








专利摘要
本发明公开了一种智能化自主组网地震预警装备及方法,该装备中:地震监测前端由数据采集、边缘计算和协同通信模块组成,具备自主组网能力,用于实现智能化强震识别、预警计算和鲁棒通信;采集模块,包括GNSS模块和MEMS加速度计;计算模块,采用嵌入式微型处理器,用于根据多源监测数据进行地震触发确认信号和地震波信息的实时解算,若地震触发确认信号大于设定阈值,则联立自组网内所有识别出震动的地震监测前端组成临时监测网,形成组网式强震互判和组网式地震预警信息解算;通信模块,采用支持远距离无线传输的射频芯片;用于组建智能无线通信自组网,传输和接收计算模块得到的地震波和预警信息。本发明可以广泛地应用在地震预警系统中,具有低成本、低功耗、自主化、智能化、高时效性和高可靠性等优点。
权利要求
1.一种智能化自主组网地震预警装备,其特征在于,该装备包括多个分布式设置的地震监测前端,以及设置在远程的接收终端;其中:
地震监测前端,具备自主组网能力,用于实现一体化的数据采集、边缘计算和协同通信功能,实现智能化强震识别、预警计算和鲁棒通信;地震监测前端包括以下模块:
多源数据采集模块,包括GNSS模块和MEMS加速度计;用于实时采集地震监测的多源监测数据;
计算模块,采用支持边缘计算的嵌入式微型处理器;用于根据多源监测数据进行地震触发确认信号的播发和地震波信息的实时解算,若地震触发确认信号数量大于设定阈值,则联立自组网内所有识别出震动的地震监测前端组成临时监测网,形成组网式强震互判和组网式地震预警信息解算;
通信模块,采用支持远距离无线传输的射频芯片;用于组建智能无线通信自组网,传输和接收计算模块得到的地震波和预警信息;
接收终端,用于接收地震监测前端发送来的预警计算结果,根据结果发出预警;
计算模块中实现组网式强震互判和组网式地震预警信息解算的具体方法为:
识别到震动的地震监测前端使用泛洪法向周围所有前端节点单跳播发单帧的地震触发确认信号,若有单个地震监测前端接收到的地震触发确认信号数量大于三,则确认该区域地震发生,将联立所有识别出震动的地震监测前端组成临时监测网,形成组网式强震互判,否则关闭各前端的GNSS模块的采集功能;
临时监测网通过所有前端IP和路由表路由信息,智能辨识出与网内所有前端通信时间最短的可用监测前端为临时计算监测前端,来以最短通信路径接收网内所有监测前端计算的地震波信息,进行组网解算地震的震中、发震时刻和震级预警信息。
2.根据权利要求1所述的智能化自主组网地震预警装备,其特征在于,计算模块中播发地震触发确认信号和实时解算地震波信息具体方法为:
地震监测前端实时进行加速度采集,并根据加速度数据自主判断震动是否触发,若触发则播发地震触发确认信号,并开启多源数据采集模块的GNSS模块,采集GNSS和加速度多源数据;在持续一定时间的GNSS观测后,再根据加速度数据和组网式地震互判结果进行地震判定;若判定为非震动状态,则关闭GNSS采集,以减少耗能和信息流量;若判定为震动状态,则继续GNSS采集,并重复上述步骤,直到非震动状态;
地震监测前端自主集成GNSS和加速度数据,实时计算厘米至毫米级精度的地震位移和速度时间序列,再拾取地震波到时以计算地震波的卓越周期和最大幅值。
3.一种智能化自主组网地震预警方法,其特征在于,该方法包括以下步骤:
S1、通过分布式设置的多个地震监测前端进行智能化自主组网,地震监测前端自主进行震动识别;
S2、识别到震动的地震监测前端播发地震触发确认信号,并进行加速度和GNSS的多源数据采集,实时解算地震波信息;
S3、若有单个地震监测前端接收到的地震触发确认信号数量大于或等于设定的阈值,则联立并实时接入所有识别出震动的监测前端组成临时监测网,形成组网式强震互判;
S4、若地震监测前端接收到的地震触发确认信号数量均小于阈值,关闭各个地震监测前端的GNSS模块;
S5、临时监测网辨识出与网内各个地震监测前端通信时间最短的可用地震监测前端,将其作为计算监测前端;
S6、计算监测前端接收临时监测网内所有地震监测前端计算的卓越周期、最大幅值和地震波到时,解算得到预警信息,包括:地震的震中、发震时刻和震级;
