









专利摘要
本发明为一种自驱动可重构模块化机器人及其制备方法。本发明的可重构模块化机器人,以经过铂纳米颗粒不对称修饰的碳纳米材料纤维作为组装单元,通过模块化组装方式首尾连接构成;组装单元上铂纳米颗粒在化学溶剂过氧化氢溶液中催化分解反应产生气泡,使纤维状组装单元在液面上获得稳定的推力矩,从而形成稳定的类定轴旋转;多根纤维状自驱动单元经结构设计与定向受力分析,通过模块化组装的方式得到高度可定制化的微型制动系统,根据实际使用场景需要达到稳定可控的旋转或直线位移运动;所述的碳纳米材料纤维为取向碳纳米管纤维或石墨烯纤维。这种可重构模块化微型机器人在更加智能化、运动模式更加高度可控的微型机器人领域具有巨大的应用潜力。
权利要求
1.一种可重构模块化微型机器人的制备方法,其特征在于,该微型机器人经过铂纳米颗粒不对称修饰的碳纳米材料纤维作为组装单元,通过模块化组装方式首尾连接构成;组装单元上铂纳米颗粒在化学溶剂过氧化氢溶液中催化分解反应产生气泡,使纤维状组装单元在液面上获得稳定的推力矩,从而形成稳定的类定轴旋转;多根纤维状自驱动单元经结构设计与定向受力分析,通过模块化组装的方式得到高度可定制化的微型制动系统,根据实际使用场景需要达到稳定可控的旋转或直线位移运动;所述的碳纳米材料纤维为取向碳纳米管纤维或石墨烯纤维;
具体步骤为:
(1)碳纳米材料纤维的制备,包括取向多壁碳纳米管纤维的制备和石墨烯纤维的制备:
取向多壁碳纳米管纤维的制备:首先将取向多壁碳纳米管薄膜以刀片直接从宽度为3-7厘米的可纺多壁碳纳米管阵列中牵引出来,使用手动纺丝机在300-1000转每分钟的转速下,将其卷裹为取向多壁碳纳米管纤维,沿纤维轴向滴涂乙醇溶液,室温下干燥1-2小时,得到定型的取向多壁碳纳米管纤维;
石墨烯纤维的制备:取20-60克氧化石墨烯粉末分散在10-30毫升去离子水中,获得氧化石墨烯分散液,超声振荡2-4小时,然后将该分散液加热浓缩至2毫升;将所得浓缩液注入内径为50-500微米的聚四氟乙烯管,将其两端密封,150-280℃温度条件下在马弗炉中加热2-6小时,得到石墨烯纤维;
(2)铂纳米粒子不对称修饰的纤维状微型机器人组装单元的制备:
配置含0.1-1毫摩尔每升氯铂酸钾,0.1-1摩尔每升的电解液,采用三电极体系,通过电化学沉积,在碳纳米材料纤维表面修饰铂纳米颗粒;其中,工作电极为直径10-100微米、长度1-10毫米的碳纳米材料纤维,碳纳米材料纤维固定在载玻片上,使其只有一个圆柱面充分浸润在电解液中,且使碳纳米材料纤维长度的二分之一在电解液液面之上,对电极为铂丝,参比电极为银/氯化银电极;采用双电位阶跃法进行电化学沉积,电位1为0.4-0.5伏,维持时间10-20秒,电位2为-0.7伏至-0.5伏,维持时间10-20秒,如上组合20-40秒为一个周期;进行双电位阶跃沉积10-200个周期,从电解液中取出载玻片,室温下干燥1-2小时,获得接近四分之一纤维侧圆柱面修饰铂纳米颗粒的纤维状微型机器人组装单元;
其中,当碳纳米材料纤维为取向多壁碳纳米管纤维时,得到的是基于取向多壁碳纳米管的纤维状微型机器人组装单元;当碳纳米材料纤维为石墨烯纤维时,得到的是基于石墨烯的纤维状微型机器人组装单元;
(3)可重构模块化微型机器人制动体系的制备:
将步骤(2)中所得纤维状微型机器人组装单元以首尾相连的方式,通过受力分析,组成不同的二维或三维结构,即实现具有不同运动模式的可重构模块化微型机器人制动体系。
