







专利摘要
本实用新型公开了一种轮履交替式全地形车,属于全地形车技术领域。本实用新型的目的是克服轮式结构的全地形车和履带式结构的全地形车各自的不足,提出了一种兼顾运动速度与越障能力的轮履交替式全地形车。本实用新型中在履带式结构的全地形车基础上,增加了四个升降轮,在利用连杆设计了升降轮升降运动机构,由步进电机驱动,能够实现四个升降轮的升降,实现轮履交替或配合工作。当全地形车通过泥泞土地和沙漠时,单独驱动四个三角履带;跨越壕沟、攀爬楼梯和台阶时,驱动四个三角履带和两个后方的升降轮;在平坦路面上单独驱动四个升降轮行驶。该全地形车更适用于复杂多变的地形,实用性强。
权利要求
1.一种轮履交替式全地形车,主要包括:四个三角履带(7)、三角履带驱动机构和车体(3);三角履带驱动机构与四个三角履带(7)连接,用于驱动四个三角履带(7)行走和转向;其特征在于,
该全地形车还包括:四个升降轮(6)、升降轮升降运动机构、升降运动驱动机构(10)和升降轮驱动机构,其中,升降运动驱动机构安装在车体(3)内,升降运动驱动机构(10)与升降轮升降运动机构连接,且数量均为二套,分别驱动前后两对升降轮(6)进行升降运动;升降轮驱动机构分别与四个升降轮(6)连接,用于驱动四个升降轮(6)的行走和转向;
所述的降轮升降运动机构由连杆Ⅰ(11)、连杆Ⅱ(9)、连杆Ⅲ(8)、连杆Ⅳ(1)、连杆Ⅴ(2)、连杆Ⅵ(4)和导路板(5)组成;连杆Ⅴ(2)一端通过固定销固定在车体(3)的一侧,另一端与连杆Ⅵ(4)的上端铰接,且铰接点固定在车体(3)上;连杆Ⅵ(4)下端与一个升降轮(6)连接,连杆Ⅵ(4)中部开有横槽,连杆Ⅳ(1)的一端安装在该横槽中,并通过连杆Ⅳ(1)端部的定位销固定,连杆Ⅳ(1)另一端开有横槽,中部设有折弯,在折弯点与车体(3)铰接固定;导路板(5)分别安装在车体下方前后端的左右两侧,导路板(5)上开有横槽;前端和后端的两个横槽中分别安装有连杆Ⅲ(8),连杆Ⅲ(8)的两端分别与连杆Ⅳ(1)端部的横槽通过定位销连接;连杆Ⅲ(8)中部通过固定块与连杆Ⅱ(9)一端铰接,连杆Ⅱ(9)另一端与连杆Ⅰ(11)铰接,连杆Ⅰ(11)另一端与升降运动驱动机构(10)连接;所述的升降运动驱动机构(10)为步进电机,所述的步进电机的输出轴与连杆Ⅰ(11)花键连接。
2.根据权利要求1所述的轮履交替式全地形车,其特征在于,所述的升降轮驱动机构为轮毂电机,每个轮毂电机分别与一个升降轮(6)连接;所述的三角履带驱动机构包括前驱电机、后驱电机和转向电机,前驱电机和转向电机安装在车体(3)前部,后驱电机安装在车体(3)后部。
3.根据权利要求1所述的轮履交替式全地形车,其特征在于,所述的三角履带包括驱动轮(18)、橡胶履带(19)、摆架(17)、导向轮(16)和支撑轮(20);驱动轮(18)中心处设有车轮轴,驱动轮(18)和车轮轴固定连接,驱动轮(18)和橡胶履带(19)通过齿轮齿条副连接;四个导向轮和六个支撑轮固定连接在五个从动轮轴上,从动轮轴可在摆架开的通孔中转动,导向轮的两个从动轮轴设在摆架的两端,支撑轮的三个从动轮轴设在摆架的下端;四个导向轮和六个支撑轮与橡胶履带内侧平滑连接;
