





专利摘要
本发明公开了一种对象检测系统(24),所述对象检测系统具有用于检测掩埋对象(26)的转换器(40,40′)。转换器被封装在结实的电磁可透的结构(42)中。
权利要求
1.一种通过探地雷达进行通信的方法,所述方法包括以下步骤:
提供发射器和检测器,所述发射器和检测器中的每一个都联接到被构造以穿透地面的工具;
通过发射器发送探地信号;
通过检测器检测来自探地信号的串扰;和
基于串扰的特征确定检测器和发射器中的至少一个相对于地面的位置。
2.根据权利要求1所述的方法,其中基于在发出探地信号之后所述串扰到达检测器的到达时间来确定检测器和发射器中的至少一个相对于地面的位置。
3.根据权利要求1所述的方法,其中基于所述串扰的幅值确定检测器和发射器中的至少一个相对于地面的位置。
4.根据权利要求1所述的方法,其中检测器和发射器在所述工具上间隔开。
5.根据权利要求1所述的方法,其中发射器和检测器中的每一个都包括转换器和电介质,其中所述转换器的至少一部分被设置在所述电介质内。
6.根据权利要求1所述的方法,进一步包括以下步骤:一旦确定检测器和发射器中的至少一个与地面接触,则通过发射器发送第二探地信号,所述第二探地信号相比之前的探地信号具有更大的幅值和更高的频率中的至少一项。
7.根据权利要求6所述的方法,进一步包括以下步骤:基于第二探地信号从对象的反射检测位于地下的对象。
8.根据权利要求1所述的方法,进一步包括以下步骤:将工具从第一位置移动到第二位置,所述发送步骤包括当工具处于第一位置时通过发射器发送第一探地信号和当工具处于第二位置时通过发射器发送第二探地信号。
9.根据权利要求8所述的方法,其中所述确定步骤包括:比较来自第一探地信号的串扰的特征与来自第二探地信号的串扰的特征以确定所述检测器和发射器中的至少一个相对于地面的位置。
10.一种通过探地雷达进行通信的方法,所述方法包括以下步骤:
提供工具和联接到所述工具的检测系统,所述检测系统包括发射器和接收器,所述工具被构造以穿透地面;
通过发射器发送探地信号;
基于发射器与接收器之间的信号耦合确定检测系统相对于地面的位置;以及
一旦确定检测系统与地面接触,就增加探地信号的幅值。
11.根据权利要求10所述的方法,进一步包括以下步骤:
将工具从第一位置移动到第二位置,其中在第一位置处,检测系统被设置成远离地面,而在第二位置处,检测系统被设置位成与地面接触。
12.根据权利要求11所述的方法,其中当所述工具位于第一位置时,所述探地信号具有第一幅值,而当所述工具位于第二位置时,所述探地信号具有第二幅值,所述第二幅值大于所述第一幅值。
13.根据权利要求10所述的方法,其中所述增加步骤包括:
增加探地信号的功率和频率中的至少一项。
14.根据权利要求10所述的方法,其中所述确定步骤包括:
比较当工具处于第一位置时发射器与接收器之间的信号耦合的特征与当工具处于第二位置时发射器与接收器之间的信号耦合的特征。
15.一种通过探地雷达进行通信的方法,所述方法包括以下步骤:
提供工具和联接到所述工具的检测系统,所述检测系统包括发射器和接收器并被构造以检测位于地下的对象;
通过工具穿透地面以产生穿透区;
在发射器与对象之间发送信号;
通过接收器识别来自信号的串扰;
基于信号的串扰确定地面的介电特性。
16.根据权利要求15所述的方法,其中所述确定步骤基于在发送步骤之后所述串扰到达接收器的到达时间。
17.根据权利要求15所述的方法,其中所述确定步骤基于串扰的幅值。
18.根据权利要求15所述的方法,其中发射器和接收器间隔开一段距离,地面的介电特性的确定还基于发射器与接收器之间的所述距离。
19.根据权利要求15所述的方法,进一步包括以下步骤:
基于来自对象的信号反射检测位于地下的对象,和基于反射和所确定地面的介电特性计算所述对象的位置。
20.根据权利要求15所述的方法,其中发射器和接收器中的每一个都包括转换器和电介质,其中转换器的至少一部分被设置在电介质内以充分地减少转换器与地面之间的信号损失。
21.一种建筑车辆,包括:
底盘;
被设置以支撑底盘的多个牵引装置;
作业工具,所述作业工具由底盘支撑并被构造以穿透地面;和
检测系统,所述检测系统包括被构造以发送探地信号的发射器和被构造以检测来自所述探地信号的串扰的检测器,发射器和检测器被安装到所述作业工具,所述检测系统被构造以基于来自探地信号的串扰的特征确定检测器和发射器中的至少一个相对于地面的位置。
22.根据权利要求21所述的建筑车辆,其中串扰的特征包括串扰到达检测器的到达时间和串扰的幅值中的至少一项。
23.根据权利要求21所述的建筑车辆,其中检测系统包括控制器,所述控制器被构造以分析通过检测器检测到的串扰以确定所述检测器和发射器中的至少一个相对于地面的位置,以及一旦确定所述检测器和发射器中的至少一个与地面接触就启动控制事件。
24.根据权利要求23所述的建筑车辆,其中控制事件包括增加探地信号的功率和频率中的至少一项。