S7、计算监测前端通过通信模块和智能无线自主通信网,以多个路径向附近多个通信基站、用户接收终端和预警中心播发地震预警信息。
4.根据权利要求3所述的智能化自主组网地震预警方法,其特征在于,步骤S2前端解算地震波信息的具体实现方法为:
S21、识别到震动的地震监测前端开启多源数据采集模块的GNSS模块,同步采集GNSS和加速度多源观测数据,其中GNSS数据包括广播星历、伪距和载波相位观测值,加速度数据为加速度计自身惯性坐标系对齐“ENU”坐标系的三轴线性加速度观测值;
S22、地震监测前端自主集成GNSS和加速度数据,实时计算厘米至毫米级精度的地震位移、速度和加速度时间序列;
S23、地震监测前端基于上述地震波时间序列拾取地震波到时以计算地震波的卓越周期和最大幅值的地震波信息。
5.根据权利要求4所述的智能化自主组网地震预警方法,其特征在于,步骤S22的具体计算方法为:
S221、构建ENU坐标系转换地心地固坐标系ECEF的坐标变换矩阵,将加速度ENU三分量转为ECEF三分量,与GNSS保持在同一个坐标基准下;且加速度计由GPS授时确保时间基准对齐到GPS时间;
S222、为适用于低成本前端边缘计算,减少计算量和通信资源,采用改进的载波相位历元差分法来集成GNSS和加速度,在无需外界辅助信息的前提下实现位移和速度信息的高精度解算,即在上述时空间基准统一的基础上,构建如下GNSS载波相位与加速度组合观测方程:
式中,λ
S223、构建状态方程:
式中,待估参数向量包括位置参数向量r
S224、基于上述观测方程和状态方程,卡尔曼滤波实时估计出前端的位置、速度和加速度参数,并转换到ENU坐标系,获取监测前端位移D=(d
S225、对获取的位移做去趋势项处理,即选择前60秒的位移进行最小二乘线性拟合系数估计,用于去除整个震动期间获取的位移的线性偏差。
6.根据权利要求5所述的智能化自主组网地震预警方法,其特征在于,步骤S23的具体计算方法为:
S231、地震监测前端基于集成解算的垂直向加速度a
S232、地震监测前端基于集成解算的垂直向位移d
其中积分时间τ
S233、地震监测前端基于上述集成解算的位移D(t)和速度V(t)时间序列,计算该前端的P波到时t
7.根据权利要求3所述的智能化自主组网地震预警方法,其特征在于,步骤S6解算预警信息的具体实现方法为:
S61、临时监测网内监测前端数量大于等于4时,计算监测前端接收网内所有前端计算和更新的地震波到时、卓越周期和最大幅值;
S62、计算监测前端基于各监测前端的坐标(x
S63、计算监测前端基于各监测前端的地震波卓越周期τ
S64、随着临时监测网的实时更新,实时并入地震触发的监测前端,并基于网内所有前端更新的地震波信息,计算监测前端则重复上述S61-S63过程,来实时更新震中和震级预警信息。
8.根据权利要求3所述的智能化自主组网地震预警方法,其特征在于,智能无线通信自组网的具体实现方法为:
地震监测前端的通信模块采用支持远距离无线传输的射频芯片,具有路由和数据转发功能,可实现前端之间的互通信;
识别到震动的地震监测前端使用泛洪法向周围所有前端节点单跳播发单帧的地震触发确认信号,若有单个前端接收到的地震触发确认信号数量大于或等于设定的阈值,则联立并实时接入识别出震动的监测前端组成临时监测网,该临时监测网自主组织和维护的通信网络即为智能无线通信自组网;
该智能无线通信自组网采用MESH网拓扑结构,地震监测前端的通信模块为Mesh路由器节点,负责自组织和维护网络,采用多跳的网络方式进行数据交换和路由,其网关功能支持有线或无线连接到Internet,其路由选择和桥接中继功能支持选择最佳的无线链路连接路径;
地震监测前端的通信模块移植了AODV路由协议,支撑该无线通信自组网的路由工作,数据传输时,源节点首先查找路由表中已有路由路径,若有则按照查询到的最优路径传输,若无则发起路由发现,采用逐级跳跃路由机制向附近节点进行路由广播,收到路由请求的节点则返回响应信息,建立路径和更新路由表路径信息,若无节点相应,则表明该节点下游都处于失效状态,则发起路由错误并删除上游节点中该路径的路由信息,再寻找其他新的路径;
基于AODV路由协议,通过向地震监测前端的初始路由表写入最优路由路径和实时更新有效的路由路径,实现临时计算监测前端的智能判定和多个路径传输预警信息的鲁棒通信。
