









专利摘要
本发明涉及一种电驱动铰接式全地形履带车的无液压转向铰接机构,属于全地形履带车的部件。转角保持器控制阀连接转角保持器油缸,电动机带动液压泵转动,液压泵连接液压油箱与俯仰控制阀;俯仰控制阀连接俯仰油;铰接支座与俯仰架相连,俯仰油缸连接铰接支座与俯仰架,俯仰架与扭转架相连,转角保持器油缸左右两侧对称布置,与俯仰架和扭转架相连,扭转架与连接盘相连。优点是:大幅降低了液压系统的功率消耗,延长了液压系统零部件寿命,降低整车质量,大幅提升了车辆的可靠性,驾驶员可以更容易掌握车辆运行姿态,不会阻滞感,提高操控性,车辆续航里程,提升了车辆在直线行驶和保持转向过程中的稳定性。
权利要求
1.一种电驱动铰接式全地形履带车的无液压转向铰接机构,铰接支座与俯仰架相连,在连接轴线处构成俯仰转动副,俯仰油缸连接铰接支座与俯仰架,通过改变俯仰油缸的长度来改变铰接支座与俯仰架之间的角度,俯仰架与扭转架相连,在连接轴线处构成转向转动副,扭转架与连接盘相连,在连接轴线处构成扭转转动副,其特征在于:转角保持器控制阀连接转角保持器油缸,控制其油路开闭,油罐与转角保持器控制阀相连,为转角保持器油缸补充油液,电动机带动液压泵转动,为液压系统供能;液压泵连接液压油箱与俯仰控制阀;俯仰控制阀连接俯仰油缸,控制其伸缩;铰接支座、俯仰油缸、俯仰架、扭转架、转角保持器油缸及连接盘构成运动机构,转角保持器油缸左右两侧对称布置,两端分别与俯仰架和扭转架相连,用来保持俯仰架与扭转架之间的夹角。
2.根据权利要求1所述的一种电驱动铰接式全地形履带车的无液压转向铰接机构,其特征在于:角度传感器安装在俯仰架与扭转架的安装轴上部,用来测量俯仰架与扭转架的相对转动角度,该角度等于前车与后车之间的转向夹角。
3.根据权利要求1所述的一种电驱动铰接式全地形履带车的无液压转向铰接机构,其特征在于:所述铰接支座用于与前车后部相连,与前车运动保持一致。
4.根据权利要求1所述的一种电驱动铰接式全地形履带车的无液压转向铰接机构,其特征在于:所述连接盘用于与后车前部相连,与后车运动保持一致。
说明书
技术领域
本发明属于全地形履带车的部件,尤其是指一种铰接式全地形履带车的转向铰接机构。
背景技术
铰接式全地形履带车通常由2节车厢组成,中间使用铰接机构连接。每节车厢有2条履带,发动机布置于前车,为前车提供动力,并通过分动箱、传动轴驱动后车。通过液压缸作用于铰接机构,使得前后车之间有转向、俯仰2个可控自由度,以及扭转的随动自由度。这使得铰接式全地形履带车在复杂地形仍然具有良好的通过能力。我国国土面积辽阔,地形复杂,存在大面积的沙漠、雪地、丛林、山地,其间也有沟壑、河流等极端地形,运输或通勤难以使用常规轮式或履带越野车辆。为解决此类问题,铰接式全地形履带车应运而生。近年来,随着全球气候变化,地震、暴雨雪等异常灾害频繁发生,抢险救灾工作面临严峻挑战,对于铰接式全地形车的改进与升级更显重要。
