

IPC分类号 : G05D1/08,G05D1/10,H04N7/18,H04B7/185,B64B1/00,B64D47/08







专利摘要
本实用新型提供了一种生态保护红线区移动巡查系统,包括远程监控端、移动巡查端、应用服务器和数据库服务器,所述应用服务器与远程监控端和移动巡查端通过无线通讯网络连接,所述数据库服务器与应用服务器连接;所述移动巡查端包括无人飞行器和由所述无人飞行器所搭载的定位模块和摄像模块。所述无人飞行器利用气囊以提供浮力,利用多旋翼装置以实现飞行姿态调整,所述无人飞行器不仅具有无人飞艇续航能力强、悬停性能优异的特点,又具有多旋翼无人飞行器的易于调整控制的性能,所述无人飞行器能满足保护区巡查的要求。所述无人飞行器可替代巡查人员抵达地势险峻的区域开展巡查工作,可提高巡查效率和巡查覆盖面积。
权利要求
1.一种生态保护红线区移动巡查系统,其特征在于,包括远程监控端、移动巡查端、应用服务器和数据库服务器,所述应用服务器与远程监控端和移动巡查端通过无线通讯网络连接,所述数据库服务器与应用服务器连接;
所述移动巡查端包括无人飞行器和由所述无人飞行器所搭载的定位模块和摄像模块,所述定位模块用于采集无人飞行器的实时位置数据;所述无人飞行器包括用于产生空气浮力的气囊、用于提供前进动力的主推动器、用于飞行姿态调整的多旋翼装置以及通讯装置和控制器;所述通讯装置用于将定位模块采集的位置数据和摄像模块拍摄的影像数据传输给应用服务器;所述控制器用于根据远程监控端的控制信息以控制无人飞行器的飞行姿态和飞行轨迹;
所述数据库服务器用于存储所述位置数据和影像数据;所述远程监控端用于从应用服务器查询所述位置数据和影像数据,并向无人飞行器的控制器发送控制信息。
2.根据权利要求1所述生态保护红线区移动巡查系统,其特征在于,还包括客户机,所述客户机通过局域网同时连接所述应用服务器和数据库服务器,所述客户机用于中转所述位置数据和影像数据。
3.根据权利要求1所述生态保护红线区移动巡查系统,其特征在于,所述多旋翼装置为四旋翼装置,四个旋翼分别设置于所述气囊的前侧、左侧、右侧和后侧。
4.根据权利要求1所述生态保护红线区移动巡查系统,其特征在于,所述定位模块为GPS定位器或北斗卫星定位器,所述摄像模块为照相机,所述照相机通过航拍云台搭载于所述气囊的下侧。
5.根据权利要求1所述生态保护红线区移动巡查系统,其特征在于,所述气囊内填充的气体为氦气。
说明书
技术领域
