








专利摘要
本发明公开了一种端口平行张合的SU‑8柔顺电热驱动微夹持器,该微夹持器由驱动部分和夹持部分组成。其中,驱动部分由驱动器梁(1)、驱动器梭(2)和锚区域组成,锚区域由对称的锚区域a(4)和锚区域b(4’)组成;夹持部分由Z型梁结构连杆(3)以及左右两边完全对称的夹持器机构组成;夹持部分通过驱动器梭(2)和驱动部分固定连接。本微夹持器端口能够实现平行张合运动,能够更加容易地进行微小物体、细胞的操作;驱动器和夹持机构部分为整体结构,采用SU‑8整体加工,提高了夹持端口的位移;本微夹持器结构简单紧凑,易于微小化加工,提高了操作精度和可靠性。
权利要求
1.一种端口平行张合的SU-8柔顺电热驱动微夹持器,其特征在于:该微夹持器由驱动部分和夹持部分组成;其中,驱动部分由驱动器梁(1)、驱动器梭(2)和锚区域组成,锚区域由对称的锚区域a(4)和锚区域b(4’)组成;夹持部分由Z型梁结构连杆(3)以及左右两边完全对称的夹持器机构组成;夹持部分通过驱动器梭(2)和驱动部分固定连接;
驱动器梭(2)分为上半部分和下半部分,驱动器梭(2)的下半部分通过驱动器梁(1)和锚区域固定连接,构成微夹持器的驱动部分;驱动器梭(2)的上半部分通过Z型梁结构连杆(3)与夹持器机构固定连接,夹持器机构固定连接在锚区域上,构成微夹持器的夹持部分;
驱动器梁(1)为阵列布置的形式,阵列布置的驱动器梁(1)连同驱动器梭(2)和锚区域组成该微夹持器的驱动部分;该整体结构用SU-8制成后,在驱动部分上下两面均溅射上铜层;阵列布置的驱动器梁(1)两端固定在驱动器梭(2)与锚区域a(4)之间以及驱动器梭(2)和锚区域b(4’)之间;
夹持器结构为左右对称的柔顺机构,夹持器左右臂自锚区域(4、4’)分别连接一个矩形柔顺机构;该矩形柔顺机构由夹持器矩形结构连杆、动平台以及四个柔顺铰链构成;
锚区域a(4)与第一柔顺铰链a(5)和第一柔顺铰链b(6)固定连接;第一柔顺铰链a(5)与第一夹持器矩形结构连杆a(7)固定连接,第一夹持器矩形结构连杆a(7)另一端与第一柔顺铰链c(9)固定连接;第一柔顺铰链b(6)与第一夹持器矩形结构连杆b(8)固定连接,第一夹持器矩形结构连杆b(8)另一端与第一柔顺铰链d(10)固定连接;第一柔顺铰链c(9)以及第一柔顺铰链d(10)均与第一夹持器矩形结构动平台(11)固定连接;
