







专利摘要
本发明涉及一种缆车吊车自动化控制方法,该方法包括:1)提供设置在每一个缆车吊车上的缆车吊车自动化控制系统,以及2)使用所述系统进行控制,所述系统包括吊车载重检测设备、温度检测设备、吊车平衡子系统、风口调节子系统和主控制器,所述主控制器与所述吊车载重检测设备、所述温度检测设备、所述吊车平衡子系统和所述风口调节子系统分别连接,基于所述吊车载重检测设备的载重检测结果控制所述吊车平衡子系统以平衡缆车吊车,并基于所述温度检测设备的温度检测结果控制所述风口调节子系统以调节缆车吊车的风口风向。
权利要求
1.一种缆车吊车自动化控制方法,该方法可以包括:
1)提供设置在每一个缆车吊车上的缆车吊车自动化控制系统,以及
2)使用所述系统进行控制,其特征在于,所述系统包括吊车载重检测设备、温度检测设备、吊车平衡子系统、风口调节子系统和主控制器,所述主控制器与所述吊车载重检测设备、所述温度检测设备、所述吊车平衡子系统和所述风口调节子系统分别连接,基于所述吊车载重检测设备的载重检测结果控制所述吊车平衡子系统以平衡缆车吊车,并基于所述温度检测设备的温度检测结果控制所述风口调节子系统以调节缆车吊车的风口风向,
所述系统还包括:
用户输入设备,设置在缆车吊车的车体靠近车门一端的内侧,根据用户的操作,输入预设最低温度、预设两端最大载重差值和预设最小张力阈值;
存储器,设置在缆车吊车的车体靠近车门一端的内侧,与所述用户输入设备连接,用于接收并存储所述预设最低温度、所述预设两端最大载重差值和所述预设最小张力阈值;
无线通信接口,与所述主控制器连接,以将缆车钢索的张力、最大载重值、载重差值和车内温度实时无线发送给远端的缆车控制管理平台;
钢索张力检测仪,设置在固定缆车吊车的钢索上,用于实时检测并输出缆车钢索的张力;
轨道制动器,与缆车吊车和缆车钢轨连接,用于根据接收到的缆车制动信号控制缆车吊车抱紧在缆车钢轨上;
所述吊车载重检测设备,设置在缆车吊车的车体底部,包括
左侧载重检测仪,设置在缆车吊车的左侧,用于实时检测缆车吊车左侧的载重值;
右侧载重检测仪,设置在缆车吊车的右侧,用于实时检测缆车吊车右侧的载重值;
比较器,与所述左侧载重检测仪和所述右侧载重检测仪分别连接,输出所述左侧载重值和所述右侧载重值中的最大载重值,并输出所述左侧载重值和所述右侧载重值之间的载重差值;
RS-232串口,与所述比较器连接以输出所述最大载重值和所述载重差值;
所述温度检测设备,设置在缆车吊车的车体顶部,用于实时检测并输出缆车吊车的车内温度;
所述吊车平衡子系统,设置在缆车吊车的车体底部、所述吊车载重检测设备的下方,包括
平衡滑块,用于在滑块驱动机构的驱动下在缆车吊车的车体底部两侧来回滑动;
滑块驱动机构,当接收到右侧滑动控制信号时,驱动所述平衡滑块向缆车吊车的车体底部右侧滑动,当接收到左侧滑动控制信号时,驱动所述平衡滑块向缆车吊车的车体底部左侧滑动;
所述风口调节子系统包括
风口,设置在缆车吊车的车体前后两侧,用于缆车吊车内部通风;
挡板机构,设置在风口下方,当接收到垂直风向控制信号时,挡板机构上推,将风口风向从水平方向改为垂直方向,当接收到水平风向控制信号时,挡板机构下推,将风口风向从垂直方向改为水平方向;
所述主控制器设置在缆车吊车的车体靠近车门一端的内侧,与所述存储器、所述钢索张力检测仪、所述轨道制动器、所述RS-232串口、所述温度检测设备、所述滑块驱动机构和所述挡板机构分别连接,当所述缆车钢索的张力小于等于所述预设最小张力阈值时,向所述轨道制动器发出缆车制动信号,当接收到的载重差值大于等于所述预设两端最大载重差值且接收到的最大载重值为左侧载重值时,发出右侧滑动控制信号,当接收到的载重差值大于等于所述预设两端最大载重差值且接收到的最大载重值为右侧载重值时,发出左侧滑动控制信号,当接收到的车内温度小于等于所述预设最低温度时,发出垂直风向控制信号,当接收到的车内温度大于所述预设最低温度时,发出水平风向控制信号,