本实用新型涉及地理信息技术领域和无人飞行器领域,特别涉及一种生态保护红线区移动巡查系统。
背景技术
生态保护红线的实质是生态环境安全的底线,通过建立生态保护红线区,目的是建立最为严格的生态保护制度,对生态功能保障、环境质量安全和自然资源利用等方面提出更高的监管要求,从而促进人口资源环境相均衡、经济社会生态效益相统一。
生态保护红线区的巡查工作主要包括对卫片违法图斑的取证调查和对林地形状面积的定期跟踪测量等。现有的巡查方式主要是通过人工携带GIS数据采集装置前往保护区内进行野外巡查。由于自然保护区内局部区域地势险峻,给巡查工作造成极大的阻力,难以保证保护区的全面巡查覆盖。
实用新型内容
本实用新型的目的在于基于地理信息系统技术(GIS)和飞行器技术提供一种生态保护红线区移动巡查系统,利用所述巡查系统可提高巡查效率和巡查覆盖面积,利于迅速且全面地发现和揭露生态破坏违法行为。
为了实现上述目的,本实用新型提供以下技术方案:一种生态保护红线区移动巡查系统,包括远程监控端、移动巡查端、应用服务器和数据库服务器,所述应用服务器与远程监控端和移动巡查端通过无线通讯网络连接,所述数据库服务器与应用服务器连接;
所述移动巡查端包括无人飞行器和由所述无人飞行器所搭载的定位模块和摄像模块,所述定位模块用于采集无人飞行器的实时位置数据;所述无人飞行器包括用于产生空气浮力的气囊、用于提供前进动力的主推动器、用于飞行姿态调整的多旋翼装置以及通讯装置和控制器;所述通讯装置用于将定位模块采集的位置数据和摄像模块拍摄的影像数据传输给应用服务器;所述控制器用于根据远程监控端的控制信息以控制无人飞行器的飞行姿态和飞行轨迹;
所述数据库服务器用于存储所述位置数据和影像数据;所述远程监控端用于从应用服务器查询所述位置数据和影像数据,并向无人飞行器的控制器发送控制信息。
上述技术方案中的无人飞行器可替代巡查人员抵达地势险峻的区域开展巡查工作,以提高巡查效率和巡查覆盖面积。考虑到自然保护区需巡查的面积较大,需要无人飞行器具有优异的续航能力,且位置数据采集期间需要无人飞行器具有优异稳定的悬停性能,所以在本技术方案中采用气囊以提供浮力,多旋翼装置仅用于飞行姿态调整,所述无人飞行器不仅具有无人飞艇的续航能力强、悬停性能优异的特点,又具有多旋翼无人飞行器的易于调整控制的性能。使用时,通过控制无人飞行器围绕林地边缘或卫片违法图斑边缘飞行,可采集林地或卫片违法图斑边缘的多个位置数据,应用服务器可根据所述多个位置数据获得林地或卫片违法图斑的形状面积信息;通过摄像模块可对违法用地进行摄像取证,同时便于远程监控端观察无人飞行器的飞行状态。
