








专利摘要
本发明属于微型机器人技术领域,具体为点光源驱动的微型机器人。由取向碳纳米管作为光热转换界面,和聚二甲基硅氧烷制备的柔性、透明基底组装而成;当控制光斑照射在光热转换界面上时,碳纳米管结构内部发生光热转换,产生的热量沿其垂直取向结构传导至微型机器人整体所漂浮的液面,根据马伦格尼效应,与光热转换界面相邻、被加热的液面表面张力急剧降低,与周围未被加热的液面形成表面张力差,从而对于微型机器人整体产生不对称的推力,驱动微型机器人在液面上的运动。本发明具有较高的环境适应性和高可控性,通过设置不同的光驱动响应界面分布和点光源运动轨迹,可根据实际应用场景需要获得运动模式不同的微型无线远程驱动系统。
权利要求
1.一种点光源驱动的微型机器人,其特征在于,该微型机器人由具有高吸光度、光热转化效率的取向碳纳米管作为光热转换界面,和聚二甲基硅氧烷制备的柔性、透明基底组装而成;其光驱动的原理如下:当控制光斑照射在光热转换界面上时,碳纳米管结构内部发生光热转换,产生的热量沿其垂直取向结构传导至微型机器人整体所漂浮的液面,根据马伦格尼效应,与光热转换界面相邻、被加热的液面表面张力急剧降低,与周围未被加热的液面形成表面张力差,从而对于微型机器人整体产生不对称的推力,驱动微型机器人在液面上的运动;
其驱动方式具体如下:将点光源光斑照射在微型机器人的光热转换界面,通过调节点光源照射光响应层及取向碳纳米管薄膜的位置,使微型机器人光热转换界面对应的不同位置产生表面张力梯度,形成推力,实现各种运动轨迹;通过调节点光源的照射强度,控制微型机器人通过光热效应产生推力驱动力的大小,进而实现速度的调控;通过调配点光源,以及光响应界面即取向碳纳米管薄膜与透明弹性基底的组成结构方式,可实现根据实际使用场景的需要达到稳定可控的运动方式与轨迹。
2.根据权利要求1所述的点光源驱动的微型机器人,其特征在于,所述点光源的波长为400-700nm,功率密度10-20W/cm
3.一种点光源驱动的微型机器人的制备方法,其特征在于,具体步骤如下:
(1)制备取向碳纳米管阵列:
采用化学气相沉积法合成垂直取向的可纺多壁碳纳米管阵列;
(2)制备取向碳纳米管吸光材料:
准备长为4-8mm、宽为8-10mm、厚度为0.05-0.2mm的透明石英片,作为基底;将步骤(1)制备的可纺碳纳米管阵列,从碳纳米管阵列一侧牵引宽度为3-7mm的碳纳米管薄膜,交替堆叠在石英片上,交叠层数为20-50层,得到厚度为200-1000μm的取向碳纳米管薄膜,其取向方向与牵引方向一致并垂直于石英片的长边;
(3)制备基于取向碳纳米管的光热转换界面:
在石英片/取向碳纳米管薄膜复合片层四周滴加10-100微升乙醇,使取向碳纳米管薄膜与石英片紧密贴合,50-80℃加热1-5分钟,使乙醇部分挥干;用刀片沿石英片、取向碳纳米管薄膜复合片层轮廓裁下,转移至表面皿中室温干燥1-2小时,得到基于取向碳纳米管的光热转化界面;
(4)制备光驱动微型机器人的透明基底:
将商用聚二甲基硅氧烷的两种交联前体交联剂A和交联剂B以质量比为9:1到10:1的比例混合,搅拌,注入长宽均为4-8mm,高为2-4mm的长方体状聚四氟乙烯浇铸模具中,真空条件下排除体系内气泡2-4小时;将装有混合交联剂的模具从真空体系中取出,在温度为60-90℃的环境下加热2-3小时,得到密度为1-1.2g/cm
(5)制备光驱动微型机器人:
将步骤(3)中所得光热转换界面的石英片面用α-氰基丙烯酸乙酯胶水贴附在步骤(4)中所得长方体状透明基底的尾部,其中,光热转换界面的碳纳米管取向方向垂直于整个块状微型机器人的底面,得到能稳定漂浮于水面的光驱动微型机器人。
说明书
技术领域
本发明属于微型机器人技术领域,具体涉及微型机器人及其制备方法。
背景技术
微型机器人因其在狭小空间或微观尺度进行可控运动、完成特定任务的应用潜力,近年来吸引了学术界与工业界的广泛关注。在众多为微型机器人的供能体系中,光驱动机制因其传输不需要介质、光源开关易实现而成为可行性最高、最适宜精确控制微型机器人运动的手段之一。光热效应是一种高效的光能驱动机制,其原理为通过光热转换材料将特定位置输入的光能转换为热能,利用产生的热能在微型机器人所漂浮的液面产生热致表面张力梯度,形成传质效应,推动微型机器人在气/液界面的运动。
一系列基于光热效应驱动机制,通过合成光热转换材料并与高分子基底复合在气/液界面上实现有效运动的工作已经取得了一定进展。然而,目前所采用的光热转换材料受限于材料微观结构,无法实现定向传热,这意味着输入体系的光能不能直接被传导至液面,形成驱动微型机器人的推力。另外,现有光热转换材料无法定向传热的特点也导致了光驱动微型机器人在液面所产表面张力梯度的低控制性,这种低控制性极大的影响了光驱动微型机器人定点推力的产生,限制了光驱动微型机器人的控制精确性,降低了整个驱动体系的能量转化效率和实际操作应用价值。
发明内容
本发明的目的在于提供一种具备多种运动形式、高度可控的点光源驱动的微型机器人及其制备方法。
本发明提供的点光源驱动的微型机器人,采用由点状光源驱动、控制的取向碳纳米管薄膜作为光热转换界面,该光热转换界面具有较高的环境相容性和光热转换效率,在强光照射下能快速完成光热转换,并沿着其垂直于液面的纳米取向结构将热传导到液面,与其相邻、被加热的液面表面张力急剧降低,与周围未被加热液面产生表面张力差,在表面液层上产生传质效应,在不引入任何化学介质的情况下驱动漂浮在液面上的微型机器人。
具体来说,本发明提供的点光源驱动的微型机器人,由具有高吸光度、光热转化效率的取向碳纳米管作为光热转换界面,和聚二甲基硅氧烷制备的柔性、透明基底组装而成。其光驱动的原理如下:当控制光斑照射在光热转换界面上时,碳纳米管结构内部发生光热转换,产生的热量沿其垂直取向结构传导至微型机器人整体所漂浮的液面,根据马伦格尼效应,与光热转换界面相邻、被加热的液面表面张力急剧降低,与周围未被加热的液面形成表面张力差,从而对于微型机器人整体产生不对称的推力,驱动微型机器人在液面上的运动。
本发明提出的点光源驱动的微型机器人,其驱动方式具体如下:将点光源照射在微型机器人的光热转换界面,通过调节点光源照射光响应层及取向碳纳米管薄膜的位置,使微型机器人光热转换界面对应的不同位置产生表面张力梯度,形成推力,实现各种运动轨迹(如图3);通过调节点光源的照射强度,控制微型机器人通过光热效应产生推力驱动力的大小,进而实现速度的调控;通过调配点光源,以及光响应界面即取向碳纳米管薄膜与透明弹性基底的组成结构方式,可实现根据实际使用场景的需要达到稳定可控的运动方式与轨迹。