锚区域b(4’)与第二柔顺铰链a(5’)和第二柔顺铰链b(6’)固定连接;第二柔顺铰链a(5’)与第二夹持器矩形结构连杆a(7’)固定连接,第二夹持器矩形结构连杆a(7’)另一端与第二柔顺铰链c(9’)固定连接;第二柔顺铰链b(6’)与第二夹持器矩形结构连杆b(8’)固定连接,第二夹持器矩形结构连杆b(8’)另一端与第二柔顺铰链d(10’)固定连接;第二柔顺铰链c(9’)以及第二柔顺铰链d(10’)均与第二夹持器矩形结构动平台(11’)固定连接;
Z型梁结构连杆(3)沿驱动器梭(2)与第一夹持器矩形结构动平台(11)及第二夹持器矩形结构动平台(11’)对称连接;第一夹持器矩形结构动平台(11)与第一夹持臂前端(12)固定连接,第一夹持臂前端(12)的另一端与第一夹持器末端钳口(13)固定连接;第二夹持器矩形结构动平台(11’)与第二夹持臂前端(12’)固定连接,第二夹持臂前端(12’)的另一端与第二夹持器末端钳口(13’)固定连接。
2.根据权利要求1所述的一种端口平行张合的SU-8柔顺电热驱动微夹持器,其特征在于:驱动器梁(1)推动驱动器梭(2),驱动器梭(2)推动Z型梁结构连杆(3),Z型梁结构连杆(3)推动第一夹持器矩形结构动平台(11)及第二夹持器矩形结构动平台(11’),从而将驱动器的运动传递到夹持器左右臂的运动,形成第一夹持器末端钳口(13)及第二夹持器末端钳口(13’)的夹持动作;
在锚区域a(4)和锚区域b(4’)两端加上电压后,由于锚区域a(4)、锚区域b(4’)、驱动器梁(1)以及驱动器梭(2)下半部分上下两面被溅射上了铜层,有电流流过驱动器梁(1);驱动器梁(1)产生焦耳热,导致驱动器梁(1)热膨胀,进而产生位移和力,推动驱动器梭(2);驱动器梭(2)的运动由Z型梁结构连杆传递到第一夹持器矩形结构动平台(11)及第二夹持器矩形结构动平台(11’)上,第一夹持器矩形结构动平台(11)及第二夹持器矩形结构动平台(11’)又将运动传递到第一夹持器末端钳口(13)及第二夹持器末端钳口(13’)上,产生夹持动作;该微夹持器安装在宏观机械臂的末端,用于产生夹持动作以操作微观物体,靠宏观机械臂大范围的运动使微观物体正好位于第一夹持器末端钳口(13)和第二夹持器末端钳口(13’)之间,第一夹持器末端钳口(13)和第二夹持器末端钳口(13’)产生相对的运动以夹持微观物体或相反的运动以释放微观物体。
3.根据权利要求1所述的一种端口平行张合的SU-8柔顺电热驱动微夹持器,其特征在于:柔顺铰链形状为矩形。
4.根据权利要求1所述的一种端口平行张合的SU-8柔顺电热驱动微夹持器,其特征在于:所述驱动器梁(1)为V型梁或Z型梁。
5.根据权利要求1所述的一种端口平行张合的SU-8柔顺电热驱动微夹持器,其特征在于:阵列布置的驱动器梁(1)对数大于1。