9.根据权利要求8所述的智能化自主组网地震预警方法,其特征在于,智能化自组网鲁棒通信中,地震计算监测前端解算出包括发震时刻、震中和震级的地震预警信息,以多个路径向附近多个通信基站和预警中心传输,避免单个前端台站或通信基站损坏导致的通信中断。
说明书
技术领域
本发明涉及地震预警技术领域,尤其涉及一种智能化自主组网地震预警装备及方法。
背景技术
地震预警系统(EEWs)是指依托潜在震源地附近的地震台网,在震后以最短时间内快速估算地震位置、影响范围和震害程度,在破坏性的S波和面波到达预警区域前发布警报的实时地震信息处理系统。地震预警系统作为有效减轻地震灾害的手段之一,要求其能以最短的时间内为预警区提供可靠的地震参数预警信息,因此具有高度的实效性和可靠性要求。
然而,地震预警系统要提供更可靠的地震参数则需要更长时间的地震动数据和更多台站的测量数据,但随着数据量的剧增,对通讯网络和数据处理中心带来压力,会造成网络堵塞及故障而增大系统的整体数据延时,进而影响系统的实效性。此外,依赖于固定通信基站或网关的传输网络,在大震损坏基站或网关后,台站数据无法传出,导致整个系统陷于瘫痪。而地震预警系统依赖于单一的数据处理中心,存在运算崩溃或受大震损坏而导致整个系统无法运行的风险。
发明内容
本发明要解决的技术问题在于针对现有技术中的缺陷,提供一种智能化自主组网地震预警装备及方法,集成了低成本的数据采集、边缘计算和协同通信模块以组成的一体化地震监测前端,具备智能化的自主组网式强震识别、预警计算和鲁棒通信能力。
本发明解决其技术问题所采用的技术方案是:
本发明提供一种智能化自主组网地震预警装备,该装备包括多个分布式设置的地震监测前端,以及设置在远程的接收终端;其中:
地震监测前端,具备自主组网能力,用于实现一体化的数据采集、边缘计算和协同通信功能,实现智能化强震识别、预警计算和鲁棒通信;地震监测前端包括以下模块:
多源数据采集模块,包括GNSS模块和MEMS加速度计;用于实时采集地震监测的多源监测数据;
计算模块,采用支持边缘计算的嵌入式微型处理器;用于根据多源监测数据进行地震触发确认信号的播发和地震波信息的实时解算,若地震触发确认信号数量大于设定阈值,则联立自组网内所有识别出震动的地震监测前端组成临时监测网,形成组网式强震互判和组网式地震预警信息解算;
通信模块,采用支持远距离无线传输的射频芯片;用于组建智能无线通信自组网,传输和接收计算模块得到的地震波和预警信息;
接收终端,用于接收地震监测前端发送来的预警计算结果,根据结果发出预警。
进一步地,本发明的计算模块中实现地震触发确认信号的播发和地震波信息的实时解算的具体方法为:
地震监测前端实时进行加速度采集,并根据加速度数据自主判断震动是否触发,若触发则播发地震触发确认信号,并开启多源数据采集模块的GNSS模块,采集GNSS和加速度多源数据;在持续一定时间的GNSS观测后,再根据加速度数据进行震动判定;若判定为非震动状态,则关闭GNSS采集,以减少耗能和信息流量;若判定为震动状态,则继续GNSS采集,并重复上述步骤,直到非震动状态。
地震监测前端自主集成GNSS和加速度数据,实时计算厘米至毫米级精度的地震位移和速度时间序列,再拾取地震波到时以计算地震波的卓越周期和最大幅值。
进一步地,本发明的计算模块中实现组网式强震互判和组网式地震预警信息解算的具体方法为:
识别到震动的地震监测前端使用泛洪法向周围所有前端节点单跳播发单帧的地震触发确认信号,若有单个地震监测前端接收到的地震触发确认信号数量大于三,则确认该区域地震发生,将联立所有识别出震动的地震监测前端组成临时监测网,形成组网式强震互判,否则关闭各前端的GNSS模块的采集功能;
临时监测网通过所有前端IP和路由表路由信息,智能辨识出与网内所有前端通信时间最短的可用监测前端为临时计算监测前端,来以最短通信路径接收网内所有监测前端计算的地震波信息,进行组网解算地震的震中、发震时刻和震级等预警信息。
本发明提供一种智能化自主组网地震预警方法,该方法包括以下步骤:
S1、通过分布式设置的多个地震监测前端进行智能化自主组网,地震监测前端自主进行震动识别;