2.根据权利要求1所述的可重构模块化微型机器人的制备方法,其特征在于,步骤(3)中,所述通过受力分析组成不同的二维结构,包括:使组成组装体的合力矩同为顺时针或同为逆时针,则组装体整体产生旋转运动;或者使组成组装体的合力矩方向一致,则组装体产生直线位移运动。
3.根据权利要求2所述的可重构模块化微型机器人的制备方法,其特征在于,步骤(3)中,所述通过受力分析组成不同的三维结构,包括:在组装成二维直线运动模式的组装体后,在其垂直方向进一步组装普通取向碳纳米管纤维作为垂直支撑,这样即搭建成三维结构的微型驱动运输体系。
说明书
技术领域
本发明属于微型机器人技术领域,具体涉及一种化学溶剂供能的自驱动可重构模块化机器人及其制备方法。
背景技术
微型机器人因其在狭小空间内完成特定任务的潜力,例如靶向输送药物、细胞操纵、生物成像和非侵入式微型手术等,近年来成为了机器人学得重要分支之一。与传统宏观功能化机器人不同的是,微型机器人的框架在作为结构支撑的同时,也承担了驱动模块的功能,以满足体系整体微型、紧凑且能完成特定任务的要求。通过化学能驱动微型机器人是目前研究最为广泛的机理之一。通过对合适材料进行微结构的设计,使该结构在一定条件下进行特定化学反应,反应物或反应所产生的能量由该结构表面不对称释放或耗散,从而实现净驱动力的产生。
一系列基于上述原理,通过合成制备具有Janus结构的纳米粒子、纳米线和纳米棒等结构以实现微型结构自主运动的工作已经取得了一定进展
发明内容
本发明的目的在于提供一种运动可控性好、环境适应性强的可重构模块化机器人及其制备方法。
本发明包括通过普适性方法制备纤维状微型机器人组装单元,基于此种组装单元进一步构建具备更高结构复杂度、且可控性强的微型制动系统。
本发明制备的纤维状微型机器人,其组装单元为不对称铂纳米颗粒修饰的碳纳米材料纤维,具有轻质、强韧的结构特点,在过氧化氢溶液中能通过催化反应释放气泡获得稳定的推力矩,从而实现类定轴旋转。通过对纤维状组装单元的受力分析和模块化组装,可较为简单地构建不同几何结构、运动模式的微型制动体系,并基于此体系完成预定轨迹的运动。
所述的碳纳米材料纤维包括碳纳米管纤维或石墨烯纤维,但不限于这两者。
具体来说,本发明提供的可重构模块化微型机器人,由化学溶剂供能,以经过铂纳米颗粒不对称修饰的碳纳米材料纤维作为组装单元,通过模块化组装方式首尾连接构成;组装单元上铂纳米颗粒在化学溶剂过氧化氢溶液中催化分解反应产生气泡,使纤维状组装单元在液面上获得稳定的推力矩,从而形成稳定的类定轴旋转;多根纤维状自驱动单元经结构设计与定向受力分析后,可通过模块化组装的方式得到高度可定制化的微型制动系统,根据实际使用场景需要达到稳定可控的旋转或直线位移运动。
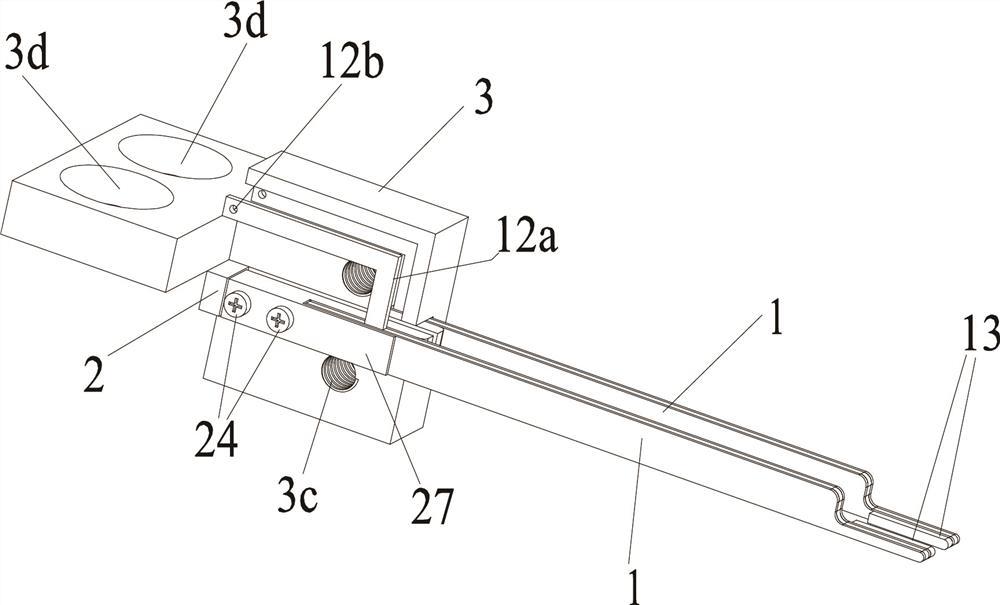
本发明中,所述的纤维状机器人组装单元,由四分之一圆柱面负载了铂纳米颗粒的碳纳米材料纤维构成。纤维表面的铂纳米粒子修饰通过电化学沉积完成,在沉积过程中,将一定长度的碳纳米材料纤维固定在玻璃载玻片上作为工作电极(参见图1)。由于载玻片的遮蔽效应,使纤维整体只有一面充分暴露在电解液中,从而产生致密镀铂面(即背对载玻片的面)和稀疏镀铂面(即紧贴载玻片的面)(见图1(b)中所示),实现铂纳米粒子的不对称修饰,从而可在过氧化氢溶液液面上实现净推力,进而完成定轴旋转(参见图2),其旋转角速度最大可至22.3弧度每秒。因该种纤维状组装单元能提供稳定的转矩,使得单个组装单元在二维平面内的运动具有可预测性,为进一步组装提供了可能,通过对单根组装单元的二级组装,可实现形状、运动模式均高度可控的模块化微型制动系统。
