






专利摘要
本实用新型属于水下机器人领域,公开了一种用于水下观测打捞救援的机器人装置,包括:左外板,右外板,上腹板,下腹板,左推进器模块,右推进器模块,控制仓,控制仓支座,机械手,机械手支座,水上控制器,拖缆,左浮力材,右浮力材,声呐,光照传感器和图像传输装置;左外板分别与上腹板、下腹板连接,右外板分别与上腹板、下腹板连接;左推进器模块固定在左外板内侧,右推进器模块固定在右外板内侧;控制仓通过控制仓支座固定在下腹板内侧,机械手通过机械手支座固定在下腹板内侧。本实用新型下潜深度大,适应性强,抗干扰能力强,能适应复杂多样的海底环境;功能多样,集水下观测、救援、打捞于一体,可广泛应用于军事、民用领域。
权利要求
1.一种用于水下观测打捞救援的机器人装置,其特征在于:包括:左外板(25),右外板(15),上腹板(11),下腹板(18),左推进器模块,右推进器模块,控制仓(17),控制仓支座(19),机械手(21),机械手支座(22),水上控制器(1),拖缆(2),左浮力材(6),右浮力材(9),声呐(8),光照传感器(10)和图像传输装置(23);
左外板(25)分别与上腹板(11)、下腹板(18)连接,右外板(15)分别与上腹板(11)、下腹板(18)连接;左推进器模块固定在左外板(25)内侧,右推进器模块固定在右外板(15)内侧;控制仓(17)通过控制仓支座(19)固定在下腹板(18)内侧,机械手(21)通过机械手支座(22)固定在下腹板(18)内侧,拖缆(2)连接水上控制器(1)与控制仓(17),左浮力材(6)和右浮力材(9)固定在上腹板(11)外侧,声呐(8)固定在上腹板(11)外侧,光照传感器(10)固定在上腹板(11)内侧,图像传输装置(23)固定在下腹板(18)内侧。
2.根据权利要求1所述的一种用于水下观测打捞救援的机器人装置,其特征在于:所述的左推进器模块包括:左水平推进器固定支架(3),左斜推进器固定支架(4),左斜推进器(5)和左水平推进器(24);左斜推进器(5)通过左斜推进器固定支架(4)固定在左外板(25)内侧,左水平推进器(24)通过左水平推进器固定支架(3)固定在左外板(25)内侧。
3.根据权利要求2所述的一种用于水下观测打捞救援的机器人装置,其特征在于:所述的右推进器模块包括:右水平推进器固定支架(14),右斜推进器固定支架(13),右斜推进器(12)和右水平推进器(16);右斜推进器(12)通过右斜推进器固定支架(13)固定在右外板(15)内侧,右水平推进器(16)通过右水平推进器固定支架(14)固定在右外板(15)内侧。