S2、识别到震动的地震监测前端播发地震触发确认信号,并进行加速度和GNSS的多源数据采集,实时解算地震波信息;
S3、若有单个地震监测前端接收到的地震触发确认信号数量大于或等于设定的阈值,则联立并实时接入所有识别出震动的监测前端组成临时监测网,形成组网式强震互判;
S4、若地震监测前端接收到的地震触发确认信号数量均小于阈值,关闭各个地震监测前端的GNSS模块;
S5、临时监测网辨识出与网内各个地震监测前端通信时间最短的可用地震监测前端,将其作为计算监测前端;
S6、计算监测前端接收临时监测网内所有地震监测前端计算的卓越周期、最大幅值和地震波到时,解算得到预警信息,包括:地震的震中、发震时刻和震级;
S7、计算监测前端通过通信模块和智能无线自主通信网,以多个路径向附近多个通信基站、用户接收终端和预警中心播发地震预警信息。
进一步地,本发明的步骤S2前端解算地震波信息的具体实现方法为:
S21、识别到震动的地震监测前端开启多源数据采集模块的GNSS模块,同步采集GNSS和加速度多源观测数据,其中GNSS数据包括广播星历、伪距和载波相位观测值,加速度数据为加速度计自身惯性坐标系对齐“ENU”坐标系的三轴线性加速度观测值;
S22、地震监测前端自主集成GNSS和加速度数据,实时计算厘米至毫米级精度的地震位移、速度和加速度时间序列;
S23、地震监测前端基于上述地震波时间序列拾取地震波到时以计算地震波的卓越周期和最大幅值的地震波信息。
进一步地,本发明的步骤S22的具体计算方法为:
S221、构建ENU坐标系转换地心地固坐标系ECEF的坐标变换矩阵,将加速度ENU三分量转为ECEF三分量,与GNSS保持在同一个坐标基准下;且加速度计由GPS授时确保时间基准对齐到GPS时间;
S222、为适用于前端边缘计算,减少计算量和通信资源,采用改进的载波相位历元差分法来集成GNSS和加速度,在无需外界辅助信息的前提下实现位移和速度等信息的高精度解算,即在上述时空间基准统一的基础上,构建GNSS载波相位与加速度组合观测方程:
式中,λi为i频率对应的波长, 为r测站观测s1和s2两颗卫星的载波相位观测值的星间单差在t和t-1两个历元之间的差分观测值,其中星间单差被用于消除低成本接收机钟差不稳定的影响,如含有双频观测值则为无电离层观测值;eat表示该t历元由加速度更新获得的位置计算的站星方向矢量,rt为测站位置矢量rt=(x,y,z),rat为该t历元由加速度更新获得的位置矢量, 为该t历元由加速度更新获得的位置矢量计算的星间单差站星几何距离, 为t-1历元的星间单差站星几何距离, 为t和t-1两个历元之间的星间单差卫星钟差,ΔεΦ(t,t-1)为如电离层、对流层等残留的差分载波相位误差, 为测量噪声, 为零均值白噪声,服从 为差分载波相位的测量方差;At为测量加速度矢量At=(Ax,Ay,Az),at为待估计加速度矢量,b为加速度基线偏差,εA为加速度测量噪声,服从 为加速度的测量方差;
S223、构建状态方程:
式中,待估参数向量包括位置参数向量rk,速度参数向量vk,加速度参数向量ak,I为单位矩阵,τ为加速度采样时间间隔,wk系统噪声向量,服从wk~N(0,Qk),Qk为过程噪声方差阵,bk为基线偏差,被作为随机游走进行估计,εb为bk的系统噪声向量,服从 为基线偏差bk的过程噪声;
S224、基于上述观测方程和状态方程,卡尔曼滤波实时估计出前端的位置、速度和加速度等参数,并转换到ENU坐标系,获取监测前端位移D=(dE,dN,dU)、速度V=(vE,vN,vU)和基线校正后的加速度A=(aE,aN,aU)时间序列;
S225、对获取的位移做去趋势项处理,即选择前60秒的位移进行最小二乘线性拟合系数估计,用于去除整个震动期间获取的位移的线性偏差。
进一步地,本发明的步骤S23的具体计算方法为:
S231、地震监测前端基于集成解算的垂直向加速度aU(t)时间序列,采用STA/LTA法和AIC准则联合解算该前端的地震波P波到时t0;
S232、地震监测前端基于集成解算的垂直向位移dU(t)和速度vU(t)时间序列,计算该前端的地震波卓越周期τc:
其中积分时间τ0=3s;
