

IPC分类号 : B25J18/00,B25J13/08,B25J11/00,B63B27/00,B63B39/00






专利摘要
本实用新型涉及一种波浪补偿打捞机器人系统,该波浪补偿打捞机器人系统安装在船舶上;其特征在于:包括机械臂机构、惯导传感器、运动控制器、计算机和视觉检测器;本实用新型装置中的机器人与普通机器人相比较,通过横向导轨和纵向导轨有了更大的工作空间,方便移动,便于存放在船舱和防腐蚀的壳体中;这样,增加了其使用寿命,更加便于维护;本实用新型装置中采用的是串联形式的机构,与传统并联的波浪补偿平台相比较更加容易得到位置正解,精度更高;本实用新型装置和控制方法可以有效的替代功能单一的传统波浪补偿装置,使整个补偿系统的结构更加简单、操作更加便捷,工作效率更高;在船舶行进过程中,也可以在甲板上作业进行工件打捞。
权利要求
1.一种波浪补偿打捞机器人系统,该波浪补偿打捞机器人系统安装在船舶上;其特征在于:包括机械臂机构、惯导传感器、运动控制器、计算机和视觉检测器;
所述机械臂机构包括基座、纵向导轨、横向导轨和机械臂;所述纵向导轨与横向导轨互相垂直且设置在同一水平面上,所述基座通过运动控制器可沿着互相垂直的横向导轨与纵向导轨往复移动;所述机械臂通过螺栓组固定连接在基座上,机械臂跟随基座沿着横向导轨或纵向导轨移动;所述机械臂由伺服电机驱动;
所述惯导传感器位于机械臂的旁侧且连接固定在基座上,实时测量因风浪引起的数据变换并向计算机发送所测试的数据;
所述计算机分别与惯导传感器、运动控制器和视觉检测器进行数据交换;所述计算机处理惯导传感器输出的数据并进行处理以及建立模型、预测和输出数据;所述计算机向运动控制器发送指令;所述计算机处理视觉检测器的传输数据;
所述运动控制器的一端与计算机进行数据交换,运动控制器的另一端与机械臂的伺服电机相连并控制机械臂进行补偿运动;
所述视觉处理器包括第一摄像机和第二摄像机;第一摄像机与第二摄像机分别安装在机械臂机构上。
说明书
技术领域
本实用新型涉及海上船舶打捞领域,尤其涉及一种波浪补偿打捞机器人系统。