所述滑块驱动机构为机械手臂形式或弹簧形式,
所述用户输入设备为触摸屏或键盘。
说明书
本发明是申请号为201410709753X、申请日为2014年11月27日、发明名称为“一种缆车吊车自动化控制方法”的专利的分案申请。
技术领域
本发明涉及缆车控制领域,尤其涉及一种缆车吊车自动化控制方法。
背景技术
随着经济的发展和人们生活水平的提高,人们开始有了更多的空闲假期,并开始不满足于在当地度假,而更愿意花费较多开销和精力去异地欣赏他处的风情景观,其中,山区景点是最主要的度假场所之一。
对于山区景点来说,虽然存在以爬山为乐趣的游客人群,然而大部分游客关注的是当地景观以及在山峰时的视野,更愿意将时间花在欣赏景色上,而不是忙碌于登山本身。因此,使用缆车作为游客上下山的交通工具,帮助游客快速达到目的地,从而节省时间进行其他旅游事务,同时运营缆车还能够给当地管理部门带来额外的经济收入,因而,缆车项目是很多山区景点愿意经营的项目之一。
但是,现有技术中的缆车吊车只在吊车本身的设备维护上进行控制,缺乏对游客乘坐舒适度的关怀,从而在运营中游客经常会遇到以下两个问题:(1)游客在缆车吊车内人员分布不均以及人员来回走动,会导致缆车较大程度的倾斜晃动,给游客带来不适;(2)夏天和冬天对缆车车内吹风方向要求不同,夏天需要水平吹风,便于游客直接感受,冬天更需要垂直吹风,在透气的同时保证游客不会着凉,而现有技术中缺乏风向改变机构,导致游客冬天夏天只感受一种风向,从而带来不适。
因此,需要一种缆车吊车自动化控制方法,能够自动平衡缆车吊车两侧重量,保证缆车吊车不会剧烈晃动,同时能够自动调节风口风向,从而提高游客乘坐缆车的舒适度。
发明内容
为了解决上述问题,本发明提供了一种缆车吊车自动化控制方法,改造现有的过于关注缆车设备本身的控制模式,而更关注于游客的个人感受,通过重量检测和平衡技术自动平衡缆车吊车,通过温度检测和风向控制技术自动调节缆车吊车的风口风向,更增加了缆车钢索应力检测设备以对钢索进行实时监控,从而保证游客安全乘坐的同时,避免为游客带来不适。
根据本发明的一方面,提供了一种缆车吊车自动化控制方法,该方法包括:1)提供设置在每一个缆车吊车上的缆车吊车自动化控制系统,以及2)使用所述系统进行控制,所述系统包括吊车载重检测设备、温度检测设备、吊车平衡子系统、风口调节子系统和主控制器,所述主控制器与所述吊车载重检测设备、所述温度检测设备、所述吊车平衡子系统和所述风口调节子系统分别连接,基于所述吊车载重检测设备的载重检测结果控制所述吊车平衡子系统以平衡缆车吊车,并基于所述温度检测设备的温度检测结果控制所述风口调节子系统以调节缆车吊车的风口风向。
更具体地,在所述缆车吊车自动化控制系统中,还包括:用户输入设备,设置在缆车吊车的车体靠近车门一端的内侧,根据用户的操作,输入预设最低温度、预设两端最大载重差值和预设最小张力阈值;存储器,设置在缆车吊车的车体靠近车门一端的内侧,与所述用户输入设备连接,用于接收并存储所述预设最低温度、所述预设两端最大载重差值和所述预设最小张力阈值;无线通信接口,与所述主控制器连接,以将缆车钢索的张力、最大载重值、载重差值和车内温度实时无线发送给远端的缆车控制管理平台;钢索张力检测仪,设置在固定缆车吊车的钢索上,用于实时检测并输出缆车钢索的张力;轨道制动器,与缆车吊车和缆车钢轨连接,用于根据接收到的缆车制动信号控制缆车吊车抱紧在缆车钢轨上;所述吊车载重检测设备,设置在缆车吊车的车体底部,包括左侧载重检测仪,设置在缆车吊车的左侧,用于实时检测缆车吊车