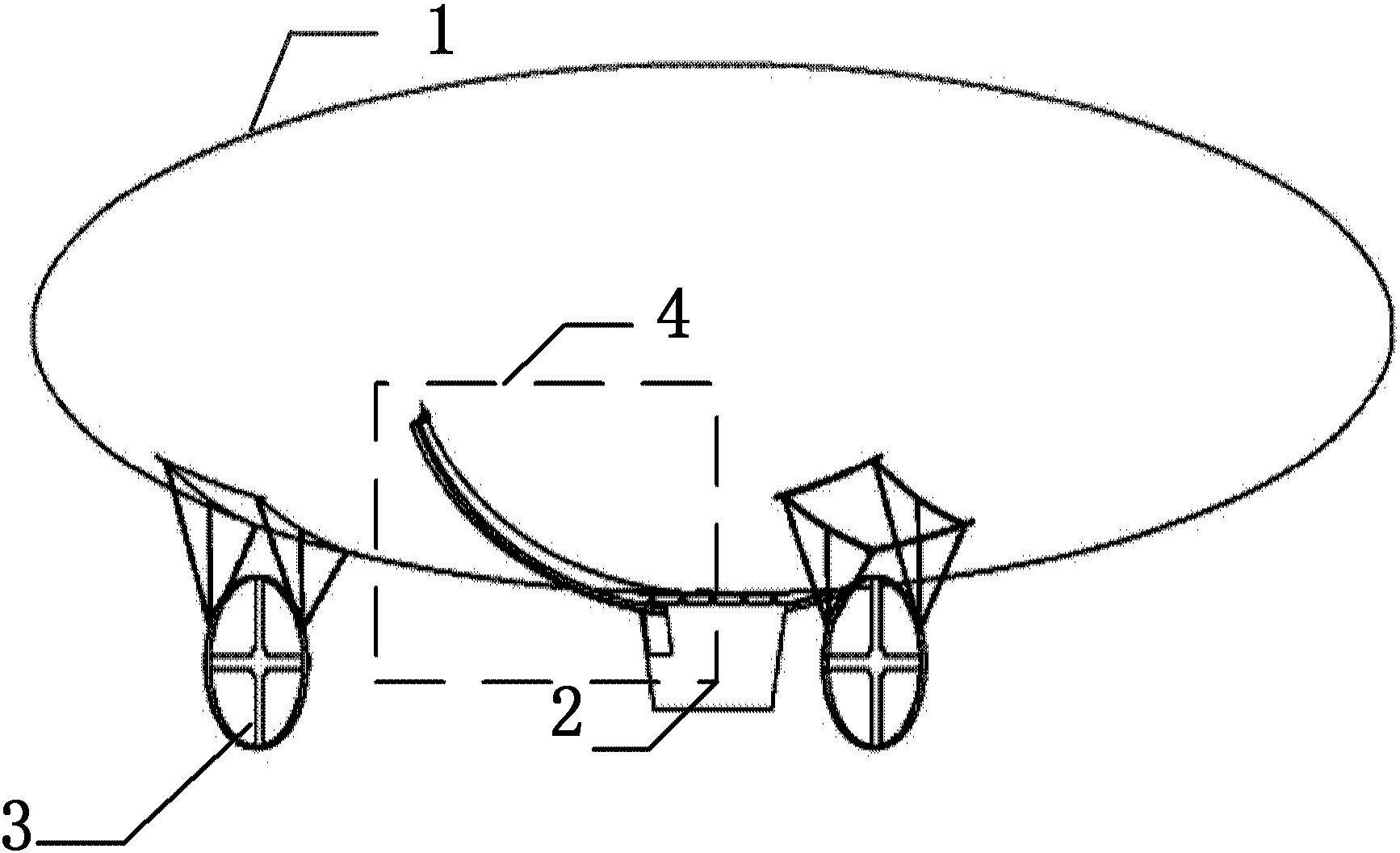
1)在平流层飞艇低空机动返场的同时,布置降落装置进行降落准备,将安全回收平台布置至预定位置,并展开降落缓冲网。如图2所示,降落装置主体为布有充气式缓冲拉网的大面积柔性平台。如图3所示,该回收平台由四根支柱支起一张降落缓冲拉网,该缓冲网上布置有降落缓冲材料(如充气拉网等)与锚固绳索。
2)在飞艇飞至降落装置上空5~50m高度时,关闭低空推进装置,调整飞艇姿态使其与安全回收平台平行,关闭调姿装置,实施快速放气,使飞艇迅速降落至降落缓冲网上。然后,继续放气,同时利用锚固绳索将飞艇与缓冲拉网固定。降落完成后,工作人员对飞艇各部件进行分解回收。
3)回收完成后进行转场运输,对其进行全面检测与维护,准备进行下次飞行任务。
本发明的优点是:
1)本平流层飞艇回收方案可实现飞艇的定点安全返场回收,易于实现,可保证飞艇部件100%完好回收;可显著提高回收方案的可靠性、安全性与飞艇的复用能力,显著降低飞艇的使用成本;
2)基于本回收方案所设计的平流层飞艇,配备高低空两套推进系统,无需额外添加调速与变桨矩机构,即可适应高低空飞行工况,增加了其动力系统可靠性;