背景技术
我国是海洋大国,管辖海域广阔,海洋资源可开发利用的潜力很大,随着加快发展海洋产业,促进海洋经济的发展,海洋平台或船舶越来越频繁地进行着海上的作业,由于风浪的影响,海上作业的船舶在打捞时会产生无规律的摇摆,打捞的难度也随之增大,甚至会导致船舶打捞的中断以及危害工作人员的安全。那么由于海浪引起的船舶的横摇、纵摇和艏摇对打捞的影响,将是一个重点和棘手解决的问题。
目前,海上船舶打捞装置多为人工操作的吊机式缆索打捞装置。现有的打捞装置是将吊机安装在船甲板上,通过人工对缆索升降的操作进行海上的打捞作业,在进行打捞的过程中,由于风浪的影响,船舶将不停的做摇摆运动,工作人员将会不断的对缆索进行升降补偿,抓取目标的准确度和效率就会很低。同时海上的目标物也会不断地发生位置的相对变化,由于人工的观察到操作缆绳具有一定的延迟性,这将会严重影响工件位置精确度和快速有效的打捞工件。
如中国专利201610617770 .X所述的一种波浪补偿专用机器人,具有小臂、手腕机构、末端执行器驱动器和末端执行机构,小臂前端连接手腕机构后端,手腕机构前端刚性连接末端执行器驱动器,末端执行器驱动器连接末端执行机构,初始位置时的手腕机构平行于舰船甲板,手腕机构前端指向船头正前方向,其特征是:手腕机构的后端包含第一、第二驱动器,前端包含一个差动机构和两个支撑臂,中间是支撑架,支撑架与小臂前端固接,支撑架的中间位置固联驱动框架,第一、第二驱动器在驱动框架的左、右两侧相对布置且共同连接驱动框架,第一、第二驱动器的中心轴均左右水平布置;支撑架的前侧方固接一左一右布置的两个支撑臂,两个支撑臂之间是差动机构;差动机构由四个锥齿轮、一个偏转轴和两个俯仰主动轴组成,偏转轴上下垂直布置,第一、第二俯仰主动轴中心线共线、与偏转轴的中心线相垂直且一左一右对称布置在偏转轴的两侧,第一、第二俯仰主动轴的一端共同能转动地连接差动机构支撑块,另一端支撑在同侧对应的支撑臂上,偏转轴的中间段同轴间隙穿过差动机构支撑块的中心孔,偏转轴的上段上通过轴承同轴连接第三锥齿轮