








专利摘要
本发明涉及一种具有两级放大机构的微夹钳,包括运动输入机构、两个位移输入平台、两个固定机架、四组第一级杠杆机构、两组第二级桥式放大机构和一对夹持臂,位移输入平台左右对称,第一级杠杆机构左右及上下对称,第二级桥式放大机构上下对称,夹持臂上下对称,运动输入机构的两端分别连接位移输入平台,位移输入平台的输出端分别经第一级杠杆机构与第二级桥式放大机构的输入端传动连接,第二级桥式放大机构的输出端连接夹持臂。本发明采用桥式放大机构具有对称性,保证微夹头的平行夹持,直接将输出位移传递给夹持臂,微夹头不会产生寄生位移,采用两级放大机构,将经过第一级放大的位移输入到桥式放大机构,具有更大的放大比。
权利要求
1.一种具有两级放大机构的微夹钳,其特征在于,包括运动输入机构、两个位移输入平台、两个固定机架、四组第一级杠杆机构、两组第二级桥式放大机构和一对夹持臂,其中,两个位移输入平台左右对称,四组第一级杠杆机构左右及上下对称,两组第二级桥式放大机构上下对称,一对夹持臂上下对称,所述运动输入机构的两端分别连接位移输入平台,所述位移输入平台的输出端分别经第一级杠杆机构与第二级桥式放大机构的输入端传动连接,所述第二级桥式放大机构的输出端连接夹持臂,两组第一级杠杆机构之间通过一固定机架连接,另两组第一级杠杆机构之间通过另一固定机架连接。
2.根据权利要求1所述的一种具有两级放大机构的微夹钳,其特征在于,所述的第一级杠杆机构包括依次连接的第一柔性铰链、第一刚性杆、第二柔性铰链、第二刚性杆和第三柔性铰链,所述第一级杠杆机构通过第一柔性铰链与位移输入平台连接。
3.根据权利要求2所述的一种具有两级放大机构的微夹钳,其特征在于,所述第二刚性杆的一端作为支点通过第三柔性铰链与固定机架传动连接,另一端作为第一级杠杆机构的输出端与第二级桥式放大机构的输入端传动连接。
4.根据权利要求3所述的一种具有两级放大机构的微夹钳,其特征在于,所述的第二级桥式放大机构包括一对依次连接的第四柔性铰链、第三刚性杆、第五柔性铰链,其中,第三刚性杆与第一级杠杆机构的输出端通过第四柔性铰链传动连接,第三刚性杆通过第五柔性铰链与夹持臂传动连接。
5.根据权利要求4所述的一种具有两级放大机构的微夹钳,其特征在于,所述的第一柔性铰链、第二柔性铰链、第三柔性铰链、第四柔性铰链及第五柔性铰链均为直角柔性铰链。
6.根据权利要求1-5任一项权利要求所述的一种具有两级放大机构的微夹钳,其特征在于,所述的运动输入机构为压电陶瓷驱动器。
7.根据权利要求1所述的一种具有两级放大机构的微夹钳,其特征在于,所述夹持臂的末端夹持方式为平行夹持。
说明书
技术领域
本发明涉及一种夹持装置,具体涉及一种具有两级放大机构的微夹钳。
背景技术
微夹钳作为微操作系统的执行末端,在微机电系统、扫描探针显微镜、超精密加工、光学调整以及生物细胞操作等诸多领域有着广泛应用。微夹钳一般包含一个驱动机构和一个运动传递机构,其中,运动传递机构通常有杠杆式机构、双摇杆机构和桥式机构等,杠杆式机构和双摇杆机构在微夹钳输出时会产生寄生位移,而桥式机构则可避免寄生位移的产生。