本发明提供的可重构模块化微型机器人的制备方法,具体步骤如下:
(1)碳纳米材料纤维的制备,包括取向多壁碳纳米管纤维的制备和石墨烯纤维的制备:
取向多壁碳纳米管纤维的制备:首先将取向多壁碳纳米管薄膜以刀片直接从宽度为3-7厘米的可纺多壁碳纳米管阵列中牵引出来,使用手动纺丝机在300-1000转每分钟的转速下,将其卷裹为取向多壁碳纳米管纤维,沿纤维轴向滴涂乙醇溶液,室温下干燥1-2小时,得到定型的取向多壁碳纳米管纤维;
石墨烯纤维的制备:取20-60克氧化石墨烯粉末分散在10-30毫升去离子水中,获得氧化石墨烯分散液,超声振荡2-4小时,然后将该分散液加热浓缩至2毫升;将所得浓缩液注入内径为50-500微米的聚四氟乙烯管,将其两端密封,150-280℃温度条件下在马弗炉中加热2-6小时,得到石墨烯纤维;
(2)铂纳米粒子不对称修饰的纤维状微型机器人组装单元的制备:
配置含0.1-1毫摩尔每升氯铂酸钾,0.1-1摩尔每升的电解液,采用三电极体系,通过电化学沉积,在碳纳米材料纤维表面修饰铂纳米颗粒;其中,工作电极为直径10-100微米、长度1-10毫米的碳纳米材料纤维,碳纳米材料纤维固定在载玻片上,使其只有一个圆柱面充分浸润在电解液中,且使碳纳米材料纤维长度的二分之一在电解液液面之上,对电极为铂丝,参比电极为银/氯化银电极;采用双电位阶跃法进行电化学沉积,电位1为0.4-0.5伏,维持时间10-20秒,电位2为-0.7伏至-0.5伏,维持时间10-20秒,如上组合20-40秒为一个周期;进行双电位阶跃沉积10-200个周期,从电解液中取出载玻片,室温下干燥1-2小时,获得接近四分之一纤维侧圆柱面修饰铂纳米颗粒的纤维状微型机器人组装单元;
其中,当碳纳米材料纤维为取向多壁碳纳米管纤维时,得到的是基于取向多壁碳纳米管的纤维状微型机器人组装单元;当碳纳米材料纤维为石墨烯纤维时,得到的是基于石墨烯的纤维状微型机器人组装单元;
(3)可重构模块化微型机器人制动体系的制备:
将步骤(2)中所得纤维状微型机器人组装单元以首尾相连的方式,通过简单受力分析,组成不同的二维或三维结构,即可实现具有不同运动模式的可重构模块化微型机器人制动体系。这里所说受力分析,例如,使组成组装体的合力矩同为顺时针或同为逆时针,则组装体整体产生旋转运动,如图4(a);又如,使组成组装体的合力矩方向一致,则组装体产生直线位移运动,如图4(b)。
上述制备的可重构模块化微型机器人,放置在质量分数为10-30%的过氧化氢溶液液面上,可通过微型制动系统纤维结构上的铂颗粒催化反应释放气泡形成推力,从而实现预先设计的旋转或直线位移运动模式(图7)。
上述制备的可重构模块化微型机器人,通过三维层面的纤维单元组装,可在狭小空间内完成按指定路线运载1-6立方厘米石墨烯气凝胶货物的任务(图8)。
本发明中,所述取向碳纳米管阵列可采用如下方法制备:采用化学气相沉积法合成垂直取向的可纺多壁碳纳米管阵列。其中,催化剂使用Fe(1-2 nm)/Al2O3(8-12 nm),碳源为乙烯,气相载体为氩气和氢气的混合气体,化学气相沉积得到可纺的碳纳米管阵列;括号内的数值为对应材料的厚度。
由本方法得到的纤维状微型机器人组装单元,能在过氧化氢溶液液面形成稳定的转动,得益于取向碳纳米管纤维和石墨烯纤维优异的电导率(10