本发明中,所述点光源波长为400-700nm,功率密度10-20W/cm
本发明提出的点光源驱动的微型机器人,可通过改变聚二甲基硅氧烷柔性透明基底的形状设计,以及取向碳纳米管光热转换界面的排布方式,可得到光驱动风车等多形式的光驱动形式的微型机器人。例如可以实现液面物体运输、速度可调节的光驱动齿轮等。
本发明提供的上述点光源驱动的微型机器人的制备方法,具体步骤如下:
(1)制备取向碳纳米管阵列:
采用化学气相沉积法合成垂直取向的可纺多壁碳纳米管阵列;其中,催化剂使用Fe(1-2 nm)/Al2O3(8-12 nm),碳源为乙烯,气相载体为氩气和氢气的混合气体,化学气相沉积得到可纺的碳纳米管阵列;
(2)制备取向碳纳米管吸光材料:
准备长为4-8mm、宽为8-10mm、厚度为0.05-0.2mm的透明石英片作为基底;将步骤(1)制备的可纺碳纳米管阵列,用刀片从碳纳米管阵列一侧牵引宽度为3-7mm的碳纳米管薄膜,交替堆叠在石英片上,交叠层数为20-50层,得到厚度为200-1000μm的取向碳纳米管薄膜,其取向方向与牵引方向一致并垂直于石英片的长边;
(3)制备基于取向碳纳米管的光热转换界面:
在石英片/取向碳纳米管薄膜复合片层四周滴加10-100微升乙醇,使取向碳纳米管薄膜与石英片紧密贴合,50-80℃加热1-5分钟,使乙醇部分挥干;用刀片沿石英片、取向碳纳米管薄膜复合片层轮廓裁下,转移至表面皿中室温干燥1-2小时,得到基于取向碳纳米管的光热转化界面;
(4)制备光驱动微型机器人的透明基底:
将商用聚二甲基硅氧烷的两种交联前体交联剂A和交联剂B以质量比为9:1到10:1的比例混合,搅拌,注入长宽均为4-8mm,高为2-4mm的长方体状聚四氟乙烯浇铸模具中,真空条件下排除体系内气泡2-4小时;将装有混合交联剂的模具从真空体系中取出,在温度为60-90℃的环境下加热2-3小时,得到密度为1-1.2g/cm
(5)制备光驱动微型机器人:
将步骤(3)中所得光热转换界面的石英片面用α-氰基丙烯酸乙酯胶水贴附在步骤(4)中所得长方体状透明基底的尾部,其中,光热转换界面的碳纳米管取向方向垂直于整个块状微型机器人的底面,得到能稳定漂浮于水面的光驱动微型机器人。
上述制备的光驱动微型机器人制动体系,放置于水面上,将波长为400-700nm,功率密度10-20W/cm
由本方法得到的光驱动微型机器人,在可控光斑照射下,能在水面上形成轨迹可控的运动,得益于作为光热转换界面的取向碳纳米管薄膜优异的光热转换效率,在该体系中,一层厚800nm左右的光热转换界面能在水面上驱动质量为其一万倍的微型机器人。该驱动体系依据光热效应,通过水面上由温差导致的表面张力梯度进行驱动,不涉及任何化学反应也无需引入任何化学介质,具有极高的应用价值与环境适应性。并可通过设置不同的光驱动响应界面分布和点光源运动轨迹,可根据实际应用场景需要获得运动模式不同的微型无线远程驱动系统。