25.根据权利要求21所述的建筑车辆,其中检测系统包括显示器,所述显示器被构造以提供检测器和发射器中的至少一个与地面接触的可视指示。
26.根据权利要求21所述的建筑车辆,其中检测系统被构造以便一旦确定检测器和发射器中的至少一个与地面接触就提供声频信号。
27.根据权利要求21所述的建筑车辆,其中发射器和检测器中的每一个都包括转换器和电介质,其中转换器的至少一部分被设置在电介质内。
28.一种检测器组件,所述检测器组件被构造以检测位于地下的对象,所示检测器组件包括:
具有内部区域的壳体结构;
天线,所述天线被设置在壳体结构的内部区域中并被构造以传递探地信号;和
围绕所述壳体结构模制而成的电介质,壳体结构与电介质协作以充分地减少探地信号在天线与地面之间的传递过程中的信号损失。
29.根据权利要求28所述的检测器组件,进一步包括被构造以穿透地面的作业工具,所述天线和壳体结构被安装到作业工具。
30.根据权利要求29所述的检测器组件,其中天线和壳体结构形成作业工具的切削元件的一部分,电介质形成所述切削元件的切削刃。
31.根据权利要求30所述的检测器组件,进一步包括安装到作业工具的检测器,其中所述天线被构造以向设置在地下的对象发送探地信号,并且所述检测器被构造以接收来自所述对象的探地信号的反射。
32.根据权利要求29所述的检测器组件,其中电介质包括聚氨酯材料。
33.根据权利要求29所述的检测器组件,其中壳体结构由刚性聚合物组成。
34.根据权利要求33所述的检测器组件,其中壳体结构和电介质具有基本上相同的介电特性。
35.一种通过探地雷达进行通信的方法,所述方法包括以下步骤:
提供作业工具、转换器,和具有用于容纳转换器的内部区域的壳体结构;
在壳体结构周围模制电介质;
将转换器固定在壳体结构的内部区域中;
将壳体结构和转换器联接到作业工具;
通过作业工具穿透地面以产生穿透区;以及
在所述穿透步骤过程中通过转换器发送探地信号。
36.根据权利要求35所述的方法,其中电介质、壳体结构、和地面具有基本上相同的介电特性以充分地减少在发送步骤过程中的信号损失。
37.根据权利要求36所述的方法,其中电介质包括聚氨酯材料,而壳体结构包括刚性聚合物。
38.根据权利要求35所述的方法,其中壳体结构和转换器形成作业工具的切削元件的一部分,电介质形成所述切削元件的切削表面。
39.根据权利要求35所述的方法,进一步包括以下步骤:
将检测器安装到作业工具,所述检测器被构造以接收来自被设置在地下的对象的探地信号的反射。
说明书
技术领域
本公开涉及一种与探地雷达进行通信的系统和方法。更具体地,本公开涉及一种用于在检测掩埋物时使用天线串扰进行探地雷达通信的系统和方法。
背景技术
在已经发展好的公共拥挤区域执行多种挖掘。许多城市地区中的地下空间的拥挤以及较差的记录保存和从地面精确定位掩埋物的难度已经导致在机械挖掘期间造成对许多公共事业建筑的不经意的撞击。公共事业建筑撞击可能会导致工作停止命令和延迟,对掩埋的公共事业建筑的机械损坏,以及与诉讼、保险、停工、以及维修相关联的许多成本。
发明内容
根据本公开的一个示例性实施例,提供了一种通过探地雷达进行通信的方法。所述方法包括以下步骤:提供发射器和检测器,所述发射器和检测器中的每一个都联接到被构造以穿透地面的工具;通过发射器发送探地信号;通过检测器检测来自探地信号的串扰。所述方法还包括基于串扰的特征确定检测器和发射器中的至少一个相对于地面的位置的步骤。
根据本公开的另一个示例性实施例,提供了一种通过探地雷达进行通信的方法,所述方法包括提供工具和联接到所述工具的检测系统的步骤。所述检测系统包括发射器和接收器,并且所述工具被构造以穿透地面。该方法还包括通过发射器发送探地信号和基于发射器与接收器之间的信号耦合确定检测系统相对于地面的位置的步骤。该方法还包括一旦确定检测系统与地面接触就增加探地信号的幅值的步骤。
根据本公开的又一个示例性实施例,提供了一种通过探地雷达进行通信的方法。所述方法包括提供工具和联接到所述工具的检测系统的步骤。所述检测系统包括发射器和接收器并被构造以检测位于地下的对象的。所述方法还包括以下步骤:通过工具穿透地面以产生穿透区;在发射器与对象之间发送信号;和通过接收器识别来自信号的串扰。该方法还包括基于信号的串扰确定地面的介电特性的步骤。
根据本公开的又一个示例性实施例,提供了一种建筑车辆,该建筑车辆包括:底盘;被设置以支撑底盘的多个牵引装置;作业工具,所述作业工具由底盘支撑并被构造以穿透地面。该建筑车辆还包括检测系统,所述检测系统包括被构造以发送探地信号的发射器和被构造以检测来自所述探地信号的串扰的检测器。发射器和检测器被安装到所述作业工具。所述检测系统被构造以基于来自探地信号的串扰的特征确定检测器和发射器中的至少一个相对于地面的位置。