,偏转轴的下段上同轴固定连接第一锥齿轮;第一俯仰主动轴上同轴固定套装相互固接在一起的第二锥齿轮和第一带轮,第二俯仰主动轴上同轴固定套装相互固接在一起的第四锥齿轮和第三带轮,第一锥齿轮与第二锥齿轮、第四锥齿轮均相啮合,第三锥齿轮与第二锥齿轮、第四锥齿轮也均相啮合;第一驱动器的输出轴同轴固定连接第四带轮, 第二驱动器的输出轴同轴固定连接第二带轮,第一带轮通过第一齿形皮带连接第二带轮,第三带轮通过第二齿形皮带连接第四带轮;锥齿轮通过连接件固接末端执行器驱动器。
上述专利中采用带轮式的传送结构,导致传动机构复杂,工作空间狭小,维护麻烦且使用寿命低,带轮式的传动精度差;
针对上述打捞问题,本实用新型设计了一种波浪补偿打捞机器人系统。
实用新型内容
本实用新型要解决的技术问题是提供一种波浪补偿打捞机器人系统,该系统具有波浪补偿和自动识别的功能,能够针对风浪引起船舶的横摇、纵摇和艏摇进行实时补偿确保末端执行器不随海上风浪影响而产生严重晃动并且能够自动拍摄判断海上移动物体的准确位置,以完成高效、准确、可靠的完成打捞任务。
为解决上述技术问题,本实用新型的技术方案为:一种波浪补偿打捞机器人系统,该波浪补偿打捞机器人系统安装在船舶上;其创新点在于:包括机械臂机构、惯导传感器、运动控制器、计算机和视觉检测器;
所述机械臂机构包括基座、纵向导轨、横向导轨和机械臂;所述纵向导轨与横向导轨互相垂直且设置在同一水平面上,所述基座通过运动控制器可沿着互相垂直的横向导轨与纵向导轨往复移动;所述机械臂通过螺栓组固定连接在基座上,机械臂跟随基座沿着横向导轨或纵向导轨移动;所述机械臂由伺服电机驱动;
所述惯导传感器位于机械臂的旁侧且连接固定在基座上,实时测量因风浪引起的数据变换并向计算机发送所测试的数据;
所述计算机分别与惯导传感器、运动控制器和视觉检测器进行数据交换;所述计算机处理惯导传感器输出的数据并进行处理以及建立模型、预测和输出数据;所述计算机向运动控制器发送指令;所述计算机处理视觉检测器的传输数据;