4.根据权利要求3所述的一种用于水下观测打捞救援的机器人装置,其特征在于:所述的控制仓(17)包括:后密封法兰(26),螺栓(27),筒壁(28),亚克力观察窗(34),O形密封圈(32),压盖(33),密封平垫片(35),前密封法兰(36),电源(29),集成电路板(30)和图像传感器(31);
后密封法兰(26)通过螺栓(27)固定在筒壁(28)一端的开口上,亚克力观察窗(34)通过O形密封圈(32)、压盖(33)、密封平垫片(35)和前密封法兰(36)连接在筒壁(28)另一端的开口上;电源(29),集成电路板(30)和图像传感器(31)位于筒壁(28)内,电源(29)与集成电路板(30)连接,图像传感器(31)与集成电路板(30)连接。
5.根据权利要求1、2、3或4任意所述的一种用于水下观测打捞救援的机器人装置,其特征在于:所述的下腹板(18)外侧固定有下腹板加强条(20)。
6.根据权利要求1、2、3或4任意所述的一种用于水下观测打捞救援的机器人装置,其特征在于:所述的上腹板(11)外侧固定有吊装把手(7)。
7.根据权利要求5所述的一种用于水下观测打捞救援的机器人装置,其特征在于:所述的上腹板(11)外侧固定有吊装把手(7)。
说明书
技术领域
本实用新型属于水下机器人领域,尤其涉及一种用于水下观测打捞救援的机器人装置。
背景技术
随着工业技术的发展,人类的活动已经不仅限于陆地上。为了获取更多的资源和更广阔的空间,水下世界成为一种可靠的选择。而水下环境一般比较复杂,如暗流、温差、压力、礁石、生物、清晰度、空间等因素会限制潜水员一系列的活动。随着工业技术的发展,功能强大的水下机器人得以进一步的发展,可以替代潜水员进入危险的水域进行长时间的工作。
现有的水下观测、打捞、救援等均是由专业潜水员完成,在实际操作中大都水况不明、环境复杂、压力、时间、温差等对潜水员的水下作业旺旺带来未知的生命安全威胁。因此,针对上述问题,本实用新型提供一种用于水下观测、打捞、救援的水下机器人装置,利用机器人技术设计的ROV可替代潜水员进行水下作业,提高工作效率和保障潜水员的生命安全。
ROV,即遥控无人潜水器Remote Operated Vehicle,无人水下航行器UnmannedUnderwater Vehicle的一种,系统组成一般包括:动力推进器、遥控电子通讯装置、黑白或彩色摄像头、摄像俯仰云台、用户外围传感器接口、实时在线显示单元、导航定位装置、自动舵手导航单元、辅助照明灯和凯夫拉零浮力拖缆等单元部件。功能多种多样,不同类型的ROV用于执行不同的任务,被广泛应用于军队、海岸警卫、海事、海关、核电、水电、海洋石油、渔业、海上救助、管线探测和海洋科学研究等各个领域。