根据本公开的又一个示例性实施例,提供了一种检测器组件,所述检测器组件被构造以检测位于底下的对象。检测器组件包括具有内部区域的壳体结构。所述检测器组件还包括被设置在壳体结构的内部区域中的天线。所述天线并被构造以传递探地信号;电介质被模制在所述壳体结构周围。所述壳体结构与电介质协作以充分地减少探地信号在天线与地面之间的传递过程中的信号损失。
根据本公开的又一个示例性实施例,提供了一种通过探地雷达进行通信的方法。所述方法包括提供作业工具、转换器,和具有用于容纳转换器的内部区域的壳体结构的步骤。所述方法还包括以下步骤:在壳体结构周围模制电介质;将转换器固定在壳体结构的内部区域中;将壳体结构和转换器联接到作业工具。所述方法还包括通过作业工具穿透地面以产生穿透区以及在所述穿透步骤过程中通过转换器发送探地信号的步骤。
附图说明
通过结合附图阅读下述关于本公开的实施例的描述,本公开的上述及其它特征将变得更加清楚,并且将会更好地理解本公开,其中:
图1是挖掘机的侧视图,图示了挖掘机正在挖掘一区域并具有朝向挖掘机铲斗的末端设置以检测位于地下的对象的探地雷达;
图2是探地雷达的原理图,图示了所述雷达包括发射并检测位于地下的检测对象的发射天线和接收天线;
图3是包括由虚线显示的封装收发器天线的挖掘机铲斗齿的一部分的透视图;
图4是图3的封装天线的金属化层的平面图;
图5是安装在挖掘机铲斗上的图3的天线的视图;
图6A是由图2的天线检测到的信号的图形表达,其中发射天线和接收天线位于由土壤构成的地面上方;
图6B是类似于图6A的视图,其中显示了由天线检测到的信号,其中发射天线和接收天线被设置成与地面接触,并示出了指示位于地下的塑料管道的峰值;
图7A是由图3的天线检测到的信号的图形表达,其中发射天线和接收天线设置由沙土构成的地面上方且在沙土中没有对象;
图7B是类似于图7A的视图,显示了由天线检测到的信号,其中发射天线和接收天线被设置成与地面接触,示出了指示位于沙地中的钢管的峰值;
图8A是由图3的天线检测到的信号的图形表达,其中发射天线和接收天线位于由沙土构成的地面上方且在沙土中没有对象;
图8B是类似于图8A的视图,其中示出了由天线检测到的信号,其中发射天线和接收天线被设置成与地面接触,并示出了指示位于沙土中的聚乙烯管道的峰值;
图9A是由图3的天线检测到的信号的图形表达,其中土壤中没有对象;
图9B是类似于图9A的视图,示出了在钢管位于土壤中大约6英寸(152毫米)深的情况下检测到的信号的图形表达;
图9C是类似于图9A的视图,其中示出了在钢管位于土壤中大约10英寸(254毫米)深的情况下检测到的信号的图形表达;
图10是示例性的铲斗齿的透视图,其中示出了包括四个盘锥形天线和维瓦尔第天线的齿;
图11是图10的铲斗齿的端视图;
图12是盘锥形天线的阵列的端视图;
图13是盘锥形天线阵列的组合的俯视图;
图14是显示上面安装有盘锥形天线阵列的挖掘机铲斗的视图;
图15A是在两个对象位于地底下的情况下由被定位成与地面接触的天线阵列的第一检测器检测到的信号的图形表达;
图15B是类似于图15A的视图,其中示出了在两个对象位于地底下的情况下由被定位成与地面接触的天线阵列的收发器发射并检测到的信号的图形表达;
图15C是类似于图15A的视图,其中示出了在两个对象位于地底下的情况下由被定位成与地面接触的天线阵列中的第二检测器检测到的信号的图形表达;
图16A是在图15A和15B中所示的信号的相关性的图形表达;
图16B是图15A和15C中所示的信号的相关性的图形表达;
图16C是图15B和15C中所示的信号的相关性的图形表达;
图17A是显示了基于图15A和15B的相关性信号的掩埋对象的可能位置的示例性的双曲线;
图17B是显示了基于图15A和15C的相关性信号的掩埋对象的可能位置的示例性的双曲线;
图17C是显示了基于图15B和15C的相关性信号的掩埋对象的可能位置的示例性的双曲线;
图18是显示两个掩埋对象的估算位置的被叠加的图17A-17C的双曲线的视图;
图19A是在发射天线和接收天线位于地面上方的情况下通过图2的对象检测系统检测到的信号的示例性的图形表达;以及
图19B是类似于图19A的视图,其中显示了在发射天线和接收天线被定位成与地面接触的情况下通过对象检测系统检测到的信号。
在所有附图中相应的附图标记表示相应的部件。这里所述的示例是本公开的示例性实施例,并且这些示例不应被理解为以任何方式限制本公开的保护范围。
具体实施方式
以下公开的实施例不旨在将本公开穷举或限制到以下详细说明中所公开的精确形式。相反,实施例的描述是为了使本领域技术人员可以使用其教导。
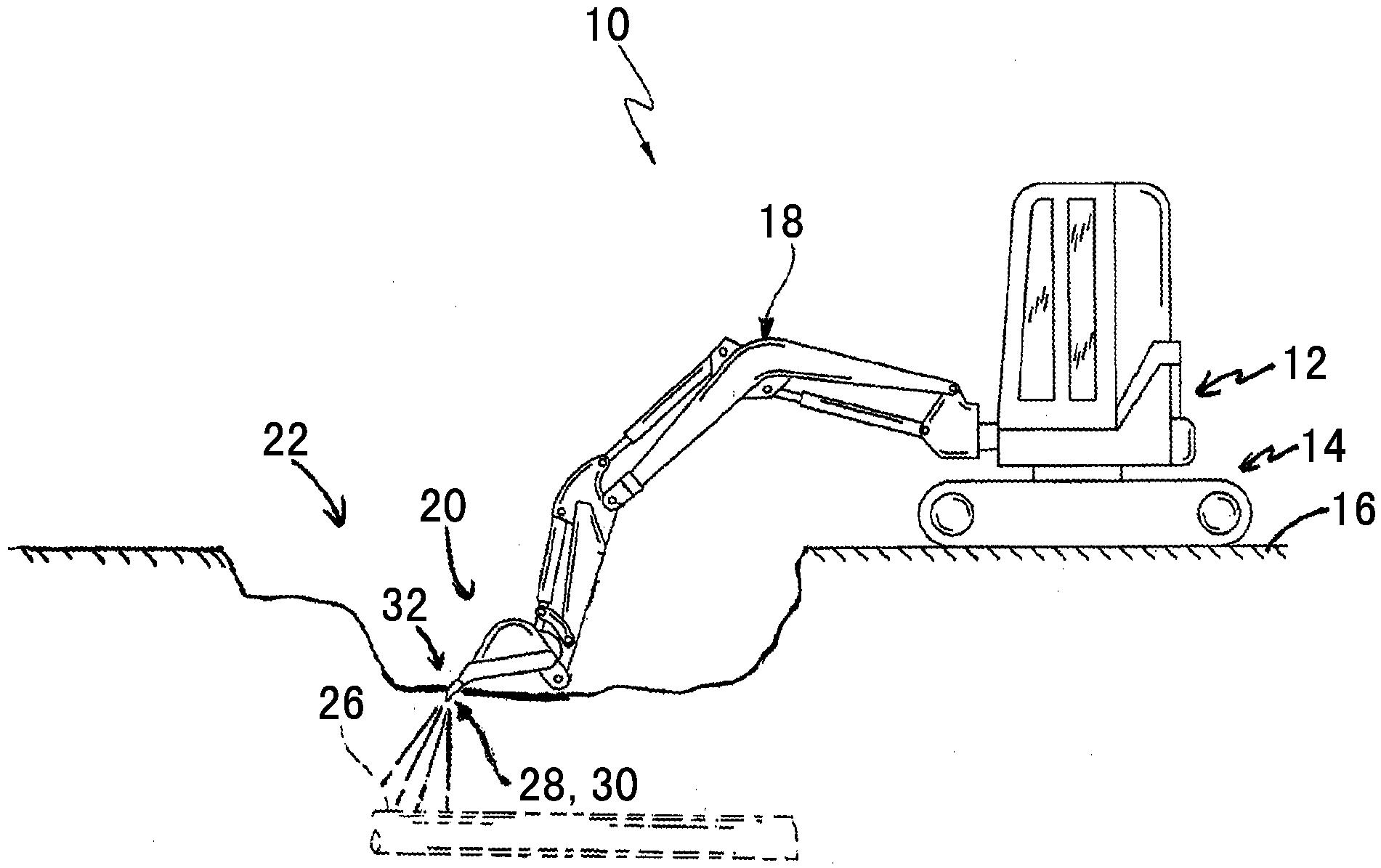
