









专利摘要
本实用新型公开了一种便携式轻型单轨辅助运输机器人,包括制动装置、行走装置,本实用新型中行走机构采用卡扣锁定夹紧连杆的方式,简化了单轨吊的安装拆卸步骤;制动装置利用摩擦块与工字钢内侧的上下两面接触产生的摩擦力进行制动,满足了单轨吊便于安装拆卸的要求。本实用新型的设计改善了一般单轨吊结构较重,安装极为不便的缺点,且单轨吊整体结构的重量较轻,易于携带,在降低了工作人员安装劳动强度的同时,也保证了安全生产。
权利要求
1.一种便携式轻型单轨辅助运输机器人,其特征在于,包括制动装置、行走装置,其中,
所述行走装置包括箱体和行走机构,所述箱体内设有液压马达,所述液压马达输出轴连接有驱动齿轮,所述驱动齿轮与工字钢齿条相啮合;所述箱体侧面上设有安装槽,所述行走机构包括限位轴、弹簧、限位轴连接件、箱体连接件和行走轮架,所述限位轴安装在安装槽内,所述弹簧的一端与限位轴连接件相连,另一端与所述限位轴匹配连接即所述弹簧的内直径与限位轴相匹配,所述弹簧的外直径与所述安装槽内直径相匹配,所述安装槽内设有卡扣,对限位轴进行限位;所述箱体连接件与所述箱体连接,所述箱体连接件与所述行走轮架通过连杆二、连杆三连接,所述连杆二与连杆三平行设置,且所述连杆二、连杆三分别与箱体连接件和所述行走轮架活动连接;所述限位轴连接件上活动连接有连杆一,所述连杆一的另一端与所述连杆二活动连接;所述行走轮架上安装有小行走轮和大行走轮;
所述制动装置包括制动部件和安装部件,所述制动部件包括安装板、螺母副和三角固定架,所述安装板下方连接有步进电机,所述步进电机的输出轴为螺纹输出轴,所述螺纹输出轴穿过安装板与螺母副螺纹连接;所述螺母副两端分别活动连接有连杆四,两连杆四的另一端分别活动连接有连杆五、连