所述运动控制器的一端与计算机进行数据交换,运动控制器的另一端与机械臂的伺服电机相连并控制机械臂进行补偿运动;
所述视觉处理器包括第一摄像机和第二摄像机;第一摄像机与第二摄像机分别安装在机械臂机构上。
所述该系统的工作方法为:
S1:首先视觉处理器采集待打捞工件的图像,并将得到的待打捞工件图像根据标定的模板图形进行比对,寻找与所述模板匹配的特征图形,特征图形经计算机提取出反映执行器和工件的位姿偏差信息,根据第一摄像机和第二摄像机的坐标系统与机械臂坐标系统的映射关系进行变换,得到工件在机械臂坐标系统内的坐标,通过图像的特征误差得到机械臂的运动位置增量,并将其传递给机械臂的伺服电机,确定伺服电机的转速和转向,根据带打捞工件坐标计算出机器臂路径轨迹;
S1:根据第一摄像机和第二摄像机采集到的坐标数据,通过驱动电机将惯导传感器和机械臂通过横向导轨和纵向导轨移动到工作位置;
S2:利用惯导传感器实时检测出船舶因风浪引起的变化来检测到船舶的横摇、纵摇和艏摇运动参数,并将这些数据输入到计算机中,并向计算机提供一个预测算法;
S3:惯导传感器输送的数据在计算机中进行滤波预处理和数据归一化处理并建立模型,计算机根据建立的模型和惯导传感器检测到的数据,预测波浪的情况;计算机根据预测的波浪情况确定目标点的在波浪作用下位置坐标,并与实际所明确的目标点坐标进行对比,计算出补偿数据;
S4:计算机将补偿数据传递给运动控制器,运动控制器根据船舶的位移和速度变化率的大小,经运算后给出控制信号,并将其传递给机械臂伺服驱动器,伺服驱动器根据控制信号的大小,决定伺服电机的转速和转向,伺服电机驱动机械臂完成波浪补偿功能;
S5:惯导传感器不断地将检测到的船舶的实际位移、速度等参数反馈给计算机,计算机处理后反馈给运动控制器,运动控制器根据位移和速度的变化率的大小在计算出下一周期控制信号的大小,并将其传递给机械臂伺服驱动器,进行下一周期的控制;
S6:伺服电机根据波浪补偿数据和视觉处理数据,驱动机械臂,待打捞工件的打捞任务。
所述惯导传感器能够实时检测出横摇、纵摇、艏摇、纵荡、横荡、垂荡以及纵荡、横荡和垂荡的速度数据并输送给计算机进行处理。