图1显示了挖掘机10,该挖掘机10包括底盘12和用于在地面16上支撑和推进底盘12的多个牵引装置14,诸如履带。挖掘机10还包括支撑作业工具或铲斗20的悬臂18,所述作业工具或铲斗20被构造成穿透地面16以在地面16中形成沟、孔、坑、或其它凹陷22。挖掘机10还包括图2中所示的对象检测雷达系统24,所述对象检测雷达系统24被构造成检测地地面16以下的诸如公共事业管道和线缆的对象26。虽然在本申请中在图1中显示并论述了挖掘机10,但是诸如锄耕机、装载机、推土机、平地机等的其它建筑车辆也可以设有对象检测系统24。进一步地,虽然牵引装置14被显示为履带,但是诸如车轮的其它牵引装置可以设置在建筑车辆10上。
对象检测雷达系统24的多个部分安装在铲斗20上。根据本公开的优选实施例,检测系统24包括安装在铲斗20上的发射器28和/或接收器/检测器30。例如,根据图1所示的实施例,发射器28和检测器30安装在铲斗20的一个或多个齿32上。发射器28和检测器30也可以安装在其它建筑设备作业工具上,诸如推土机或平地机刮板、装载机或锄耕机铲斗或其它作业工具。
通过安装在齿32上的发射器28和检测器30,发射器28和检测器30在凹陷22的挖掘过程中与地面16直接接触。通过将发射器28和检测器30设置成与地面16直接接触,减少了在探地信号的通信过程中转换器与地面16之间的信号损失。
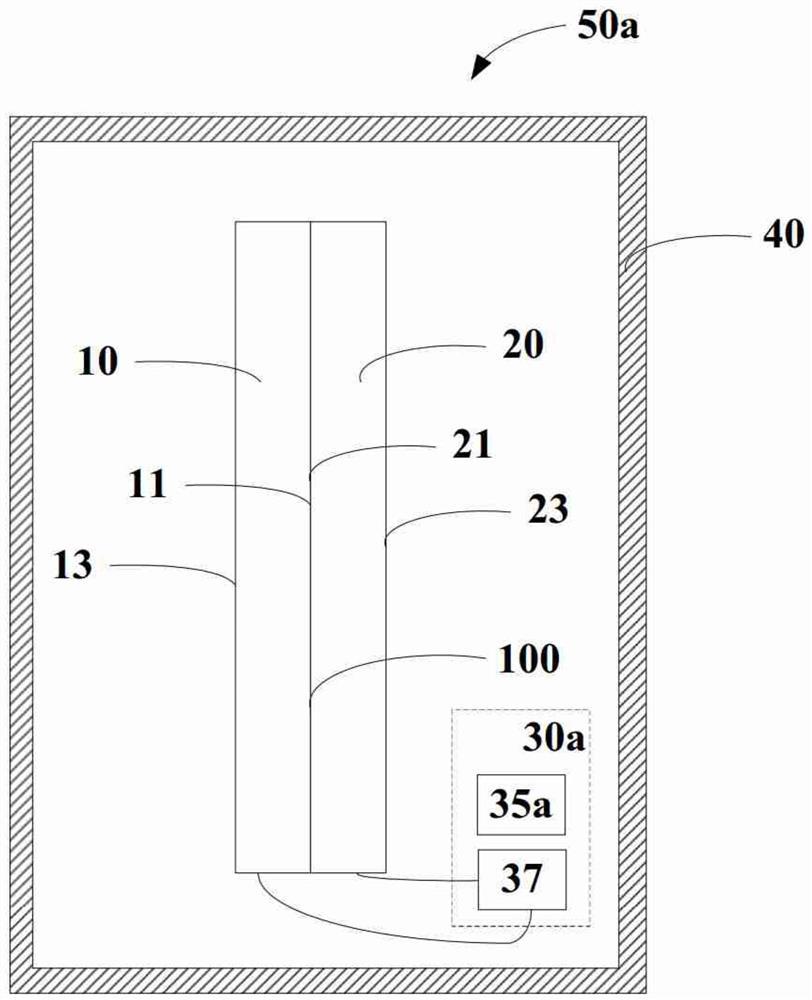
发射器28被构造成发射电磁波,而接收器30被构造成检测电磁波。在一个实施例中,发射器28和检测器/接收器30使用超宽带(UWB)通信。如图2所示,检测系统24包括诸如4500D型微微秒脉冲实验室发生器(Picosecond Pulse Labs Generator Model4500D)的信号发生器34和诸如DSA8200型泰克示波器(Tektronix Oscilloscope Model DSA8200)的信号检测监测器36。信号发生器34向将探地信号发射到地面16中的发射器28提供信号,并将触发信号提供给监测器36。诸如管道之类的对象26反射探地信号并且检测器30检测从对象26反射的信号。监测器36提供用于视觉分析的反射信号的视觉表示。具有处理器39的计算机37也可以用于分析由检测器30提供的信号。
发射器28和检测器30的一个实施例在图3中被图示为对极维瓦尔第(Vivaldi)天线。发射器28和检测器30中的每一个都包括维瓦尔第天线40和封装天线40的物体42。天线40是检测电磁波/将电磁波转换成可用于进行分析的信号的电磁转换器。如下所述,根据本公开还可以使用其它类型的天线以及其它转换器。
在制造天线/转换器40之后,天线/转换器40被封闭在形成物体42的一种或多种材料中以提供包围天线40的保护壳体或外壳。如图3所示,物体42示意性地包括基端66和与基端66相对的切削端。切削端68被示意性地显示为比基端66宽,然而,可以提供物体42的其它结构。联接在物体42的基端66处的电缆48提供天线40与信号发生器34(图2)之间的电连接。如图5所示,如这里所述,切削端68包括切削刃50。
根据本公开的优选实施例,图3的物体42由高强度电介质制成。介电材料可以是可以聚合物或陶瓷材料,所述聚合物或陶瓷材料可以包括例如用于增强物体42的耐用性的诸如微纤维或纳米纤维的纤维增强材料。例如,根据一个实施例,物体42由具有大约为4的介电常数的高模量聚脲制成。其它示例性材料包括硬质聚氨酯、环氧树脂、其它塑性塑料或热固性材料、以及其它非导电材料。物体42可以还被涂有增加其耐用性和/或它耐磨性的材料。物体42还可以被涂有碳或其它电磁绝缘材料以使天线40与相邻导电表面绝缘,从而减少或防止信号泄漏、回响、或其它干扰。优选地,电介质具有大约等于地面16的介电常数。根据本公开,电介质具有范围从从大约1至约20的介电常数,但是可以具有其它值。在一个实施例中,电介质用于在天线40与地面16之间的信号通信过程中减少信号损失。
在一个实施例中,物体42绕插入件被模制以形成用于容纳天线40的凹穴。例如,参见图3中所示的插入件49。插入件49包括被设定尺寸以容纳天线40的内部区域。在绕插入件49模制物体42的介电材料之后,天线40可以在辅助组装操作中插入插入件49的内部区域内。可替换地,在绕插入件49模制物体42之前可以将天线40固定在插入件49内。在一个示例中,物体42由绕插入件49形成的铸造聚氨酯形成。其它类型的热固性或热塑性材料和工艺可以用于绕插入件49模制物体42。在一个实施例中,插入件49由具有类似于物体42的介电特性的高强度介电材料构成。在一个实施例中,插入件49由绕天线40的能够提供高强度壳体结构的硬质塑料或其它聚合物材料构成。天线40在被固定在插入件49中之前可以被预先组装,或可以被组装在插入件49内。诸如插入件49的插入件结构可以用于容纳其它类型的天线或天线阵列,如图10-11中所示和这里所述的盘锥形(discone)天线40′。
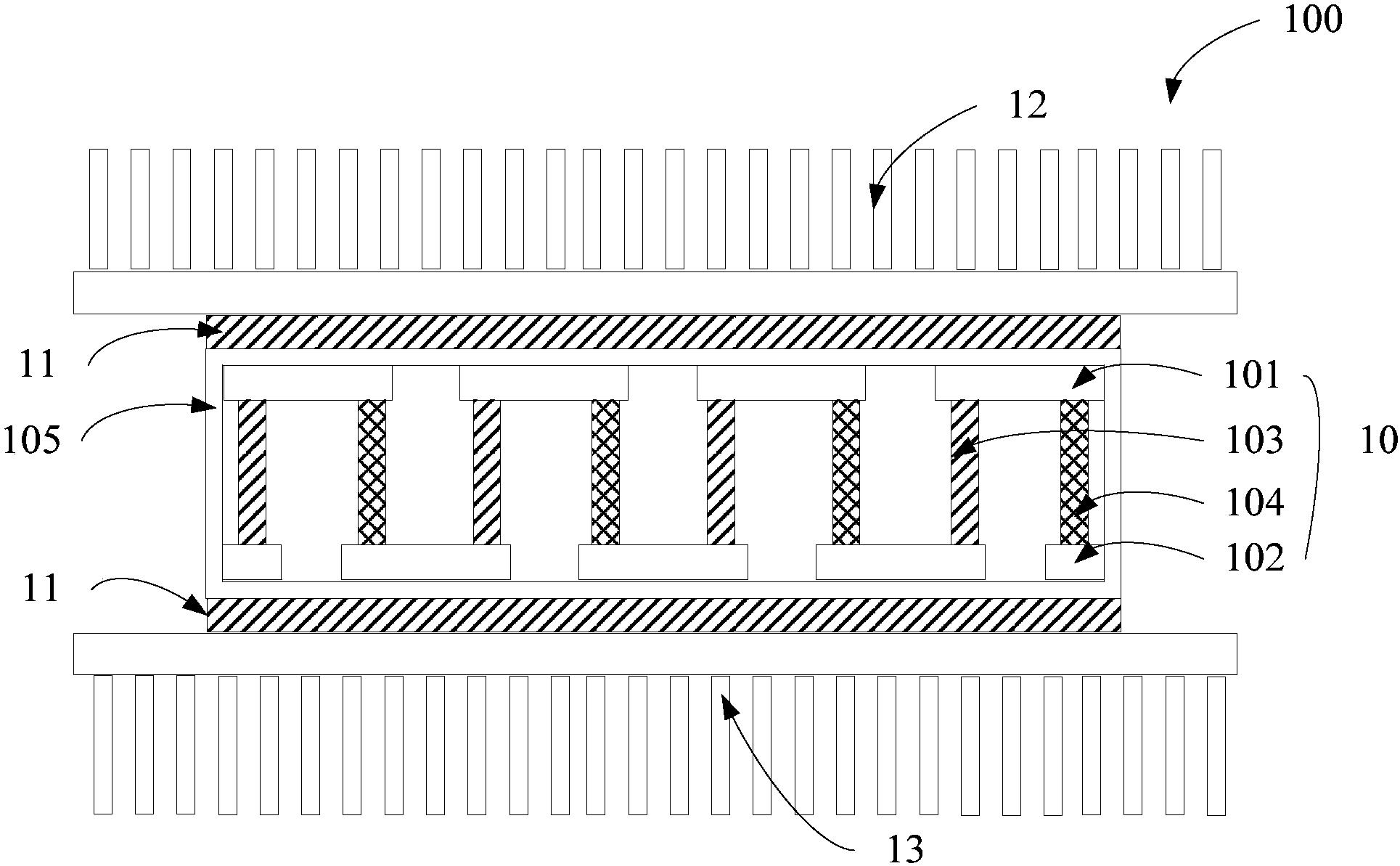
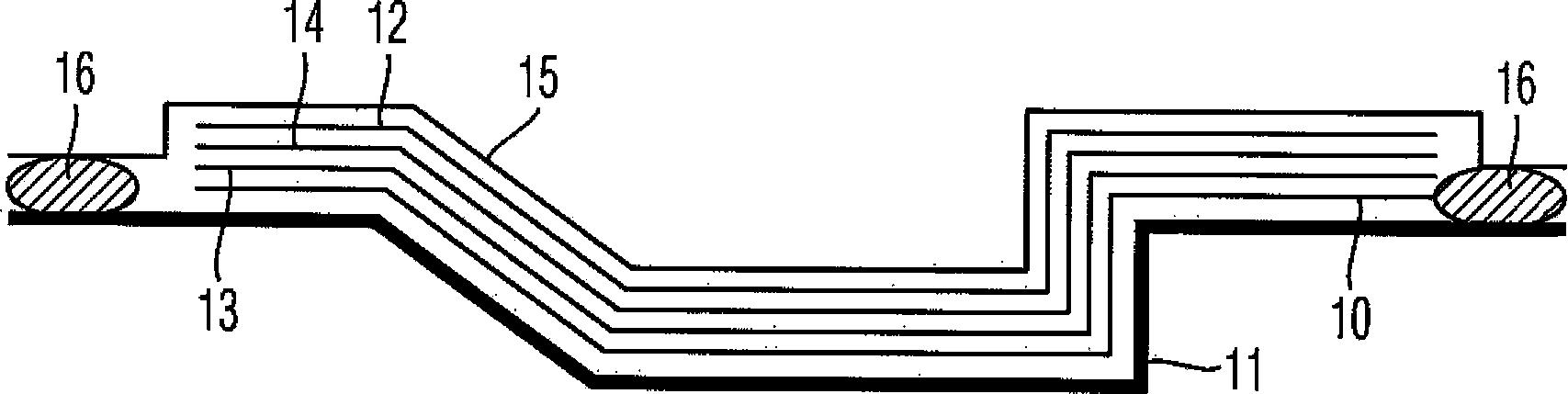