左侧的载重值;所述吊车载重检测设备还包括右侧载重检测仪,设置在缆车吊车的右侧,用于实时检测缆车吊车右侧的载重值;所述吊车载重检测设备还包括比较器,与所述左侧载重检测仪和所述右侧载重检测仪分别连接,输出所述左侧载重值和所述右侧载重值中的最大载重值,并输出所述左侧载重值和所述右侧载重值之间的载重差值;所述吊车载重检测设备还包括RS-232串口,与所述比较器连接以输出所述最大载重值和所述载重差值;所述温度检测设备,设置在缆车吊车的车体顶部,用于实时检测并输出缆车吊车的车内温度;所述吊车平衡子系统,设置在缆车吊车的车体底部、所述吊车载重检测设备的下方,包括平衡滑块,用于在滑块驱动机构的驱动下在缆车吊车的车体底部两侧来回滑动;所述吊车平衡子系统还包括滑块驱动机构,当接收到右侧滑动控制信号时,驱动所述平衡滑块向缆车吊车的车体底部右侧滑动,当接收到左侧滑动控制信号时,驱动所述平衡滑块向缆车吊车的车体底部左侧滑动;所述风口调节子系统包括风口,设置在缆车吊车的车体前后两侧,用于缆车吊车内部通风;所述风口调节子系统还包括挡板机构,设置在风口下方,当接收到垂直风向控制信号时,挡板机构上推,将风口风向从水平方向改为垂直方向,当接收到水平风向控制信号时,挡板机构下推,将风口风向从垂直方向改为水平方向;所述主控制器设置在缆车吊车的车体靠近车门一端的内侧,与所述存储器、所述钢索张力检测仪、所述轨道制动器、所述RS-232串口、所述温度检测设备、所述滑块驱动机构和所述挡板机构分别连接,当所述缆车钢索的张力小于等于所述预设最小张力阈值时,向所述轨道制动器发出缆车制动信号,当接收到的载重差值大于等于所述预设两端最大载重差值且接收到的最大载重值为左侧载重值时,发出右侧滑动控制信号,当接收到的载重差值大于等于所述预设两端最大载重差值且接收到的最大载重值为右侧载重值时,发出左侧滑动控制信号,当接收到的车内温度小于等于所述预设最低温度时,发出垂直风向控制信号,当接收到的车内温度大于所述预设最低温度时,发出水平风向控制信号。
更具体地,在所述缆车吊车自动化控制系统中,所述滑块驱动机构为机械手臂形式或弹簧形式。
更具体地,在所述缆车吊车自动化控制系统中,所述风口为设置在缆车吊车的车体前后两侧下端的两个水平开槽。
更具体地,在所述缆车吊车自动化控制系统中,所述用户输入设备为触摸屏或键盘。
更具体地,在所述缆车吊车自动化控制系统中,还包括摄像头,设置在缆车吊车的车体顶部,用于实时拍摄缆车吊车内的游客图像。
附图说明
以下将结合附图对本发明的实施方案进行描述,其中:
图1为根据本发明实施方案示出的缆车吊车自动化控制系统的结构方框图。
图2为根据本发明实施方案示出的缆车吊车自动化控制系统的吊车载重检测设备的结构方框图。
具体实施方式
下面将参照附图对本发明的缆车吊车自动化控制系统的实施方案进行详细说明。
缆车,又称为架空索道,是由驱动机带动钢丝绳,牵引车厢沿着铺设在地表并有一定坡度的轨道上缆车运行,用以提升或下放人员和货物的运输机械。他多用作工矿区、城市或风景游览区的交通工具。
缆车是利用钢绳牵引,实现人员或货物输送目的之设备的统称或一般称谓。缆车的线路选择应避免坡道起伏变化过大,以节省基本建设费用。轨道坡度一般以15°-25°为宜。根据运输量、地形、运距等条件,线路可设计成单轨、双轨、单轨中间加错车道或换乘站等多种形式。缆车车厢的运行速度一般不大于每小时13公里。
为适应线路的地形条件和乘坐舒适,载人车厢的座椅应与水平面平行并呈阶梯式,以便于人员上下和货物装卸。当车厢在运行中发生超速、过载、越位、停电、断绳等事故时,要有相应的安全措施保证乘客安全。由于缆车对地形的适应性较差,建设费用高,长距离运输效率低,因此他的应用和发展具有一定的特殊性。
