

IPC分类号 : G01C21/16,G01C21/20,G01C21/00,G01S13/90,G01S7/40









专利摘要
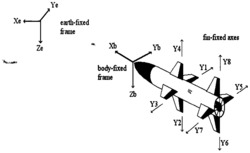
本发明公开了一种基于相对捷联解算的机载分布式POS传递对准方法,其目的在于提高动态环境下机载分布式POS空间运动信息测量精度。该方法为:利用主子系统当前及前N个采样时刻陀螺仪输出的角速度和基于圆锥运动所推导的旋转矢量误差补偿系数来构造伪单子样旋转矢量,并基于旋转矢量实时求解相对姿态四元数实现相对姿态更新;同时,根据主子系统空间位置矢量关系建立相对速度和位置更新算法,利用主子系统加速度计输出比力和相对姿态实现相对速度和位置更新;最后,基于相对捷联解算误差微分方程和光纤光栅测量的三维相对位置和三维相对姿态建立传递对准状态模型和量测模型,采用线性卡尔曼滤波估计方法进行传递对准,获得高精度运动信息。
权利要求
1.一种基于相对捷联解算的机载分布式POS传递对准方法,其特征在于,包括以下步骤:
(1)建立基于伪单子样旋转矢量的相对姿态更新算法:利用主子系统当前及前N个采样时刻陀螺仪输出的角速度建立伪单子样旋转矢量,并采用典型圆锥运动推导旋转矢量误差补偿系数,通过求解旋转矢量的方式实时获得相对姿态四元数,从而实现相对姿态更新;
(2)建立相对速度更新算法:根据主子系统空间位置矢量关系建立主系统、子系统和主子系统相对位置三者间的矢量方程,相对惯性坐标系求二阶导数,得到相对速度微分方程,并基于主子系统加速度计测量的比力信息以及相对姿态信息对相对速度微分方程求数值解,从而实现相对速度更新;
(3)建立相对位置更新算法:基于相对位置与相对速度之间的微分关系,建立相对位置微分方程,利用已求解的相对速度对位置微分方程求数值解实现相对位置更新;
(4)建立传递对准算法:基于相对捷联解算误差传播公式和光纤光栅测量的三维相对位置和三维相对姿态建立传递对准状态模型和量测模型,并采用线性卡尔曼滤波估计方法进行传递对准,并对相对捷联解算结果进行反馈校正,获得高精度运动信息;相对捷联解算误差传播公式由相对姿态误差微分方程、相对速度误差微分方程和相对位置误差微分方程联立得到;
步骤(1)所述的建立基于伪单子样旋转矢量的相对姿态更新算法的具体方案如下:
假设当前
在姿态更新周期
其中,
式中,
步骤(1)所述的建立基于伪单子样旋转矢量的相对姿态更新算法,采用当前及前
式中,
由于上式的直接输入量为主、子系统之间的相对角速度,伪单子样旋转矢量相对姿态更新算法改写为最终形式如下:
式中,
步骤(2)所述的相对速度更新算法包括以下内容:
定义主系统在惯性坐标系的位置矢量为
对上式相对惯性坐标系
式中,
对上式相对惯性坐标系
主子系统测量的比力方程:
式中,
将上式投影到
由于
可得子系统相对主系统的绝对速度微分方程:
对上式中的速度微分方程求数值解,并根据
2.根据权利要求1所述的基于相对捷联解算的机载分布式POS传递对准方法,其特征在于,步骤(3)所述的相对位置更新算法包括以下内容:
相对位置由相对速度通过积分得到,因此相对位置微分方程表示为:
将上式投影在主系统载体坐标系
对上式中的相对位置微分方程求数值解,实现主子系统之间相对位置
3.根据权利要求1所述的基于相对捷联解算的机载分布式POS传递对准方法,其特征在于,步骤(4)所述的传递对准算法包括以下内容:根据相对捷联解算误差传播公式,得到传递对准的状态模型,取状态向量为:
式中,
状态模型描述为:
式中,
系统矩阵
系统噪声驱动矩阵
采用相对位置和相对姿态匹配的方式进行传递对准,传递对准的量测向量为:
式中,
根据计算得到的三维相对姿态
式中,
根据计算得到的三维相对位置
根据传递对准量测向量表达式,建立传递对准量测模型:
式中,
一种基于相对捷联解算的机载分布式POS传递对准方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0