说明书
技术领域
本发明属于微机电系统技术领域中的微执行器,可以对微小物体、细胞等操作对象进行操作作业。
背景技术
微操作技术是微机电系统技术领域的重要组成部分,而微夹持器是微操作系统与被操作对象之间(如微小器件、细胞等)的接口,在微操作、微装配中起着关键作用。研究和开发适用于微观物体操作的微夹持器是实现微操作技术由实验迈向应用的关键。
目前,微夹持器结构分为柔顺结构和刚性结构两种形式。刚性夹持器是由夹持器各杆件通过刚性铰链装配而成的结构,其对装配精度要求很高,且难以微小化,从而对高精度操作造成困难。柔顺结构是将刚性铰链连接转化成柔顺铰链,通过柔顺铰链本身材料的变形来产生运动和力的传递,一体式加工,无需装配,易于实现微小化。且由于免去了刚性铰链的装配,具有无摩擦、无需润滑和运动精度高的优势。
微夹持器驱动方式有静电、电磁、压电、形状记忆合金以及电热式。与其他驱动方式相比,电热驱动有形式简单紧凑、易于集成与加工、控制简单和驱动位移和力较大等优势。
根据微机电制造工艺,微驱动器和夹持结构可选用如单晶硅、多晶硅、镍和SU-8光刻胶等多种材料。其中SU-8具有热膨胀系数高杨氏模量低的特点,可以增加驱动位移的同时还能够减小柔顺夹持机构的刚度,从而增加最终夹持位移。Jinkui Chu,Ran Zhang,和Zhaopeng Chen在国际学术期刊《Journal of Micromechanics and Microengineering》的2011年第21期054030页上发表的论文“A novel SU-8electrothermal microgripperbased on the type synthesis of the kinematic chain method and the stiffnessmatrix method”用SU-8胶整体加工电热驱动微夹持器并在驱动部分溅射上铜层以实现驱动,很好地运用到微操作中。
从实际操作过程来看,如果夹持器端口能够实现平行开合运动,则可以更容易有效地夹持微小物体。目前,大多数夹持器在夹持过程中都有转动。MohdNashrul MohdZubir、Bijan Shirinzadeh和Yanling Tian在国际学术期刊《Mechanism and MachineTheory》的2009年第44期第2248~2264页上发表论文“A new design of piezoelectricdriven compliant-based microgripper for micromanipulation”中提出了一种能够实现端口平行张合运动的微夹持器。