所述S3中建立模型为通过将惯导传感器输送的数据在零均值和平稳化处理后通过计算机计算出自相关函数acf和偏相关函数pacf,根据函数曲线判定的AR模型,根据判定的AR模型通过计算机识别出模型参数对船舶进行连续预测。
本实用新型的优点在于:
1)本实用新型装置中的机器人与普通机器人相比较,通过横向导轨和纵向导轨有了更大的工作空间,方便移动,便于存放在船舱和防腐蚀的壳体中。这样,增加了其使用寿命,更加便于维护。
2)本实用新型装置中采用的是串联形式的机构,与传统并联的波浪补偿平台相比较更加容易得到位置正解,精度更高。
3)本实用新型装置和控制方法可以有效的替代功能单一的传统波浪补偿装置,使整个补偿系统的结构更加简单、操作更加便捷,工作效率更高。在船舶行进过程中,也可以在甲板上作业进行物品打捞。
附图说明
下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
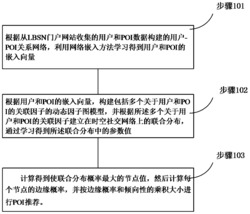
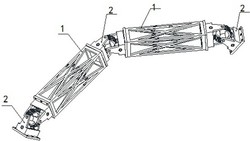
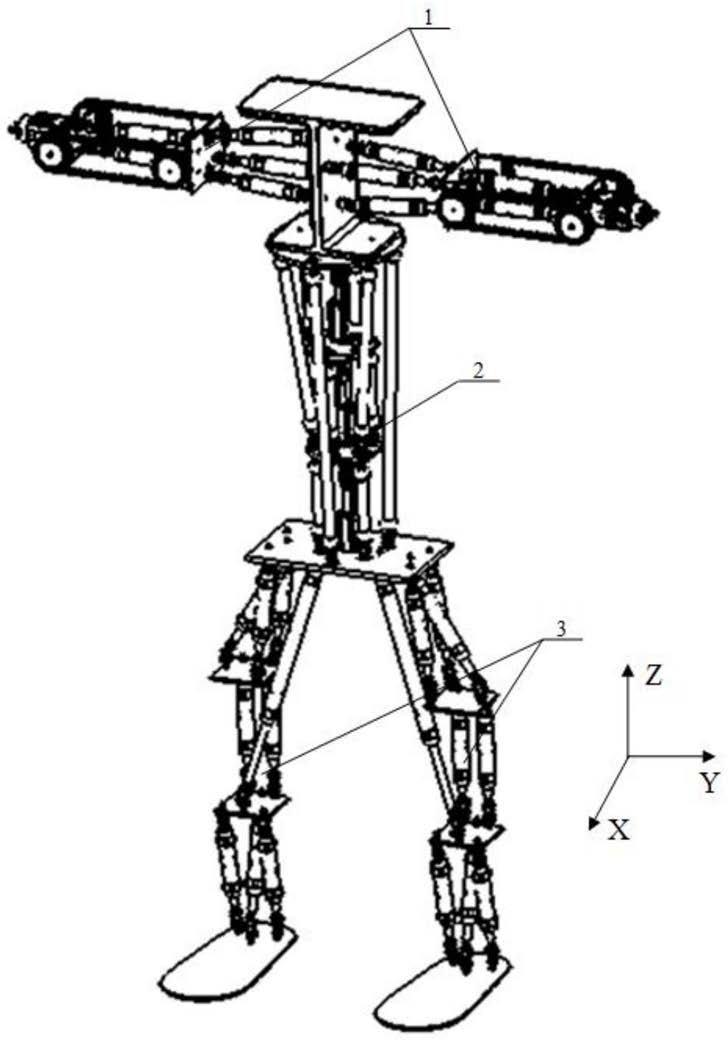
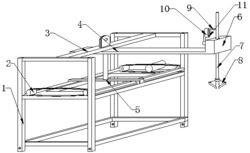
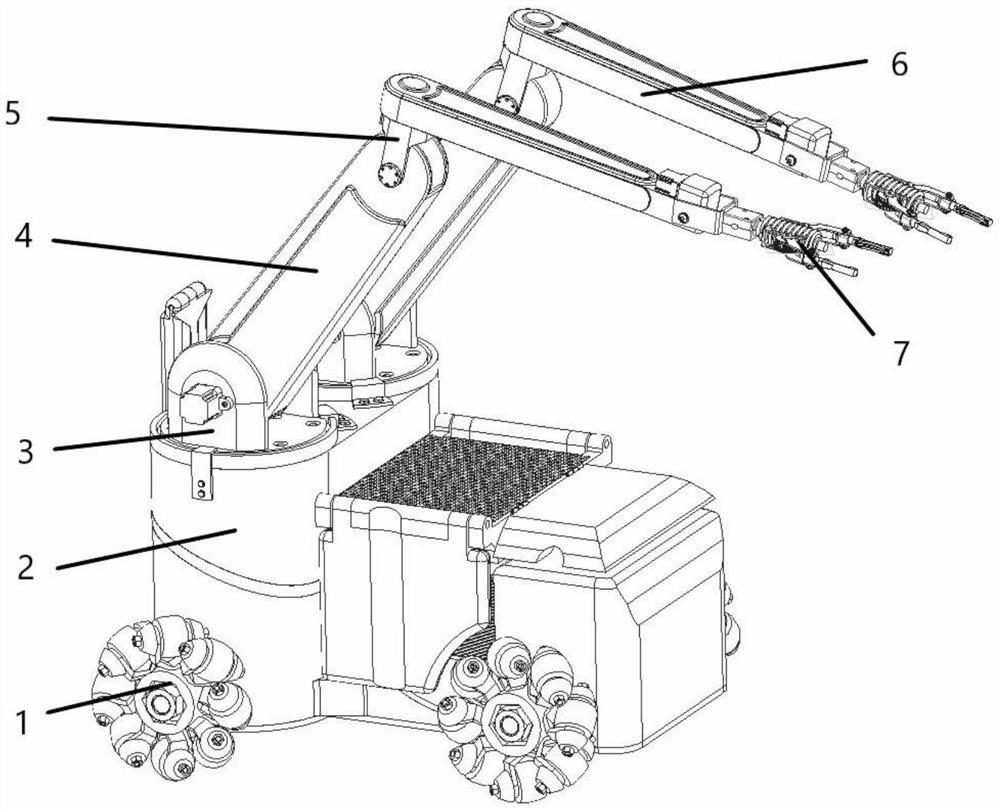
图1为本实用新型的波浪补偿机器人系统的整体结构示意图。
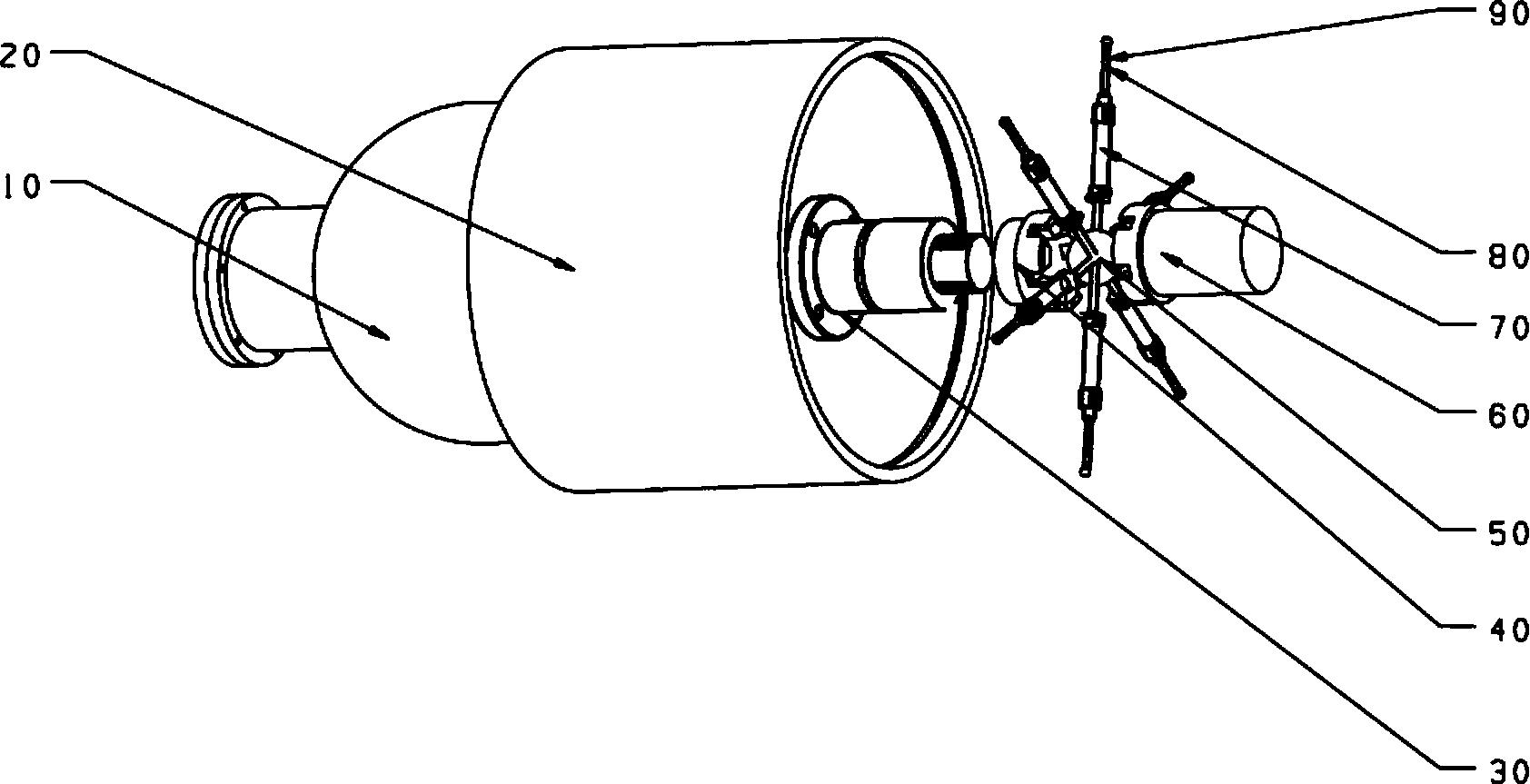
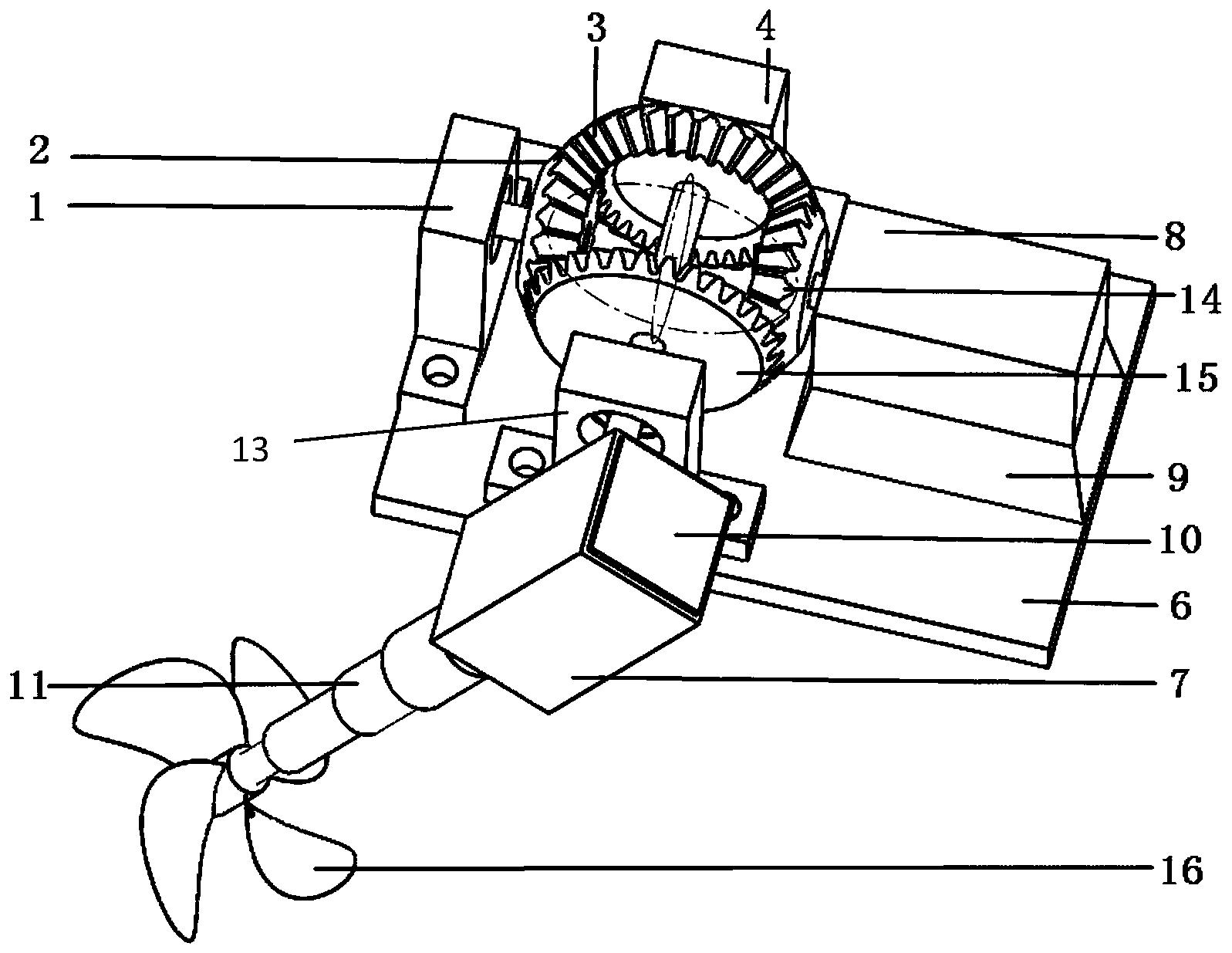
图2为本实用新型的视觉处理器结构图。
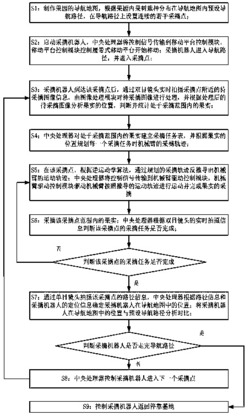
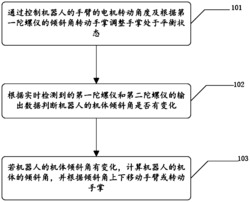
图3为本实用新型的控制系统流程图。
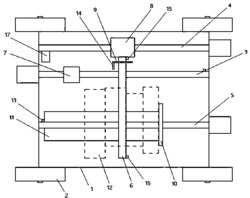