前驱电机和后驱电机分别与三角履带机构中驱动轮(18)传动连接,用以驱动三角履带的行走和转向;
转向电机(14)通过转向主动杆(22)、转向连杆(23)带动转向摇杆(21)作左右摆动,转向拨杆(24)与三角履带(7)相连,转向摇杆(21)通过转向拨杆(24)与三角履带(7)间接相连,通过转向电机正反转,实现左右转向。
4.根据权利要求1所述的轮履交替式全地形车,其特征在于,该全地形车还包括控制系统,所述控制系统由控制器Ⅰ、控制器Ⅱ、控制器Ⅲ、控制器Ⅳ和控制器Ⅴ;控制器Ⅰ和控制器Ⅱ分别用于控制两个步进电机的开关;控制器Ⅲ用于控制三角履带驱动机构;控制器Ⅳ用于控制前方两个升降轮上的轮毂电机开关,控制器Ⅴ用于控制后方两个升降轮上的轮毂电机开关。
说明书
技术领域
本实用新型属于全地形车技术领域。
背景技术
全地形车应用领域和应用需求的不同,其结构形式也存在着相当大的差异。通常可分为轮式全地形车、足式全地形车、履带式全地形车。足式全地形车相比轮式全地形车,其优点在于对地形的要求低,可轻松跨越障碍物,走过沙地、沼泽等特殊路面,但缺点是控制系统极其复杂,开发周期长。轮式全地形车则具有较高的运动速度和效率,同时控制驱动器相对简单,活动半径也远超过足式全地形车。因而具有更广泛的应用前景。在实际应用中,随着需求的多样化,出现了许多不同类型轮式全地形车的运动构形,这包括车轮个数和类型、车轮的安装位置等。但轮式全地形车很难通过沙地、滩涂、冰雪等恶劣路面环境。履带式全地形车越障性能好、通过性强,能够很好地适应轮式全地形车无法胜任的沙地、滩涂、冰雪等恶劣路面环境,其缺点是行驶速度较低、机动性差。
发明内容
本实用新型的目的是克服上述轮式结构的全地形车和履带式结构的全地形车各自的不足,提出了一种兼顾运动速度与越障能力的轮履交替式全地形车。该全地形车在履带式移动和轮式移动之间的相互转变及配合,使得全地形车具有在正常路面的高机动性以及在跨越壕沟、攀爬斜坡、翻越台阶或者遇到特别大的侧坡等复杂路面时的高通过性。
本实用新型所采用的技术方案如下:
一种轮履交替式全地形车,主要包括:四个三角履带7、三角履带驱动机构和车体3;三角履带驱动机构与四个三角履带7连接,用于驱动四个三角履带7行走和转向;
此外,该全地形车还包括:四个升降轮6、升降轮升降运动机构、升降运动驱动机构10和升降轮驱动机构,其中,升降运动驱动机构安装在车体3内,升降运动驱动机构10与升降轮升降运动机构连接,且数量均为二套,分别驱动前后两对升降轮6进行升降运动;升降轮驱动机构分别与四个升降轮6连接,用于驱动四个升降轮6的行走和转向;
所述的降轮升降运动机构由连杆Ⅰ11、连杆Ⅱ9、连杆Ⅲ8、连杆Ⅳ1、连杆Ⅴ2、连杆Ⅵ4和导路板5组成;连杆Ⅴ2一端通过固定销固定在车体3的一侧,另一端与连杆Ⅵ4的上端铰接,且铰接点固定在车体3上;连杆Ⅵ4下端与一个升降轮6连接,连杆Ⅵ4中部开有横槽,连杆Ⅳ1的一端安装在该横槽中,并通过连杆Ⅳ1端部的定位销固定,连杆Ⅳ1另一端开有横槽,中部设有折弯,在折弯点与车体3铰接固定;导路板5分别安装在车体下方前后端的左右两侧,导路板5上开有横槽;前端和后端的两个横槽中分别安装有连杆Ⅲ8,连杆Ⅲ8的两端分别与连杆Ⅳ1端部的横槽通过定位销连接;连杆Ⅲ8中部通过固定块与连杆Ⅱ9一端铰接,连杆Ⅱ9另一端与连杆Ⅰ11铰接,连杆Ⅰ11另一端与升降运动驱动机构10连接;所述的升降运动驱动机构10为步进电机,所述的步进电机的输出轴与连杆Ⅰ11花键连接。
