

![2-[5-(氮唑-1-基)噻唑-2-亚氨基]噻唑啉酮及其制备方法与应用](https://www.zhichawang.com/youzhi22/CN106608874A/CN106608874A.jpg)






专利摘要
一种可垂直起降的无人机的控制方法。本发明控制无人机起飞降落时运行在垂直起降模式,通过垂直起降系统起飞或降落;在无人机上升到一定高度飞行的过程中,控制无人机运行在固定翼模式,通过倾斜设置的固定翼推进装置输出驱动力驱动无人机飞行,节省驱动能耗。本发明所提供的无人机控制方法,飞行所需能耗更低,且由于垂直起降系统的设置,能够方便的在较小的空间内进行起降。
权利要求
1.一种可垂直起降的无人机的控制方法,其特征在于,所述无人机包括固定翼系统、尾部斜推支撑架、固定翼推进装置、垂直起降系统,所述固定翼系统(1),其包括分别位于无人机机身中部左右两侧的机翼,以及设置在无人机机身后方的尾翼,其中,尾翼与无人机机身之间连接有尾杆(13);
所述尾部斜推支撑架(11),其垂直设置在尾杆(13)上;
所述固定翼推进装置(12),其设置在所述尾部斜推支撑架(11)的上端,在无人机飞行过程中运行在固定翼模式,输出驱动力驱动无人机飞行;
所述垂直起降系统(2),其设置在无人机机身上,在无人机起飞和/或降落的过程中运行在垂直起降模式,驱动螺旋桨旋转带动无人机起飞或降落;
所述垂直起降系统(2)包括:
碳纤维管(21),其包括分别与无人机机身固定连接的4个,4个碳纤维管(21)分别对称的设置在无人机机身的左右两侧;
电机安装板(22),其分别水平的设置在各所述碳纤维管(21)的远端,所述电机安装板(22)平行于所述无人机的机身;
电机,其固定在各所述电机安装板(22)上,具有电机轴,用于输出扭矩;
螺旋桨驱动轴,其分别连接各所述电机的电机轴,所述螺旋桨驱动轴垂直向上设置在无人机的电机安装板(22)上,由所述电机轴驱动运转;
螺旋桨,其分别连接在各所述螺旋桨驱动轴的顶部,由电机驱动水平旋转,带动无人机起飞或降落;
所述控制方法步骤包括:
在无人机起飞和/或降落的过程中,控制无人机运行在垂直起降模式,垂直起降模式下,垂直起降系统(2)中的电机运转,由螺旋桨驱动轴传动,带动分别设置在无人机机身左右两侧的螺旋桨水平旋转,螺旋桨水平旋转向下推出气流带动无人机起飞或降落;
在无人机飞行的过程中,控制无人机运行在固定翼模式,固定翼模式下,固定翼推进装置(12)倾斜向前并向下输出驱动力,无人机左右两侧的机翼以及后方的尾翼在无人机的上方和下方形成压差,产生气流冲击效应,为无人机提供升力,固定翼推进装置(12)中前高后低倾斜设置的螺旋桨倾斜旋转驱动无人机向前飞行;所述控制方法还包括如下步骤:
步骤F1,根据垂直起降系统所对应的坐标系,设定固定翼系统所对应的坐标系为具有与垂直起降系统所对应的坐标系相同的机头方向;