杆六;所述三角固定架通过固定轴一、固定轴二与安装板连接,连杆五、连杆六均与固定轴一活动连接,且连杆五与连杆六呈交叉设置,所述连杆五、连杆六两端分别安装有摩擦块,所述三角固定架下端分别安装有行走轮,所述行走轮与单轨吊轨道滚动连接;
所述安装部件包括部件支撑杆、旋转套筒、连杆七、连杆八、连杆九,所述部件支撑杆上端与所述旋转套筒连接,所述部件支撑杆下端通过制动装置连接件与箱体连接;所述旋转套筒上端与连杆七连接,所述连杆七与所述安装板活动连接;所述安装板上设有安装轴,连杆八、连杆九平行设置且两端分别与安装轴活动连接;所述部件支撑杆上设有通孔,所述旋转套筒上对称设置有孔,通孔与孔可配合安装卡位销。
2.根据权利要求1所述的便携式轻型单轨辅助运输机器人,其特征在于,所述限位轴连接件上还连接有辅助轮架,所述辅助轮架上安装有辅助轮。
3.根据权利要求1所述的便携式轻型单轨辅助运输机器人,其特征在于,所述部件支撑杆下端设有外螺纹,其通过螺母与制动装置连接件连接,制动装置连接件与箱体连接。
4.根据权利要求1所述的便携式轻型单轨辅助运输机器人,其特征在于,所述辅助运输机器人还包括备用箱,所述备用箱与所述箱体连接。
说明书
技术领域
本实用新型涉及工业机器人技术领域,具体涉及一种便携式轻型单轨辅助运输机器人。
背景技术
我国目前的煤矿运输设备研究技术尚未成熟,很多单轨吊都是笨重且不易携带,安装拆卸的工作费时费力,给工人的身体承受能力带来了巨大的挑战。传统的单轨吊安装一般需要多人配合才能完成,而且工作量大,正是因为这样使得单轨吊的运输工作难度变高,效率变慢,极大的影响了井下的安全工作。利用轻型单轨吊,可大大减小安装拆卸单轨吊的难度,减轻了工人的劳动强度,省时省力,给井下运输的工作提供了极大的帮助。
