










专利摘要
本实用新型公开了一种三维电磁微机器人无缆驱动装置,包括一对X轴赫姆霍兹线圈、一对X轴麦克斯韦线圈、一对Y轴赫姆霍兹线圈、一对Y轴麦克斯韦线圈、一对Z轴赫姆霍兹线圈和一对Z轴麦克斯韦线圈,上述每对线圈均平行设置,一对X轴赫姆霍兹线圈位于一对X轴麦克斯韦线圈内侧,一对Y轴赫姆霍兹线圈位于一对Y轴麦克斯韦线圈内侧,一对Z轴赫姆霍兹线圈位于一对Z轴麦克斯韦线圈内侧,三对赫姆霍兹线圈轴向方向两两正交,三对麦克斯韦线圈轴向方向两两正交,六对线圈轴向方向共同指向的中间区域为微机器人驱动的工作空间。本实用新型产生的均匀磁场和均匀梯度磁场的值在一定范围内可控可调;可以对用磁性材料制作而成的微机器人进行三维空间的无缆驱动。
权利要求
1.一种三维电磁微机器人无缆驱动装置,包括一对X轴赫姆霍兹线圈、一对X轴麦克斯韦线圈、一对Y轴赫姆霍兹线圈、一对Y轴麦克斯韦线圈、一对Z轴赫姆霍兹线圈和一对Z轴麦克斯韦线圈,其特征在于,上述每对线圈均平行设置,一对X轴赫姆霍兹线圈位于一对X轴麦克斯韦线圈内侧,一对Y轴赫姆霍兹线圈位于一对Y轴麦克斯韦线圈内侧,一对Z轴赫姆霍兹线圈位于一对Z轴麦克斯韦线圈内侧,所述一对Y轴赫姆霍兹线圈、一对Y轴麦克斯韦线圈位于一对X轴赫姆霍兹线圈、一对X轴麦克斯韦线圈外侧,一对Z轴赫姆霍兹线圈和一对Z轴麦克斯韦线圈位于一对X轴赫姆霍兹线圈、一对X轴麦克斯韦线圈内侧,三对赫姆霍兹线圈轴向方向两两正交,三对麦克斯韦线圈轴向方向两两正交,六对线圈轴向方向共同指向的中间区域为微机器人驱动的工作空间。
2.根据权利要求1所述的一种三维电磁微机器人无缆驱动装置,其特征在于,对于每一个轴方向上的赫姆霍兹线圈和麦克斯韦线均圈设计在同一个线圈骨架上。
3.根据权利要求1或2所述的一种三维电磁微机器人无缆驱动装置,其特征在于,每个轴方向上的赫姆霍兹线圈和麦克斯韦线圈的线圈骨架互不干涉,每个线圈骨架留有槽来缠绕导线,制作线圈。
说明书
技术领域
本实用新型涉及一种电磁线圈装置技术领域,尤其涉及一种可以产生有规律的电磁场并可进行人为控制三维电磁微机器人无缆驱动装置。
背景技术
微机器人无缆化操作在生物学、医学、微装配、微纳制造等领域有着极广阔的应用前景,一种方法是通过控制外加磁场来控制磁性材料制作而成的微机器人运动,将能量通过磁场的磁力作用转化为微机器人的动能,从而实现微机器人的无缆驱动。利用外磁场对微机器人进行无缆驱动,目前分析实验较多的是一维或二维驱动系统的设计和研究,而实际微机器人潜在的应用场合往往要求微机器人进行三维空间上的无缆驱动。
实用新型内容