3)本方案中预测降落技术使得飞艇无需在急风区进行大动力机动飞行,降低了其动力系统和能源系统的设计约束,降低了急风区进行动力飞行所带来的风险,提高了飞艇的安全性;同时低空机动飞行方案可实现预测误差修正,保证了本方案在现有的气象预测条件下的实施条件;
4)本方案中基于平流层软式飞艇所设计的降落装置,可有效降低飞艇降落过程中由于侧风所引起的飞行事故,提高回收安全性;且可大型柔性回收平台可以大幅度降低未知风险,提高回收效率。
附图说明
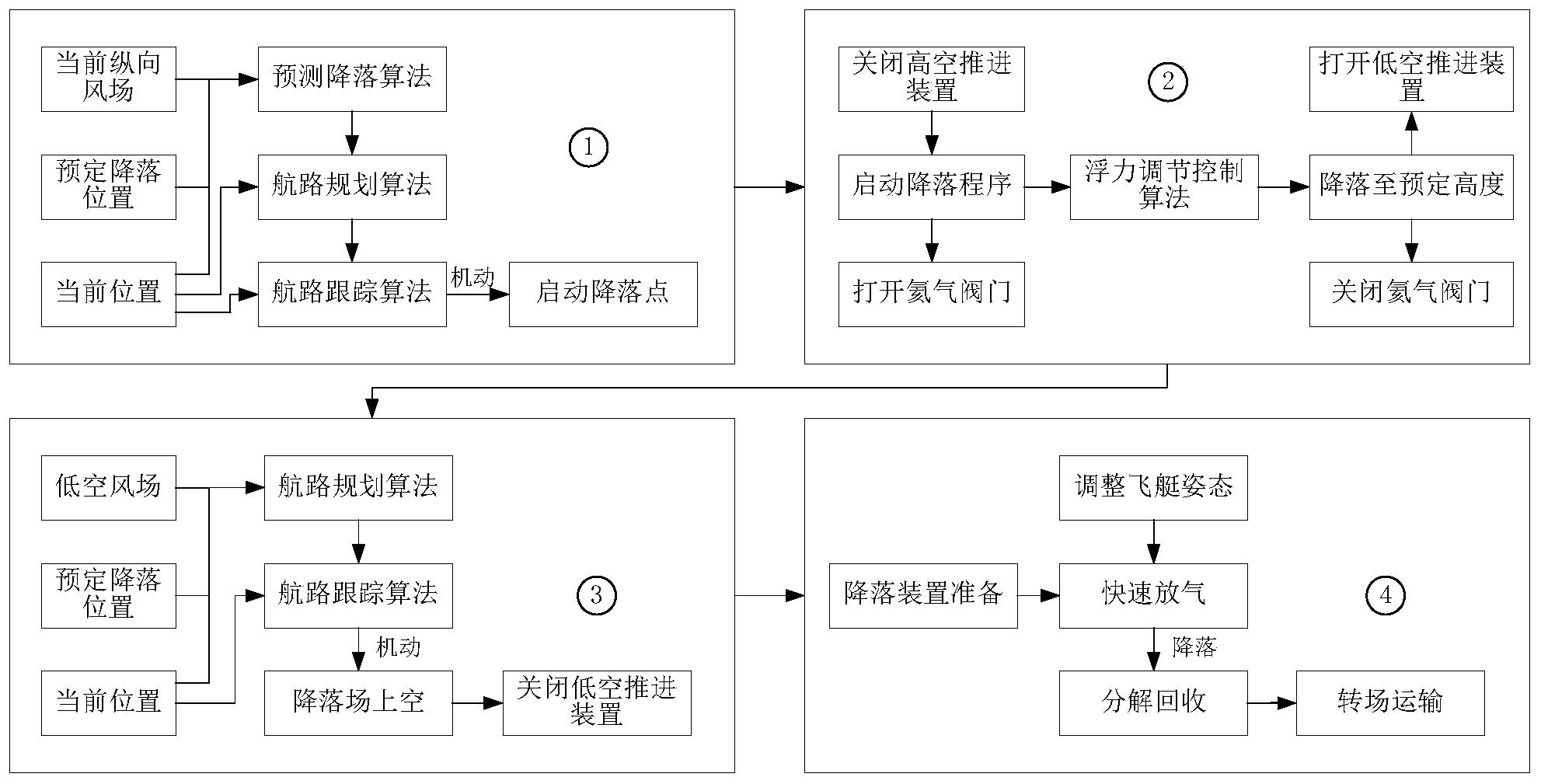
图1平流层飞艇定点安全回收方案流程图。
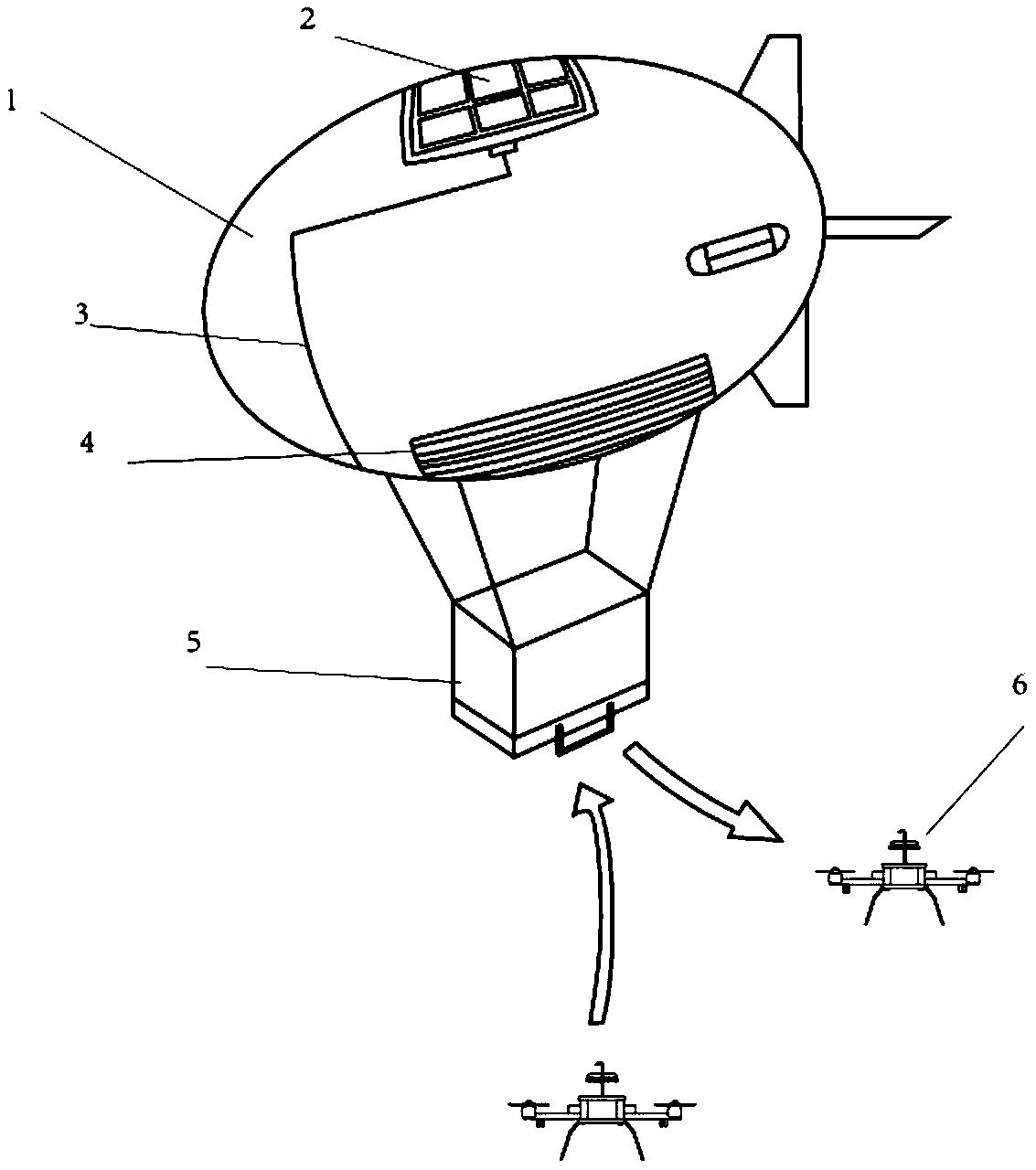
图2平流层飞艇定点安全回收方案示意图。
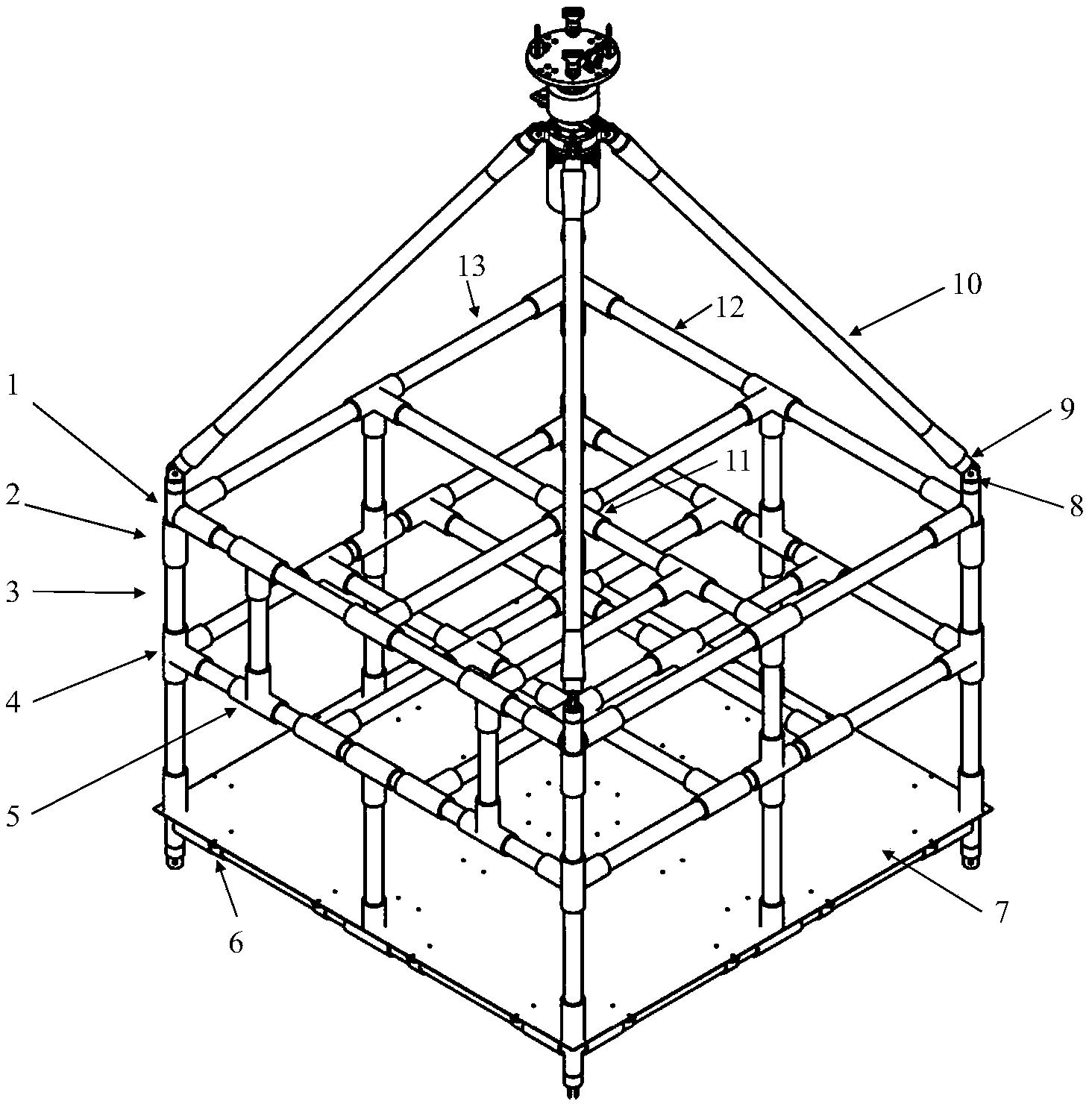
图3平流层飞艇定点回收降落装置方案示意图。
图中标号含义如下:
1.代表步骤一;2.代表步骤二;3.代表步骤三;4.代表步骤四;
5.安全回收平台;6.测控中心;7.放气中的飞艇8.降落缓冲网;
9.充气拉网;10.缓冲网支柱。
具体实施方式
下面结合附图对本发明做进一步的说明。图1、2分别为本方案的实施流程框图与示意图,图3为本方案中降落装置设计示意图。