目前国内用于水下观测、救援、打捞的ROV装置下潜深度大都在水下0-50米范围内,大都结构简单,运行姿态单一,不能实现高精度的障碍躲避,在面对复杂地形时工作能力受到极大限制,尤其是在水流湍急处更是无法提供稳定的定位能力,操作性及其有限,往往限制了水下ROV的发展状况。纵观国内水下ROV领域,能够实现在水下0-1500米范围内压力工作的高精度ROV装置更是没有,现有的ROV不管是结构功能都非常差,不能满足和适应各种状况下的水下工作,无论是下潜深度、姿态控制都有很多缺点,更是无法有效的实现对复杂环境下水下的观测、救援、打捞、勘探等工作。
申请号为CN201710691377.X的专利公开了水下打捞机器人,复合光缆连接安装在水下机器人上的复合光缆线头及上位机,下位机设置在水下机器人体内;所述水下机器人包括机械爪、机械臂、储物篮、履带底盘、上浮气囊及高压气瓶、紧急浮标、复合光缆线头、旋转平台和摄像头防水罩;所述机械臂连接旋转平台及机械爪;所述上浮气囊及高压气瓶安装在旋转平台底端;所述紧急浮标和复合光缆线头均安装在支撑旋平台的底座上;该水下打捞机器人,具备水下打捞、水下监察多种功能,运动灵活,实用性强和机动性强,适用范围广;本实用新型转向时载体可原地回转,亦可利用旋转平台旋转,受水流影响小,对水下环境影响小,适应在狭窄的水域里作业。但该装置机动性能不强,只适合短距离、较浅水域使用,抗水流干扰能力差。
发明内容
本实用新型的目的在于公开适应性强、功能多样的一种用于水下观测打捞救援的机器人装置。
本实用新型的目的是这样实现的:
一种用于水下观测打捞救援的机器人装置,包括:左外板25,右外板15,上腹板11,下腹板18,左推进器模块,右推进器模块,控制仓17,控制仓支座19,机械手21,机械手支座22,水上控制器1,拖缆2,左浮力材6,右浮力材9,声呐8,光照传感器10和图像传输装置23;
左外板25分别与上腹板11、下腹板18连接,右外板15分别与上腹板11、下腹板18连接;左推进器模块固定在左外板25内侧,右推进器模块固定在右外板15内侧;控制仓17通过控制仓支座19固定在下腹板18内侧,机械手21通过机械手支座22固定在下腹板18内侧,拖缆2连接水上控制器1与控制仓17,左浮力材6和右浮力材9固定在上腹板11外侧,声呐8固定在上腹板11外侧,光照传感器10固定在上腹板11内侧,图像传输装置23固定在下腹板18内侧。