中国专利CN 103331748A公开了一种基于压电陶瓷驱动的小型化柔性微夹钳,该微夹钳包括有基座、预紧螺钉、运动传递机构、第一固定螺钉、第二固定螺钉、压电陶瓷驱动器和垫片;基座与运动传递机构通过第一固定螺钉和第二固定螺钉固定安装,预紧螺钉安装在运动传递机构的后端,压电陶瓷驱动器和垫片安装在运动传递机构的第一切缝内。但在该技术中,由于采用了双摇杆机构实现位移的输出,会导致寄生位移的产生。
微夹钳常见的末端夹持方式有角夹持、平行夹持和真空吮吸夹持,角夹持由于夹持末端形成一定的倾斜角度,当夹持圆柱状产品时易滑动。真空吮吸夹持只适用于在平面上的操作,而不规则平面将导致真空吮吸设备的漏气,进而导致夹持失效。
发明内容
本发明的目的就是为了解决上述问题而提供一种具有两级放大机构的微夹钳。
本发明的目的通过以下技术方案实现:
一种具有两级放大机构的微夹钳,包括运动输入机构、两个位移输入平台、两个固定机架、四组第一级杠杆机构、两组第二级桥式放大机构和一对夹持臂,其中,两个位移输入平台左右对称,四组第一级杠杆机构左右及上下对称,两组第二级桥式放大机构上下对称,一对夹持臂上下对称,所述运动输入机构的两端分别连接位移输入平台,所述位移输入平台的输出端分别经第一级杠杆机构与第二级桥式放大机构的输入端传动连接,所述第二级桥式放大机构的输出端连接夹持臂,所述第一级杠杆机构之间通过固定机架连接。
作为优选的技术方案,所述的第一级杠杆机构包括依次连接的第一柔性铰链、第一刚性杆、第二柔性铰链、第二刚性杆和第三柔性铰链,所述第一级杠杆机构通过第一柔性铰链与位移输入平台连接。
作为优选的技术方案,所述第二刚性杆的一端作为支点通过第三柔性铰链与固定机架传动连接,另一端作为第一级杠杆机构的输出端与第二级桥式放大机构的输入端传动连接。
作为优选的技术方案,所述的第二级桥式放大机构包括一对依次连接的第四柔性铰链、第三刚性杆、第五柔性铰链,其中,第三刚性杆与第一级杠杆机构的输出端通过第四柔性铰链传动连接,第三刚性杆与夹持臂通过第五柔性铰链传动连接。
作为优选的技术方案,所述的第一柔性铰链、第二柔性铰链、第三柔性铰链、第四柔性铰链及第五柔性铰链均为直角柔性铰链。
作为优选的技术方案,所述的运动输入机构为压电陶瓷驱动器。
作为优选的技术方案,所述夹持臂的末端夹持方式为平行夹持。
本发明的工作原理为:运动输入机构(压电陶瓷驱动器)施加力于位移输入平台,驱动四组第一级杠杆机构的第二刚性杆绕着第三柔性铰链进行转动,使四组第一级杠杆机构将第一柔性铰链处的输入位移在第四柔性铰链处进行放大,一级放大机构将第四柔性铰链处的位移输入到桥式放大机构的输入端,桥式放大机构通过两组第三刚性杆、第四柔性铰链和第五柔性铰链的协调变形,最终在夹持臂的末端输出放大位移。
本发明针对现有技术存在的不足,提供一种具有两级放大运动传递机构的无寄生位移的平行夹持微夹钳,依靠杠杆机构和桥式机构组成的两级复合串联放大机构,解决现有技术中夹持过程中产生的寄生位移、位移放大比低等问题,保证微夹钳具有较高的抓取精度的前提下能够实现微夹钳末端较大的变形。