步骤F2,在无人机起飞和/或降落的过程中,驱动螺旋桨旋转带动无人机起飞或降落;在无人机飞行至目标高度的过程中,根据垂直起降系统所对应的坐标系调整无人机飞行至航路所对应的经纬度和高度;
步骤F3,在无人机飞行的过程中,当无人机到达航路所对应的经纬度和高度时,切换至固定翼模式,控制固定翼推进装置(12)输出驱动力驱动无人机沿该航路所对应的经纬度和高度飞行,同时,实时检测无人机的飞行轨迹;
所述无人机机身前端安装有摄像头,在无人机飞行的过程中,还包括如下步骤:
控制摄像头采集航空影像,对所述航空影像按照以下步骤进行目标识别:
步骤D1,利用多分支深度可分离卷积神经网络和Single Shot MultiBox Detector建立目标检测模型;
步骤D2,利用所述目标检测模型,首先对摄像头所采集的航空影像进行3x3卷积,然后对3x3卷积所输出的卷积结果进行深度可分离卷积,再将深度可分离卷积所获得的数据输入过滤器,随后将过滤器过滤所输出的数据分别顺序进行参数不同的两次深度可分离卷积后输出至全局平均池化层,将全局平均池化层所获得的池化数据输出至全连接层;
步骤D3,根据全连接层所输出的信息标识摄像头所采集的航空影像中的目标。
2.如权利要求1所述的可垂直起降的无人机的控制方法,其特征在于,无人机起飞、降落以及飞行的过程中,还控制定位单元接收卫星信号,根据卫星信号进行RTK差分定位,标记图传设备所采集的图像对应的位置。
说明书
技术领域
本发明涉及飞行设备领域,具体而言涉及一种可垂直起降的无人机的控制方法。
背景技术
随着多旋翼无人机应的越来越广泛,无人机开始被人熟知。于此同时,无人机在民用领域、商业领域开始崭露头角。但是现在各种无人机各有各的优点,优势各有不同而且功能单一。
比如目前应用较多的多旋翼无人机,具有垂直起降,空中悬停的功能,灵活性强,能够完成短小距离范围的飞行任务。受到电池技术发展的限制,目前多旋翼无人机的续航,高空,高远程表现欠佳。而传统固定翼飞机有载重大续航远等特点,可是其对于起飞条件具有苛刻要求,往往需要较长距离进行滑跑。
现有可垂直起降的固定翼飞机,功能单一且续航不足。而固定翼无人机起降限制较大,难以大范围应用,并且无法快速搭载各种设备,使用成本高。
发明内容
本发明针对现有技术的不足,提供一种可垂直起降的无人机的控制方法,本发明具体采用如下技术方案。
首先,为实现上述目的,提出一种可垂直起降的无人机的控制方法,所述无人机包括固定翼系统、尾部斜推支撑架、固定翼推进装置、垂直起降系统,其控制方法步骤包括:
在无人机起飞和/或降落的过程中,控制无人机运行在垂直起降模式,垂直起降模式下,垂直起降系统(2)中的电机运转,由螺旋桨驱动轴传动,带动分别设置在无人机机身左右两侧的螺旋桨水平旋转,螺旋桨水平旋转向下推出气流带动无人机起飞或降落;