进一步地,通过镀铂碳纳米纤维(取向碳纳米管或石墨烯纤维组装单元)组装成二维直线运动模式的组装体后,在已有二维组装体结构的垂直方向进一步组装普通取向碳纳米管纤维作为垂直支撑,这样即可搭建三维结构的微型驱动运输体系(如图8),并可实现较大体积运载物的运输。这种可重构模块化微型机器人在面向更加智能化、运动模式更加高度可控的微型机器人领域具有巨大的应用潜力。
附图说明
图1为基于碳纳米材料的纤维状微型机器人组装单元制备流程图。其中,a为电沉积过程中载玻片挡板的设置方式,b为按a中方式制备的铂纳米粒子修饰的碳纳米材料纤维的细节图,其镀铂修饰段可分为如图所示的致密镀铂面和稀疏镀铂面。
图2为基于碳纳米材料的纤维状微型机器人组装单元的驱动示意图。其中,a为纤维组装单元的旋转示意图,即由纤维表面铂纳米粒子催化过氧化氢溶液产生气泡,形成转动力矩,进而形成旋转;b为a的具体受力分析图,催化反应产生推力和液面黏度产生阻力的最终合力与推力方向一致,对整根纤维形成旋转推动力。
图3为基于取向碳纳米管纤维的纤维状微型机器人组装单元结构示意图及扫描电子显微镜图像。其中,a为基于取向碳纳米管纤维组装单元的结构示意图,b、c为a中对应界面的扫描电子显微镜图像。
图4为六种典型组装体的受力分析示意图。其中,a中三种二维结构所得合力使整体结构产生旋转运动,b中三种二维结构所得合力使整体结构产生直线位移运动。
图5为暗场条件下拍摄的单根纤维组装单元在30%过氧化氢液面转动视频的逐帧图像。其中,每帧图像右下角为对应旋转运动对应的方位示意图。
图6为通过组装纤维组装单元形成的驱动组装体示意图(左)及实物图(右)。其中,a中十种组装体表现为旋转运动模式,b中十种组装体表现为直线位移运动形式。
图7为通过组装纤维组装单元形成的6种驱动组装体的实物运动视频逐帧图像。其中,左第一列为对应的结构示意图,右侧为运动情况截图。
图8为通过组装纤维组装单元形成的三维“鱼”形状的可重构模块化微型机器人驱动体系。其中,a为结构示意图,b为未载物(左侧)和载物(右侧)时的实物图,c为其运载石墨烯气凝胶运动视频的逐帧截图。
具体实施方式
实施例1
(1)制备取向碳纳米管纤维:将取向多壁碳纳米管薄膜以刀片直接从宽度为7毫米的可纺多壁碳纳米管阵列中牵引出来,使用手动纺丝机在800转每分钟的转速下,将其卷裹为取向多壁碳纳米管纤维,沿纤维轴向滴涂乙醇溶液,室温下干燥2小时得到定型后的取向多壁碳纳米管纤维;
(2)制备铂纳米粒子不对称修饰的纤维状微型机器人组装单元:配置含1毫摩尔每升氯铂酸钾,0.1摩尔每升氯化钾的电解液,采用三电极体系进行电化学沉积在取向多壁碳纳米管纤维表卖弄修饰铂纳米颗粒;其中工作电极为直径50微米、长度4毫米的碳纳米管纤维,碳纳米管纤维固定在载玻片上,使其只有一个圆柱面充分浸润在电解液中,且使碳纳米管纤维长度的二分之一在电解液液面之上,对电极为铂丝,参比电极为银/氯化银电极;采用双电位阶跃法进行电化学沉积,电位1为0.5伏,维持时间10秒,电位2为-0.7伏,维持时间10秒,如上组合20秒为一个周期;进行双电位阶跃沉积110个周期,从电解液中取出载玻片室温下干燥2小时后获得接近四分之一纤维侧圆柱面修饰铂纳米颗粒的纤维状微型机器人组装单元;
(3)制备可重构模块化微型机器人旋转制动体系:将6个步骤(2)中所得纤维状微型机器人组装单元顺侧排列,将它们的尾端连接在一起,形成的辐射状六角形(图4第一行),即可在30%过氧化氢溶液表面实现旋转运动。
实施例2