与现有的技术相比,具有以下有益效果:
1)本发明采用的桥式放大机构具有对称性,从而保证微夹头的平行夹持,直接将输出位移传递给夹持臂,微夹头不会产生寄生位移。
2)本发明采用两级放大机构,将经过第一级放大的位移输入到桥式放大机构,相比单独使用一级或二级杠杆放大机构具有更大的放大比。
附图说明
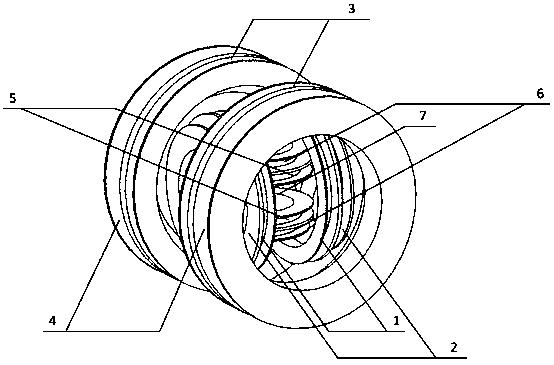
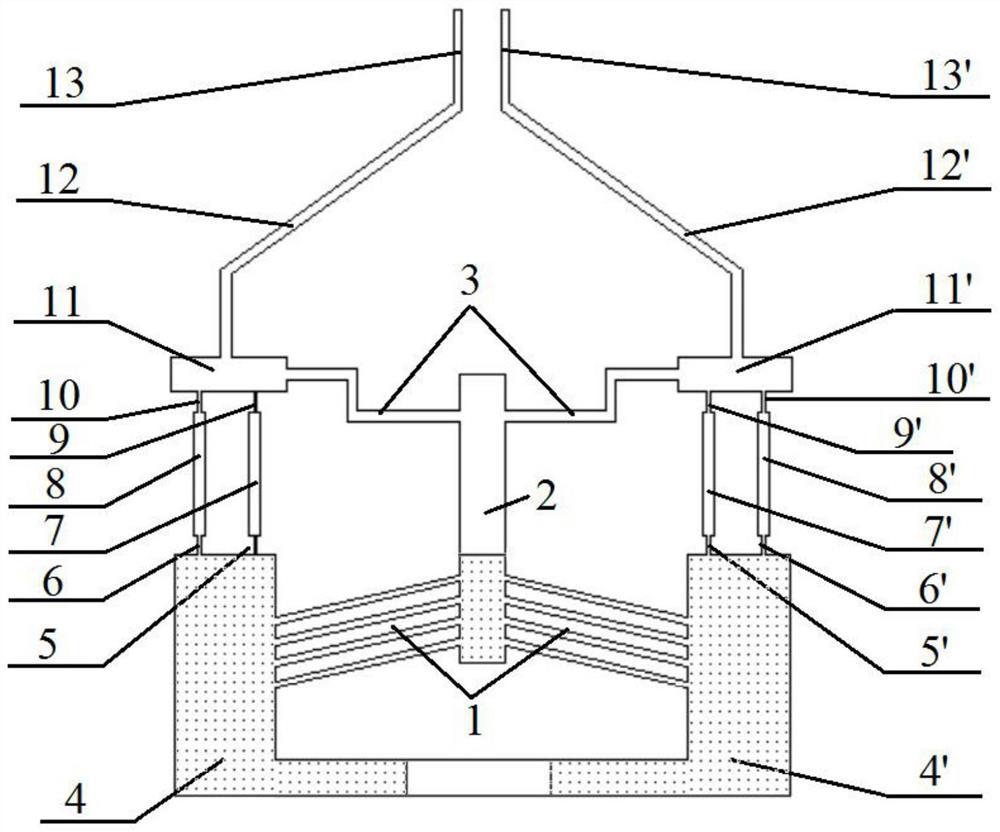
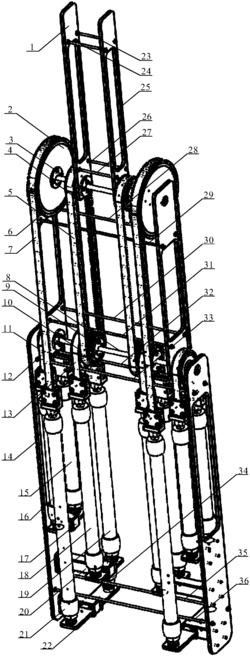
图1为本发明的结构示意图;
图2为本发明的变形原理示意图;
图中:1、21-位移输入平台,2-运动输入机构,3-第一柔性铰链,4-第一刚性杆,5-第二柔性铰链,6-第二刚性杆,7-第三柔性铰链,8-固定机架,9-第四柔性铰链,10-第三刚性杆,11-第五柔性铰链,12-夹持臂,13-第五柔性铰链,14-第三刚性杆,15-第四柔性铰链,16-第二刚性杆,17-第三柔性铰链,18-第二柔性铰链,19-第一刚性杆,20-第一柔性铰链,22-第一柔性铰链,23第一刚性杆,24-第二柔性铰链,25-第二刚性杆,26-第三柔性铰链,27-固定机架,28-第四柔性铰链,29-第三刚性杆,30-第五柔性铰链,31-夹持臂,32-第五柔性铰链,33-第三刚性杆,34-第四柔性铰链,35第三柔性铰链,36-第二刚性杆,37-第二柔性铰链,38-第一刚性杆,39-第一柔性铰链。
具体实施方式
下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
实施例1
一种具有两级放大机构的微夹钳,如图1、2所示,包括固定机架(由固定机架8和固定机架27组成)、位移输入平台1、21,运动输入机构2(本实施例采用压电陶瓷驱动器)、四组第一级杠杆机构(第一级杠杆机构40、42、43、45)及两组桥式放大机构(桥式放大机构41和桥式放大机构44),四组第一级杠杆机构和两组桥式放大机构分别对称,并且第一级杠杆机构的支点与固定机架8、27传动连接,运动输入机构2的两端分别连接位移输入平台1和位移输入平台21,四组第一级杠杆机构的输入端分别通过第一柔性铰链、第一刚性杆及第二柔性铰链与位移输入平台1、21传动连接,输出端分别与相应的第二级桥式放大机构的输入端传动连接,第二级桥式放大机构将第一级杠杆机构输出的水平方向的位移转化为竖直方向的位移,夹持臂12、31分别连接在两组桥式放大机构的输出端中间。
具体地,第一级杠杆机构40(42、43、45)包括第一刚性杆4(19、23、38)、第一柔性铰链3(20、22、39)、第二柔性铰链5(18、24、37)、第二刚性杆6(16、25、36)和第三柔性铰链7(17、26、35);桥式放大机构41(44)包括第三刚性杆10、14(29、33)、第四柔性铰链9、15(28、34)、第五柔性铰链11、13(30、32)和夹持臂12(31),各柔性铰链均为直角柔性铰链。