在无人机飞行的过程中,控制无人机运行在固定翼模式,固定翼模式下,固定翼推进装置(12)倾斜向前并向下输出驱动力,无人机左右两侧的机翼以及后方的尾翼在无人机的上方和下方行程压差,产生气流冲击效应,为无人机提供升力,固定翼推进装置(12)中前高后低倾斜设置的螺旋桨倾斜旋转驱动无人机向前飞行。
可选地,无人机起飞、降落以及飞行的过程中,还控制定位单元接收卫星信号,根据卫星信号进行RTK差分定位,标记图传设备所采集的图像对应的位置。
可选地,还包括如下步骤:
步骤F1,根据垂直起降系统所对应的坐标系,设定固定翼系统所对应的坐标系为具有与垂直起降系统所对应的坐标系相同的机头方向;
步骤F2,在无人机起飞和/或降落的过程中,驱动螺旋桨旋转带动无人机起飞或降落;在无人机飞行至目标高度的过程中,根据垂直起降系统所对应的坐标系调整无人机飞行至航路所对应的经纬度和高度;
步骤F3,在无人机飞行的过程中,当无人机到达航路所对应的经纬度和高度时,切换至固定翼模式,控制固定翼推进装置(12)输出驱动力驱动无人机沿该航路所对应的经纬度和高度飞行,同时,实时检测无人机的飞行轨迹。
可选地,在无人机飞行的过程中,还包括如下步骤:
控制摄像头采集航空影像,对所述航空影像按照以下步骤进行目标识别:
步骤D1,利用多分支深度可分离卷积神经网络和Single Shot MultiBoxDetector建立目标检测模型;
步骤D2,利用所述目标检测模型,首先对摄像头所采集的航空影像进行3x3卷积,然后对3x3卷积所输出的卷积结果进行深度可分离卷积,再将深度可分离卷积所获得的数据输入过滤器,随后将过滤器过滤所输出的数据分别顺序进行参数不同的两次深度可分离卷积后输出至全局平均池化层,将全局平均池化层所获得的池化数据输出至全连接层;
步骤D3,根据全连接层所输出的信息标识摄像头所采集的航空影像中的目标。
如权利要求1所述的无人机的控制方法,其特征在于,
所述固定翼系统(1),其包括分别位于无人机机身中部左右两侧的机翼,以及设置在无人机机身后方的尾翼,其中,尾翼与无人机机身之间连接有尾杆(13);
所述尾部斜推支撑架(11),其垂直设置在尾杆(13)上;
所述固定翼推进装置(12),其设置在所述尾部斜推支撑架(11)的上端,在无人机飞行过程中运行在固定翼模式,输出驱动力驱动无人机飞行;
所述垂直起降系统(2),其设置在无人机机身上,在无人机起飞和/或降落的过程中运行在垂直起降模式,驱动螺旋桨旋转带动无人机起飞或降落;
所述垂直起降系统(2)包括:
碳纤维管(21),其包括分别与无人机机身固定连接的4个,4个碳纤维管(21)分别对称的设置在无人机机身的左右两侧;
电机安装板(22),其分别水平的设置在各所述碳纤维管(21)的远端,所述电机安装板(22)平行于所述无人机的机身;
电机,其固定在各所述电机安装板(22)上,具有电机轴,用于输出扭矩;