所述的升降轮驱动机构为轮毂电机,每个轮毂电机分别与一个升降轮6连接;所述的三角履带驱动机构包括前驱电机、后驱电机和转向电机,前驱电机和转向电机安装在车体3前部,后驱电机安装在车体3后部;
所述的三角履带包括驱动轮18、橡胶履带19、摆架17、导向轮16和支撑轮20;驱动轮18中心处设有车轮轴,驱动轮18和车轮轴固定连接,驱动轮18和橡胶履带19通过齿轮齿条副连接;四个导向轮和六个支撑轮固定连接在五个从动轮轴上,从动轮轴可在摆架开的通孔中转动,导向轮的两个从动轮轴设在摆架的两端,支撑轮的三个从动轮轴设在摆架的下端;四个导向轮和六个支撑轮与橡胶履带内侧平滑连接。该三角履带的工作过程如下:车轮轴转动带动驱动轮旋转,驱动轮通过齿轮齿条副带动橡胶履带运动,支撑轮与导向轮借助与橡胶履带之间的摩擦力运动。通过上述过程,实现三角履带的运动。
前驱电机和后驱电机分别与三角履带机构中驱动轮18传动连接,用以驱动三角履带的行走和转向。
转向电机14通过转向主动杆22、转向连杆23带动转向摇杆21作左右摆动,转向拨杆24与三角履带7相连,转向摇杆21通过转向拨杆24与三角履带7间接相连,通过转向电机正反转,实现左右转向。
在本实用新型还包括控制系统,所述控制系统由控制器Ⅰ、控制器Ⅱ、控制器Ⅲ、控制器Ⅳ和控制器Ⅴ。控制器Ⅰ和控制器Ⅱ分别用于控制两个步进电机的开关;控制器Ⅲ用于控制三角履带驱动机构;控制器Ⅳ用于控制前方两个升降轮上的轮毂电机开关,控制器Ⅴ用于控制后方两个升降轮上的轮毂电机开关。
步进电机的输出轴旋转,带动连杆Ⅰ11旋转,连杆Ⅰ11带动连杆Ⅱ9作平面运动,连杆Ⅱ9的运动带动连杆Ⅲ8进行往复直线运动;步进电机的回转运动转化为连杆Ⅲ8的往复直线运动的目的;连杆Ⅲ8的一端带动连杆Ⅳ1摆动,连杆Ⅳ1通过其上的固定销带动连杆Ⅵ4作平面运动,连杆Ⅵ4带动连杆Ⅴ2摆动,连杆Ⅴ2的摆动又反过来带动连杆Ⅵ4做升降运动,连杆Ⅵ4带动升降轮6实现升降运动。
本实用新型与现有技术相比具有以下优点:
采用轮履复合形式代替传统的四轮和六轮,且将传统轮型和三角履带结合起来,综合利用传统轮型行驶速度快和三角履带越障能力强的优点。
外侧的四个升降轮可以根据不同的工况调整到离开地面,与内侧的三角履带一起附着于地面以及支撑起车身单独附着于地面三种姿态,灵活性高。
适用于多种工况。在平坦的路面上只驱动外侧的四个升降轮,行驶速度快;过泥泞或沼泽路面单独驱动四个三角履带,三角履带与地面的接触面积比车轮与地面的接触面积大,接地比压小,走泥泞或沼泽路面不会陷下去;攀爬楼梯和斜坡时同时驱动四个三角履带和升降轮,稳定性更高;跨越壕沟时内侧三角履带与外侧升降轮配合进行,跨越沟壑更宽,越障能力强。
综上诉述,本实用新型可实现轮履交替和配合工作,兼顾行驶速度与越障能力,适用于多种工况,实用性强。