国外研究铰接式全地形履带车起步较早,其中最具代表性的有瑞典赫格隆公司的Bv系列、俄罗斯伊希姆拜运输机械制造厂的DT系列以及新加坡技术动力公司的Bronco系列。国内全地铰接式形履带车研究较晚,但也开发出多种型号的铰接式全地形履带车,具有代表性的有MSM公司的“蟒式”系列、与詹阳动力的“全地虎”系列。现有的铰接式全地形履带车转向原理与常规履带车辆不同,常规履带车辆由左右履带不同速度产生转向力矩使车辆转向,而铰接式全地形履带车由铰接机构的液压缸提供转动力矩,该力矩作用于前后车,由地面作用于4条履带的反作用力的力矩平衡,反作用力传递至分动箱,使得4条履带以不同速度转动,从而使前后车形成夹角,前后车履带作用力方向不同,由此产生转向力矩,进而使整车转向。
中国专利《一种铰接履带车辆的三自由度铰接机构》CN105857392A公开了一种结构新颖、易于制造与维修的三自由度铰接机构;中国专利《一种全地形履带车辆的轻型铰接机构》CN106828602A公开了一种结构新颖的轻型铰接机构,轻量化效果显著。二者对铰接机构的结构进行了创新,但并未改变铰接式全地形履带车的转向原理,仍然通过液压缸改变前后车之间转向夹角,进行转向。
随着全球范围内科学技术的飞速发展,能源短缺与环境污染问题日益凸显。混合动力技术作为节能减排的方案之一,已经广泛应用于民用车辆与工程机械,其中油电混和动力已经日渐成熟。在此背景之下,铰接式全地形履带车的混合动力研究也逐渐提上日程。混合动力的铰接式全地形履带车由柴油机带动发电机产生电能,由4个电动机分别带动驱动轮,驱动4条履带。不同于现有使用分动箱的铰接式全地形履带车,电驱动的铰接式全地形履带车可以分别控制4条履带的驱动力。因此,通过前后2车分别产生反向转向力矩,已可以使前后车形成夹角。此时液压转向机构就会产生冗余,需要协调液压转向机构与履带的驱动力,这会增加控制系统的设计难度。同时,转向液压系统在转向时需要发动机提供能量,影响车辆转向时的性能。在弯道较多的道路中,由于转向频繁,液压系统温度升高较快,需要较大体积的油箱进行散热,这会占用车内空间,增加整车质量。可见,使用液压进行转向并不利于电驱动铰接式全地形履带车的设计。
发明内容
本发明提供一种电驱动铰接式全地形履带车的无液压转向铰接机构,目的是不使用液压缸进行转向的铰接机构,降低电驱动铰接式全地形履带车的结构与功能冗余,降低整车质量,同时提高车辆可靠性,增加车辆续航里程。
本发明采取的技术方案是:包括转角保持器控制阀、油罐、铰接支座、俯仰架、转角保持器油缸、扭转架、连接盘、俯仰油缸、俯仰控制阀、液压泵、液压油箱及电动机,其中:
所述转角保持器控制阀连接转角保持器油缸,控制其油路开闭,油罐与转角保持器控制阀相连,为转角保持器油缸补充油液,电动机带动液压泵转动,为液压系统供能;液压泵连接液压油箱与俯仰控制阀;俯仰控制阀连接俯仰油缸,控制其伸缩;
所述铰接支座、俯仰油缸、俯仰架、扭转架、转角保持器油缸及连接盘构成运动机构,铰接支座与俯仰架相连,在连接轴线处构成俯仰转动副,俯仰油缸连接铰接支座与俯仰架,通过改变俯仰油缸的长度来改变铰接支座与俯仰架之间的角度,俯仰架与扭转架相连,在连接轴线处构成转向转动副;转角保持器油缸左右两侧对称布置,两端分别与俯仰架和扭转架相连,用来保持俯仰架与扭转架之间的夹角;扭转架与连接盘相连,在连接轴线处构成扭转转动副。
本发明角度传感器安装在俯仰架与扭转架的安装轴上部,用来测量俯仰架与扭转架的相对转动角度,该角度等于前车与后车之间的转向夹角。
本发明所述铰接支座用于与前车后部相连,与前车运动保持一致。
本发明所述连接盘用于与后车前部相连,与后车运动保持一致。