进一步的,左推进器模块包括:左水平推进器固定支架3,左斜推进器固定支架4,左斜推进器5和左水平推进器24;左斜推进器5通过左斜推进器固定支架4固定在左外板25内侧,左水平推进器24通过左水平推进器固定支架3固定在左外板25内侧。
进一步的,右推进器模块包括:右水平推进器固定支架14,右斜推进器固定支架13,右斜推进器12和右水平推进器16;右斜推进器12通过右斜推进器固定支架13固定在右外板15内侧,右水平推进器16通过右水平推进器固定支架14固定在右外板15内侧。
进一步的,控制仓17包括:后密封法兰26,螺栓27,筒壁28,亚克力观察窗34,O形密封圈32,压盖33,密封平垫片35,前密封法兰36,电源29,集成电路板30和图像传感器31;
后密封法兰26通过螺栓27固定在筒壁28一端的开口上,亚克力观察窗34通过O形密封圈32、压盖33、密封平垫片35和前密封法兰36连接在筒壁28另一端的开口上;电源29,集成电路板30和图像传感器31位于筒壁28内,电源29与集成电路板30连接,图像传感器31与集成电路板30连接。
进一步的,下腹板18外侧固定有下腹板加强条20。
进一步的,上腹板11外侧固定有吊装把手7。
本实用新型的有益效果为:本实用新型下潜深度大,适应性强,抗干扰能力强,能适应复杂多样的海底环境;功能多样,集水下观测、救援、打捞于一体,可广泛应用于军事、民用领域。
目前国内用于水下观测、救援、打捞的ROV装置下潜深度大都在水下0-50米范围内,大都结构简单,运行姿态单一,不能实现高精度的障碍躲避,在面对复杂地形时工作能力受到极大限制,尤其是在水流湍急处更是无法提供稳定的定位能力,操作性及其有限,往往限制了水下ROV的发展状况。纵观国内水下ROV领域,能够实现在水下0-1500米范围内压力工作的高精度ROV装置更是没有,现有的ROV不管是结构功能都非常的鸡肋,不能满足和适应各种状况下的水下工作,无论是下潜深度、姿态控制都有很多缺点,更是无法有效的实现对复杂环境下水下的观测、救援、打捞、勘探等工作。本实用新型通过水下ROV的技术将装置分为水上装置部分和水下装置部分,两部分通过拖揽连接用于信号传输和电力供应。其中水上部分主要是控制器,水下装置主要是潜水器框架、控制仓、灯光、声呐、推进器和机械手等部分组成。本装置可在水下0-1500m压力范围内正常工作,在水下可以为实现各种复杂动作,在复杂水下环境高效的实现动力补偿和定位补偿,是目前国内任何水下ROV都不具有的功能。本实用新型的工作原理是装置在顶部设置有浮力材,电源切断时装置漂浮在水面上。通电后装置内置程序对整个装置进行硬件检查和运行环境进行检查,如果异常则需要迅速的对装置进行回收,尤其是控制舱的湿度参数异常。