实用新型内容
为此,需要提供一种便携式轻型单轨辅助运输机器人。
本实用新型采取的具体技术方案是:
一种便携式轻型单轨辅助运输机器人,包括制动装置、行走装置,其中,
所述行走装置包括箱体和行走机构,所述箱体内设有液压马达,所述液压马达输出轴连接有驱动齿轮,所述驱动齿轮与工字钢齿条相啮合;所述箱体侧面上设有安装槽,所述行走机构包括限位轴、弹簧、限位轴连接件、箱体连接件和行走轮架,所述限位轴安装在安装槽内,所述弹簧的一端与限位轴连接件相连,另一端与所述限位轴匹配连接即所述弹簧的内直径与限位轴相匹配,所述弹簧的外直径与所述安装槽内直径相匹配,所述安装槽内设有卡扣,对限位轴进行限位;所述箱体连接件与所述箱体连接,所述箱体连接件与所述行走轮架通过连杆二、连杆三连接,所述连杆二与连杆三平行设置,且所述连杆二、连杆三分别与箱体连接件和所述行走轮架活动连接;所述限位轴连接件上活动连接有连杆一,所述连杆一的另一端与所述连杆二活动连接;所述行走轮架上安装有小行走轮和大行走轮;
所述制动装置包括制动部件和安装部件,所述制动部件包括安装板、螺母副和三角固定架,所述安装板下方连接有步进电机,所述步进电机的输出轴为螺纹输出轴,所述螺纹输出轴穿过安装板与螺母副螺纹连接;所述螺母副两端分别活动连接有连杆四,两连杆四的另一端分别活动连接有连杆五、连杆六;所述三角固定架通过固定轴一、固定轴二与安装板连接,连杆五、连杆六均与固定轴一活动连接,且连杆五与连杆六呈交叉设置,所述连杆五、连杆六两端分别安装有摩擦块,所述三角固定架下端分别安装有行走轮,所述行走轮与单轨吊轨道滚动连接,即可沿着轨道行走;