如图3和图4所示,天线40包括具有三个材料平面,所述材料平面包括上地线板44和下地线板44,且导电板46被夹在所述地线板44之间。在图4中用虚线显示了直接定位在地线板44之间的导电板46的多个部分。导电板46优选地由铜制成,但是可以由其它金属及其它导电材料制成。介电/接地板46可以由环氧树脂、陶瓷、 聚四氟乙烯(PTFE)或其它材料制成。在一个实施例中,如图4所示,天线40约为135毫米(5.2英寸)长并且约45毫米(1.8英寸)高。
在操作中,天线/转换器40和物体42被安装或以其它方式联接到图5所示的齿32。在一个实施例中,柄支架用于将物体42联接到齿32。来自信号发生器34的信号通过电缆48被提供给天线40。在挖掘期间,如图1所示,当挖掘污物及其它材料时,天线40和物体42在地面16中被重复地定位。因此,天线40通常定位在履带14的最低部的下方。进一步地,天线40被定位在由挖掘机10在挖掘过程中产生的诸如凹陷22的穿透区中。如图1所示,当齿32在土地16中产生穿透区时,发射器28和检测器30的天线40被同时定位在土地16中。在一个实施例中,天线40联接到铲斗20的每一个齿32。在一个实施例中,发射器28和多个探测器30联接到铲斗20的齿32。
当被定位在穿透区中时,通过发射器28和检测器30的天线40发射信号并检测信号。因为天线40和介电体42安装在齿32上,因此天线40和介电体42协作以限定齿32的切削元件,且介电体42的多个部分限定齿32的切削刃50。因此,在挖掘的同时检测对象26。进一步地,因为介电体42和天线40能够被降低到穿透区22中并有助于产生穿透区22,因此与在任何开始挖掘之前试图检测对象26的情况相比,对象26更靠近天线40并被更加容易地检测到。在一个实施例中,介电体42定位在天线40与土壤之间以在挖掘期间保护天线40。因此,在相应的信号发射和反射信号的接收期间,天线40通过穿过介电体42的路径发射和接收信号。
图6A-9C提供了来自探测器30的输出的示例。在图6A中,显示了当发射器28和检测器30的天线/转换器40定位在地面16上方且在相应天线40与地面16之间没有直接接触时的信号。所示的峰值52表示发射器28的天线40与检测器30的天线40之间的串扰。在图6B中,相应的发射器28和检测器30的天线被设置成与地面16直接接触。除了示出串扰峰值52之外,还示出了第二峰值54,该第二峰值54表示存在掩埋在受测土壤中4英寸(102毫米)深处的2英寸(51毫米)直径的聚乙烯管。因此,可提供表示诸如塑料天然气管道的对象26在铲斗20的路径中的可察觉的指示。挖掘机10的经过培训的操作者可以注意到该指示以避免毁坏管道26。类似地,计算机37可以被编程以识别在串扰峰值52之后的满足诸如斜率的预定特征的任何峰值。如果计算机37检测到这种峰值、或其它预定特征,则计算机可以发送报警、停止铲斗20的进一步移动,或以其它方式试图避免铲斗20碰撞管道26。
除了检测对象26之外,由检测器30检测到的反射还可以用于确定掩埋在地面16内的对象26的特征。例如,图7A和7B示出了对于掩埋在沙地中4英寸(102毫米)深度的2英寸(51毫米)的金属管道而言的检测器30的输出。在图7A,发射器28和检测器30的天线/转换器40位于地面16上方。在图7B中,发射器28和检测器30的天线40与地面直接接触,并提供指示金属管道的带区别特性的“连笔书写的V”形图案53。图8A和8B示出了对于在沙地中掩埋在2英寸(51毫米)深度处的1英寸(25毫米)的聚乙烯管道而言的检测器30的输出。在图8A中,发射器28和检测器30的天线40在地面16上方。在图8B中,发射器28和检测器30的天线40与地面直接接触并提供指示塑料管道的带区别特性的“w”图案55。挖掘机10的经过培训操作者可以注意到金属、聚乙烯以及其它管道的区别性图案53、55以确定管道的类型。类似地,计算机37可以被编程以识别在串扰峰值52之后的满足诸如图案53、55的形状的预定特征的任何峰值。如果计算机37检测到这种图案、或其它预定特征,计算机37可以发送诸如金属或塑料的管道类型的指示。
除了确定对象26的存在和类型之外,由检测器30检测到的反射还可以用于确定对象26与铲斗20(或挖掘机10的任何其它部分)的距离。在图9A-9C中提供了由检测器30检测到的反射的另外的表现形式。在图9A中,没有对象26被放在受测土壤中,因此使得当天线40被设置成与地面16接触时,没有检测到对象26。在图9B中,2英寸(51毫米)直径的钢管被埋在沙土内6英寸(152毫米)深度处,并且在图9C中,相同的管道放置在沙土内10英寸(254毫米)深度处。如由图9B和9C中的圆形区域所示,钢管的“连笔书写的v”图案53在图9B中出现的时间晚于图9C,这是因为在由发射器28发送之后反射花费较长时间到达检测器30。挖掘机10的经过培训的操作者可以注意到诸如串扰峰值52的特征与区别图案53之间在时间上的差距以确定与对象26的距离。类似地,计算机37可以被编程以识别该时间延迟并计算铲斗20的齿32与对象26的距离并向操作者提供关于距离的指示和/或使用所述距离作为报警或其它方式的触发器。操作者在诸如已知共用事业管道或电缆的对象26周围执行精细移动时可以使用该距离信息。