当检测结果一切正常时,根据工作需要启动斜推进器进行装置下潜,根据声纳、压力传感器、摄像头等数值确定和保持巡航深度并及时传输水下图像至水面上。根据工作需要启动水平推进器,此时装置可实现在水中可控航行。水平推进器一只正转,一只反转时可实现装置的原地转动和前进方向变换。装置在水下如需要姿态倾斜或转动时需斜推进器一只正转一只反转可以实现装置的姿态改变。装置在整个工作过程中需要对各个电器元件的工作状态和运行环境进行实时检测和反馈。装置在水下巡航时发现目标时,迅速根据摄像头传输的图像迅速的确定运动路径和运行姿态达到指定位置进行工作,如此时受到湍流、波浪等因素影响造成位置瞬间改变,装置会及时通过调节推进器转速进行位置补偿,保证手臂操作稳态。装置完成指令后可根据下潜深度和工作环境确定返航路线和各个水层停留时间。避免因压力的急剧变化对装置和目标物的破坏。本装置将多种水下作业方式集于一身,是目前国内任何水下ROV都不具有的工作能力。可在矿洞、急流、沉船、管道、珊瑚群、钻井平台、潜艇、珊瑚群、养殖平台等环境进行观测、救援、打捞等水下工作。可替代潜水员和其他ROV进入更加组杂的水下世界进行更加复杂的工作,为人类向海洋进军提供科技保障。
附图说明
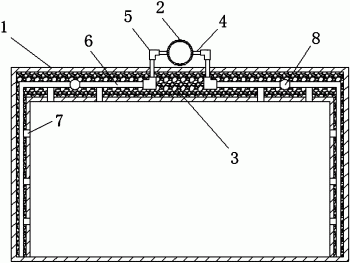
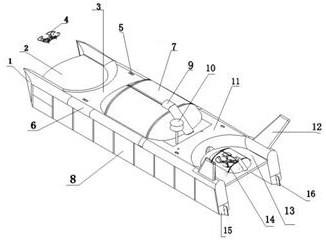
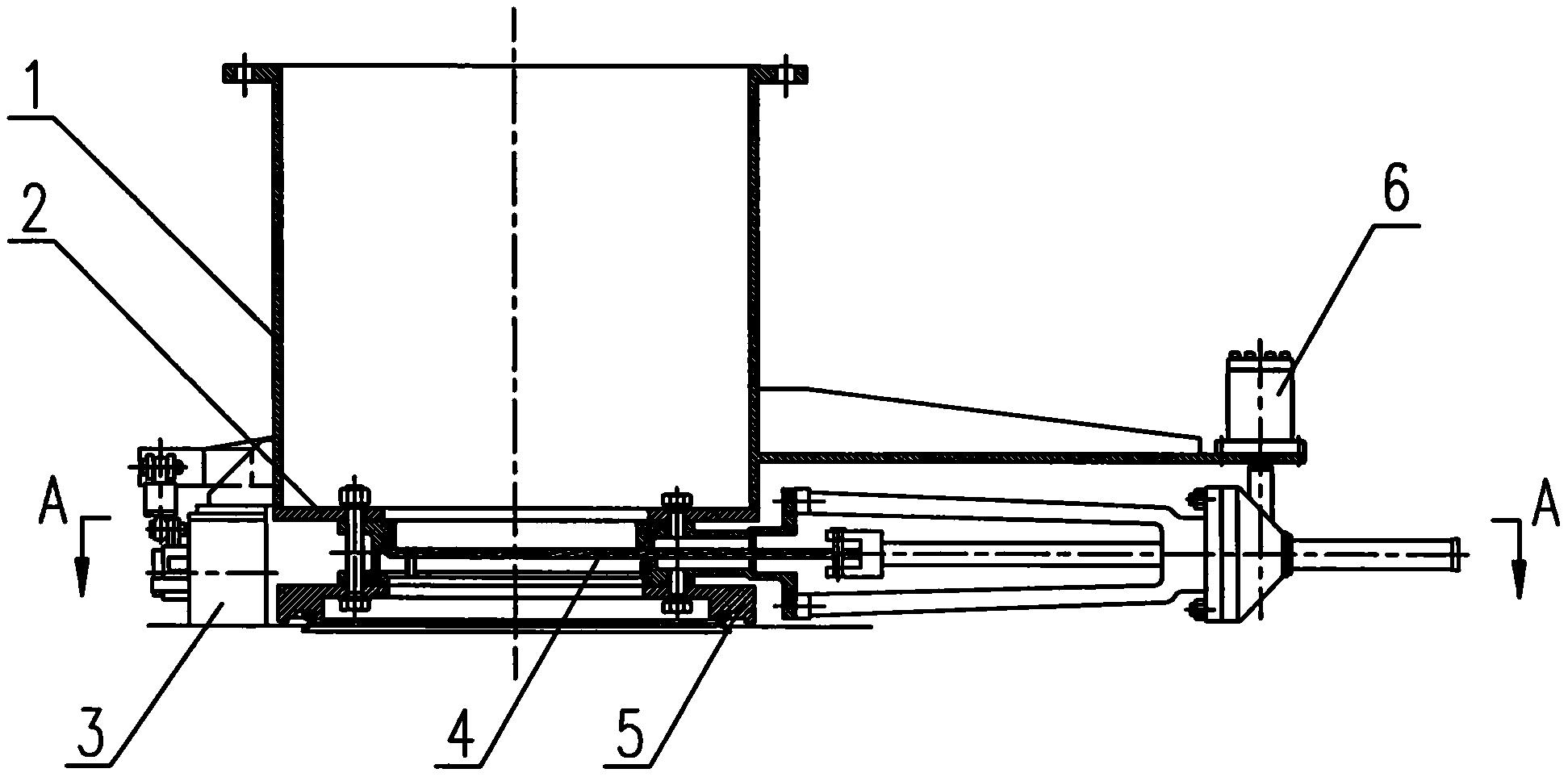
图1是一种用于水下观测打捞救援的机器人装置示意图;
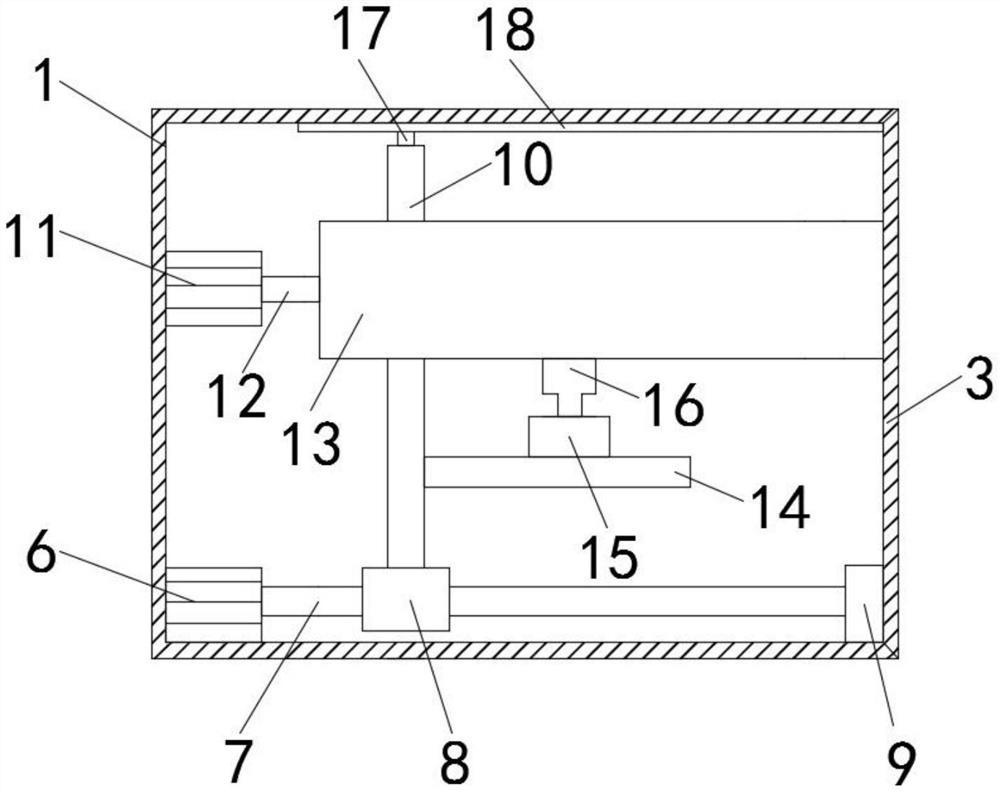
图2是控制仓示意图;
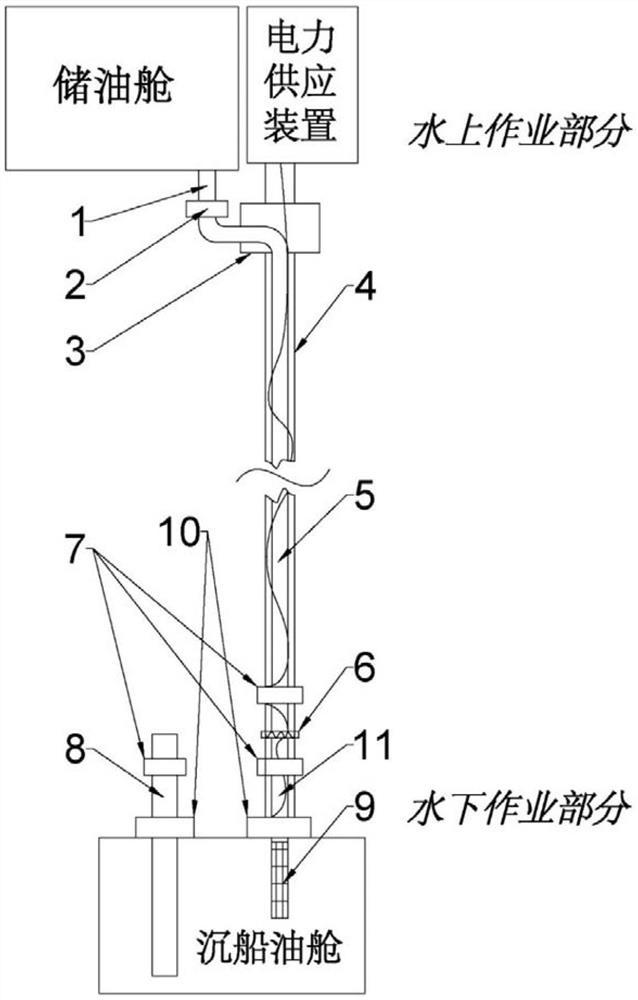
图3是控制方法图。
图中:1、水上控制器,2、拖缆,3、左水平推进器固定支架,4、左斜推进器规定支架,5、左斜推进器,6、左浮力材,7、吊装把手,8、声呐,9、右浮力材,10、光照传感器,11、上腹板,12、右斜推进器,13、右斜推进器固定支架,14、右水平推进器固定支架,15、右外板,16、右水平推进器,17、控制仓,18、下腹板,19、控制仓支座,20、下腹板加强条,21、机械手,22、机械手支座,23、图像传输装置,24、左水平推进器,25、左外板,后密封法兰,27、螺栓,28、筒壁,29、电源,30、集成电路板,31、图像传感器,32、O形密封圈,33、压盖,34、亚克力观察窗,35、密封平垫片,36、前密封法兰。