本发明相比,其由于采用压电驱动器,夹持器本身用线切割加工而成,整体尺寸较大,不能实现更小更微物体的操作(如细胞)。褚金奎、张然、张成、王文静和陈兆鹏发明的“一种钳口平行张合的柔性电热微夹钳”虽然能实现夹持器端口平行操作且也是电热驱动和柔性结构,采用微机电加工工艺,整体尺寸可以较小,但其夹持器结构本身涉及多处复杂的连杆传动结构,整体尺寸若采用SU-8材料加工,其结构的复杂性以及杆件之间极小的间距使得结构无法进一步缩小,高精度加工设备昂贵,因此加工成本成倍提高。另外,由于结构的复杂性,加工失败率也成倍增加;柔性铰链过多使用,造成微操作中的可靠性降低。本发明中,柔顺夹持机构用矩形结构保证夹持端口的平行开合,用简单的Z型梁连接驱动器与夹持臂,实现驱动直线位移向操作夹持动作的转换。更易于用SU-8光刻胶一体化加工,从而进一步提高夹持位移。此外,本发明结构简单,易于加工尺寸更小的微夹持器,从而实现对更小尺寸物体的操作,由于柔顺铰链个数少,夹持器结构简单紧凑,提升了操作可靠性。
发明内容
本发明要解决的技术难题是针对现有技术的不足,提供一种结构简单、新颖,能实现端口平行张合的SU-8电热驱动柔顺夹持器。
为实现上述目的,本发明采用的技术方案是一种端口平行张合的SU-8柔顺电热驱动微夹持器,该微夹持器由驱动部分和夹持部分组成。其中,驱动部分由驱动器梁(1)、驱动器梭(2)和锚区域组成,锚区域由对称的锚区域a(4)和锚区域b(4’)组成;夹持部分由Z型梁结构连杆(3)以及左右两边完全对称的夹持器机构组成;夹持部分通过驱动器梭(2)和驱动部分固定连接。
驱动器梭(2)分为上半部分和下半部分,驱动器梭(2)的下半部分通过驱动器梁(1)和锚区域固定连接,构成微夹持器的驱动部分。驱动器梭(2)的上半部分通过Z型梁结构连杆(3)与夹持器机构固定连接,夹持器机构固定连接在锚区域上,构成微夹持器的夹持部分。
驱动器梁(1)为阵列布置的形式,阵列布置的驱动器梁(1)连同驱动器梭(2)和锚区域组成该微夹持器的驱动部分;该整体结构用SU-8制成后,在驱动部分上下两面均溅射上铜层。阵列布置的驱动器梁(1)两端固定在驱动器梭(2)与锚区域a(4)之间以及驱动器梭(2)和锚区域b(4’)之间。
夹持器结构为左右对称的柔顺机构,夹持器左右臂自锚区域(4、4’)分别连接一个矩形柔顺机构。该矩形柔顺机构由夹持器矩形结构连杆、动平台以及四个柔顺铰链构成。