进一步地,所述生态保护红线区移动巡查系统还包括客户机,所述客户机通过局域网同时连接所述应用服务器和数据库服务器,所述客户机用于中转所述位置数据和影像数据。所述客户机作为维护修改位置数据和影像数据的工作站,可提高位置数据和影像数据的传输效率,减轻数据库服务器与应用服务器的工作负荷,提高整体系统的运行速度。
优选的,所述多旋翼装置为四旋翼装置,四个旋翼分别设置于所述气囊的前侧、左侧、右侧和后侧。
优选的,所述定位模块为GPS定位器或北斗卫星定位器,所述摄像模块为照相机,所述照相机通过航拍云台搭载于所述气囊的下侧。
优选的,所述气囊内填充的气体为氦气。氦气不可燃,化学性质不活泼,作为填充气体更加安全。
与现有技术相比,本实用新型所述生态保护红线区移动巡查系统具有以下有益效果:
1、通过定位模块采集林地边缘和卫片违法图斑边缘各点的位置数据,通过应用服务器可计算出林地和卫片违法图斑的占地形状和面积,通过摄像模块可对违法用地进行摄像取证。
2、所述无人飞行器可替代巡查人员抵达地势险峻的区域开展巡查工作,可提高巡查效率和巡查覆盖面积。
3、所述无人飞行器利用气囊以提供浮力,而多旋翼装置仅用于飞行姿态调整,所述无人飞行器不仅具有无人飞艇续航能力强、悬停性能优异的特点,又具有多旋翼无人飞行器的易于调整控制的性能,所述无人飞行器能满足保护区巡查的要求。
附图说明
为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简要介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关附图。
图1所示为实施例1所述生态保护红线区移动巡查系统的整体框架图。
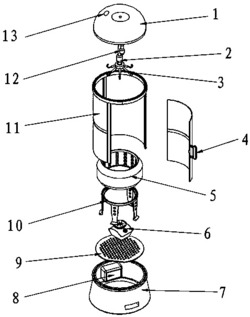
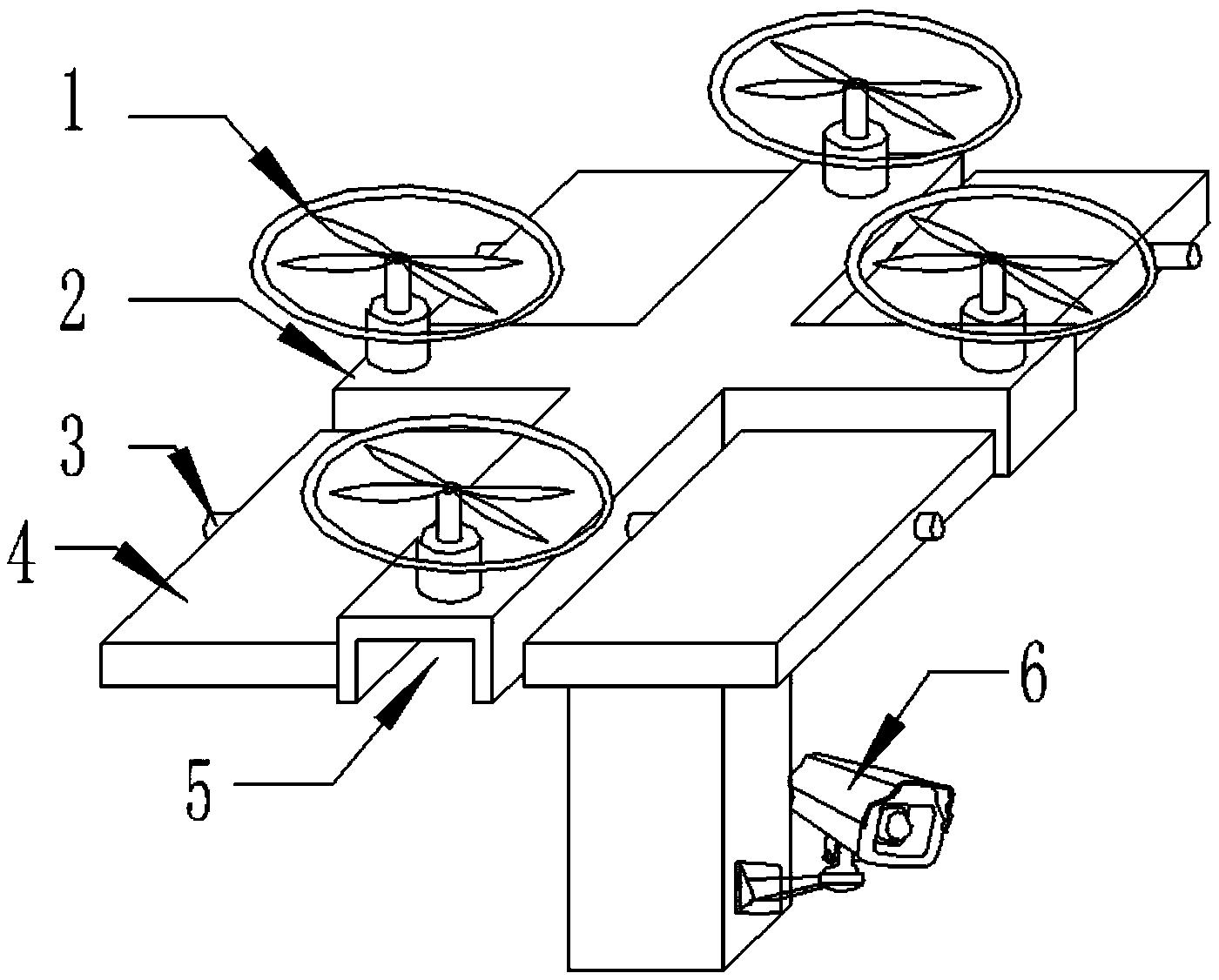
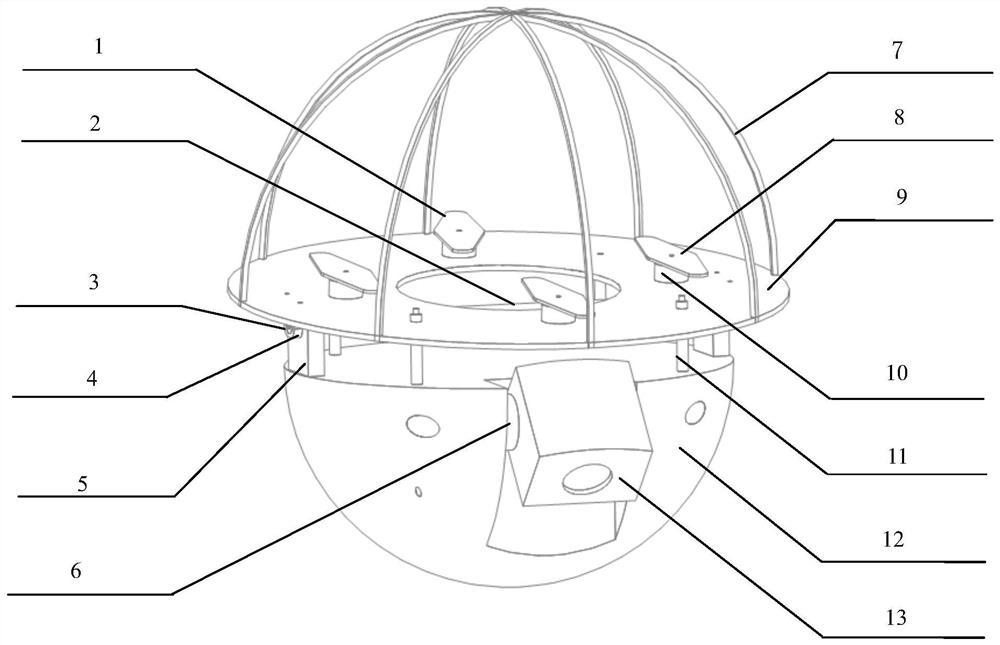
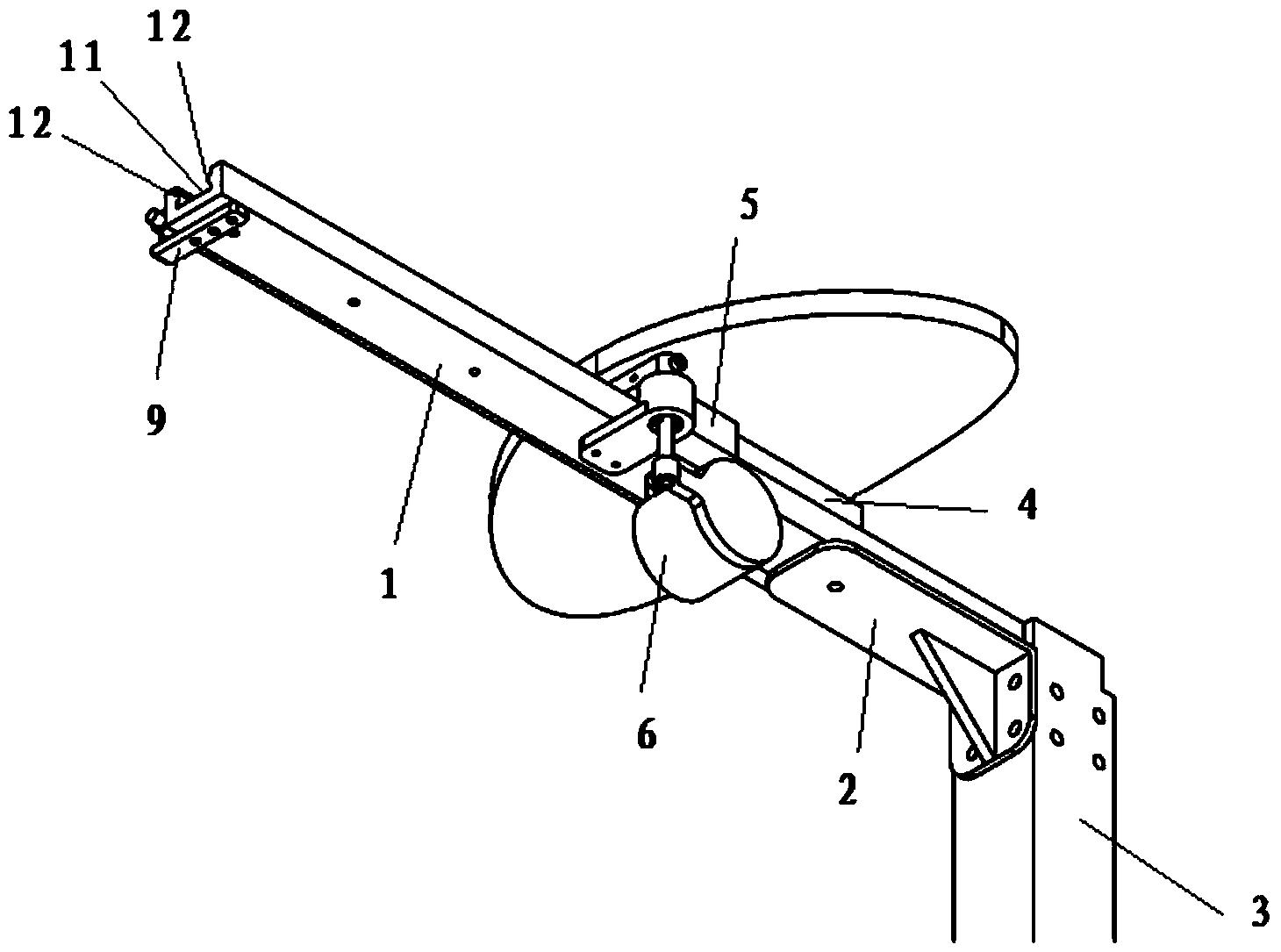
图2所示为本实用新型所述无人飞行器的结构示意图。
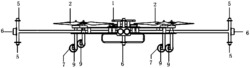
图3所示为本实用新型所述无人飞行器的仰视图。
图4所示为本实用新型所述无人飞行器处于平衡状态时的原理示意图。
图5所示为本实用新型所述无人飞行器俯仰运动的原理示意图。