附图说明
图1为基于取向碳纳米管的光热转换界面制备示意图与相应的扫描电子显微镜图片。从左至右为:合成取向碳纳米管阵列、从单侧牵引取向碳纳米管得到薄膜平铺至石英片表面、基于取向碳纳米管的光热转换薄膜。
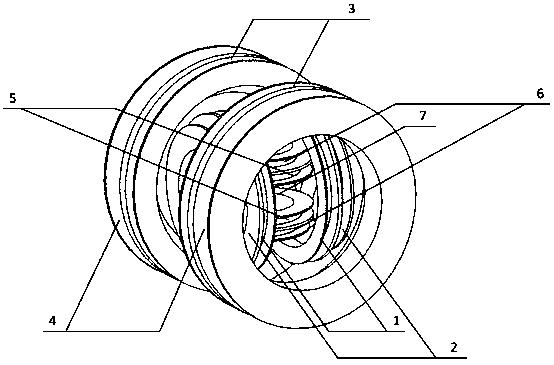
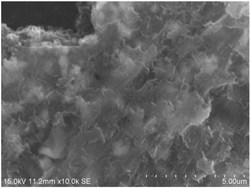
图2为光驱动微型机器人的光学照片与驱动过程视频截图。其中,a为光驱动机器人的实物光学照片,前部透明基底为块状聚二甲基硅氧烷,尾部深色部分为基于取向碳纳米管的光热转换界面;b为光热转换界面的扫描电子显微镜图片,右上角插图为该界面的接触角测试图像;c为光驱动微型机器人的典型运动过程,0 s时在图像左侧打开光源照射光热转换界面(上),在2.5 s时关闭光源,在此过程中,该微型机器人直线运动距离超过4 cm(下)。
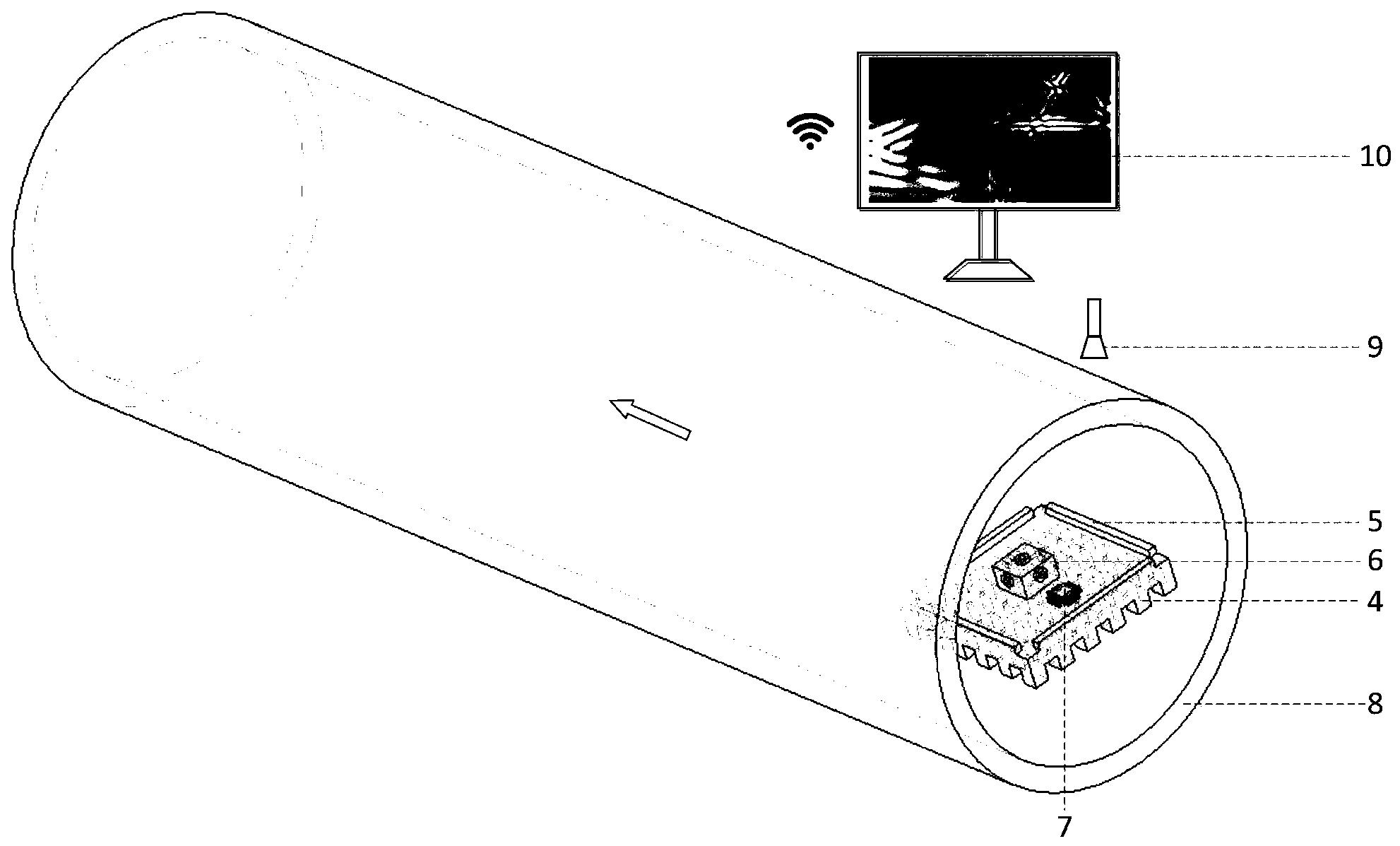
图3为光驱动微型机器人多方向运动示意图、光热转换界面红外成像图片及二维运动轨迹坐标图。其中,第一行为光源照射位点与光驱动微型机器人运动方向示意图,第二行为光热转换界面与水面热力学分布俯视图,第三行为四种运动方向的二维运动轨迹示意图。
具体实施方式
实施例1
(1)制备取向碳纳米管吸光材料:准备长为4mm,宽为8mm,厚度为0.05mm的透明石英片作为基底;通过化学气相沉积法制备可纺碳纳米管阵列,用刀片从碳纳米管阵列一侧牵引宽度为3mm的碳纳米管薄膜,交叠20层在石英片上,得到厚度为200μm的取向碳纳米管薄膜,其取向方向与牵引方向一致并垂直于石英片的长边;
(2)制备基于取向碳纳米管的光热转换界面:在石英片/取向碳纳米管复合片层四周滴加10微升乙醇,使取向碳纳米管薄膜与石英片紧密贴合,50℃加热1分钟,使乙醇部分挥干;用刀片沿石英片、取向碳纳米管复合片层轮廓裁下,转移至表面皿中室温干燥1小时,得到基于取向碳纳米管的光热转化界面;
(3)制备光驱动微型机器人的透明基底:将商用聚二甲基硅氧烷的两种交联前体交联剂A(主要成分是聚二甲基硅氧烷预聚物即二甲基硅氧烷,含有微量铂催化剂)和交联剂B(主要成分是带乙烯基侧链的预聚物)以质量比为9:1的比例混合,搅拌,注入长宽均为4mm,高为2mm的长方体状聚四氟乙烯浇铸模具中,真空条件下排除体系内气泡2小时;将装有混合交联剂的模具从真空体系中取出,在温度为60℃的环境下加热2小时,得到密度为1g/cm
(4)制备光驱动微型机器人驱动体系:将步骤(2)中所得光热转换界面的石英片面用α-氰基丙烯酸乙酯胶水贴附在步骤(3)中所得长方体状透明基底的尾部,其中,光热转换界面的碳纳米管取向方向垂直于整个块状微型机器人的底面,得到能稳定漂浮于水面的光驱动微型机器人;
(5)制备直线运动的光驱动微型机器人驱动体系:将波长为400nm,功率密度10W/cm
实施例2
(1)制备取向碳纳米管吸光材料:准备长为6mm,宽为9mm,厚度为0.1mm的透明石英片作为基底;通过化学气相沉积法制备可纺碳纳米管阵列,用刀片从碳纳米管阵列一侧牵引宽度为5mm的碳纳米管薄膜,交叠30层在石英片上,得到厚度为500μm的取向碳纳米管薄膜,其取向方向与牵引方向一致并垂直于石英片的长边;