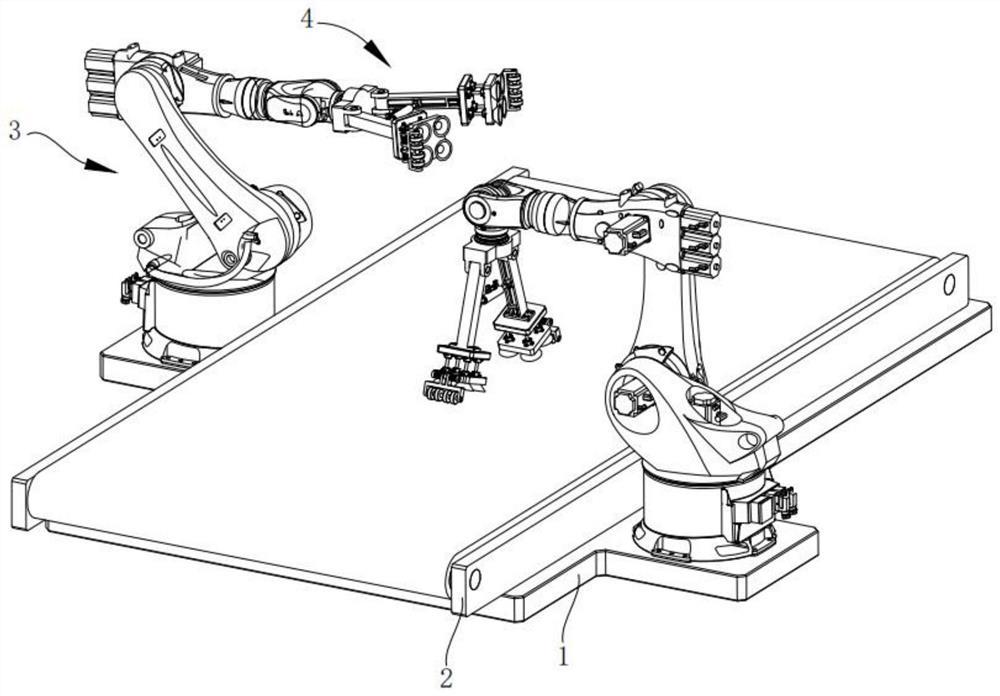
图4为本实用新型的控制结构图。
具体实施方式
下面的实施例可以使本专业的技术人员更全面地理解本实用新型,但并不因此将本实用新型限制在所述的实施例范围之中。
如图1至图4所示的一种波浪补偿打捞机器人系统,该波浪补偿打捞机器人系统安装在船舶上;包括机械臂机构1、惯导传感器2、运动控制器3、计算机和视觉检测器4。
机械臂机构包括基座11、纵向导轨、横向导轨和机械臂12;所述纵向导轨与横向导轨互相垂直且设置在同一水平面上,所述基座11通过运动控制器可沿着互相垂直的横向导轨与纵向导轨往复移动;所述机械臂12通过螺栓组固定连接在基座11上,机械臂12跟随基座11沿着横向导轨或纵向导轨移动;所述机械臂12由伺服电机驱动。
惯导传感器2位于机械臂12的旁侧且连接固定在基座11上,实时测量因风浪引起的数据变换并向计算机发送所测试的数据。
计算机分别与惯导传感器2、运动控制器3和视觉检测器4进行数据交换;所述计算机处理惯导传感器2输出的数据并进行处理以及建立模型、预测和输出数据;所述计算机向运动控制器3发送指令;所述计算机处理视觉检测器4的传输数据。
运动控制器3的一端与计算机进行数据交换,运动控制器3的另一端与机械臂12的伺服电机相连并控制机械臂12进行补偿运动。
视觉处理器4包括第一摄像机41和第二摄像机42;第一摄像机41与第二摄像机42分别安装在机械臂机构1上。
该补偿打捞机器人系统的工作方法为:
步骤一:视觉处理器4采集工件图像,经计算机计算处理对工件进行标定确定工件特征模形和工件在视觉处理器4和机械臂12中位置坐标的映射关系。具体而言,首先要提供标定板,该标定板具有与待打捞的工件相同的特征图形,也即标定板的尺寸与待打捞的工件相同,确定打捞工件的图像捕捉搜索范围。之后,通过安装定位确定标定板在机械臂机构1中的位置,接下来,启动机械臂12带动第一摄像机41和第二摄像机42采集标定板信息,并根据采集到的图像制作特征模板,该模板中包含特征图形的位置和形状等参数。最后根据标定板上的特征图形在机械臂12的坐标参数及对应的特征图形在第一摄像机41和第二摄像机42的坐标系统中的位置,确定双目摄像机的坐标系统和机械臂坐标系统之间的映射关系。