锚区域a(4)与第一柔顺铰链a(5)和第一柔顺铰链b(6)固定连接。第一柔顺铰链a(5)与第一夹持器矩形结构连杆a(7)固定连接,第一夹持器矩形结构连杆a(7)另一端与第一柔顺铰链c(9)固定连接。第一柔顺铰链b(6)与第一夹持器矩形结构连杆b(8)固定连接,第一夹持器矩形结构连杆b(8)另一端与第一柔顺铰链d(10)固定连接。第一柔顺铰链c(9)以及第一柔顺铰链d(10)均与第一夹持器矩形结构动平台(11)固定连接。
锚区域b(4’)与第二柔顺铰链a(5’)和第二柔顺铰链b(6’)固定连接。第二柔顺铰链a(5’)与第二夹持器矩形结构连杆a(7’)固定连接,第二夹持器矩形结构连杆a(7’)另一端与第二柔顺铰链c(9’)固定连接。第二柔顺铰链b(6’)与第二夹持器矩形结构连杆b(8’)固定连接,第二夹持器矩形结构连杆b(8’)另一端与第二柔顺铰链d(10’)固定连接。第二柔顺铰链c(9’)以及第二柔顺铰链d(10’)均与第二夹持器矩形结构动平台(11’)固定连接。
Z型梁结构连杆(3)沿驱动器梭(2)与第一夹持器矩形结构动平台(11)及第二夹持器矩形结构动平台(11’)对称连接。第一夹持器矩形结构动平台(11)与第一夹持臂前端(12)固定连接,第一夹持臂前端(12)的另一端与第一夹持器末端钳口(13)固定连接。第二夹持器矩形结构动平台(11’)与第二夹持臂前端(12’)固定连接,第二夹持臂前端(12’)的另一端与第二夹持器末端钳口(13’)固定连接。
驱动器梁(1)推动驱动器梭(2),驱动器梭(2)推动Z型梁结构连杆(3),Z型梁结构连杆(3)推动第一夹持器矩形结构动平台(11)及第二夹持器矩形结构动平台(11’),从而将驱动器的运动传递到夹持器左右臂的运动,形成第一夹持器末端钳口(13)及第二夹持器末端钳口(13’)的夹持动作。
在锚区域a(4)和锚区域b(4’)两端加上电压后,由于锚区域a(4)、锚区域b(4’)、驱动器梁(1)以及驱动器梭(2)下半部分上下两面被溅射上了铜层,有电流流过驱动器梁(1)。驱动器梁(1)产生焦耳热,导致驱动器梁(1)热膨胀,进而产生位移和力,推动驱动器梭(2)。驱动器梭(2)的运动由Z型梁结构连杆传递到第一夹持器矩形结构动平台(11)及第二夹持器矩形结构动平台(11’)上,第一夹持器矩形结构动平台(11)及第二夹持器矩形结构动平台(11’)又将运动传递到第一夹持器末端钳口(13)及第二夹持器末端钳口(13’)上,产生夹持动作。该微夹持器安装在宏观机械臂的末端,用于产生夹持动作以操作微观物体,靠宏观机械臂大范围的运动使微观物体正好位于第一夹持器末端钳口(13)和第二夹持器末端钳口(13’)之间,第一夹持器末端钳口(13)和第二夹持器末端钳口(13’)产生相对的运动以夹持微观物体或相反的运动以释放微观物体。