本发明优点是:现有的铰接机构需要使用液压缸进行转向,由于全地形履带车时常需要转向,这使得液压系统需要持续工作,不仅会导致功率损耗,也会降低液压系统寿命。无液压转向铰接机构仅需在通过障碍、需要调整俯仰角度时使用液压系统,车辆越障频率较低,可以让液压系统按需启动,这大幅降低了液压系统的功率消耗,延长了液压系统零部件寿命。由于没有频繁转向时液压系统温度升高过快的问题,可以大幅度减小油箱体积,降低整车质量。同时,由于液压缸数量的减少,液压系统使用频率降低,大幅提升了车辆的可靠性。
现有的铰接机构没有角度传感器,需要驾驶员依靠经验判断前后车是否在同一直线,容易让驾驶员产生疲劳,在复杂路况下,驾驶员很难正确判断车辆状态。无液压转向铰接机构增加了角度传感器,可以通过测量铰接机构的旋转角度,测量出前后车之间的转向夹角,通过仪表可以给驾驶员直观的反馈,这使得驾驶员可以更容易掌握车辆运行姿态。
现有的铰接式全地形履带车使用液压缸使前后车之间形成转向夹角,车辆的惯性、地面的反作用力、分动箱及传动机构的机械阻力都会阻止这一趋势,不仅会导致能量的损耗,也会在转向过程中产生阻滞感,降低操控性。而使用无液压转向铰接机构的电驱动铰接式全地形履带车的转向力矩由履带直接作用于地面产生,避免能量在多次传递中损耗,不会阻滞感,从而提高操控性。
在电驱动铰接式全地形履带车上使用现有的铰接机构,会造成功能冗余,需要协调液压转向机构与履带的驱动力,增加了控制系统设计难度。使用无液压转向铰接机构可以削减冗余操纵机构,简化控制系统,有效提高能源利用率,提高车辆续航里程。
铰接式全地形履带车在保持转向过程中,随车辆速度与前后车转向夹角的不同,保持夹角所需扭矩也不同,这需要控制系统根据车辆速度与前后车转向夹角实时计算所需扭矩,增加了控制系统的复杂程度,也容易使前后车转向夹角产生抖动。无液压转向铰接机构使用了转角保持器,可以根据需要保持前后车之间的转向夹角,大幅度简化了驱动策略,提升了车辆在直线行驶和保持转向过程中的稳定性。
附图说明
图1是本发明的结构原理图;
图2是本发明运动机构的结构示意图;
图3是本发明车辆开始转向阶段受力及运动示意图;
图4是本发明车辆保持转向阶段受力及运动示意图;
图5是本发明车辆转向回正阶段受力及运动示意图;
图6是本发明实施例在车辆中应用的侧向视图;
图7是本发明实施例在车辆中应用的原理示意图;
图8是本发明实施例在车辆中应用的正视图。
具体实施方式
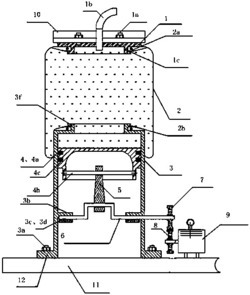
见图1,电驱动铰接式全地形履带车的无液压转向铰接机构1,包括转角保持器控制阀101、油罐102、铰接支座103、俯仰架104、转角保持器油缸105、扭转架106、连接盘107、角度传感器108、俯仰油缸109、俯仰控制阀110、液压泵111、液压油箱112及电动机113,其中转角保持器控制阀101连接转角保持器油缸105,控制其油路开闭,油罐102与转角保持器控制阀101相连,为转角保持器油缸105补充油液,电动机113带动液压泵111转动,为液压系统供能;液压泵111连接液压油箱112与俯仰控制阀110;俯仰控制阀110连接俯仰油缸109,控制其伸缩;
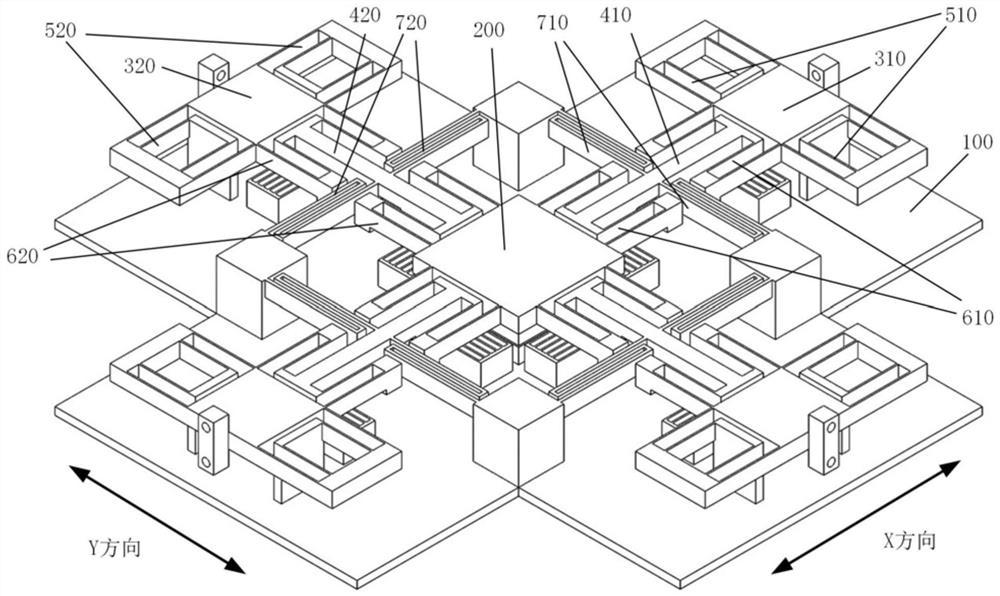