本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种三维电磁微机器人无缆驱动装置。
为了实现上述目的,本实用新型采用了如下技术方案:
一种三维电磁微机器人无缆驱动装置,包括一对X轴赫姆霍兹线圈、一对X轴麦克斯韦线圈、一对Y轴赫姆霍兹线圈、一对Y轴麦克斯韦线圈、一对Z轴赫姆霍兹线圈和一对Z轴麦克斯韦线圈,上述每对线圈均平行设置,一对X轴赫姆霍兹线圈位于一对X轴麦克斯韦线圈内侧,一对Y轴赫姆霍兹线圈位于一对Y轴麦克斯韦线圈内侧,一对Z轴赫姆霍兹线圈位于一对Z轴麦克斯韦线圈内侧,所述一对Y轴赫姆霍兹线圈、一对Y轴麦克斯韦线圈位于一对X轴赫姆霍兹线圈、一对X轴麦克斯韦线圈外侧,一对Z轴赫姆霍兹线圈和一对Z轴麦克斯韦线圈位于一对X轴赫姆霍兹线圈、一对X轴麦克斯韦线圈内侧,三对赫姆霍兹线圈轴向方向两两正交,三对麦克斯韦线圈轴向方向两两正交,六对线圈轴向方向共同指向的中间区域为微机器人驱动的工作空间。
优选的,对于每一个轴方向上的赫姆霍兹线圈和麦克斯韦线均圈设计在同一个线圈骨架上。
优选的,每个轴方向上的赫姆霍兹线圈和麦克斯韦线圈的线圈骨架互不干涉,每个线圈骨架留有槽来缠绕导线,制作线圈。
优选的,六对线圈任意每对线圈可以用一个独立的电流源,也可以用两个独立的电流源来控制通入线圈的电流;对于整个三维电磁驱动装置最少需要六个独立的电流源,最多可用十二个独立的电流源。
优选的,电流源可以采用可编程电流源,通入线圈的电流可以是直流电也可以是交流电。
优选的,当线圈通入直流电时,工作空间产生均匀磁场和均匀梯度的磁场,当线圈通入正余弦电流时可以在工作空间产生旋转磁场。
优选的,通过调整通入各线圈的电流,可以实时控制微机器人在工作空间中不同方向的运动。
优选的,三维电磁微机器人无缆驱动装置产生的磁场可以作为微机器人驱动应用外,也可以作为其他领域提供特定磁场的研究。
本实用新型可以在工作空间沿任一方向产生均匀磁场和均匀梯度磁场;三维电磁微机器人无缆驱动装置产生的均匀磁场和均匀梯度磁场的值在一定范围内可控可调;可以对用磁性材料制作而成的微机器人进行三维空间的无缆驱动;三维无缆磁驱动微机器人具有五个自由度的运动;给三维电磁驱动系统中三对赫姆霍兹线圈通入正余弦电流,可以在工作空间中产生旋转磁场,及产生磁场的磁场强度值保持不变,方向做圆周运动。
附图说明
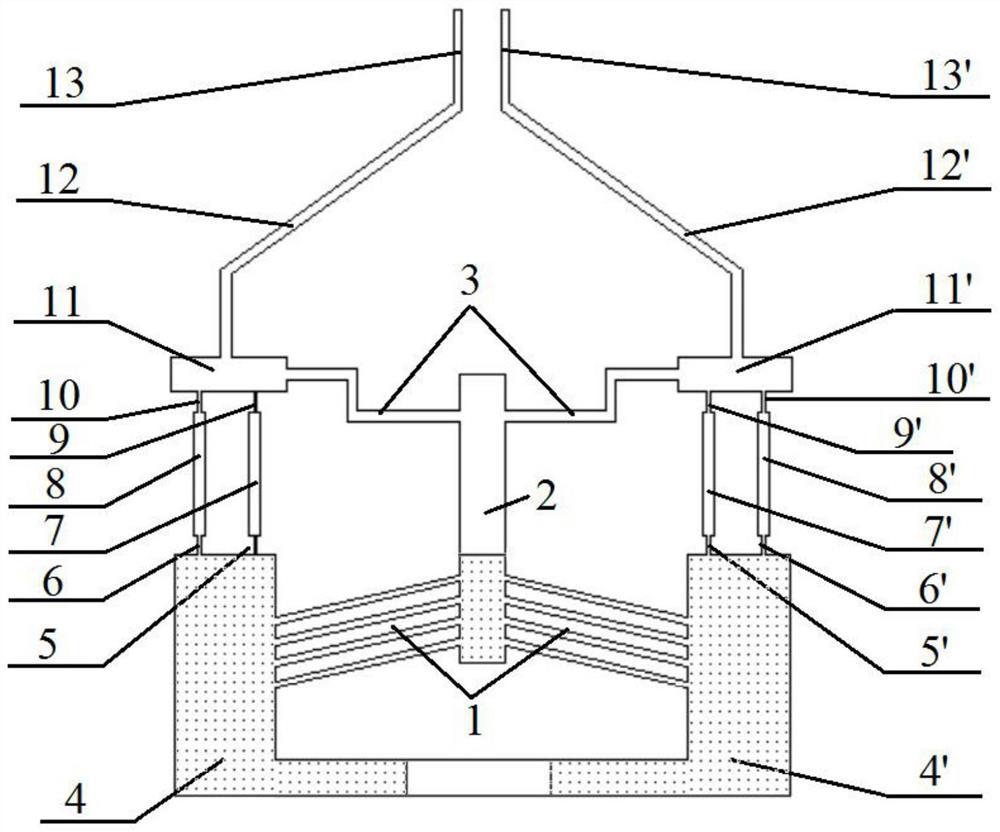
图1为本实用新型提出的一种三维电磁微机器人无缆驱动装置的结构示意图。
具体实施方式
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