所述安装部件包括部件支撑杆、旋转套筒、连杆七、连杆八、连杆九,所述部件支撑杆上端与所述旋转套筒连接,所述部件支撑杆下端通过制动装置连接件与箱体连接;所述旋转套筒上端与连杆七连接,所述连杆七与所述安装板活动连接;所述安装板上设有安装轴,连杆八、连杆九平行设置且两端分别与安装轴活动连接;所述部件支撑杆上设有通孔,所述旋转套筒上对称设置有孔,通孔与孔可配合安装卡位销。
优选地,所述限位轴连接件上还连接有辅助轮架,所述辅助轮架上安装有辅助轮。
优选地,所述部件支撑杆下端设有外螺纹,其通过螺母与制动装置连接件连接,制动装置连接件与箱体连接。
优选地,所述辅助运输机器人还包括备用箱,所述备用箱与所述箱体连接。
本实用新型的有益效果是:本实用新型中行走机构采用卡扣锁定夹紧连杆的方式,简化了单轨吊的安装拆卸步骤;制动装置利用摩擦块与工字钢内侧的上下两面接触产生的摩擦力进行制动,满足了单轨吊便于安装拆卸的要求。本实用新型的设计改善了一般单轨吊结构较重,安装极为不便的缺点,且单轨吊整体结构的重量较轻,易于携带,在降低了工作人员安装劳动强度的同时,也保证了安全生产。
附图说明
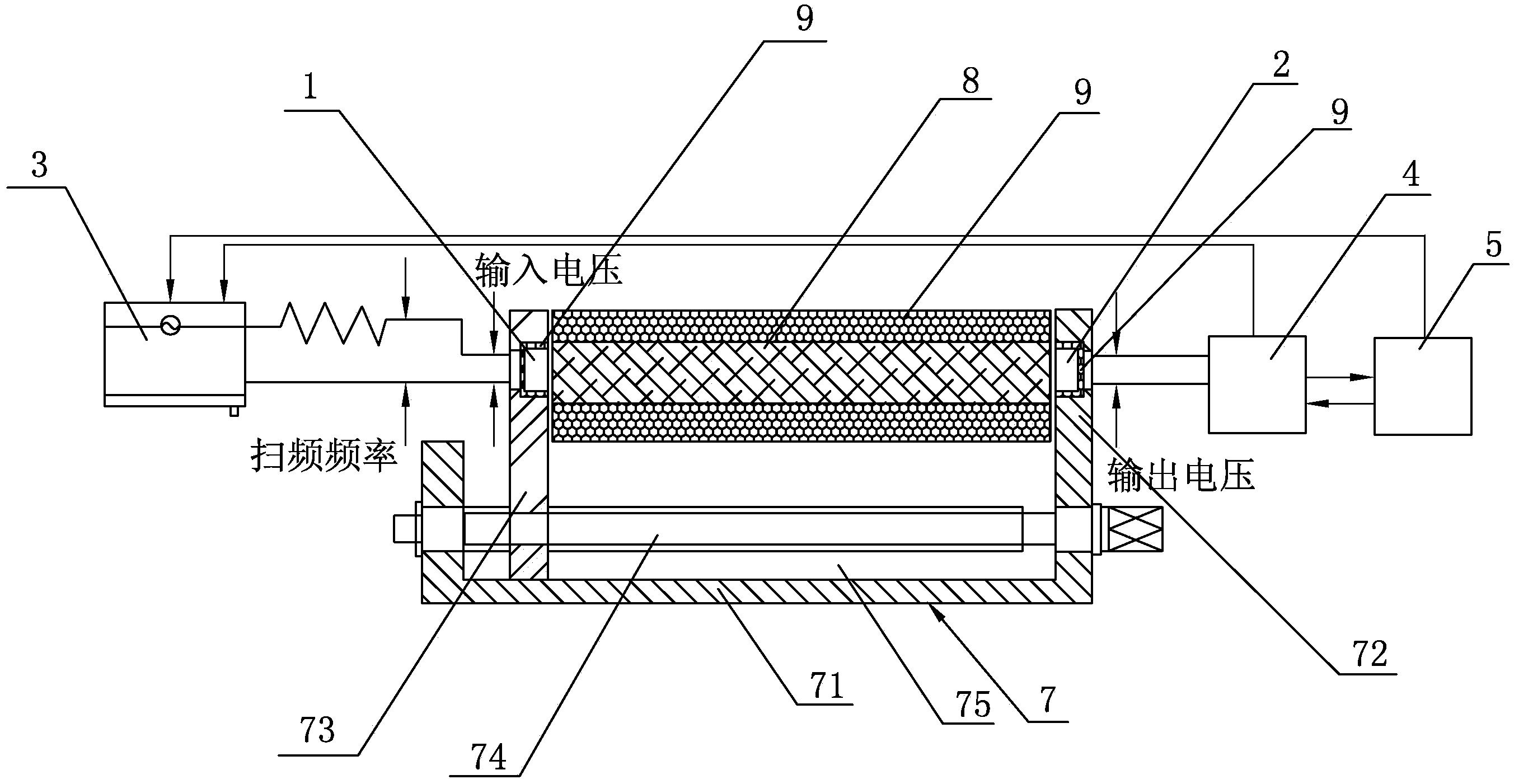
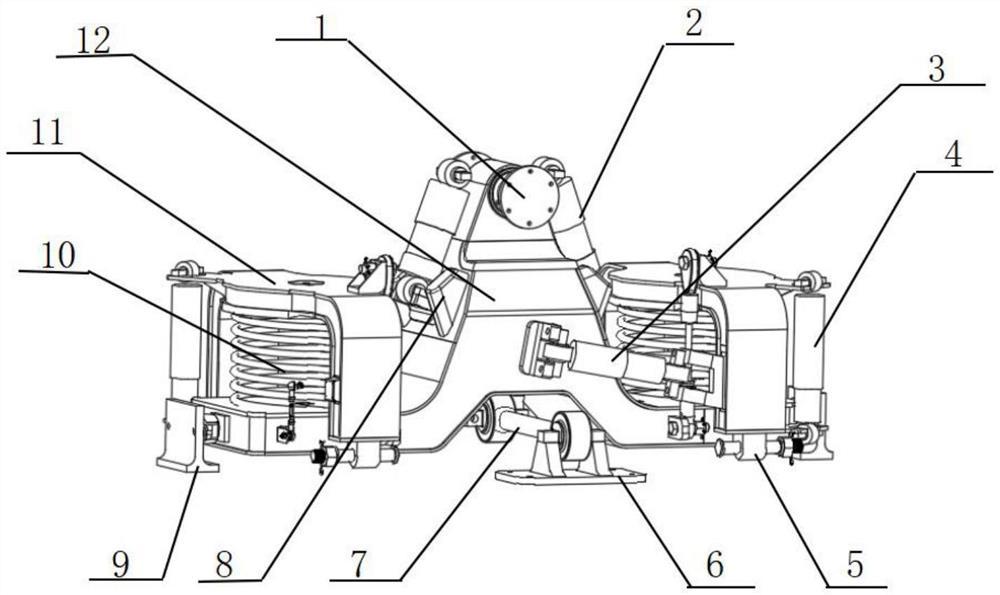
图1为便携式轻型单轨辅助运输机器人的结构示意图;
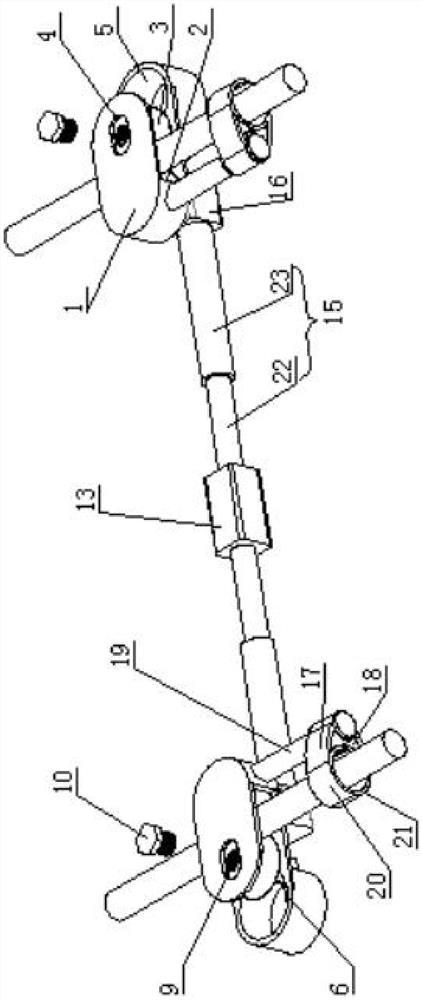
图2为行走装置的结构示意图;
图3为小行走轮和大行走轮的安装示意图;
图4为制动装置的结构示意图;
图5为制动部件的结构示意图;
图6为图4的俯视图;
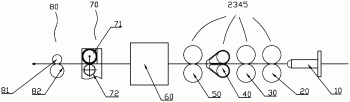
图7为行走装置的的示意图;
图8为便携式轻型单轨辅助运输机器人的安装示意图。
具体实施方式