具体实施方式
下面结合附图来进一步描述本实用新型:
如图1,一种用于水下观测打捞救援的机器人装置,潜水器本身是一个具体特定比重的浮力框架,具有良好的抗冲击和抗腐蚀能力,搭载各种传感器的基础平台,通过脐带与控制单元连接。潜水器的推力由数套推进器提供,这些推进器可以使ROV在水中完成各种精准的运动。每一个ROV都有至少一个耐压仓,仓中一般密封有各种控制元件,电源分配电路等,所有的外部指令以都需要经过电子仓的处理来完成指定的工作。所述用于水下观测、打捞、救援的机器人装置包括左外板25,右外板15,上腹板11,下腹板18,左推进器模块,右推进器模块,控制仓17,控制仓支座19,机械手21,机械手支座22,水上控制器1,拖缆2,左浮力材6,右浮力材9,声呐8,光照传感器10和图像传输装置23;控制仓17包括:后密封法兰26,螺栓27,筒壁28,亚克力观察窗34,O形密封圈32,压盖33,密封平垫片35,前密封法兰36,电源29,集成电路板30和图像传感器31。
如图2,后密封法兰26通过螺栓27固定在筒壁28一端的开口上,亚克力观察窗34通过O形密封圈32、压盖33、密封平垫片35和前密封法兰36连接在筒壁28另一端的开口上;电源29,集成电路板30和图像传感器31位于筒壁28内,电源29与集成电路板30连接,图像传感器31与集成电路板30连接。
所述ROV呈方形,由腹板和外板构成浮力框架。浮力框架上层设置有左浮力材、右浮力材、吊装把手、声呐;所述浮力框架中层设置有多组推进器、推进器支架、控制仓支架、控制仓、光照传感器、图像传感器、机械手、机械手固定支架;框架底层设置底腹板加强条。
本实用新型的潜水器设置有左、右腹板与上腹板、下腹板分别连接,在上腹板上设置有左、右两块浮力材使其构成特定比浮力框架。上腹板上侧设置有声呐。上腹板上册设置有吊装把手。所述浮力框架中部设置有控制仓通过控制舱支座与下腹板连接。浮力框架中部设置1-3只左推进器并通过左水平推进器固定支架固定在左外板上。浮力框架中部设置1-3只右推进器并通过右水平推进器支架固定在右外板上。浮力框架中部设置1-3只左斜推进器并通过左斜推进器固定支架固定在左外板上。浮力框架中部设置1-3只右斜推进器并通过右斜推进器固定支架固定在右外板上。下腹板上侧设置图像传感器。浮力框架中部设置有机械手并通过机械手固定支架与下腹板连接。浮力框架中部设置有光照传感器并与上腹板相连接。下腹板底部设置有下腹板加强条。
本实用新型通过水下ROV的技术将装置分为水上装置部分和水下装置部分,两部分通过拖揽连接用于信号传输和电力供应。其中水上部分主要是控制器,水下装置主要是潜水器框架、控制仓、灯光、声呐、推进器和机械手等部分组成。