本发明中平流层飞艇定点成形返场回收策略实施流程如图1、2所示。本发明共分四个步骤进行实施,其具体步骤如下:
步骤一:机动至预测降落启动点。
如图1中①所示,平流层飞艇根据当前风场和预定降落区域位置利用预测降落算法计算高空开始实施降落程序时所需的初始位置。将飞艇视作完全随风飘动,在气象部门提供的不同高度梯度风场下进行自由落体并随风飘动,如飞艇从20km启动降落,降落至2km高度大约需要40min,通过对不同高度风速进行积分,可得到其水平面内的位置偏移;初始位置为下一步中的启动降落点位置。其中,该当前风场由气象保障部门按照固定时间间隔与高度间隔提供,该数据为在飞艇降落时间段内的风场预测数据,数据类型为在该时段内不同高度梯度的水平风速,且当前风场为预测数据;该预定降落区域位置为定点回收场固定位置,是预先设定好的;该当前位置为飞艇由组合导航设备所测得的当前实际位置;该预测降落算法由飞艇六自由度运动学与动力学模型、热力学模型与外部风场构成,主要用于估算飞艇在维持形状的前提下依靠重力无动力穿越高空至低空区间的水平面内位置变化。
如图1中①所示,平流层飞艇利用航路规划算法(可参考论文Direct trajectoryoptimization based on a mapped Chebyshev pseudospectral method)规划由飞艇当前位置飞往高空启动降落时的预定位置的平面航路。其中,启动降落点位置由上步预测降落落点反推得到。飞艇启动降落点设为原点,由预测降落算法算得飞艇降落至低空2km高度位置偏移为东向20km,南向10km,则将飞艇启动降落点想西调节20km,向北调节10km。由于高空空域较为自由,因此所规划航路一般为直线航路。
如图1中①所示,平流层飞艇利用航路跟踪算法跟踪上述所规划航路,飞行至预定的高空(为飞艇的巡航高度,一般为18~30km高度)启动降落点。该航路跟踪算法(可参考论文:Trajectory tracking control for underactuated stratospheric airship)由三部分构成:制导律、姿态跟踪算法、控制分配算法,制导律根据当前位置和期望位置差解算期望姿态,姿态跟踪算法计算跟踪该期望姿态所需的虚拟控制量,控制分配算法将上述虚拟控制量解算至飞艇实际控制量,如电机转速等;
步骤二:成形穿越急流区