螺旋桨驱动轴,其分别连接各所述电机的电机轴,所述螺旋桨驱动轴垂直向上设置在无人机的电机安装板(22)上,由所述电机轴驱动运转;
螺旋桨,其分别连接在各所述螺旋桨驱动轴的顶部,由电机驱动水平旋转,带动无人机起飞或降落。
有益效果
本发明在无人机机身上同时设置固定翼系统和垂直起降系统,在起飞降落时控制无人机运行在垂直起降模式,通过垂直起降系统起飞或降落;在无人机上升到一定高度飞行的过程中,控制无人机运行在固定翼模式,通过倾斜设置的固定翼推进装置输出驱动力驱动无人机飞行,节省驱动能耗。本发明所提供的无人机结构,方便搭载装卸各类外接设备,飞行所需能耗更低,且由于垂直起降系统的设置,能够方便的在较小的空间内进行起降。
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,并与本发明的实施例一起,用于解释本发明,并不构成对本发明的限制。在附图中:
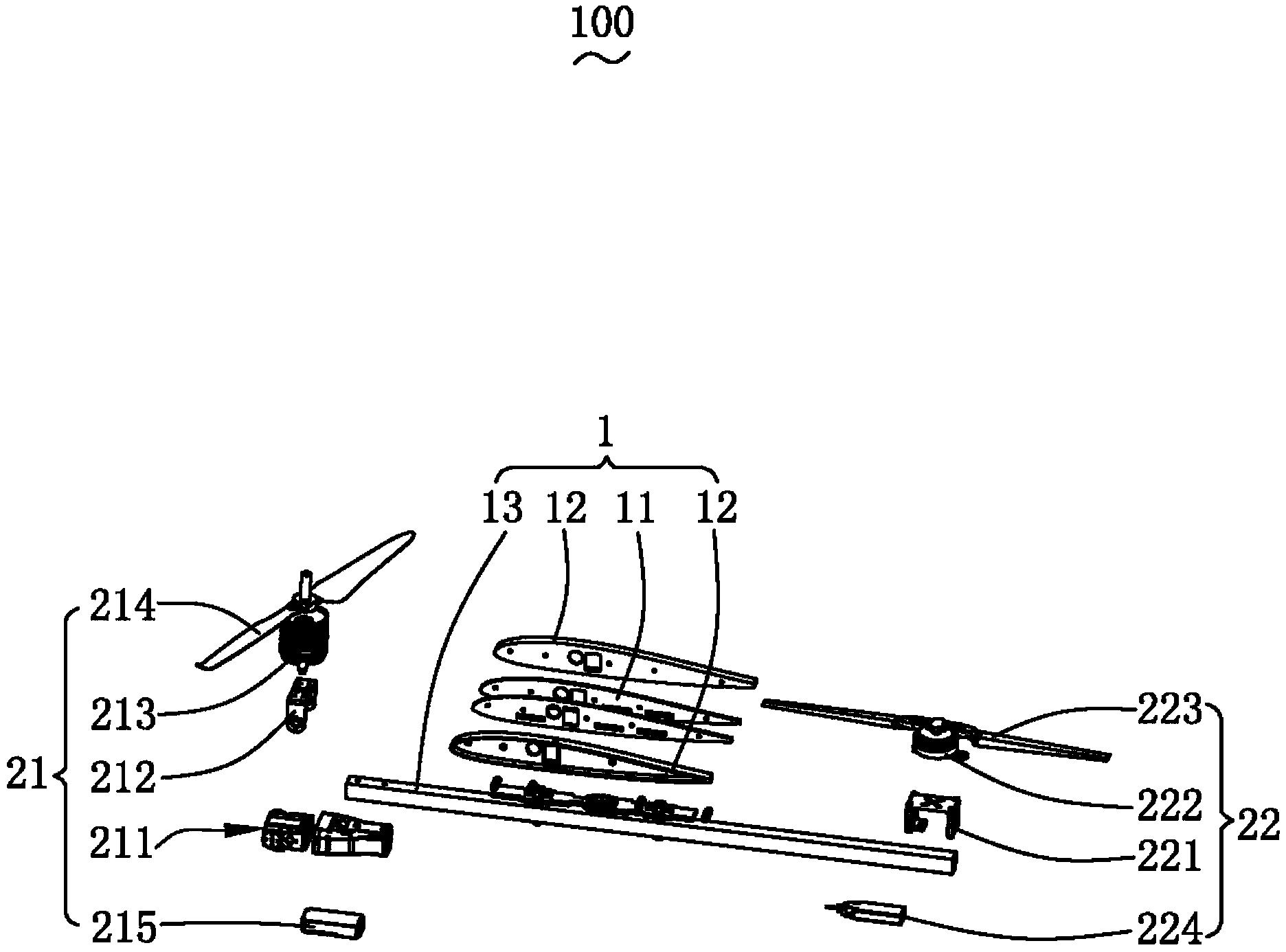
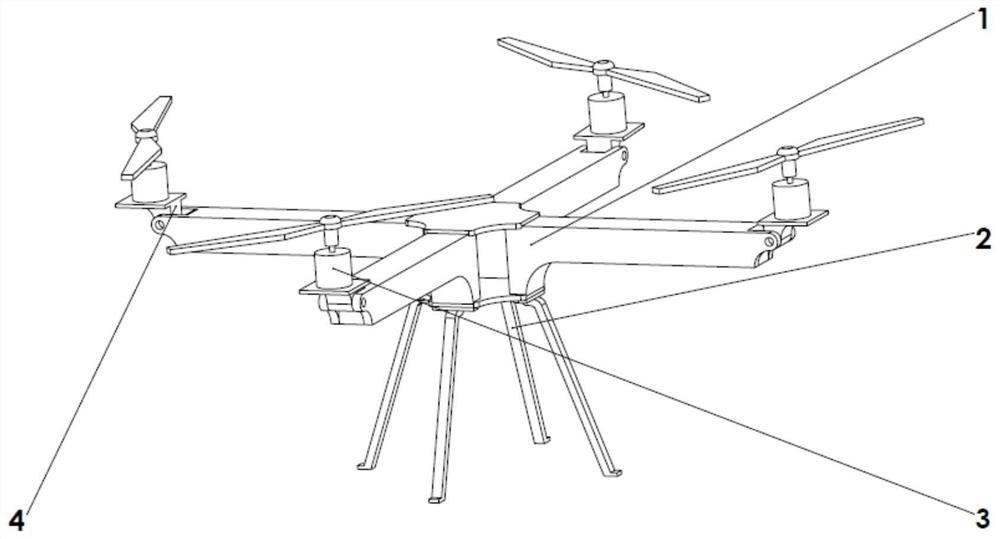
图1是本发明的无人机的整体结构示意图;
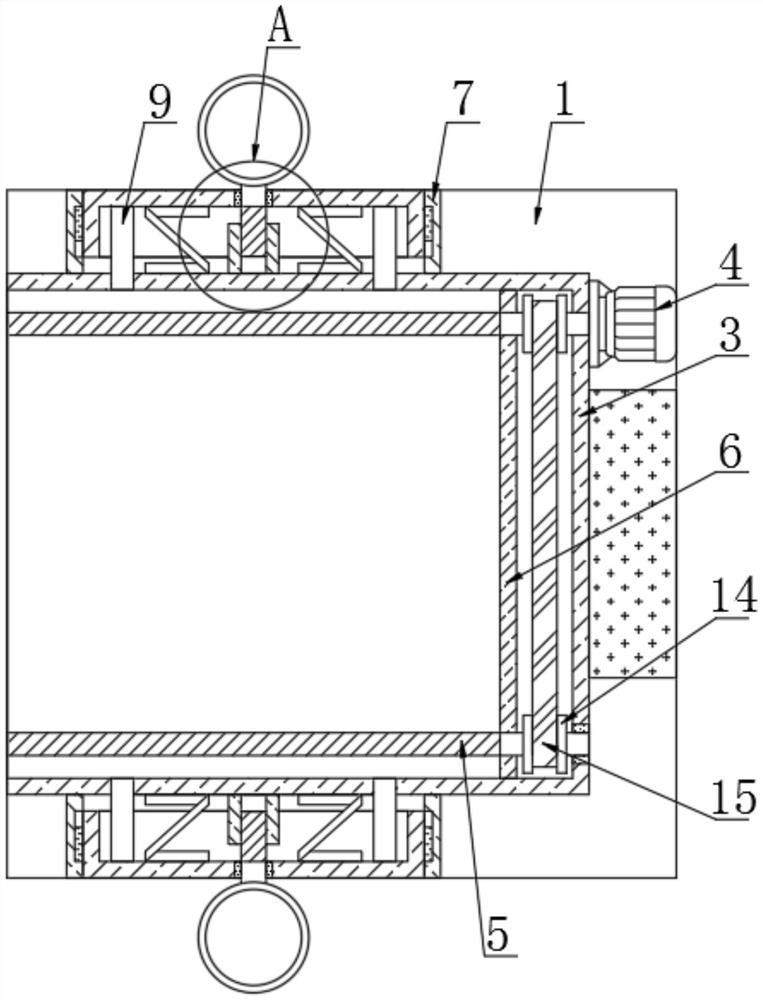
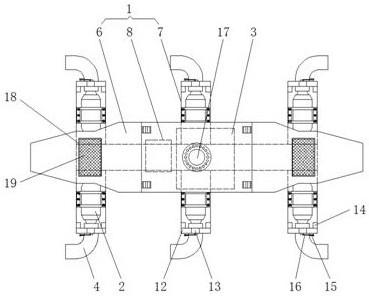
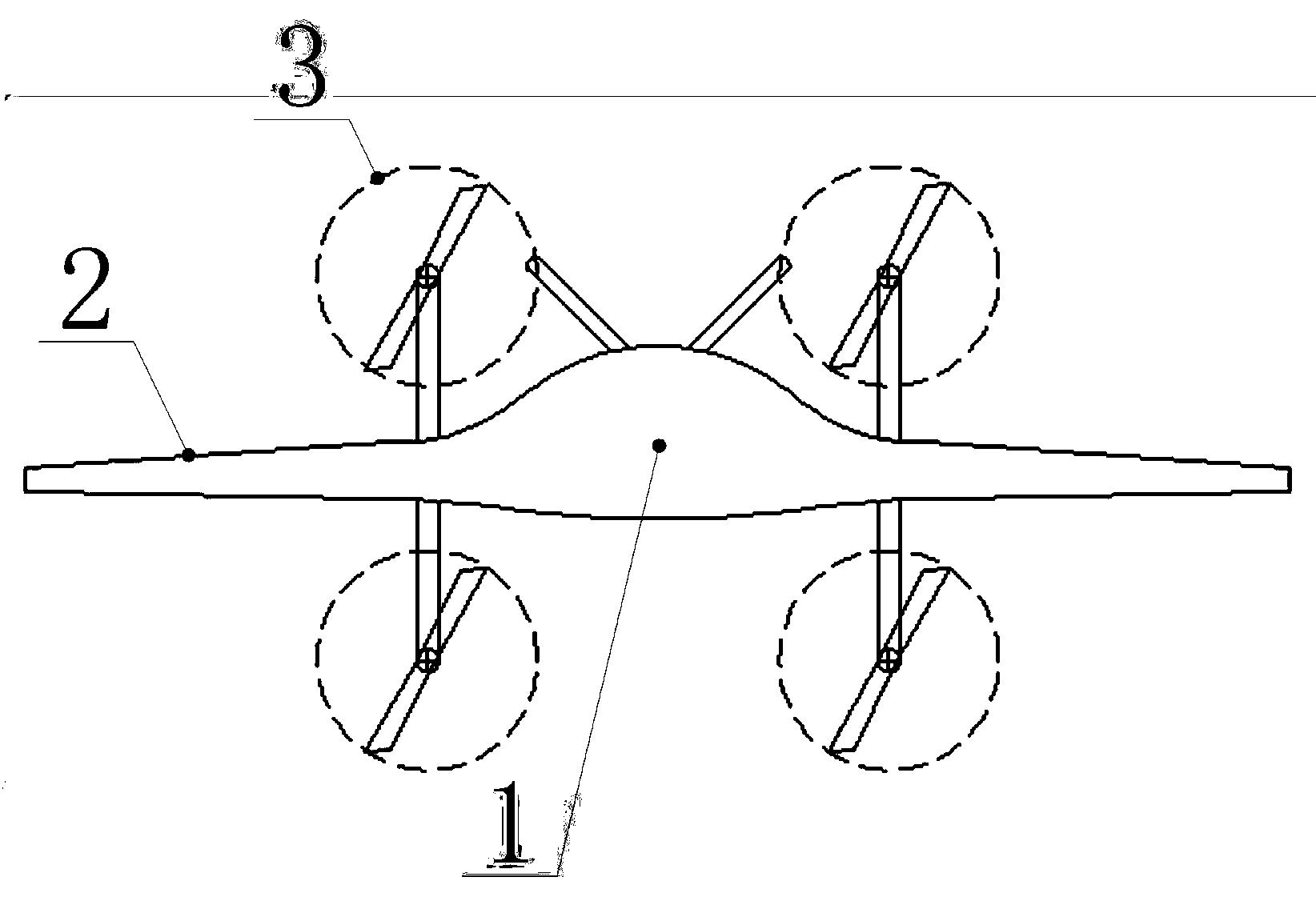
图2是本发明的无人机中挂载系统的示意图;
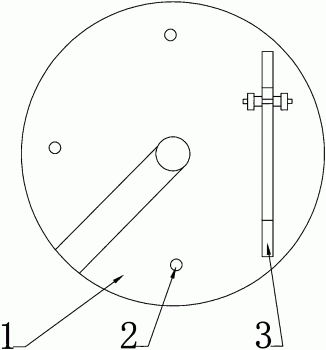
图3是本发明中挂载系统的快拆挂载板的示意图;
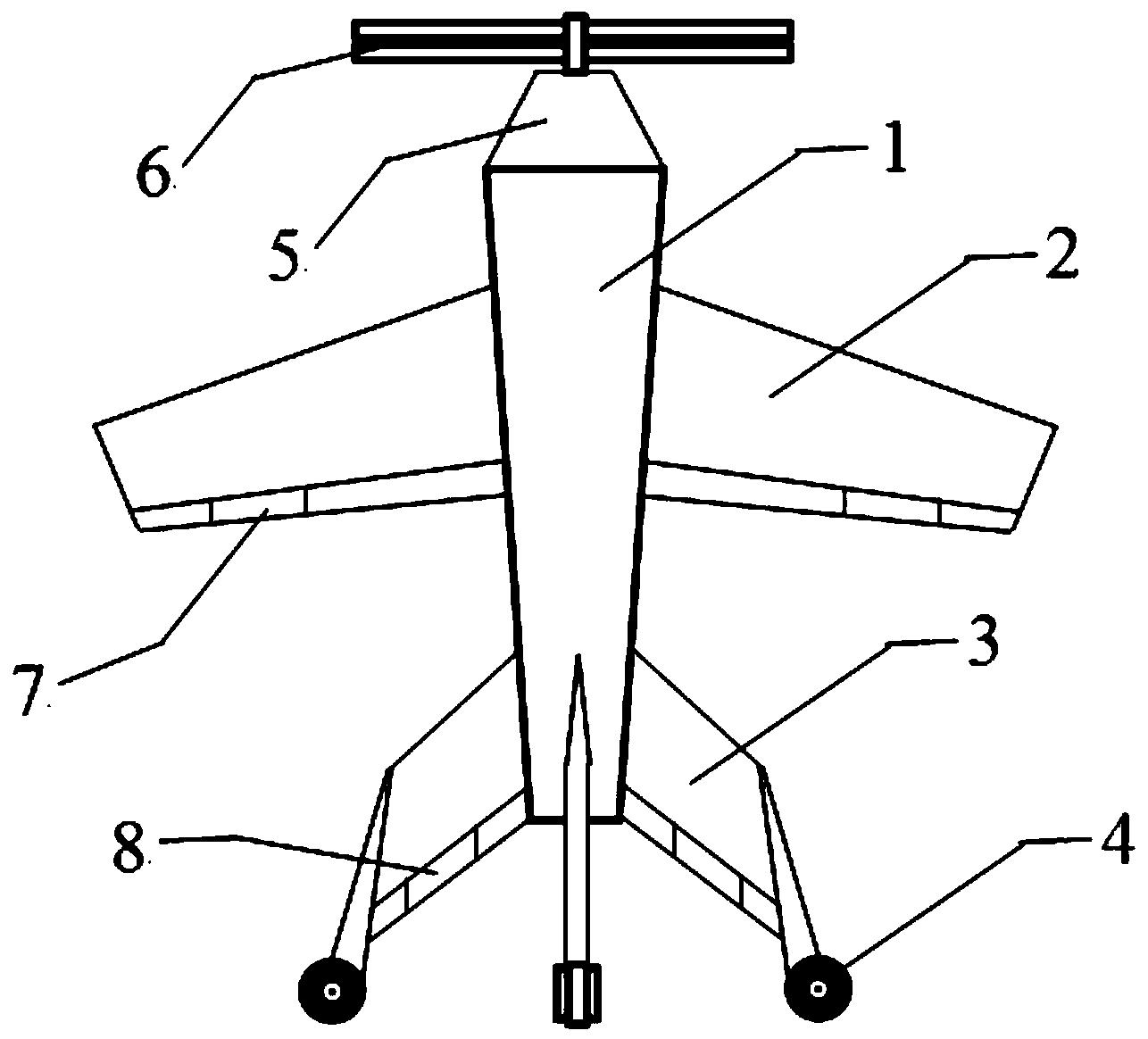
图4是本发明的无人机的整体结构在另一视角下的示意图;
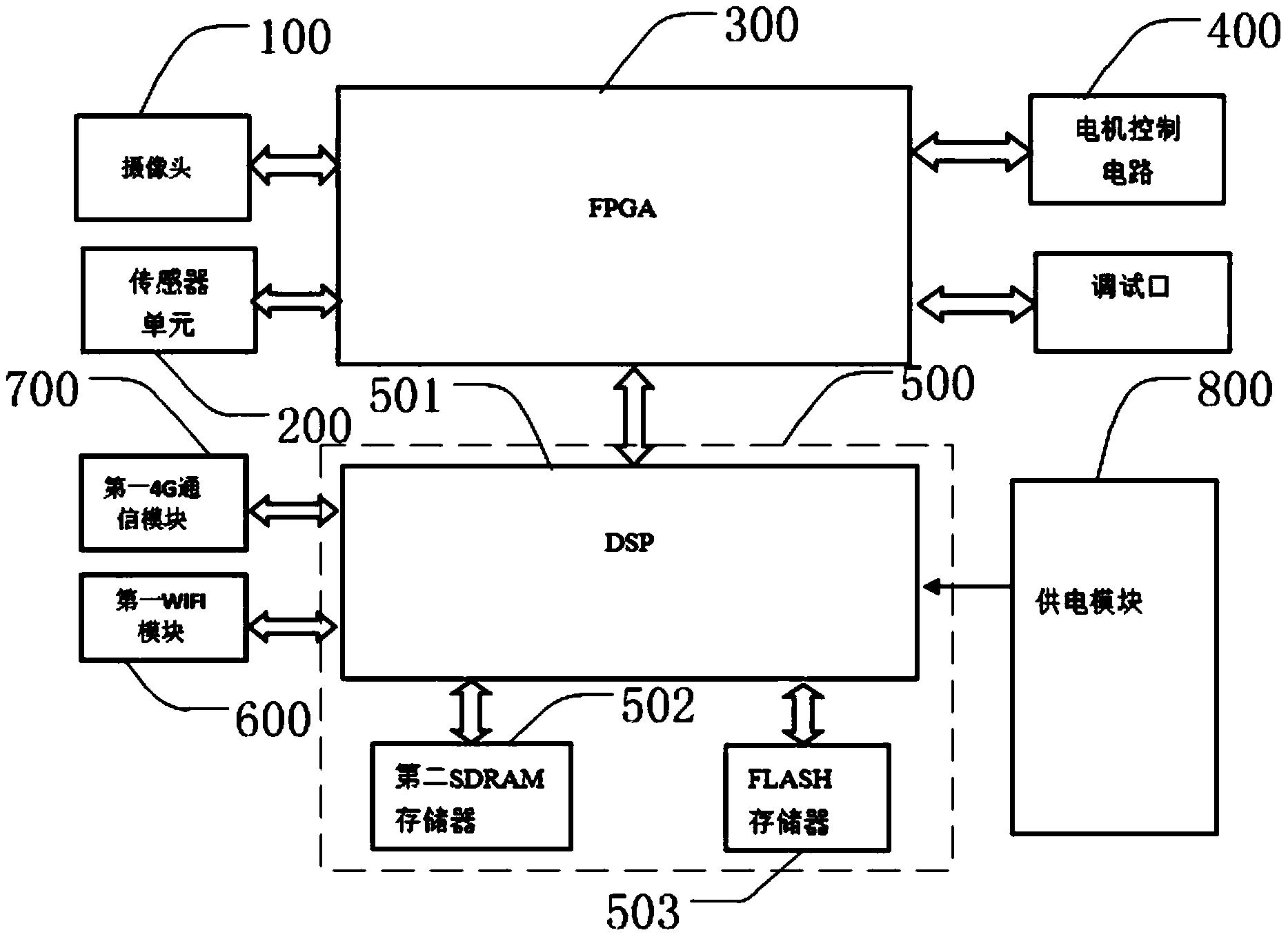
图5是本发明的无人机中所采用的MBDSCNN结构的示意图;
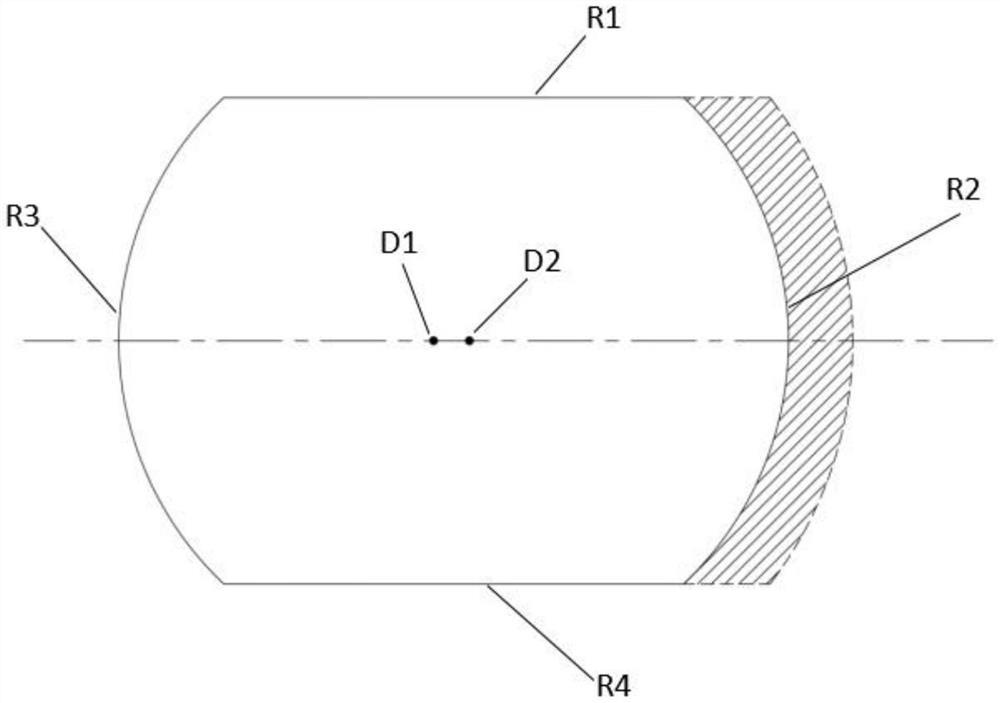
图6是本发明的无人机设定固定翼系统所对应的坐标系的过程的示意图;
图7是本发明的无人机自动飞行过程所行程的飞行轨迹的示意图。
图中,1表示固定翼系统;11表示尾部斜推支撑架;12表示固定翼推进装置;13表示尾杆;2表示垂直起降系统;21表示碳纤维管;22表示电机安装板;3表示挂载架;31表示挂载架安装板;32表示挂载固定杆;41表示快拆挂载板;42表示挂载板。
具体实施方式
为使本发明实施例的目的和技术方案更加清楚,下面将结合本发明实施例的附图,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
图1为根据本发明的一种无人机,其包括图1以及图4所示的:
固定翼系统1,其包括分别位于无人机机身中部左右两侧的机翼,以及设置在无人机机身后方的尾翼,其中,尾翼与无人机机身之间连接有尾杆13;
尾部斜推支撑架11,其垂直设置在尾杆13上;
固定翼推进装置12,其设置在所述尾部斜推支撑架11的上端,在无人机飞行过程中运行在固定翼模式,输出驱动力驱动无人机飞行;
垂直起降系统2,其设置在无人机机身上,在无人机起飞和/或降落的过程中运行在垂直起降模式,驱动螺旋桨旋转带动无人机起飞或降落;
其中,所述垂直起降系统2主要由四轴系统构成,包括:
碳纤维管21,其包括分别与无人机机身固定连接的4个,4个碳纤维管21分别对称的设置在无人机机身的左右两侧;
电机安装板22,其分别水平的设置在各所述碳纤维管21的远端,所述电机安装板22平行于所述无人机的机身;
电机,其固定在各所述电机安装板22上,具有电机轴,用于输出扭矩;
螺旋桨驱动轴,其分别连接各所述电机的电机轴,所述螺旋桨驱动轴垂直向上设置在无人机的电机安装板22上,由所述电机轴驱动运转;
螺旋桨,其分别连接在各所述螺旋桨驱动轴的顶部,由电机驱动水平旋转,带动无人机起飞或降落。
其中,本无人机主体采用轴距450大小的H型机架,主体为整个固定翼的主体,其中装有飞控主板、电池、分电板和图传设备,飞控为赫星orange cube 升级版PIXHAWK2开源飞控自驾仪内置IMU加热系统,低温环境保持恒温作业。完全兼容RTK差分GPS,厘米级精确定位。IMU内置隔离减震,性能稳定。支持固定翼,垂直起降固定翼。其定高主要靠主板上气压计和IMU里面的气压计构成双气压计的设计,这部分主要用来优化气压定高的功能。Pixhawk 的硬件专门拓展出了Edison的接口,可以加装Edison板子直接插在主板飞控主板上来进行其他任务的计算。可设置定高、定点和一键返航。电池选用格氏ACE TATTU 6s 22.2v 30000mah 25c锂电池,拥有超长续航时间。分电板选用GEPRC PDB-XT60 分电板 含XT60 集成BEC高效率5V/2A 12V/0.5A线性,通过BEC口可以为更多设备供电。图传设备采用5.8G无线图传比2.4G无线图传的抗干扰能力强,由于遥控器采用2.4G频段因此5.8G无线图传能更利于处理了信号接收和发射。
所述的固定翼系统1中的固定翼推进装置12,其推进方向与所述尾部斜推支撑架11之间形成有斜推角度,所述斜推角度为锐角。在较为优选的方式下,其可设置为前高后低倾斜设置的螺旋桨,其倾斜向前并向下输出驱动力驱动无人机飞行。
固定翼系统使得无人机的作业效率得到提高。其原因在于,固定翼系统能够使得无人机气动效率提高,使得续航时间较长,故飞行距离较远。由于固定翼获取升力来源于机翼上下空气流动导致的压差和气流冲击效应,所以固定翼无人机在高原气密度较低的环境中仍可以靠应用。本固定翼无人机整体骨架采用碳纤维材质,极大的减少了机身重量大大提高了续航能力。其抗风能力为5级可以全天候执行任务。本固定翼单侧翼展长为180cm,翼展面积为9000cm^2,动力类型是无刷高效电机,地面站采用高性能带GPS的野外电脑。推力系统采用尾部斜推方式。采用这样布局的优点是可以在意外时保护电机和螺旋桨的损坏。结合固定翼何以组合多种任务飞行模式,本无人机有全自动起飞/降落、自动航线规划和飞行安全保障。