本装置可在水下0-1500m压力范围内正常工作,在水下可以为实现各种复杂动作,在复杂水下环境高效的实现动力补偿和定位补偿,是目前国内任何水下ROV都不具有的功能。本实用新型的工作原理是装置在顶部设置有浮力材,电源切断时装置漂浮在水面上。通电后装置内置程序对整个装置进行硬件检查和运行环境进行检查,如果异常则需要迅速的对装置进行回收,尤其是控制舱的湿度参数异常。当检测结果一切正常时,根据工作需要启动斜推进器进行装置下潜,根据声纳、压力传感器、摄像头等数值确定和保持巡航深度并及时传输水下图像至水面上。根据工作需要启动水平推进器,此时装置可实现在水中可控航行。水平推进器一只正转,一只反转时可实现装置的原地转动和前进方向变换。装置在水下如需要姿态倾斜或转动时需斜推进器一只正转一只反转可以实现装置的姿态改变。装置在整个工作过程中需要对各个电器元件的工作状态和运行环境进行实时检测和反馈。装置在水下巡航时发现目标时,迅速根据摄像头传输的图像迅速的确定运动路径和运行姿态达到指定位置进行工作,如此时受到湍流、波浪等因素影响造成位置瞬间改变,装置会及时通过调节推进器转速进行位置补偿,保证手臂操作稳态。装置完成指令后可根据下潜深度和工作环境确定返航路线和各个水层停留时间。避免因压力的急剧变化对装置和目标物的破坏。本装置将多种水下作业方式集于一身,是目前国内任何水下ROV都不具有的工作能力。可在矿洞、急流、沉船、管道、珊瑚群、钻井平台、潜艇、珊瑚群、养殖平台等环境进行观测、救援、打捞等水下工作。可替代潜水员和其他ROV进入更加组杂的水下世界进行更加复杂的工作,为人类向海洋进军提供科技保障。利用水下机器人技术来提高工作效率,减少人力成本和提高潜水员生命安全。
如图3,控制方法为:初始运行,进行运行环境检测,环境检测包括:斜推进器检测,水平推进器检测,控制仓湿度、温度检测,机械手臂检测,声纳检测,灯光检测,视频设备检测,若环境检测不合格,则进行人工排除故障,若环境检测合格,则进行地上人员监控、斜推进器提供推力下潜、全部传感器开启;其中全部传感器开启在回收前一直运行;之后到达预订深度保持推力不变,然后水平推进器启动使装置前进/后退,途中可进行障碍躲避,即控制水平推进器一只正转一只反转、斜推进器一只正转一只反转,通过灯光和摄像头障碍躲避成功寻找目标物,然后调整斜推进器推力和水平推进器推力靠近目标物,然后控制机械手进行抓取,再控制推进器返航;当遇到急流,利用声纳进行位置补偿,将位置补偿信息用于靠近目标物过程中的推进器调整以及控制机械手进行抓取的过程,当声纳判断超过预定深度报警。