如图1中②所示,在平流层飞艇飞至预定的高空启动降落位置后,由测控中心6控制飞艇关闭高空推进装置,同时打开氦气阀门,启动降落程序。其中,该氦气阀门的控制操作依据飞艇内外压差动态调节。
如图1中②所示,在平流层飞艇维持气动外形无动力降落过程,需要通过调节浮力控制系统,对其囊体压差与降落速度进行调节。压差传感器测量囊体内外压差,通过囊体阀门和副气囊等压差调节装置,利用反馈调节原理,调节囊体压差使飞艇在所设计的安全压差范围内维持其流线外形。该浮力控制系统由飞艇的构型决定,如单囊体飞艇为氦气主阀门;组合囊体为主副气囊阀门,分别调节氦气囊与空气囊压强。
如图1中②所示,在平流层飞艇降落至预定低空高度时,调节囊体压差至合理范围后关闭氦气阀门,同时打开低空推进装置。囊体压差与囊体材料相关,合理判据为使飞艇在所设计的安全压差范围内维持其流线外形。
步骤三:低空机动返场
如图1中③所示,在平流层飞艇抵达预定低空(如2km)高度时,由于预测模型与预报风场存在的误差,飞艇位置会偏离降落装置上空。飞艇根据当前低空风场、当前位置与降落装置位置,利用航路跟踪算法规划低空机动返场三维航路。
如图1中③所示,平流层飞艇用三维航路跟踪算法跟踪前述所规划三维航路使飞艇机动至降落装置上空。该航路跟踪算法由三部分构成:制导律、姿态跟踪算法、控制分配算法,制导律根据当前位置和期望位置差解算期望姿态,姿态跟踪算法计算跟踪该期望姿态所需的虚拟控制量,控制分配算法将上述虚拟控制量解算至飞艇实际控制量,如电机转速等;
如图1中③所示,在平流层飞艇抵达降落装置上空5~50m高度时,关闭低空推进装置。
步骤四:降落回收。
如图1中④与图2所示,在平流层飞艇低空机动返场的同时,布置降落装置进行降落准备,将安全回收平台5布置至预定位置,并展开降落缓冲网7。如图2所示,降落装置主体为布有充气式缓冲拉网的大面积柔性平台。如图3所示,该回收平台由四根缓冲网支柱10支起一张降落缓冲拉网,该缓冲网上布置有降落缓冲材料(如充气拉网9等)与锚固绳索。
如图1中④与图2所示,在飞艇飞至降落装置上空5~50m高度时,关闭主推螺旋桨,调整飞艇姿态使其与安全回收平台5平行,关闭调姿装置,实施快速放气,使放气中的飞艇7迅速降落至降落缓冲网7上。然后,继续放气,同时利用锚固绳索将飞艇与缓冲网固定。降落完成后,工作人员对飞艇各部件进行分解回收。
回收完成后进行转场运输,对其进行全面检测与维护,准备进行下次飞行任务。
一种平流层飞艇定点安全回收方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0