上述无人机的机翼下还和设置图2所示的挂载架。所述挂载架3包括:
挂载架安装板31,其分别固定连接在左右两侧机翼的下方,所述挂载架安装板31垂直于所述机翼,并相对无人机机身中轴线对称排列;
挂载固定杆32,其平行于所述机翼,连接在两个挂载架安装板31之间,由两根平行设置的碳管组成支架,用于悬挂挂载板42。
所述的挂载架3中通过图3所示的快拆挂载板41,设备固定至机翼下方。所有外接设备可以直接安装在挂载板上,实现快速装拆。对于一个多功能可垂直起降的固定翼无人机来说,快速装拆的设备可以大大节约时间,实现不同功能之间快速切换,对于突发事件快速反应以及最大限度减少重量非常重要。
其中,所述挂载板42的上端连接有快拆挂载板41,所述快拆挂载板41的上部设置有卡爪,所述卡爪卡接固定在所述挂载固定杆32上,连接并固定所述快拆挂载板41以及快拆挂载板41所连接的挂载板42。
由此,本发明通过在无人机机体前后两端安装两根碳纤维管,将电机安装板固定在碳纤管上,电机安装在固定板上面,电调安装在安装板下方,实现对无人机的驱动。其中,无人机驱动的轴距采用280轴距,固定翼推进装置安装在尾杆上,机身前端安装有摄像头,机翼下方安装有设备挂载架。由于机翼位置为整个飞机重心所在处,所以在此处安装设备挂载架,不会对飞机飞行姿态产生影响,电机选择为朗宇x3525型号的无刷电机最大KV值为880,单个电机拉力为2kg-2.5kg,螺旋桨采用8寸多轴碳纤维正反桨型号为8045,中心孔为5.0mm加3.0和4.0可变变径环,匹配马达为850KV-1300KV,电调采用好盈60A电调,内置可编程BEC,输出电压为5V-8V,飞控主板为赫星orange cube 升级版PIXHAWK2开源飞控自驾仪,其内置有IMU加热系统。优选飞控采用Pixhawk2.4.8,主处理器采用,STM32F427 CotexM4芯与FPU,168MHz/256KBRAM/2MB闪存,协处理器为STM32F103故障协处理器,传感器采用ST Micro L3GD20 3轴16位陀螺仪,ST Micro LSM303D 3轴14位加速度计/磁力计,Invensense公司MPU60003轴加速度计/陀螺仪,5个UART(串行端口),一个高功率,2个硬件流量控制2*CAN,支持Spektrum DSM/DSM2/DSM-X Satellite与DX8兼容输入,拥有14个PWM/舵机输出,提供自动和手动模式,提供冗余电源输入和故障转移功能,集成备份电源和失效备份控制器,主控制器失效时可切换到备份控制器,支持光流传感器,可实现低空定高、定点,支持超声波传感器,可实现超低空不掉高。