见图2,铰接支座103、俯仰油缸109、俯仰架104、扭转架106、转角保持器油缸105、角度传感器108及连接盘107构成运动机构,其中铰接支座103用于与前车2后部相连,与前车2运动保持一致,铰接支座103与俯仰架104相连,在连接轴线处构成俯仰转动副,俯仰油缸109连接铰接支座103与俯仰架104,通过改变俯仰油缸109的长度来改变铰接支座103与俯仰架104之间的角度,俯仰架104与扭转架106相连,在连接轴线处构成转向转动副;角度传感器108安装在俯仰架104与扭转架106的安装轴上部,用来测量俯仰架104与扭转架106的相对转动角度,该角度等于前车2与后车3之间的转向夹角;转角保持器油缸105左右两侧对称布置,两端分别与俯仰架104和扭转架106相连,用来保持俯仰架104与扭转架106之间的夹角;扭转架106与连接盘107相连,在连接轴线处构成扭转转动副,使前车2与后车3能相对扭转,形成扭转角;连接盘107用于与后车3前部相连,与后车3运动保持一致;上述运动机构实现了转向、俯仰、扭转3个自由度,使得铰接式全地形履带车4条履带可以与地面充分贴合,提高复杂地形的通过能力。
下边将本实施例应用于某型混合动力铰接式全地形履带车上来具体说明本发明的工作原理。
见图6,包含前车2、后车3和无液压转向铰接机构1,无液压转向铰接机构1通过铰接支座103与前车2连接,通过连接盘107与后车3连接;
见图7、8,前车2采用柴油机201直连发电机202的串联式混合动力,柴油机201与发电机202布置于前车2动力舱内,将化学能转换为机械能再转换为电能,由电池及逆变器/整流器203进行储存,并由电机控制器及驱动器208分配至前车右驱动电机204、前车左驱动电机206、后车右驱动电机302及后车左驱动电机303,驱动前车右主动轮205、前车左主动轮207、后车右主动轮301及后车左主动轮304,带动履带转动;电池203连接电动机113,为电动机113供能;转向盘209的转角信号传递给电机控制器208和转角保持器控制阀101;电机控制器208从角度传感器108获得前后车转向夹角;
当转向盘209在中位自由行程内时,转角保持器控制阀101处于关闭状态,使转角保持器油缸105闭锁,维持前后车转向夹角;电机控制器及驱动器208根据角度传感器108提供的前后车转向夹角结合车辆行进速度为前车右驱动电机204、前车左驱动电机206、后车右驱动电机302及后车左驱动电机303分配合适的功率。当转向盘209转角超出自由行程时,转角保持器控制阀101打开,使转角保持器油缸105处于自由伸缩状态;电机控制器及驱动器208根据转向盘209转动的角度、角度传感器108提供的前后车转向夹角结合车辆行进速度为前车右驱动电机204、前车左驱动电机206、后车右驱动电机302及后车左驱动电机303分配功率,使前后车反向转动,改变转向夹角。
实施例车型的转向过程与现有铰接式全地形履带车相同,但原理不同,现将转向过程分为3个阶段:开始转向阶段、保持转向阶段、转向回正阶段,以向左转向为例分阶段进行说明;