(2)制备基于取向碳纳米管的光热转换界面:在石英片/取向碳纳米管复合片层四周滴加50微升乙醇,使取向碳纳米管薄膜与石英片紧密贴合,60℃加热3分钟,使乙醇部分挥干;用刀片沿石英片、取向碳纳米管复合片层轮廓裁下,转移至表面皿中室温干燥1.5小时,得到基于取向碳纳米管的光热转化界面;
(3)制备光驱动微型机器人的透明基底:将商用聚二甲基硅氧烷的两种交联前体交联剂A(主要成分是聚二甲基硅氧烷预聚物即二甲基硅氧烷,含有微量铂催化剂)和交联剂B(主要成分是带乙烯基侧链的预聚物)以质量比为9.5:1的比例混合,搅拌,注入长宽均为4mm,高为3mm的长方体状聚四氟乙烯浇铸模具中,真空条件下排除体系内气泡3小时;将装有混合交联剂的模具从真空体系中取出,在温度为80℃的环境下加热2.5小时,得到密度为1.15g/cm
(4)制备光驱动微型机器人驱动体系:
将步骤(2)中所得光热转换界面的石英片面用α-氰基丙烯酸乙酯胶水贴附在步骤(3)中所得长方体状透明基底的尾部,其中,光热转换界面的碳纳米管取向方向垂直于整个块状微型机器人的底面,得到能稳定漂浮于水面的光驱动微型机器人;
(5)制备左转向运动的光驱动微型机器人驱动体系:将波长为420nm,功率密度20W/cm
实施例3
(1)制备取向碳纳米管吸光材料:准备长为8mm,宽为10mm,厚度为0.2mm的透明石英片作为基底;通过化学气相沉积法制备可纺碳纳米管阵列,用刀片从碳纳米管阵列一侧牵引宽度为7mm的碳纳米管薄膜,交叠50层在石英片上,得到厚度为1000μm的取向碳纳米管薄膜,其取向方向与牵引方向一致并垂直于石英片的长边;
(2)制备基于取向碳纳米管的光热转换界面:在石英片/取向碳纳米管复合片层四周滴加100微升乙醇,使取向碳纳米管薄膜与石英片紧密贴合,80℃加热5分钟,使乙醇部分挥干;用刀片沿石英片、取向碳纳米管复合片层轮廓裁下,转移至表面皿中室温干燥2小时,得到基于取向碳纳米管的光热转化界面;
(3)制备光驱动微型机器人的透明基底:将商用聚二甲基硅氧烷的两种交联前体交联剂A(主要成分是聚二甲基硅氧烷预聚物即二甲基硅氧烷,含有微量铂催化剂)和交联剂B(主要成分是带乙烯基侧链的预聚物)以质量比为10:1的比例混合,搅拌,注入长宽均为8mm,高为4mm的长方体状聚四氟乙烯浇铸模具中,真空条件下排除体系内气泡4小时;将装有混合交联剂的模具从真空体系中取出,在温度为90℃的环境下加热3小时,得到密度为1.2g/cm
(4)制备光驱动微型机器人驱动体系:将步骤(2)中所得光热转换界面的石英片面用α-氰基丙烯酸乙酯胶水贴附在步骤(3)中所得长方体状透明基底的尾部,其中,光热转换界面的碳纳米管取向方向垂直于整个块状微型机器人的底面,得到能稳定漂浮于水面的光驱动微型机器人;
(5)制备右转向运动的光驱动微型机器人驱动体系:将波长为430 nm,功率密度18W/cm
一种点光源驱动的微型机器人及其制备方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0