MicroSD记录飞行数据,(轨迹,传感器,位置,高度,电源,等等数据),可以安装双GPS,实现超高。精度卫星定位,也可支持RTK差分定位,可进行一键返航、自动巡航、航点自动飞行、定点悬停、定高、自动降落、跟随、自稳、自动绕圈等各种飞行模式,可刷PIXyaunsheng原版本固件(PX4)以及ardupilot(APM)固件,支持垂直起降。遥控器选用华科尔D10,采用2.4GHz直接序列扩频技术,自动对频,可以加装增程距离达15公里,图传采用TS832,发射频率5.8G,发射功率600mv,尺寸大小为54*32*10,发射净重为22g。电池采用大容量12S锂电池进行供电。
使用时可在机翼下方挂载架快拆口挂载相应设备。起飞时使用四轴,即垂直起降模式进行垂直起降,垂直起降模式下,垂直起降系统2中的电机运转,由螺旋桨驱动轴传动,带动分别设置在无人机机身左右两侧的螺旋桨水平旋转,螺旋桨水平旋转向下推出气流带动无人机起飞或降落。
升空后切换到固定翼模式进行飞行。固定翼模式下,固定翼推进装置12倾斜向前并向下输出驱动力,无人机左右两侧的机翼以及后方的尾翼在无人机的上方和下方行程压差,产生气流冲击效应,为无人机提供升力,固定翼推进装置12中前高后低倾斜设置的螺旋桨倾斜旋转驱动无人机向前飞行。飞行过程中,摄像头所拍摄画面可以通过图传系统实时传回地地面,可在飞控中进行航线预设,让飞机在固定航线进行空中巡航监视,当空中电池电量低于返回电量时飞机进行自动返航,如果遇到空中电量不足,由于翼展面积较大,可以进行无动力滑翔。
本发明的无人机可在机身底部装两个LED灯泡,用于在空中提供空中照明。考虑到电池续航问题,空中照明还可以从地面挂载供电线进行空中悬停此过程可通过GPS进行空中定位。
本发明的无人机搭载摄像头,可进行空中巡逻,实时提供巡逻画面。无人机起飞、降落以及飞行的过程中,还控制定位单元接收卫星信号,根据卫星信号进行RTK差分定位,标记图传设备所采集的图像对应的位置。其机翼下方快拆架还可以安装各种设备,如救援使用的抛投器,灭火弹等设备。
为使得本发明的无人机能够在飞行过程中进行目标识别和自动飞行控制,在较为优选的实现方式下,飞控主板内还可设置目标识别系统以及自动飞行系统。
其中的目标识别系统设置在加装有Coral USB加速棒的Raspberry pi 4上,参照图5所示,用于执行以下步骤:
步骤D1,利用多分支深度可分离卷积神经网络和Single Shot MultiBox Detector建立目标检测模型;
步骤D2,利用所述目标检测模型,首先对摄像头所采集的航空影像进行3x3卷积,然后对3x3卷积所输出的卷积结果进行深度可分离卷积,再将深度可分离卷积所获得的数据输入过滤器,随后将过滤器过滤所输出的数据分别顺序进行参数不同的两次深度可分离卷积后输出至全局平均池化层,将全局平均池化层所获得的池化数据输出至全连接层;