以下将结合附图所示的实施方式对本实用新型进行详细描述。但该实施方式并不限制本实用新型,本领域的普通技术人员根据该实施方式所做出的结构、方法、或功能上的变换均包含在本实用新型的保护范围内。此处,“左”、“右”、“上”、“下”、“前”、“后”等指示的方位或位置关系仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
请参阅图1,本实施例1提供了一种便携式轻型单轨辅助运输机器人,包括制动装置2、行走装置1,其中,
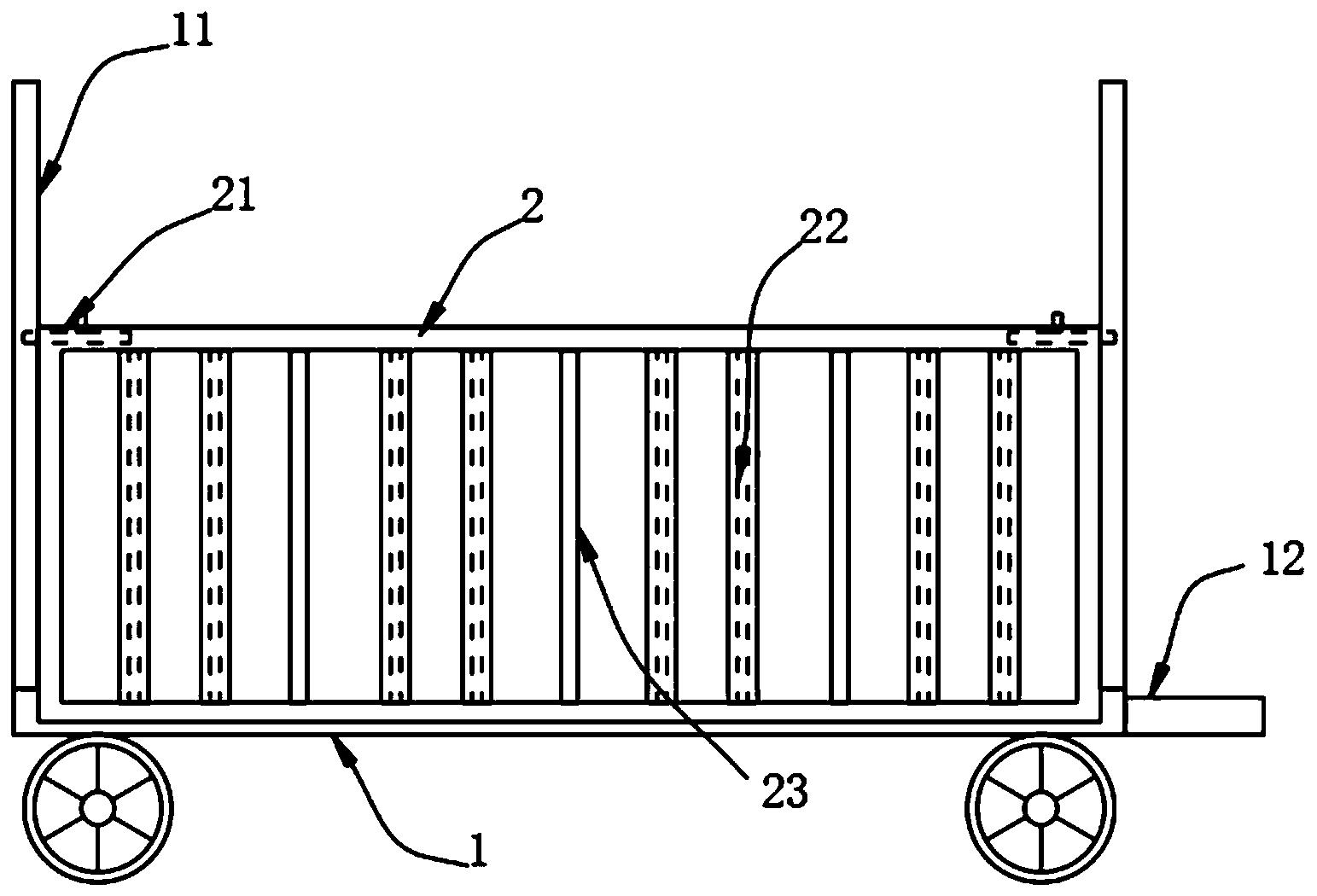
所述行走装置1包括箱体11和行走机构12,所述箱体11内设有液压马达111,所述液压马达111输出轴连接有驱动齿轮112,所述驱动齿轮112与工字钢齿条相啮合;如图2所示,所述箱体11侧面上设有安装槽114,所述行走机构12包括限位轴121、弹簧122、限位轴连接件123、箱体连接件124和行走轮架125,所述限位轴121安装在安装槽114内,所述弹簧122的一端与限位轴连接件123相连,另一端与所述限位轴121匹配连接即所述弹簧122的内直径与限位轴121相匹配,所述弹簧122的外直径与所述安装槽内直径相匹配;所述安装槽144内设有卡扣113,对限位轴121进行限位;所述箱体连接件124与所述箱体11连接,所述箱体连接件124与所述行走轮架125通过连杆二126、连杆三127连接,所述连杆二126与连杆三127平行设置,且所述连杆二126、连杆三127分别与箱体连接件124和所述行走轮架125活动连接;所述限位轴连接件123上活动连接有连杆一128,所述连杆一128的另一端与所述连杆二126活动连接;所述限位轴连接件123上还连接有辅助轮架,所述辅助轮架上安装有辅助轮129;所述行走轮架125上安装有小行走轮1251和大行走轮1252,安装方式如图3所示,使行走装置可在单轨吊轨道行走;