一种端口平行开合的SU-8柔顺电热驱动微夹持器中,柔顺铰链形状为矩形。
所述驱动器梁(1)为V型梁或Z型梁。
一种端口平行开合的SU-8柔顺电热驱动微夹持器中,驱动器部分是V型梁或Z型梁阵列。阵列布置的驱动器梁(1)对数大于1。
与现有技术比较,本发明具有如下有益效果:
1、本微夹持器端口能够实现平行张合运动,能够更加容易地进行微小物体、细胞的操作;
2、驱动器和夹持机构部分为整体结构,采用SU-8整体加工,提高了夹持端口的位移;
3、本微夹持器结构简单紧凑,易于微小化加工,提高了操作精度和可靠性。
附图说明
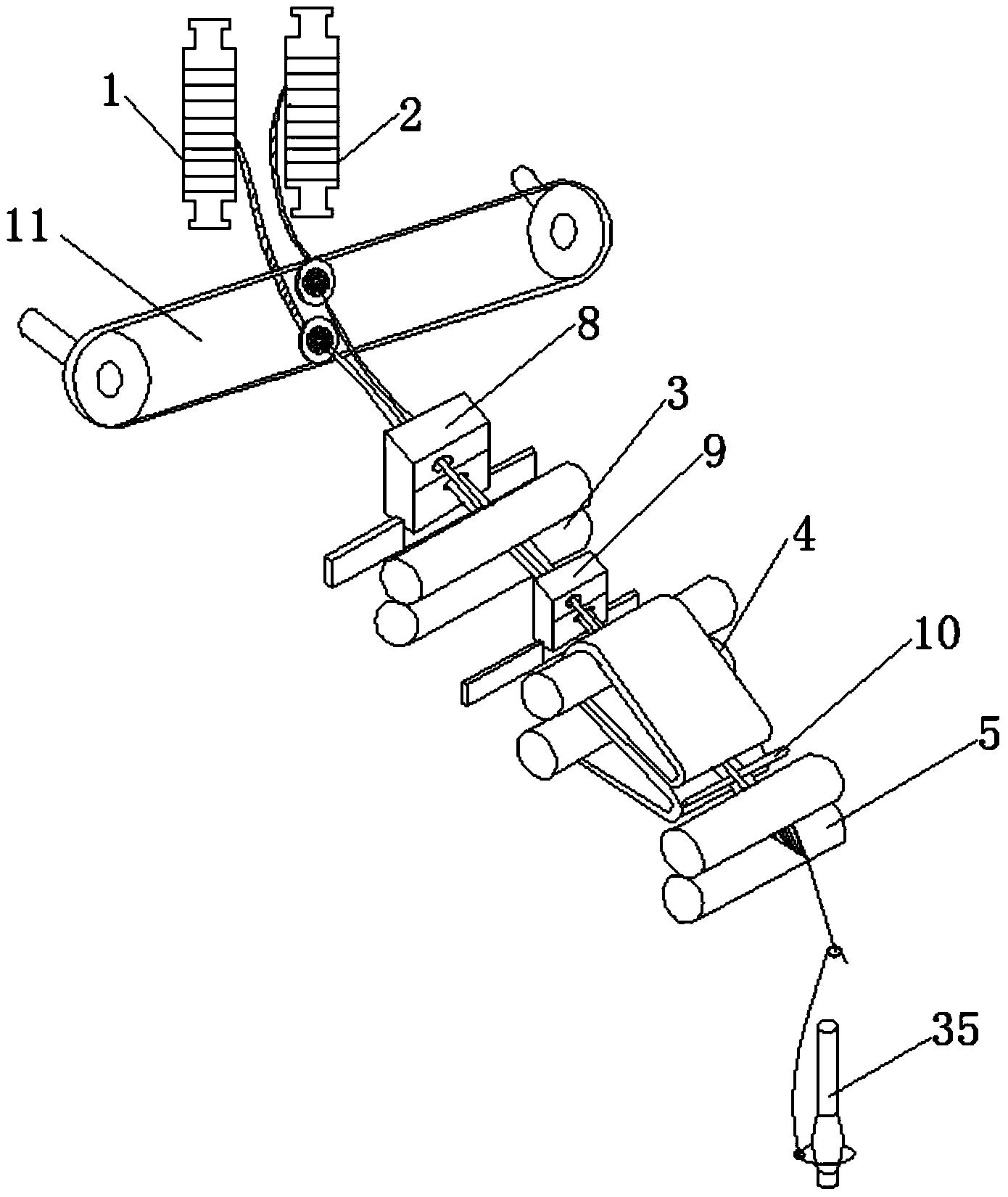
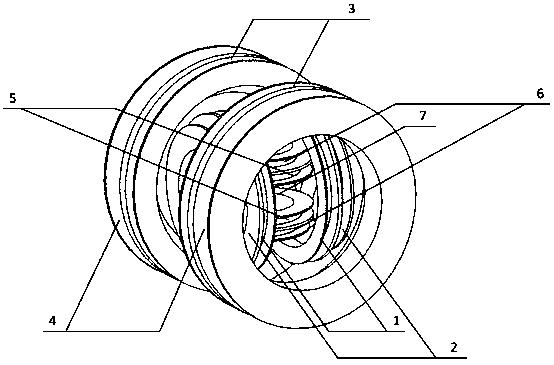
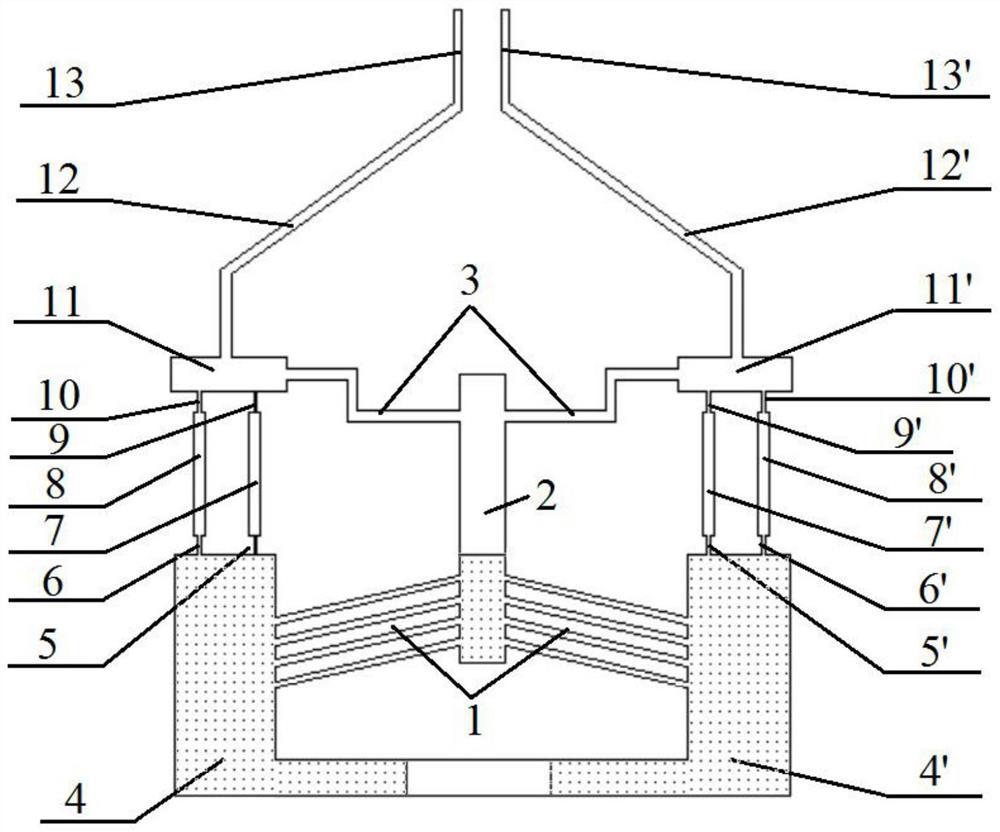
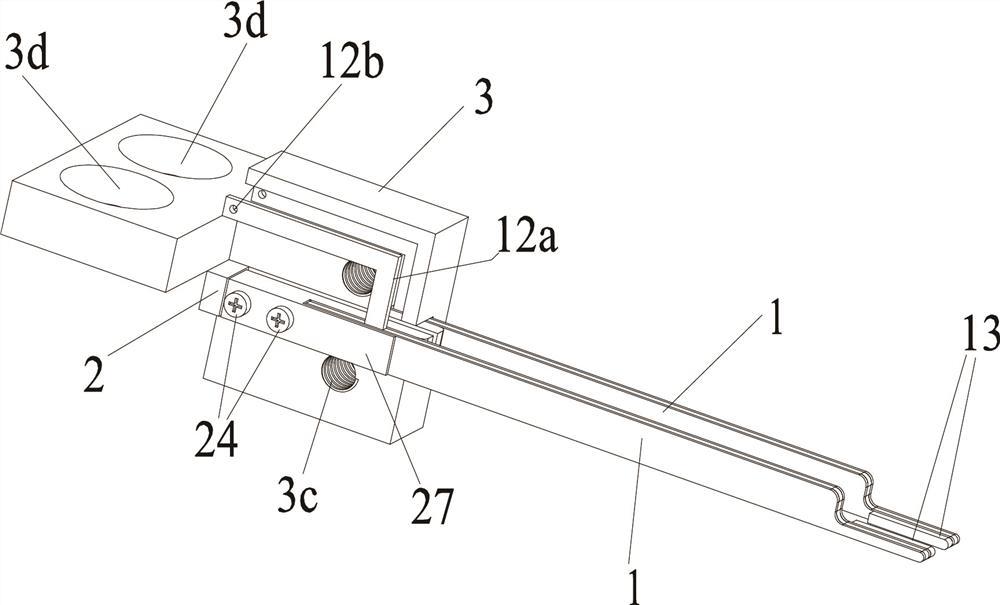
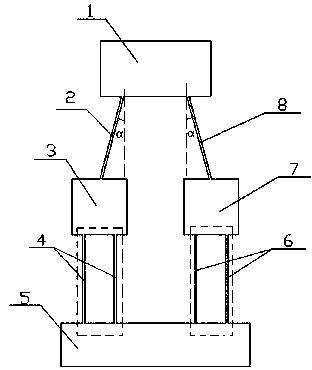
图1是本发明V型梁的柔顺电热驱动微夹持器结构示意图。
图2是本发明Z型梁的柔顺电热驱动微夹持器结构示意图。
图中,1—驱动器梁;2--驱动器梭;3--Z型梁结构连杆;4--锚区域a;5--第一柔顺铰链a;6--第一柔顺铰链b;7--第一夹持器矩形结构连杆a;8--第一夹持器矩形结构连杆b;9--第一柔顺铰链c;10--第一柔顺铰链d;11--第一夹持器矩形结构动平台;12--第一夹持臂前端;13--第一夹持器末端钳口;4’-锚区域b;5’--第二柔顺铰链a;6’--第二柔顺铰链b;7’--第二夹持器矩形结构连杆a;8’--第二夹持器矩形结构连杆b;9’--第二柔顺铰链c;10’--第二柔顺铰链d;11’—第二夹持器矩形结构动平台;12’—第二夹持臂前端;13’—第二夹持器末端钳口。
具体实施方式
一种端口平行张合的SU-8柔顺电热驱动微夹持器,该微夹持器由驱动部分和夹持部分组成。其中,驱动部分由驱动器梁(1)、驱动器梭(2)和锚区域组成,锚区域由对称的锚区域a(4)和锚区域b(4’)组成;夹持部分由Z型梁结构连杆(3)以及左右两边完全对称的夹持器机构组成;夹持部分通过驱动器梭(2)和驱动部分固定连接。
驱动器梭(2)分为上半部分和下半部分,驱动器梭(2)的下半部分通过驱动器梁(1)和锚区域固定连接,构成微夹持器的驱动部分。驱动器梭(2)的上半部分通过Z型梁结构连杆(3)与夹持器机构固定连接,夹持器机构固定连接在锚区域上,构成微夹持器的夹持部分。