两组第一级杠杆机构40、42(45、43)的第一刚性杆分别位于一条水平线上,两组第一级杠杆机构40、45(42、43)的第二刚性杆分别位于一条竖直线上,两组桥式放大机构的第三刚性杆对称设置,并分别位于四组第一级杠杆机构之间。
固定机架8和固定机架27位于第二刚性杆的中间。
位移输入平台1和位移输入平台21平行设置在四组第一级放大机构左右两侧,夹持臂设置在桥式放大机构中间并形成上下对称。该实施例具有的无寄生位移平行夹持的柔性微夹钳总体上呈左右和上下对称状。
第二刚性杆6上一处作为第一级杠杆机构40的输入端与位移输入平台1通过第一刚性杆4、第一柔性铰链3和第二柔性铰链5传动连接,第二刚性杆6的一端作为第一级杠杆机构40的支点与固定机架8通过第三柔性铰链7传动连接,第二刚性杆6的另一端作为第一级杠杆机构40的输出端与桥式放大机构41的输入端通过第四柔性铰链9传动连接,第五柔性铰链11的末端作为桥式放大机构41的输出端与夹持臂12的一侧传动连接。
第二刚性杆16上一处作为第一级杠杆机构42的输入端与位移输入平台21通过第一刚性杆19、第一柔性铰链20和第二柔性铰链18传动连接,第二刚性杆16的一端作为第一级杠杆机构42的支点与固定机架8通过第三柔性铰链17传动连接,第二刚性杆16的另一端作为第一级杠杆机构42的输出端与桥式放大机构41的输入端通过第四柔性铰链15传动连接,第五柔性铰链13的末端作为桥式放大机构41的输出端与夹持臂12的另一侧传动连接。
第二刚性杆25上一处作为第一级杠杆机构43的输入端与位移输入平台21通过第一刚性杆23、第一柔性铰链22和第二柔性铰链24传动连接,第二刚性杆25的一端作为第一级杠杆机构43的支点与固定机架27通过第三柔性铰链26传动连接,第二刚性杆25的另一端作为第一级杠杆机构43的输出端与桥式放大机构44的输入端通过第四柔性铰链28传动连接,第五柔性铰链30的末端作为桥式放大机构44的输出端与夹持臂31的一侧传动连接。
第二刚性杆36上一处作为第一级杠杆机构45的输入端与位移输入平台1通过第一刚性杆38、第一柔性铰链39和第二柔性铰链37传动连接,第二刚性杆36的一端作为第一级杠杆机构45的支点与固定机架27通过第三柔性铰链35传动连接,第二刚性杆36的另一端作为第一级杠杆机构45的输出端与桥式放大机构44的输入端通过第四柔性铰链34传动连接,第五柔性铰链32的末端作为桥式放大机构44的输出端与夹持臂31的另一侧传动连接。
运动输入机构2施加力于位移输入平台1、21,驱动四组第二刚性杆绕着四个第三柔性铰链进行转动,使四组第一级杠杆机构将第一柔性铰链处的输入位移在第四柔性铰链处进行放大。第四柔性铰链处的位移输入到桥式放大机构的输入端,桥式放大机构通过柔性铰链和刚性杆的协调变形,最终在夹持臂末端输出放大位移。
一种具有两级放大机构的微夹钳专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0