图6所示为本实用新型所述无人飞行器滚转运动的原理示意图。
图7所示为本实用新型所述无人飞行器偏航运动的原理示意图。
图8所示为本实用新型所述无人飞行器侧向运动的原理示意图。
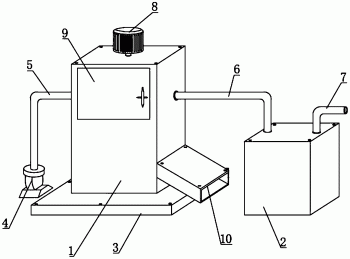
图9所示为实施例2所述生态保护红线区移动巡查系统的整体框架图。
图中标号说明:
10-远程监控端;20-移动巡查端;21-定位模块;22-摄像模块;23-气囊;24-主推动器;25-多旋翼装置;2501-第一旋翼;2502-第二旋翼;2503-第三旋翼;2504-第四旋翼;30-应用服务器;40-数据库服务器;50-客户机。
具体实施方式
下面将结合本实用新型实施例中附图,对本实用新型实施例中的技术方案进行清楚完整的描述。应当理解,此处所描述的具体实施例仅仅用于解释本实用新型,并不用于限定本实用新型。基于本实用新型的实施例,本领域技术人员在没有创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型的保护范围。
实施例1:
请参阅图1至图8,本实施例提供了一种生态保护红线区移动巡查系统,所述巡查系统包括远程监控端10、移动巡查端20、应用服务器30和数据库服务器40,所述应用服务器30与远程监控端10和移动巡查端20通过无线通讯网络连接,所述数据库服务器40与应用服务器30连接。
所述移动巡查端20包括无人飞行器和由所述无人飞行器所搭载的定位模块21和摄像模块22,所述定位模块21用于采集无人飞行器的实时位置数据。作为举例,所述定位模块21可选用GPS定位器或北斗卫星定位器,所述摄像模块22可选用照相机,所述照相机通过航拍云台安装与所述无人飞行器下方。
所述无人飞行器包括用于产生空气浮力的气囊23、用于提供前进动力的主推动器24和用于飞行姿态调整的多旋翼装置25。所述气囊23中填充有密度低于空气密度的气体,考虑到所述无人飞行器用于生态保护红线区巡查,所述填充气体宜选用无燃爆危险的气体,避免引起山火事故,在本实施例中,所述填充气体优选为氦气。所述无人飞行器还包括通讯装置和控制器,所述通讯装置用于将定位模块21采集的位置数据和摄像模块22拍摄的影像数据传输给应用服务器30;所述控制器用于根据远程监控端10的控制信息以控制无人飞行器的飞行姿态和飞行轨迹。