驱动器梁(1)为阵列布置的形式,阵列布置的驱动器梁(1)连同驱动器梭(2)和锚区域组成该微夹持器的驱动部分;该整体结构用SU-8制成后,在驱动部分上下两面均溅射上铜层。阵列布置的驱动器梁(1)两端固定在驱动器梭(2)与锚区域a(4)之间以及驱动器梭(2)和锚区域b(4’)之间。
夹持器结构为左右对称的柔顺机构,夹持器左右臂自锚区域(4、4’)分别连接一个矩形柔顺机构。该矩形柔顺机构由夹持器矩形结构连杆、动平台以及四个柔顺铰链构成。
锚区域a(4)与第一柔顺铰链a(5)和第一柔顺铰链b(6)固定连接。第一柔顺铰链a(5)与第一夹持器矩形结构连杆a(7)固定连接,第一夹持器矩形结构连杆a(7)另一端与第一柔顺铰链c(9)固定连接。第一柔顺铰链b(6)与第一夹持器矩形结构连杆b(8)固定连接,第一夹持器矩形结构连杆b(8)另一端与第一柔顺铰链d(10)固定连接。第一柔顺铰链c(9)以及第一柔顺铰链d(10)均与第一夹持器矩形结构动平台(11)固定连接。
锚区域b(4’)与第二柔顺铰链a(5’)和第二柔顺铰链b(6’)固定连接。第二柔顺铰链a(5’)与第二夹持器矩形结构连杆a(7’)固定连接,第二夹持器矩形结构连杆a(7’)另一端与第二柔顺铰链c(9’)固定连接。第二柔顺铰链b(6’)与第二夹持器矩形结构连杆b(8’)固定连接,第二夹持器矩形结构连杆b(8’)另一端与第二柔顺铰链d(10’)固定连接。第二柔顺铰链c(9’)以及第二柔顺铰链d(10’)均与第二夹持器矩形结构动平台(11’)固定连接。
Z型梁结构连杆(3)沿驱动器梭(2)与第一夹持器矩形结构动平台(11)及第二夹持器矩形结构动平台(11’)对称连接。第一夹持器矩形结构动平台(11)与第一夹持臂前端(12)固定连接,第一夹持臂前端(12)的另一端与第一夹持器末端钳口(13)固定连接。第二夹持器矩形结构动平台(11’)与第二夹持臂前端(12’)固定连接,第二夹持臂前端(12’)的另一端与第二夹持器末端钳口(13’)固定连接。
驱动器梁(1)推动驱动器梭(2),驱动器梭(2)推动Z型梁结构连杆(3),Z型梁结构连杆(3)推动第一夹持器矩形结构动平台(11)及第二夹持器矩形结构动平台(11’),从而将驱动器的运动传递到夹持器左右臂的运动,形成第一夹持器末端钳口(13)及第二夹持器末端钳口(13’)的夹持动作。