(1)制备取向碳纳米管纤维:将取向多壁碳纳米管薄膜以刀片直接从宽度为8毫米的可纺多壁碳纳米管阵列中牵引出来,使用手动纺丝机在950转每分钟的转速下,将其卷裹为取向多壁碳纳米管纤维,沿纤维轴向滴涂乙醇溶液,室温下干燥1小时得到定型后的取向多壁碳纳米管纤维;
(2)制备铂纳米粒子不对称修饰的纤维状微型机器人组装单元:配置含1毫摩尔每升氯铂酸钾,0.1摩尔每升氯化钾的电解液,采用三电极体系进行电化学沉积在取向多壁碳纳米管纤维表卖弄修饰铂纳米颗粒;其中工作电极为直径80微米、长度3毫米的碳纳米管纤维,碳纳米管纤维固定在载玻片上,使其只有一个圆柱面充分浸润在电解液中,且使碳纳米管纤维长度的二分之一在电解液液面之上,对电极为铂丝,参比电极为银/氯化银电极;采用双电位阶跃法进行电化学沉积,电位1为0.5伏,维持时间10秒,电位2为-0.7伏,维持时间10秒,如上组合20秒为一个周期;进行双电位阶跃沉积90个周期,从电解液中取出载玻片室温下干燥1小时后获得接近四分之一纤维侧圆柱面修饰铂纳米颗粒的纤维状微型机器人组装单元;
(3)制备可重构模块化微型机器人直线位移制动体系:将4个步骤(2)中所得纤维状微型机器人组装单元对称排列,将它们的头部连接在一起,形成类似爪的对称形状(图4第六行),即可在25%过氧化氢溶液表面实现旋转运动。
实施例3
(1)制备石墨烯纤维:取60克氧化石墨烯粉末分散在30毫升去离子水中获得氧化石墨烯分散液,超声振荡3小时后将该分散液加热浓缩至2毫升;将所得浓缩液注入内径为70微米的聚四氟乙烯管后将其两端密封,200℃温度条件下在马弗炉中加热5小时,得到石墨烯纤维;
(2)制备铂纳米粒子不对称修饰的纤维状微型机器人组装单元:配置含1毫摩尔每升氯铂酸钾,0.1摩尔每升氯化钾的电解液,采用三电极体系进行电化学沉积在取向多壁碳纳米管纤维表卖弄修饰铂纳米颗粒;其中工作电极为直径70微米、长度5毫米的碳纳米管纤维,碳纳米管纤维固定在载玻片上,使其只有一个圆柱面充分浸润在电解液中,且使碳纳米管纤维长度的二分之一在电解液液面之上,对电极为铂丝,参比电极为银/氯化银电极;采用双电位阶跃法进行电化学沉积,电位1为0.5伏,维持时间10秒,电位2为-0.7伏,维持时间10秒,如上组合20秒为一个周期;进行双电位阶跃沉积70个周期,从电解液中取出载玻片室温下干燥1小时后获得接近四分之一纤维侧圆柱面修饰铂纳米颗粒的纤维状微型机器人组装单元;
(3)制备可重构模块化三维运载微型机器人制动体系:将6个步骤(2)中所得纤维状微型机器人组装单元及另外8根步骤(1)中所得石墨烯纤维按图5中排列,形成类似“鱼”骨架的三维骨架,将体积约为5立方厘米的石墨烯气凝胶(绿色染料染色)即可在20%过氧化氢溶液表面实现定向运载。
参考文献
[1]Simmchen, J.; Katuri, J.; Uspal, W. E.; Popescu, M. N.;Tasinkevych, M.; Sánchez, S.
[2]Dong, R.; Zhang, Q.; Gao, W.; Pei, A.; Ren, B.
[3]Dai, B.; Wang, J.; Xiong, Z.; Zhan, X.; Dai, W.; Li, C. C.; Feng,S. P.; Tang, J.
[4]Qin, L.; Banholzer, M. J.; Xu, X.; Huang, L.; Mirkin, C. A.
一种可重构模块化微型机器人及其制备方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0