步骤D3,根据全连接层所输出的信息标识摄像头所采集的航空影像中的目标。
该目标识别系统所采用的视觉识别技术在Raspberry pi 4上利用深度学习技术实现对视频流的目标检测,针对多数深度学习模型存在模型尺寸大,预测速度慢的问题,利用多分支深度可分离卷积神经网络和Single Shot MultiBox Detector(MBDSCNN-SSD)建立目标检测模型。使用深度可分离卷积降低模型的大小,利用多分支结构提高模型的泛化性。在Raspberry pi 4上加装Coral USB加速棒的情况下,MBDSCNN-SSD对物体的检测速度可以达到35fps。图5为MBDSCNN的结构图。通过与深度学习结合,可以利用无人机采集的高分辨率航空影像,可与维护、土地开发、疾病控制、缺陷定位、监测等应用相关联由于无人机采集。由于采用四轴垂直起降与固定翼相结合,可以大大扩大作业面积。
而所述的自动飞行系统被设置以执行以下步骤:
步骤F1,参考图6所示的方式,根据垂直起降系统所对应的坐标系,设定固定翼系统所对应的坐标系为具有与垂直起降系统所对应的坐标系相同的机头方向;
步骤F2,在无人机起飞和/或降落的过程中,驱动螺旋桨旋转带动无人机起飞或降落;在无人机飞行至目标高度的过程中,根据垂直起降系统所对应的坐标系调整无人机飞行至航路所对应的经纬度和高度;
步骤F3,当无人机到达航路所对应的经纬度和高度时,切换至固定翼模式,控制固定翼推进装置12输出驱动力驱动无人机沿该航路所对应的经纬度和高度飞行,同时,实时参考图7所示,实时检测无人机坐标,并在显示屏上显示无人机的飞行轨迹。
上述的自动飞行系统能够兼顾四轴无人机与固定翼飞机预设坐标方式的不同,使得本发明的无人机能够使用同一块控制板实现飞控控制。本发明进通过改变固定翼预设坐标就可将两种飞行模式实现统一,由此使固定翼机头方向与四轴无人机机头方向一致,从而可以随时切换控制。
本发明通过飞控地面站可以实现无人机的自主飞行:首先预设起飞命令,无人机以四轴模式爬升到目标高度,如果开始执行操作之前飞机已经处于飞行状态,飞行器将会直接爬升预定高度。同时此无人机可以设定直线航路点和曲线航路点,无人机将会沿着预设经纬度和高度进行飞行,当进行自主规划航线时无人机自动切换固定翼模式,同时飞行轨迹与预设路线可以在地面站进行观测,此功能可以进行测绘巡查目标识别等任务,减少手动操作难度。
以上仅为本发明的实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些均属于本发明的保护范围。
一种可垂直起降的无人机的控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0