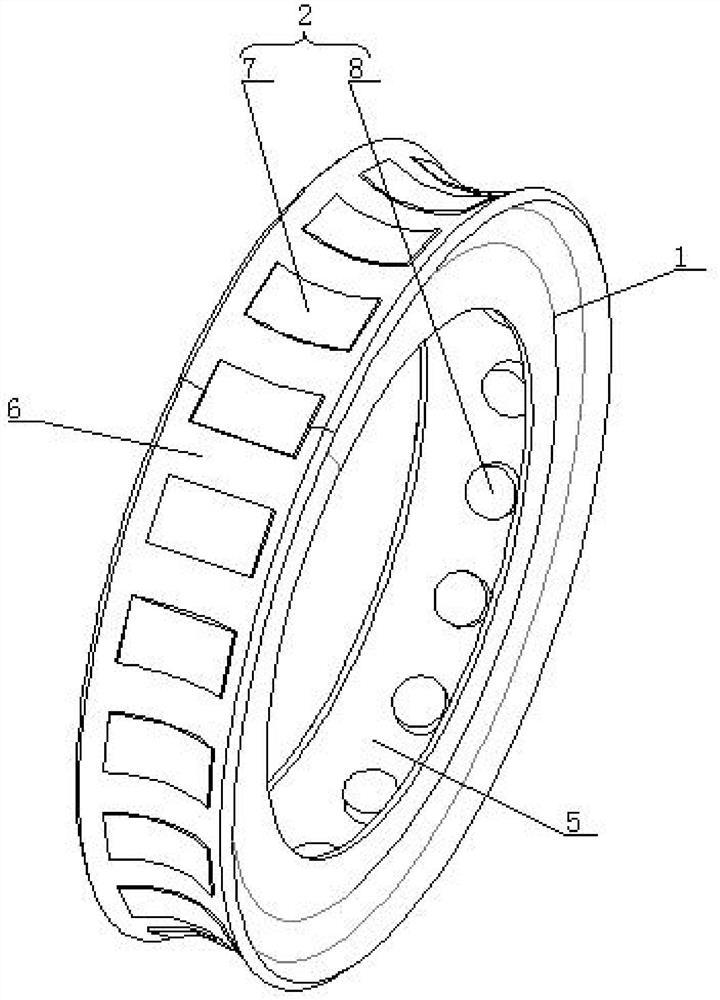
如图4所示,所述制动装置2包括制动部件21和安装部件,如图5所示,所述制动部件21包括安装板211、螺母副212和三角固定架213,所述安装板211下方连接有步进电机214,所述步进电机214的输出轴为螺纹输出轴2141,所述螺纹输出轴2141穿过安装板211与螺母副212螺纹连接;所述螺母副212两端分别活动连接有连杆四215,两连杆四215的另一端分别活动连接有连杆五216、连杆六217;所述三角固定架通过固定轴一2110、固定轴二2111与安装板211连接,连杆五216、连杆六217均与固定轴一2110活动连接,且连杆五216与连杆六217呈交叉设置,所述连杆五216、连杆六217两端分别安装有摩擦块218,所述三角固定架213下端分别安装有行走轮219,所述行走轮219与单轨吊轨道滚动连接;
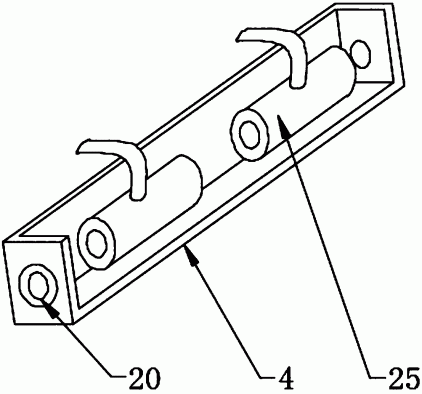
如图4-6所示,所述安装部件包括部件支撑杆221、旋转套筒222、连杆七223、连杆八224、连杆九225,所述部件支撑杆221上端与所述旋转套筒222连接,所述部件支撑杆221下端通过制动装置连接件3与箱体11连接,所述部件支撑杆221下端设有外螺纹,其通过螺母与制动装置连接件3连接,制动装置连接件3与箱体11连接。所述旋转套筒222上端与连杆七223连接,所述连杆七223与所述安装板211活动连接;所述安装板211上设有安装轴2111,连杆八224、连杆九225平行设置且两端分别与安装轴2111活动连接;所述部件支撑杆221上设有通孔,所述旋转套筒222上对称设置有孔,通孔与孔可配合安装卡位销226。