参照图1,一种三维电磁微机器人无缆驱动装置,包括一对X轴赫姆霍兹线圈1、一对X轴麦克斯韦线圈2、一对Y轴赫姆霍兹线圈3、一对Y轴麦克斯韦线圈4、一对Z轴赫姆霍兹线圈5和一对Z轴麦克斯韦线圈6,上述每对线圈均平行设置,一对X轴赫姆霍兹线圈1位于一对X轴麦克斯韦线圈2内侧,一对Y轴赫姆霍兹线圈3位于一对Y轴麦克斯韦线圈4内侧,一对Z轴赫姆霍兹线圈5位于一对Z轴麦克斯韦线圈6内侧,所述一对Y轴赫姆霍兹线圈3、一对Y轴麦克斯韦线圈4位于一对X轴赫姆霍兹线圈1、一对X轴麦克斯韦线圈2外侧,一对Z轴赫姆霍兹线圈5和一对Z轴麦克斯韦线圈6位于一对X轴赫姆霍兹线圈1、一对X轴麦克斯韦线圈2内侧,三对赫姆霍兹线圈轴向方向两两正交,三对麦克斯韦线圈轴向方向两两正交,六对线圈轴向方向共同指向的中间区域为微机器人驱动的工作空间7。
本实用新型中,对于每一个轴方向上的赫姆霍兹线圈和麦克斯韦线均圈设计在同一个线圈骨架上。每个轴方向上的赫姆霍兹线圈和麦克斯韦线圈的线圈骨架互不干涉,每个线圈骨架留有槽来缠绕导线,制作线圈。
本实用新型中,六对线圈任意每对线圈可以用一个独立的电流源,也可以用两个独立的电流源来控制通入线圈的电流;本实施例中,对于整个三维电磁驱动装置最少需要六个独立的电流源,最多可用十二个独立的电流源;电流源可以采用可编程电流源,通入线圈的电流可以是直流电也可以是交流电。
在具体实施里,当线圈通入直流电时,工作空间7产生均匀磁场和均匀梯度的磁场,当线圈通入正余弦电流时可以在工作空间7产生旋转磁场。通过调整通入各线圈的电流,可以实时控制微机器人在工作空间7中不同方向的运动。
本实用新型中线圈骨架采用不导磁材料制作,线圈骨架槽中绕制的导线是具有绝缘层或涂有绝缘漆的导线。
本实用新型用来无缆驱动由磁性材料制作成的微机器人进行三维空间的运动,微机器人在工作空间7中具有五个自由度的运动。具体实施方式是根据微机器人无缆驱动的动力学方程,运动方式,通过控制输入各个线圈中的电流,在工作空间产生所要求的磁场,微机器人在磁场中收到磁力矩和磁力并克服自身重力等其他阻力在三维空间7中进行无缆控制运动。该三维磁驱动系统也可以作为产生特定磁场应用于其他领域,例如地磁补偿,磁场育种等方面的研究与应用。
以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
一种三维电磁微机器人无缆驱动装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


















动态评分
0.0