游客在乘坐缆车时会发现,现有的缆车控制系统忽略了对游客个人感受的相关设施建设,例如,缺少重量平衡设备,又例如缺少风向控制设备,这些设备的缺乏都会给游客带来较差的乘坐环境。
本发明的缆车吊车自动化控制系统,不仅在安全性能上对缆车本身进行相应检测,更着重于对游客的平衡感和受风方向进行考虑,通过相关的自动化电子设备建造了一个更完善更智能化的缆车控制系统。
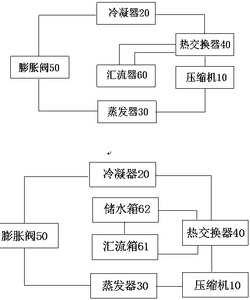
图1为根据本发明实施方案示出的缆车吊车自动化控制系统的结构方框图,所述系统包括:吊车载重检测设备1、温度检测设备2、吊车平衡子系统4、风口调节子系统5和主控制器3,所述主控制器3与所述吊车载重检测设备4、所述温度检测设备2、所述吊车平衡子系统4和所述风口调节子系统5分别连接,基于所述吊车载重检测设备1的载重检测结果控制所述吊车平衡子系统4以平衡缆车吊车,并基于所述温度检测设备2的温度检测结果控制所述风口调节子系统5以调节缆车吊车的风口风向。
接着,继续对本发明的缆车吊车自动化控制系统的具体结构进行进一步的说明。
所述缆车吊车自动化控制系统还包括:用户输入设备,设置在缆车吊车的车体靠近车门一端的内侧,根据用户的操作,输入预设最低温度、预设两端最大载重差值和预设最小张力阈值。
所述缆车吊车自动化控制系统还包括:存储器,设置在缆车吊车的车体靠近车门一端的内侧,与所述用户输入设备连接,用于接收并存储所述预设最低温度、所述预设两端最大载重差值和所述预设最小张力阈值。
所述缆车吊车自动化控制系统还包括:无线通信接口,与所述主控制器3连接,以将缆车钢索的张力、最大载重值、载重差值和车内温度实时无线发送给远端的缆车控制管理平台。
所述缆车吊车自动化控制系统还包括:钢索张力检测仪,设置在固定缆车吊车的钢索上,用于实时检测并输出缆车钢索的张力;轨道制动器,与缆车吊车和缆车钢轨连接,用于根据接收到的缆车制动信号控制缆车吊车抱紧在缆车钢轨上。
如图2所示,所述吊车载重检测设备1,设置在缆车吊车的车体底部,包括左侧载重检测仪11,设置在缆车吊车的左侧,用于实时检测缆车吊车左侧的载重值;所述吊车载重检测设备1还包括右侧载重检测仪12,设置在缆车吊车的右侧,用于实时检测缆车吊车右侧的载重值;所述吊车载重检测设备1还包括比较器13,与所述左侧载重检测仪11和所述右侧载重检测仪12分别连接,输出所述左侧载重值和所述右侧载重值中的最大载重值,并输出所述左侧载重值和所述右侧载重值之间的载重差值;所述吊车载重检测设备1还包括RS-232串口14,与所述比较器13连接以输出所述最大载重值和所述载重差值。
所述温度检测设备2,设置在缆车吊车的车体顶部,用于实时检测并输出缆车吊车的车内温度。
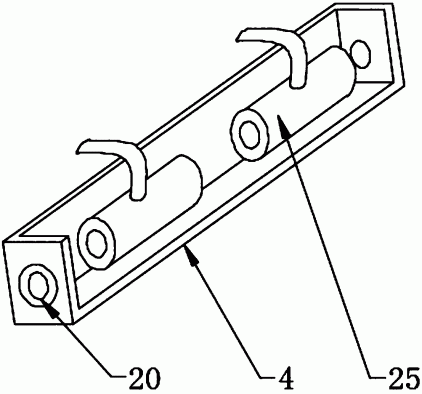
所述吊车平衡子系统4,设置在缆车吊车的车体底部、所述吊车载重检测设备1的下方,包括平衡滑块,用于在滑块驱动机构的驱动下在缆车吊车的车体底部两侧来回滑动;所述吊车平衡子系统4还包括滑块驱动机构,当接收到右侧滑动控制信号时,驱动所述平衡滑块向缆车吊车的车体底部右侧滑动,当接收到左侧滑动控制信号时,驱动所述平衡滑块向缆车吊车的车体底部左侧滑动。
所述风口调节子系统5包括风口,设置在缆车吊车的车体前后两侧,用于缆车吊车内部通风;所述风口调节子系统5还包括挡板机构,设置在风口下方,当接收到垂直风向控制信号时,挡板机构上推,将风口风向从水平方向改为垂直方向,当接收到水平风向控制信号时,挡板机构下推,将风口风向从垂直方向改为水平方向。
所述主控制器3设置在缆车吊车的车体靠近车门一端的内侧,与所述存储器、所述钢索张力检测仪、所述轨道制动器、所述RS-232串口14、所述温度检测设备2、所述滑块驱动机构和所述挡板机构分别连接。