由于所述无人飞行器采用气囊23以提供浮力,多旋翼装置25仅用于飞行姿态调整,所述无人飞行器不仅具有无人飞艇的续航能力强、悬停性能优异的特点,又具有多旋翼无人飞行器的易于调整控制的性能。优异的续航性能使所述无人飞行器能应用于大面积的保护区巡查,优异的悬停性能利于定位模块21采集位置数据。利用所述无人飞行器代替巡查人员开展巡查工作,可减轻巡查人员的工作负荷,并且所述无人飞行器还可以抵达巡查人员难以前往的险峻区域,提高了巡查系统的巡查覆盖面积。
将上述生态保护红线区移动巡查系统应用于巡查工作中时,摄像模块22拍摄的影像数据通过通讯装置被传输至应用服务器30,并被数据库服务器40存储,远程监控端10通过访问应用服务器30监控无人飞行器的飞行状态,并通过应用服务器30向无人飞行器的控制器发送控制信息。无人飞行器飞抵林地或卫片违法图斑区域时,围绕林地边缘或卫片违法图斑边缘飞行,可采集林地或卫片违法图斑边缘的多个位置数据,通讯装置将所述位置数据传送至应用服务器30,并由数据库服务器40存储,应用服务器30可根据所述多个位置数据获得林地或卫片违法图斑的形状面积信息,通过摄像模块22可对违法用地进行摄像取证。
作为一种可实施方式的举例,在本实施例中,所述多旋翼装置25可选用四旋翼装置,四个旋翼分别设置于所述气囊23的前侧、左侧、右侧和后侧。四个旋翼分别为前侧的第一旋翼2501,左侧的第二旋翼2502,后侧的第三旋翼2503和右侧的第四旋翼2504。
请参阅图4所示,第一旋翼2501与第三旋翼2503顺时针旋转,第二旋翼2502与第四旋翼2504逆时针旋转,且四个旋翼的转速相等,可平衡多旋翼装置25对无人飞行器的反扭矩,使无人飞行器平衡不水平旋转。
请参阅图5所示,为了实现俯仰运动,第一旋翼2501转速上升,第三旋翼2503转速下降,第二旋翼2502和第四旋翼2504的转速不变,为了不因为旋翼转速的改变而引起无人飞行器的整体扭矩及总拉力改变,第一旋翼2501和第三旋翼2503转速改变量的大小应相等,由于第一旋翼2501的升力上升,第三旋翼2503的升力下降,产生的不平衡力矩使无人飞行器绕Y轴旋转。同理,当第一旋翼2501转速下降,第三旋翼2503转速上升,无人飞行器便绕Y轴反向旋转,实现无人飞行器的俯仰运动。
请参阅图6所示,为了实现滚转运动,与俯仰运动原理相同,改变第二旋翼2502和第四旋翼2504的转速,保持第一旋翼2501和第三旋翼2503的转速不变,则可使无人飞行器绕X轴正向或反向旋转,实现无人飞行器的滚转运动。