图10和图11显示了发射器28′和探测器30′的另一个实施例,所述发射器28′和探测器30′包括用作检测器30′的四个盘锥形天线/转换器40和用作发射器28′的维瓦尔第对极天线40。组合的发射器/检测器56包括以与本文描述物体42类似的方式封装天线40、40′的物体42′。示例性物体42′包括可从John Deere公司获得的Swampers铲斗齿。如果盘锥形天线40′被用作发射器,那么为了增强盘锥形天线40′的方向性,如图12所示,天线40′可以排列成阵列58。为了进一步提高天线40′的方向性,阵列反射器可以设置在阵列58的后方。在一个实施例中,诸如图13中所示的板60的反射金属板例如放置在阵列58的后面。在一个实施例中,阵列反射器定位在阵列58后大约6毫米与8毫米之间的位置,当然其它适当的距离也是可以的。
在图13中,具有盘锥形天线40′的多个阵列58被设置成用于检测对象26的检测器和发射器。在所示的实施例中,阵列58具有不同数量的盘锥形天线40′。如图14所示,阵列58可以放置在铲斗20上除了齿32之外的位置。例如,阵列58可以被安装到铲斗20的边缘附近的侧壁62或前壁64上,当然,阵列58也可以被设置在其它适当的位置。在一个实施例中,盘锥形天线40′嵌入在诸如介电屏蔽体或壳体的电介质中。在所示的实施例中,电介质具有大约为4或5的介电常数。在一个实施例中,电介质可以具有在大约1至20的范围内的介电常数,但是可以具有其它值。
如这里所述的,图2的对象检测系统24可以包括发射探地信号的发射器28和检测探地信号从一个或多个掩埋对象26反射的多个探测器30。例如,图5的铲斗20可以包括安装到齿32的至少一个发射器/收发器28和多个探测器30。类似地,图13-14的阵列58可以包括发射器/收发器28和多个探测器30。在一个实施例中,对象检测系统24包括至少三个探测器/接收器30。
图15A-15C提供对象检测系统24中的多个检测器30的示例性输出。在图15A-15C中,图2的收发器28和两个检测器30被设置成与地面接触以检测位于地底下的两个对象。收发器28被设置在两个检测器30之间,当然也可以提供其它的天线布置。图15A的信号对应于第一检测器30,图15B的信号对应于收发器28,图15C的信号对应于第二检测器30。收发器28提供如由图15B的脉冲70表示的探地信号。在检测到图15A和15C的峰值74和76所示的串扰之后,每个检测器30检测来自两个对象中的每一个的反射。由于具体的检测器30相对于收发器28和掩埋对象的位置和间距,因此每一个检测器30在不同的时刻检测到来自对象的反射。图15A的峰值78表示由第一检测器30接收到的来自第一对象的反射,图15C的峰值80表示随后由第二检测器30接收到的来自第一对象的反射。类似地,在图15A中,峰值82表示由第一检测器30接收到的来自第二对象反射,而图15C的峰值84表示之前由第二检测器30接收到的来自第二对象的反射。在所示的实施例中,收发器28也检测来自掩埋对象的反射,如由图15B中的峰值86表示。
如图15A-15C所示,由每一个检测器30检测到的反射具有不同的幅值、到达时间、曲线特征、及其可以被分析以确定被检测对象的位置及诸如尺寸或类型等其它特征的其它特性。计算机37的信号处理器39可以被编程以分析由检测器30和收发器28检测到的反射信号,从而确定被检测对象的位置及其它特征。
在一个实施例中,到达时间差(TDOA)方法被用于确定被检测对象的相对位置。在TDOA方法中,处理器39计算在天线阵列中的不同接收器处的反射信号的到达时间的差值。在所示的实施例中,通过计算在不同接收器处测得的信号反射的成对的相关性确定这些时间延迟,并根据计算出的时间延迟和土壤的介电特性,确定目标对象(在二维或三维空间中)的相对位置。来自两个不同接收器的两个信号反射之间的相关性可以被表示为:
其中S1是在第一天线处检测到的信号反射,S2是在第二天线处检测到的信号反射,而τ是两个信号之间的时间延迟。反射信号的到达时间差对应于反射信号的相关性中的峰值或最大值。通过使用图15A-15C的示例性信号,上述计算出的相关性函数(1)的示例性最大值或峰值在图16A-16C中被示出。图16A中所示的最大值100表示在第一检测器30和收发器28处接收到的反射信号之间的时间延迟。图16B中所示的最大值102表示在第一检测器30和第二检测器30处接收到的反射信号之间的时间延迟。图16C中所示的最大值104表示在收发器28和第二检测器30处接收到的反射信号之间的时间延迟。