所述主控制器3实现以下操控:当所述缆车钢索的张力小于等于所述预设最小张力阈值时,向所述轨道制动器发出缆车制动信号,当接收到的载重差值大于等于所述预设两端最大载重差值且接收到的最大载重值为左侧载重值时,发出右侧滑动控制信号,当接收到的载重差值大于等于所述预设两端最大载重差值且接收到的最大载重值为右侧载重值时,发出左侧滑动控制信号,当接收到的车内温度小于等于所述预设最低温度时,发出垂直风向控制信号,当接收到的车内温度大于所述预设最低温度时,发出水平风向控制信号。
其中,在所述缆车吊车自动化控制系统中,所述滑块驱动机构可选为机械手臂形式或弹簧形式,所述风口可选为设置在缆车吊车的车体前后两侧下端的两个水平开槽,所述用户输入设备可选为触摸屏或键盘,所述缆车吊车自动化控制系统还可以包括摄像头,设置在缆车吊车的车体顶部,用于实时拍摄缆车吊车内的游客图像。
另外,RS-232串口是个人计算机上的通讯接口之一,由电子工业协会(Electronic Industries Association,EIA)所制定的异步传输标准接口。通常RS-232接口以9个引脚(DB-9)或是25个引脚(DB-25)的型态出现,一般个人计算机上会有两组RS-232接口,分别称为COM1和COM2。
RS-232-C是美国电子工业协会EIA(Electronic Industry Association)制定的一种串行物理接口标准。RS是英文“推荐标准”的缩写,232为标识号,C表示修改次数。RS-232-C总线标准设有25条信号线,包括一个主通道和一个辅助通道。在多数情况下主要使用主通道,对于一般双工通信,仅需几条信号线就可实现,如一条发送线、一条接收线及一条地线。RS-232-C标准规定的数据传输速率为50、75、100、150、300、600、1200、2400、4800、9600、19200、38400波特。
RS-232-C标准规定,驱动器允许有2500pF的电容负载,通信距离将受此电容限制,例如,采用150pF/m的通信电缆时,最大通信距离为15m;若每米电缆的电容量减小,通信距离可以增加。传输距离短的另一原因是RS-232属单端信号传送,存在共地噪声和不能抑制共模干扰等问题,因此一般用于20m以内的通信。
串行通信接口标准经过使用和发展,目前已经有几种。但都是在RS-232标准的基础上经过改进而形成的。所以,以RS-232C为主来讨论。RS-232C标准是美国EIA(电子工业联合会)与BELL等公司一起开发的通信协议。他适合于数据传输速率在0-20000b/s范围内的通信。这个标准对串行通信接口的有关问题,如信号线功能、电气特性都作了明确规定。由于通信设备厂商都生产与RS-232C制式兼容的通信设备,因此,他作为一种标准,目前已在微机通信接口中广泛采用。
采用本发明的缆车吊车自动化控制系统,针对现有缆车控制系统缺乏考虑游客舒适度的技术问题,通过自动检测缆车吊车两端承重来实现缆车吊车平衡,通过自己检测缆车吊车车内温度以决定吊车风口风向的控制,同时张力检测设备的使用也帮助缆车进一步提高安全系数,本发明有效地为缆车游客建造了一个更为舒适的乘坐环境,进一步完善了缆车控制系统。
可以理解的是,虽然本发明已以较佳实施例披露如上,然而上述实施例并非用以限定本发明。对于任何熟悉本领域的技术人员而言,在不脱离本发明技术方案范围情况下,都可利用上述揭示的技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均仍属于本发明技术方案保护的范围内。
一种缆车吊车自动化控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0