步骤二:通过波浪补偿系统和计算处理工件特征图形的位置确定机械臂和工件处于相对静止状态。惯导传感器2安装在机械臂基座11上,所谓惯导传感器2可提供载体的加速度、角速度等三维运动参数,并且根据上述参数得出载体的位置、姿态等重要信息。姿态参考系统利用加速度传感器、陀螺仪以及电子罗盘对载体运动参数和方位进行测量,通过对测量值加以处理和计算,实现对载体的位置和运动状态进行实时跟踪监控。惯性测量单元利用加速度传感器和陀螺仪对载体加速度和角速度进行测量,以得到载体在惯性参考系下的运动和状态的装置。
惯导传感器2检测到船舶的横摇、纵摇和艏摇运动参数,并将数据传递给运动控制器3,运动控制器3根据船舶的位移和速度变化率的大小,经过处理得到数字信号,在经D/A转换器得到模拟信号,模拟信号以脉冲的形式传递给机械臂伺服驱动器,伺服驱动器根据脉冲信号的大小,决定伺服电机的转速和转向,伺服电机驱动机械臂完成波浪补偿功能;同时,检测系统不断地将检测到的船舶的实际位移、速度等参数反馈给运动控制器,运动控制器根据位移和速度的变化率的大小在计算出下一周期控制信号的大小,并将其传递给机械臂伺服驱动器,进行下一周期的控制。
同时,第一摄像机41和第二摄像机42采集工件的图像,并在得到的工件图像中寻找与所述特征模板匹配的特征图像,通过摄像机的采集图像,得到工件图像,该图像为二维图像,在通过之前得到标定的模板图像进行比对,寻找所采集到的工件特征图像,特征图像经计算机提取出反映执行器和工件的位姿偏差信息,该信息称为图像特征误差,在通过图像的特征误差得到机器人运动位置增量,并将其传递给机器人控制器,机器人控制器传递给机械臂伺服驱动器,伺服驱动器根据控制信号的大小,决定伺服电机的转速和转向,伺服电机驱动机械臂12完成运动增量,以达到机械臂12与工件处于相对静止状态。