基于每对接收器的相关性函数(1)在二维空间中确定目标对象的位置。例如,可以通过求解以下方程确定对象在二维空间中的位置:
其中(x,y)是目标的坐标,(Xi,Yi)和(Xj,Yj)是收发器28和/或接收器30的坐标,而dij是通过传播时间差和信号传播速度确定的目标距离差。
由相关性函数(1)确定的信号反射的到达时间差被用于限定用于每对接收器的相关的信号的双曲线。具体地,图16A-16C中所示的每一个峰值或最大值被用于计算每对接收器的双曲线。每一个得到的双曲线表示可能存在一个或多个目标对象的估算区域。双曲线的密度和宽度基于相关性函数(1)的最大值(峰值)的高度和宽度。因此,相关性函数(1)中较大的峰值产生更大密度和宽度的双曲线。通过重叠来自每对接收器的双曲线并识别双曲线相交的高密度区域来确定目标对象的位置。因此,较密集且较宽的双曲线提供关于(一个或多个)被检测对象的位置的更多的指示。例如,参见在图17A-17C中单独示出且在图18中重叠的双曲线150-154。图17A-17C的双曲线150-154中的每一个都表示可能存在一个或多个对象的区域。图17A中所示的双曲线150基于在第一检测器30和收发器28处接收到的反射信号的到达时间差(即,基于图16A的最大值100)。图17B中所示的双曲线152基于在第一检测器30与第二检测器30之间的反射信号的到达时间差(即,基于图16B的最大值102)。图17C所示的双曲线154基于在收发器28与第二检测器30之间的反射信号的到达时间差(即,基于图16C的最大值104)。
图17A-17C的双曲线在图18中被有层次地示出。两个被检测对象的估算位置对应于双曲线相交处的高密度区域156、158。如图所示,区域156表示一个相应的对象位于收发器28前方约35cm处且位于收发器28左侧约2cm处。区域158表示相应的第二对象位于收发器28前方约30cm处且位于收发器28右侧约5cm处。在一个实施例中,图18中所确定的估算对象的位置是通过以大约1微微秒的时间间隔对反射信号进行取样而获得的。
目标对象在三维空间中的位置还基于每对接收器的相关性函数(1)。对象在三维空间中的位置可以通过在公式(2)导入第三坐标()来确定,所形成的方程(3)如下:
其中(x,y,z)是目标的坐标系,(Xi,Yi,Zi)和(Xj,Yj,Zj)是收发器28和/或接收器30的坐标,而dij是由传播时间差和信号传播速度确定的目标距离差。在所示的实施例中,在通过使用TDOA方法确定对象的三维位置时,需要通过使用最少三个检测器30对来自对象的信号反射进行检测。在一个实施例中,为了确定(一个或多个)对象的三维位置,收发器28和接收器30的天线没有位于同一条线上,即,天线的对准在一定程度上被偏移。
土壤介电特性的知识可以进一步用于确定被检测对象的位置。例如,对象与接收器的距离r与信号的到达时间t(根据上文所述的方法计算)和信号传播通过地面的速度v的关系如下述方程所示:
r=vt (4)
信号在地下传播的速度v取决于地面或土壤的介电特性,其由以下公式表示:
其中,ε是地面的介电特性,而c是光在真空中的速度。如果已知土壤的介电特性ε,那么通过公式(5)可以确定信号在土壤中的速度v。这样,可以通过公式(4)、基于计算出的速度v和在收发器28和接收器30处测得的到达时间t确定对象的距离r。在一个实施例中,如本文所述,可基于接收器之间的串扰信号确定地面的介电特性ε。
还可以使用检测对象26(图1)的位置的其它方法,例如已知的方法包括到达时间(TOA)方法、往返时间(RTOF)方法、到达角度(AOA)方法、和接收信号强度(RSS)方法。
再次参照图1-2,当发射器28位于地面16上方时,由发射器28提供的信号可能会与附近其它的射频装置相互干扰。为了降低信号干扰的风险,当发射器28的天线40在地面16上方操作时,限制由发射器提供的信号的幅值和频率。在一些地区,例如联邦通信委员的条例机构可能通过对超宽带信号或其它类型信号的可用带宽和功率密度设置限制而在探地雷达通信施加约束。在一个实施例中,发射器28和检测器30当定位在地面16上方时在约3.1GHz至10.6GHz的范围内操作。
通过将发射器28和检测器30的天线40设置成与地面接触,能够降低与附近其它射频装置的信号发生干扰的风险。进一步地,政府规则可能会对地下射频或超宽带信号通信进行较少的约束或不可适用。因此,当发射器28和检测器30的天线40与地面接触时,可以增加由发射器28提供的信号的幅值和频率,从而使产生的信号具有更大的穿透深度。结果,可通过对象检测系统24检测到距离发射器28和检测器30的更大距离或深度处的对象。通过提高检测能力,对象检测系统24在检测对象时能够提供更多的预先警告以允许避开检测对象。例如,所产生的信号的增加的穿透深度提供用于信号处理和供操作者或控制系统作出反应以避开被检测对象的额外的时间。