附图说明
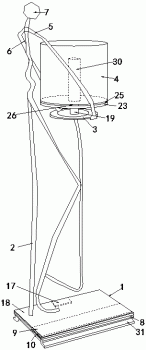
图1是本实用新型升降轮和三角履带同时工作时的状态二参考图。
图2是升降轮和三角履带同时工作时的状态的仰视图。
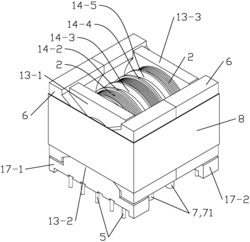
图3是本实用新型的三角履带示意图。
图4是本实用新型升降轮脱离地面,三角履带工作时的状态一参考图。
图5是本实用新型三角履带工作时的状态一的仰视图。
图6是本实用新型升降轮工作,三角履带脱离地面时的状态四参考图。
图7是三角履带脱离地面时的状态四的仰视图。
图8是三角履带同时工作时的状态二的左视图。
图9是三角履带同时工作时的状态二的右视图。
图10是转向机构的示意图。
附图标记如下:
1——连杆Ⅳ,2——连杆Ⅴ,3——车体,4——连杆Ⅵ,5——导路板,6——升降轮,7——三角履带,8——连杆Ⅲ,9——连杆Ⅱ,10——升降轮驱动机构,11——连杆Ⅰ,12——定位销钉,13——前驱电机,14——转向电机,15——后驱电机,16——导向轮,17——摆架,18——驱动轮,19——橡胶履带,20——支撑轮,21——转向摇杆,22——转向主动杆,23——转向连杆,24——转向拨杆。
具体实施方式
如图1所示,本实施例中一种轮履交替式全地形车,主要包括:四个三角履带7、三角履带驱动机构和车体3;三角履带驱动机构与四个三角履带7连接,用于驱动四个三角履带7行走和转向;
此外,该全地形车还包括:四个升降轮6、升降轮升降运动机构、升降运动驱动机构10和升降轮驱动机构,其中,升降运动驱动机构安装在车体3内,升降运动驱动机构10与升降轮升降运动机构连接,且数量均为二套,分别驱动前后两对升降轮6进行升降运动;升降轮驱动机构分别与四个升降轮6连接,用于驱动四个升降轮6的行走和转向;
所述的降轮升降运动机构由连杆Ⅰ11、连杆Ⅱ9、连杆Ⅲ8、连杆Ⅳ1、连杆Ⅴ2、连杆Ⅵ4和导路板5组成;连杆Ⅴ2一端通过固定销固定在车体3的一侧,另一端与连杆Ⅵ4的上端铰接,且铰接点固定在车体3上;连杆Ⅵ4下端与一个升降轮6连接,连杆Ⅵ4中部开有横槽,连杆Ⅳ1的一端安装在该横槽中,并通过连杆Ⅳ1端部的定位销固定,连杆Ⅳ1另一端开有横槽,中部设有折弯,在折弯点与车体3铰接固定;导路板5分别安装在车体下方前后端的左右两侧,导路板5上开有横槽;前端和后端的两个横槽中分别安装有连杆Ⅲ8,连杆Ⅲ8的两端分别与连杆Ⅳ1端部的横槽通过定位销连接;连杆Ⅲ8中部通过固定块与连杆Ⅱ9一端铰接,连杆Ⅱ9另一端与连杆Ⅰ11铰接,连杆Ⅰ11另一端与升降运动驱动机构10连接;所述的升降运动驱动机构10为步进电机,所述的步进电机的输出轴与连杆Ⅰ11花键连接。
步进电机的输出轴旋转,带动连杆Ⅰ11旋转,连杆Ⅰ11带动连杆Ⅱ9作平面运动,连杆Ⅱ9的运动带动连杆Ⅲ8进行往复直线运动;步进电机的回转运动转化为连杆Ⅲ8的往复直线运动的目的;连杆Ⅲ8的一端带动连杆Ⅳ1摆动,连杆Ⅳ1通过其上的固定销带动连杆Ⅵ4作平面运动,连杆Ⅵ4带动连杆Ⅴ2摆动,连杆Ⅴ2的摆动又反过来带动连杆Ⅵ4做升降运动,连杆Ⅵ4带动升降轮6实现升降运动。