在锚区域a(4)和锚区域b(4’)两端加上电压后,由于锚区域a(4)、锚区域b(4’)、驱动器梁(1)以及驱动器梭(2)下半部分上下两面被溅射上了铜层,有电流流过驱动器梁(1)。驱动器梁(1)产生焦耳热,导致驱动器梁(1)热膨胀,进而产生位移和力,推动驱动器梭(2)。驱动器梭(2)的运动由Z型梁结构连杆传递到第一夹持器矩形结构动平台(11)及第二夹持器矩形结构动平台(11’)上,第一夹持器矩形结构动平台(11)及第二夹持器矩形结构动平台(11’)又将运动传递到第一夹持器末端钳口(13)及第二夹持器末端钳口(13’)上,产生夹持动作。该微夹持器安装在宏观机械臂的末端,用于产生夹持动作以操作微观物体,靠宏观机械臂大范围的运动使微观物体正好位于第一夹持器末端钳口(13)和第二夹持器末端钳口(13’)之间,第一夹持器末端钳口(13)和第二夹持器末端钳口(13’)产生相对的运动以夹持微观物体或相反的运动以释放微观物体。
一种端口平行开合的SU-8柔顺电热驱动微夹持器中,柔顺铰链形状为矩形。
所述驱动器梁(1)为V型梁或Z型梁。
一种端口平行开合的SU-8柔顺电热驱动微夹持器中,驱动器部分是V型梁或Z型梁阵列。阵列布置的驱动器梁(1)对数大于1。
下面结合附图和技术方案详细叙述本发明的具体实施方式。如附图1或图2所示,在锚区域(4、4’)左右加上电压后,由于锚区域被溅射上了铜层,电流流过驱动器梁阵列(图1是V型梁;图2是Z型梁),产生焦耳热,V型或Z型驱动器梁(1)受热伸长,推动驱动器梭(2),使其产生力和位移。此力和位移通过Z型梁结构连杆(3、3’)传递至左右夹持器矩形结构动平台(11、11’)上,推动夹持器矩形结构动平台(11、11’)平动。由于采用矩形结构,第一夹持器矩形结构连杆a(7)和第一夹持器矩形结构连杆b(8)平行。第二夹持器矩形结构连杆a(7’)和第二夹持器矩形结构连杆b(8’)平行。夹持器矩形结构动平台(11、11’)只能平动,无法转动;夹持器矩形结构动平台(11、11’)的运动通过固定顺序连接的夹持臂前端(12、12’)传递至夹持器末端钳口(13、13’),形成夹持器端口平行开合的运动。矩形结构连杆(7、7’)和(8、8’)通过四个柔顺铰链(5、5’)、(6、6’)、(9、9’)和(10、10’)连接动平台(11、11’)和锚(4、4’),构成矩形柔顺传动结构。柔顺铰链通过自身变形传递力和位移。由于整体驱动部分和夹持机构部分采用左右对称结构,夹持器末端钳口(13、13’)的运动左右对称,形成夹持器端口平行开合的运动,以有效夹持与释放微观物体。
一种端口平行张合的SU-8柔顺电热驱动微夹持器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0