请参阅图7所示,为了实现偏航运动,可借助旋翼产生反向扭矩实现,旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响可使四个旋翼中的第一旋翼2501与第三旋翼2503顺时针旋转,第二旋翼2502与第四旋翼2504逆时针旋转。反扭矩的大小旋翼转速有关,当四个旋翼转速相同时,四个旋翼产生的反扭矩相互平衡,无人飞行器不发生转动;当四个旋翼转速不完全相同时,不平衡的反扭矩会引起无人飞行器水平转动。当第一旋翼2501和第三旋翼2503的转速上升,第二旋翼2502和第四旋翼2504的转速下降时,第一旋翼2501和第三旋翼2503对无人飞行器的反扭矩大于第二旋翼2502和第四旋翼2504对无人飞行器的反扭矩,无人飞行器便在富余反扭矩的作用下绕Z轴转动,实现无人飞行器的偏航运动,转向与第一旋翼2501、第三旋翼2503的转向相反。
请参阅图8所示,为了实现侧向运动,可增加第四旋翼2504转速,使拉力增大,相应减小第二旋翼2502转速,使拉力减小,同时保持其他两个旋翼转速不变,反力距仍然保持平衡,无人飞行器首先发生一定程度的倾斜,从而使螺旋桨的拉力产生水平分力,因此可以实现无人飞行器的向左飞行,同理,当增加第二旋翼2502转速,使拉力增大,相应减小第四旋翼2504转速,使拉力减小,同时保持其他两个旋翼转速不变,可以实现无人飞行器的向右飞行。
实施例2:
请参阅图9,本实施例提供了一种生态保护红线区移动巡查系统,所述巡查系统包括了实施例1中所述的所有技术特征。此外,在本实施例中,所述巡查系统还包括客户机50,所述客户机50通过局域网同时连接所述应用服务器30和数据库服务器40。所述客户机50作为修改和维护数据的工作站,用于中转所述位置数据和影像数据。
在实施例1中,所述位置数据和影像数据通过应用服务器30传送给数据库服务器40,数据传输速率较低,且应用服务器30和数据库服务器40的工作负荷较大。在本实施例中,所述位置数据和影像数据通过客户机50传送给数据库服务器40,客户机50作为修改和维护数据的工作站,可提高数据的传输效率,且能分担应用服务器30和数据库服务器40的工作负荷,提高整个巡查系统的运行速度。
以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员,在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应该涵盖在本实用新型的保护范围内。
一种生态保护红线区移动巡查系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0