所述的升降轮驱动机构为轮毂电机,每个轮毂电机分别与一个升降轮6连接;所述的三角履带驱动机构包括前驱电机、后驱电机和转向电机,前驱电机和转向电机安装在车体3前部,后驱电机安装在车体3后部;
所述的三角履带包括驱动轮18、橡胶履带19、摆架17、导向轮16和支撑轮20;驱动轮18中心处设有车轮轴,驱动轮18和车轮轴固定连接,驱动轮18和橡胶履带19通过齿轮齿条副连接;四个导向轮16和六个支撑轮20固定连接在五个从动轮轴上,从动轮轴可在摆架开的通孔中转动,导向轮16的两个从动轮轴设在摆架的两端,支撑轮20的三个从动轮轴设在摆架的下端;四个导向轮16和六个支撑轮20与橡胶履带19内侧平滑连接。
三角履带的工作过程如下:车轮轴转动带动驱动轮旋转,驱动轮通过齿轮齿条副带动橡胶履带运动,支撑轮与导向轮借助与橡胶履带之间的摩擦力运动。
前驱电机和后驱电机分别与三角履带中驱动轮18传动连接,用以驱动三角履带的行走和转向。
转向电机14通过转向主动杆22、转向连杆23带动转向摇杆21作左右摆动,转向拨杆24与三角履带7相连,转向摇杆21通过转向拨杆24与三角履带7间接相连,通过转向电机正反转,实现左右转向。
在本实用新型还包括控制系统,所述控制系统由控制器Ⅰ、控制器Ⅱ、控制器Ⅲ、控制器Ⅳ和控制器Ⅴ。控制器Ⅰ和控制器Ⅱ分别用于控制两个步进电机的开关;控制器Ⅲ用于控制三角履带驱动机构;控制器Ⅳ用于控制前方两个升降轮上的轮毂电机开关,控制器Ⅴ用于控制后方两个升降轮上的轮毂电机开关。
在实施例中,外侧的四个升降轮可以根据不同的工况升降到不同的位置,以实现全地形车的四种姿态:
姿态一:四个三角履带着地;
姿态二:后面的两个升降轮与四个三角履带同时着地;
姿态三:四个升降轮与四个三角履带同时着地;
姿态四:四个升降轮单独着地。
假设全地形车初始状态为姿态一,此时通过控制器Ⅰ和控制器Ⅱ使两组步进电机同时正转,分别带动两个连杆Ⅰ11正向旋转,从而带动两个连杆Ⅱ9做平面运动,进而带动两个连杆Ⅲ8相背运动,连杆Ⅲ8的一端带动连杆Ⅳ1摆动,连杆Ⅳ1通过其上的固定销带动连杆Ⅵ4作平面运动,连杆Ⅵ4带动连杆Ⅴ2摆动,连杆Ⅴ2的摆动又反过来带动连杆Ⅵ4下降;连杆Ⅵ4带动升降轮6下降,四个升降轮同时到达地面,且刚好与三角履带处于同一水平面,此时到达姿态三。
继续上述操作,此时地面对三角履带的支持力逐渐下降。当三角履带脱离地面时,此时达到姿态四。进行与上述相反的操作,可以回到姿态一。
也可以单独使用控制器Ⅰ或控制器Ⅱ,单独驱动一组步进电机,使全地形车由姿态一到达姿态二。
在实施例中,过泥泞土地、沙漠时,使用姿态一,履带与地面接触面积大,接地比压小,不易下陷;跨越壕沟时、攀爬台阶、楼梯和斜坡时,使用姿态二,更加容易通过;在过崎岖山路时,使用姿态三,实现平稳通过;当全地形车行驶在平坦路面时,使用姿态四,可以实现高速运动。
以上实施例仅是本实用新型的个案,任何根据本实用新型精神所做的替换或各实施例间的组合均应理解为未脱离本实用新型的保护范围。
一种轮履交替式全地形车专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0