具体而言,计算工件的特征图像分别在第一摄像机41和第二摄像机42的坐标系统中的位置;根据先前得到的第一摄像机41和第二摄像机42的坐标系统和机械臂的坐标系统的映射关系进行坐标变换,将工件的特征图像的位置从第一摄像机41和第二摄像机42的坐标系内坐标转换为机械臂12的坐标系统内的坐标。
步骤三:在机械臂12与工件相对静止的状态下,摄像机采集的图像经计算机处理后获得与特征模板匹配的工件的特征图形。具体而言,通过第一摄像机41和第二摄像机42采集工件的图像,得到两张该工件的图像,该工件图像为二维图像,也即平面图像。之后,通过计算机先前得到的特征模板,在采集得到的工件图像上寻找特征图形,得到图像中与特征模形匹配的工件的特征图形。
步骤四:摄像机采集图像经计算机利用标定参数确定工件位置,具体而言,计算机通过计算工件的两个特征图形分别在第一摄像机41和第二摄像机42的坐标系统中的位置,根据先前得到的第一摄像机41和第二摄像机42的坐标系统与机械臂坐标系统的映射关系进行变换,将工件的两个特征图形的位置从第一摄像机41和第二摄像机42的坐标系统内的坐标转换为机械臂坐标系统内的坐标,确定工件在机械臂坐标系统中的坐标位置。
步骤五:工件和机械臂处于相对静止的位置根据机械臂路径规划算法,计算出最为合理的路径规划。具体而言,机械臂根据工件在待抓取的位置(X,Y,Z)坐标参数,按照机械臂预先设定的算法生成最为合理规划路径,该设定算法可以是本领域各种适当类型的算法。
步骤六:根据规划路径准确、高效的完成打捞任务。具体而言,机械臂12根据生成的规划路径计算出机械臂12的每个伺服电机的运动补偿数据,并以此将执行器自动、准确的传送至工件位置实行抓取。在完成抓取动作后,控制器记录补偿、抓取过程的信息数据并保存下来。
本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
一种波浪补偿打捞机器人系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0