在所示的实施例中,在发射器28与检测器30之间的串扰或信号耦合用于确定发射器28是否与地面接触,从而可以增加产生的信号的功率和/或脉冲持续时间。在发射器28和检测器30的天线邻近时,从发射器28发射的一些辐射能量未经目标对象反射的情况下被检测器30的天线直接接收到,从而导致在检测器30处检测到串扰。发送天线40与接收天线40之间的土壤或其它地面介质干扰由接收天线40检测到的串扰。例如,土壤的干扰可能会导致串扰信号的幅值减小、相变、斜率变化、或其它特性变化。因此,相邻或紧邻安装的发射天线和接收天线40之间的串扰信号电平或符号的动态变化可以用于检测发射器28和检测器30的天线40何时与土壤或地面接触。进一步地,当发射器28被设置成与地面接触时,由于地面干扰,串扰信号可能会后到达检测器30。
参照图19A和19B,峰值90和92示出了在通过发射器28发射信号脉冲之后检测器30与发射器28之间的串扰。在图19A中,发射器28和检测器30的天线/转换器40设置在地面16的上方,各个天线40与地面16之间不直接接触。在图19B中,相应发射器28和检测器30的天线40被设置成与地面16直接接触。如图所示,图19A中的串扰峰值90的斜坡比图19B中的串扰峰值92的斜坡更陡。类似地,串扰峰值90的幅值大于串扰峰值92的幅值,这表明当发射器28和检测器30的天线40被设置在地下时串扰效果的减少。在一个实施例中,在生成探地信号脉冲之后串扰信号在检测器30处的到达时间根据发射器28和检测器30的天线40是否位于地下而变化。具体地,发射器28和检测器30的天线40之间存在的土壤将导致在通过发射器28发射信号脉冲之后串扰信号到达检测器30的延迟。因此,反射信号传递串扰峰值的特征和/或时间延迟提供了关于发射器28和检测器30的天线40是否与地面接触的可察觉的指示。
基于在发射器28与检测器30之间检测到的串扰响应,一旦检测到发射器28和检测器30接触地面,就可以自动调节从发射器28发射的信号的功率水平、脉冲宽度、和/或波长。在一个实施例中,计算机37的处理器39分析通过检测器30检测到的信号的串扰响应并且一旦检测到发射器28与地面接触就启动控制事件。基于由处理器39提供的控制事件,信号发生器34可以自动增加来自发射器28的探地脉冲的幅值和/或频率。在一个实施例中,计算机37包括模数(A/D)转换器35(参见图2),该模数转换器35向处理器39提供代表用检测器30检测到的串扰的幅值的数字输出。基于A/D转换器35的输出的幅值或时间延迟,处理器39确定发射器28和检测器30何时被设置地面中并使信号发生器34增加由发射器28提供的探地信号的功率和/或频率。
在一个实施例中,由处理器39提供的控制事件可以使操作者能够或提示操作者手动地增加所产生的信号脉冲的幅值和/或频率。例如,检测系统24可以为操作者提供关于发射器28和/或检测器30与地面接触的音频或可视指示。在一个实施例中,监测器36可以提供反射信号的直观表示以供操作者进行直观分析。一旦观察到反射信号的串扰峰值的特征变化,操作者可以手动增加所发射的信号的功率和/或频率以增加发射信号的穿透深度。
在一个实施例中,一旦检测到发射器28和/或检测器30的天线40接触地面,可以改变由发射器28提供的探地信号的其它特征。示例性的特征包括信号的方向性、脉冲持续时间、或其它信号电平或与符号相关的特征。
通过检测器30检测到的串扰响应还可用于确定发射器28和检测器30周围的土壤、聚结物、或其它地面物质的介电特性。在一个实施例中,当天线40被设置成与地面接触时,基于在通过发射器28发射信号脉冲之后串扰信号到达检测器30的时间确定土壤的介电特性。具体地,基于发射器28和检测器30的天线40之间的已知距离和通过发射器28发射信号脉冲与通过检测器30检测到串扰之间的时间估算地面的介电特性。例如,使用上述方程(4),通过已知两个天线40之间的距离r并测量通过发射器28发射信号脉冲与通过检测器30检测到串扰之间的时间t,可以确定信号速度v。通过将所确定的速度v代入公式(5)中,可以确定周围地面物质的介电特性ε。可替换地,串扰峰值(例如图19B的串扰峰值92)的幅值和/或斜率例如还可以用于估算土壤或地面的介电特性。如本文所述,地面物质的介电特性可用于计算目标对象的位置。例如,到达时间差(TDOA)方法基于周围地面或土壤的介电特性以及其他参数计算对象26的相对位置。通过分析发射器28与检测器30之间的串扰,可确定土壤的介电特性并在计算对象26的位置时考虑所述介电特性。
虽然已经描述了具有优选设计的本发明,但是在本公开的精神和保护范围内可以进一步修改本发明。因此,本申请旨在涵盖使用其基本原理的本公开的任意改变、使用或改进。此外,本申请旨在涵盖本发明所属的技术领域中的并落入所附权利要求的范围内的不同于本公开的这种改变。
使用天线串扰进行探地雷达通信的系统和方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0