实施例1:
所述用于观测、打捞、救援的自动化机器人装置包括水上控制器、拖缆、左水平推进器固定支架、左斜推进器固定支架、左斜推进器、左浮力材、吊装把手、声呐、右浮力材、光照传感器、上腹板、右斜推进器、右斜推进器固定支架、右水平推进器固定支架、右外板、右水平推进器、控制仓、下腹板、控制仓固定支架、下腹板加强条、机械手、机械手固定支架、图像传输装置、左水平推进器、左外板;所述ROV呈方形,由腹板和外板构成浮力框架。浮力框架上层设置有左浮力材、右浮力材、吊装把手、声呐;所述浮力框架中层设置有多组推进器、推进器支架、控制仓支架、控制仓、照明传感器、图像传感器、机械手、机械手固定支架;浮力框架底层设置底腹板加强条。所述装置设置有左、右腹板与上腹板、下腹板分别连接,在上腹板上设置有左、右两块浮力材使其构成特定比浮力框架。所述装置设置有左、右腹板与上腹板、下腹板分别连接,在上腹板上设置有左、右两块浮力材使其构成特定比浮力框架。所述潜水器设置有左、右腹板与上腹板、下腹板分别连接,在上腹板上设置有左、右两块浮力材使其构成特定比浮力框架。所述上腹板上侧设置有声呐。所述上腹板上册设置有吊装把手。所述浮力框架中部设置有控制仓通过控制舱支座与下腹板连接。所述浮力框架中部设置1只左推进器并通过左水平推进器固定支架固定在左外板上。所述浮力框架中部设置1只右推进器并通过右水平推进器支架固定在右外板上。所述浮力框架中部设置1只左斜推进器并通过左斜推进器固定支架固定在左外板上。所述浮力框架中部设置1只右斜推进器并通过右斜推进器固定支架固定在右外板上。所述底腹板上侧设置图像传感器。所述浮力框架中部设置有机械手并通过机械手固定支架与下腹板连接。所述浮力框架中部设置有光照传感器并与上腹板相连接。所述下腹板底部设置有下腹板加强条。
综上,本实用新型提供一种用于水下观测、打捞、救援的机器人装置,所述用于水下观测、打捞、救援的机器人(ROV)装置包括水上控制器、拖缆、左水平推进器固定支架、左斜推进器固定支架、左斜推进器、左浮力材、吊装把手、声呐、右浮力材、光照传感器、上腹板、右斜推进器、右斜推进器固定支架、右水平推进器固定支架、右外板、右水平推进器、控制仓、下腹板、控制仓支座、下腹板加强条、机械手、机械手固定支架、图像传感器、左水平推进器、左外板;利用水下机器人技术来提高工作效率,减少人力成本和提高潜水员生命安全。
一种用于水下观测打捞救援的机器人装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0