所述辅助运输机器人还包括备用箱13,所述备用箱13与所述箱体11连接。备用箱用于存放对制动部件上的步进电机进行驱动的蓄电池。
行走机构的结构原理:通过给限位轴一个向下的力,把连杆一往下拉,在两边对称的连杆二受到连杆一的拉扯作用下,连杆二会往里面夹紧,行走轮架在平行连杆二的作用力下,带动行走轮往工字钢腹板方向运动,而此时,限位轴下面的卡扣下移到一定距离,卡扣会借助弹簧的弹力顺势弹出卡在箱体上,行走机构的整个运动也就固定住了。
制动部件的结构原理:通过步进电机的驱动,带动丝杠的旋转,与丝杠配合的丝杠副在轴向力的作用下进行上下移动,当丝杠副受到向下的轴向力时,牵动连杆二向下运动,而此时连杆四和连杆五在连杆三的牵引下,将会向上下方向张开,连杆上的摩擦块便会对工字钢的上下运行轨道施加力的作用,进而实现摩擦制动。同理,只要给予丝杠副向上的轴向力,连杆四和连杆五便会在连杆三的推动下实现夹紧动作,连杆上的摩擦块也就远离了运行轨道,制动效果便停止了。
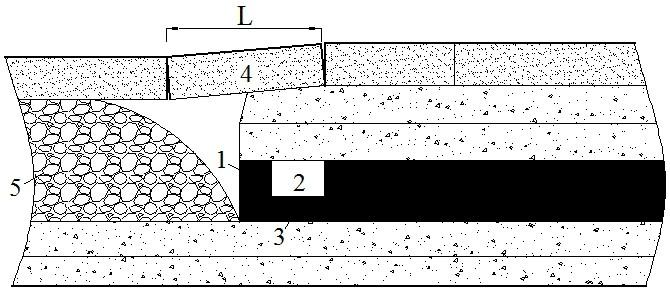
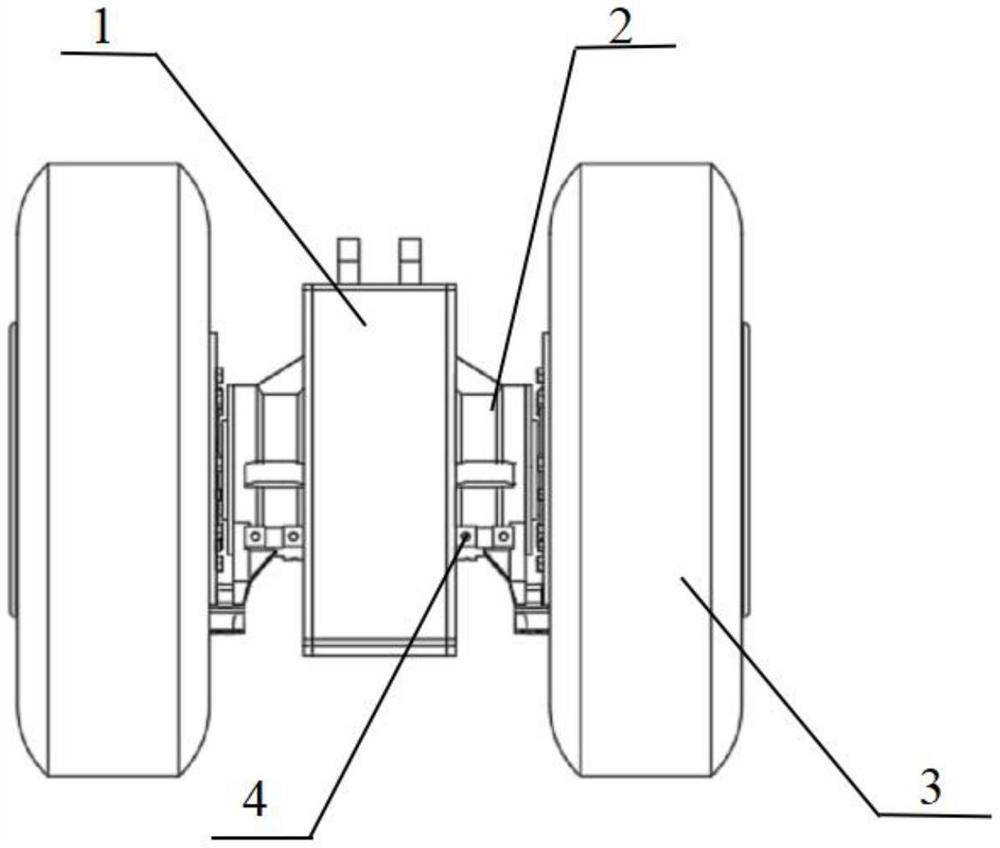
机器人的安装:首先将机器人往工字钢方向抬,辅助轮在接触工字梁后,会对限位轴产生一个向下的力(这里采用辅助轮的设计是为了让机车在行进过程中与工字梁的接触是滚动摩擦,也是为了防止运动过程中机车的前后晃动),进而牵动连杆一和连杆二做出往里面夹紧的运动,当限位轴下移到一定距离后,卡扣借助弹簧弹力顺势弹出,卡住在箱体上,由此便固定住了行走机构的运动,行走轮也正好夹在了工字钢4(单轨吊轨道是工字钢结构)上,如图7所示,此时,机器人可沿着单轨带轨道行走。
机器人的步骤:扭松制动部件支撑杆上的螺母紧固件,拔掉制动部件上的卡位销,转动旋转套筒,使制动装置处于张开状态,如图8所示,此时,将机器人稍微抬起一点,按下行走机构限位轴上的卡扣,限位轴在没有受到约束后就会在弹簧的弹力作用下向上弹出,行走轮架在连杆一和连杆二的推动下会向外张开,这样便可以将机器人从工字钢上取下来。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者终端设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者终端设备所固有的要素。在没有更多限制的情况下,由语句“包括……”或“包含……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者终端设备中还存在另外的要素。此外,在本文中,“大于”、“小于”、“超过”等理解为不包括本数;“以上”、“以下”、“以内”等理解为包括本数。
尽管已经对上述各实施例进行了描述,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改,所以以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利保护范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围之内。
一种便携式轻型单轨辅助运输机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0