当转向盘209逆时针转动超出自由行程后,车辆处于开始转向阶段,转角保持器控制阀101打开,使转角保持器油缸105可以自由移动;电机控制器208根据转向盘209的转角与角度传感器108提供的前后车转向夹角结合车辆行进速度,为前车右驱动电机204、前车左驱动电机206、后车右驱动电机302及后车左驱动电机303分配不同的功率,在向前驱动力基础上,使前车右主动轮205叠加向后的转向力,前车左主动轮207叠加向前的转向力,后车右主动轮301叠加向前的转向力,后车左主动轮304叠加向后的转向力,地面反作用力对前车2产生逆时针转向力矩,对后车3产生顺时针转向力矩,使前后车反向转动,形成夹角,见图3,在此阶段,驾驶员可以通过角度传感器108的数值得知前后车转向夹角大小;
在前后车形成转向夹角后,转向盘209回正到中位自由行程内,此时车辆进入转向保持阶段,转角保持器控制阀101关闭,使转角保持器油缸105闭锁,平衡回正力矩,维持前后车转向夹角;电机控制器208根据角度传感器108提供的前后车转向夹角结合车辆行进速度,为前车右驱动电机204、前车左驱动电机206、后车右驱动电机302及后车左驱动电机303分配不同的功率,在向前驱动力基础上,使前车右主动轮205与后车右主动轮301叠加向后的转向力,前车左主动轮207与后车左主动轮304叠加向前的转向力,地面反作用力对前后车产生逆时针的转向力矩,使车辆保持转向,见图4;
当转向盘209反方向转动超出自由行程后,车辆进入转向回正阶段,转角保持器控制阀101打开,使转角保持器油缸105可以自由移动;电机控制器208根据转向盘209的转角与角度传感器108提供的前后车转向夹角结合车辆行进速度,为前车右驱动电机204、前车左驱动电机206、后车右驱动电机302及后车左驱动电机303分配不同的功率,使前车右主动轮205叠加向前的转向力,前车左主动轮207叠加向后的转向力,后车右主动轮301叠加向后的转向力,后车左主动轮304叠加向前的转向力,地面反作用力对前车2产生顺时针转向力矩,对后车3产生逆时针转向力矩,使前后车反向转动,转向夹角减小,见图5,在此阶段,驾驶员可以通过角度传感器108的数值得知车辆是否回正;
当车辆减速或制动时,转角保持器控制阀101处于关闭状态,使转角保持器油缸105闭锁,维持前后车转向夹角,保证制动时车辆的稳定性;通过前车右驱动电机204、前车左驱动电机206、后车右驱动电机302及后车左驱动电机303的再生制动技术将车辆动能转换为电能,存储于电池203中,这可以极大地提升车辆的能源利用率,大幅提高最大行驶里程;
当车辆越障时,电动机113启动,驱动液压泵111转动,俯仰控制阀110控制俯仰油缸109缩回,使前后车形成俯仰夹角,提高车辆的越障能力;在越障过程中,转角保持器控制阀101维持关闭状态,使转角保持器油缸105闭锁,维持前后车转向夹角,增强车辆越障时的直线稳定性;在越障结束后,俯仰控制阀110控制俯仰油缸109伸出,使前后车俯仰夹角恢复为0,电动机113停止工作;
当车辆越壕时,通过俯仰控制阀110使俯仰油缸109闭锁,维持前后车俯仰夹角,以提高车辆越壕能力;转角保持器控制阀101处于关闭状态,使转角保持器油缸105闭锁,维持前后车转向夹角,提高车辆越壕时的直线稳定性。
一种电驱动铰接式全地形履带车的无液压转向铰接机构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0