S233、地震监测前端基于上述集成解算的位移D(t)和速度V(t)时间序列,计算该前端的P波到时t0之后每秒更新的三维最大峰值位移Pd和三维最大峰值速度Pv。
进一步地,本发明的步骤S6解算预警信息的具体实现方法为:
S61、临时监测网内监测前端数量大于等于4时,计算监测前端接收网内所有前端计算和更新的地震波到时、卓越周期和最大幅值;
S62、计算监测前端基于各监测前端的坐标(xi,yi,zi)和地震波到时Ti,采用非线性最小二乘法实时估计地震的震中坐标(x,y,z)、发震时刻T和地震波P波传播速度V,其观测方程为:
S63、计算监测前端基于各监测前端的地震波卓越周期τc、三维最大峰值位移Pd和三维最大峰值速度Pv分别确定震级 和 然后取三者的均值为该前端的实时震级,待前端震动触发时间大于3s后,网内所有前端计算的实时震级的均值作为实时震级进行播报;
S64、随着临时监测网的实时更新,实时并入地震触发的监测前端,并基于网内所有前端更新的地震波信息,计算监测前端则重复上述S61-S63过程,来实时更新震中和震级等预警信息。
进一步地,本发明的智能无线通信自组网的具体实现方法为:
地震监测前端的通信模块采用支持远距离无线传输的射频芯片,具有路由和数据转发功能,可实现前端之间的互通信;
识别到震动的地震监测前端使用泛洪法向周围所有前端节点单跳播发单帧的地震触发确认信号,若有单个前端接收到的地震触发确认信号数量大于或等于设定的阈值,则联立并实时接入识别出震动的监测前端组成临时监测网,该临时监测网自主组织和维护的通信网络即为智能无线通信自组网;
该智能无线通信自组网采用MESH网拓扑结构,地震监测前端的通信模块为Mesh路由器节点,负责自组织和维护网络,采用多跳的网络方式进行数据交换和路由,其网关功能支持有线或无线连接到Internet,其路由选择和桥接中继功能支持选择最佳的无线链路连接路径;
地震监测前端的通信模块移植了AODV路由协议,支撑该无线通信自组网的路由工作,数据传输时,源节点首先查找路由表中已有路由路径,若有则按照查询到的最优路径传输,若无则发起路由发现,采用逐级跳跃路由机制向附近节点进行路由广播,收到路由请求的节点则返回响应信息,建立路径和更新路由表路径信息,若无节点相应,则表明该节点下游都处于失效状态,则发起路由错误并删除上游节点中该路径的路由信息,再寻找其他新的路径;
基于AODV路由协议,通过向地震监测前端的初始路由表写入最优路由路径和实时更新有效的路由路径,实现临时计算监测前端的智能判定和多个路径传输预警信息的鲁棒通信。
进一步地,本发明的智能化自组网鲁棒通信中,地震计算监测前端解算出包括发震时刻、震中和震级的地震预警信息,以多个路径向附近多个通信基站和预警中心传输,避免单个前端台站或通信基站损坏导致的通信中断。
本发明产生的有益效果是:本发明的智能化自主组网地震预警装备及方法能够带来以下优点:
1.本发明采用低成本模块所集成的一体化地震数据采集、计算和通信设备作为地震监测前端,可用于低成本高密度地震监测预警台网的快速建立和维护。
2.本发明支持智能化自主组网式强震识别和多源数据采集,能有效实现震动监测前端的自主组网和网内强震互判,仅在地震判定下采集网内监测前端的GNSS和加速度多源数据,进而降低功耗和无效数据采样,节省通讯资源,同时也避免了因外界环境造成的单站预警失误。
3.本发明支持地震信息边缘计算和智能化自主组网预警计算,能够实现地震监测前端在不需要任何外部增强信息的条件下自主解算地震信息,且仅少量边缘计算的有效解算结果在网内传输,大大降低数据通信量和处理压力,提高了系统时效性,同时自主组网确定最短通讯路径和有效计算前端,也避免了网络堵塞和单一计算中心瘫痪的风险。
4.本发明支持智能化自主组网鲁棒通信,能够支持多跳、多节点、长距离通信,支撑网内监测前端互通信、网内最短路径智能判别和多路径预警信息播发,整个网络具有较高的鲁棒性和抗干扰能力,进而能克服破坏性地震导致通信基础设施或部分台站故障损坏的情况下无法完成地震信息有效传输的问题,具有较强的抗毁性。此外还具有使用方便,结构灵活,低成本,高带宽等优点。
附图说明
下面将结合附图及实施例对本发明作进一步说明,附图中:
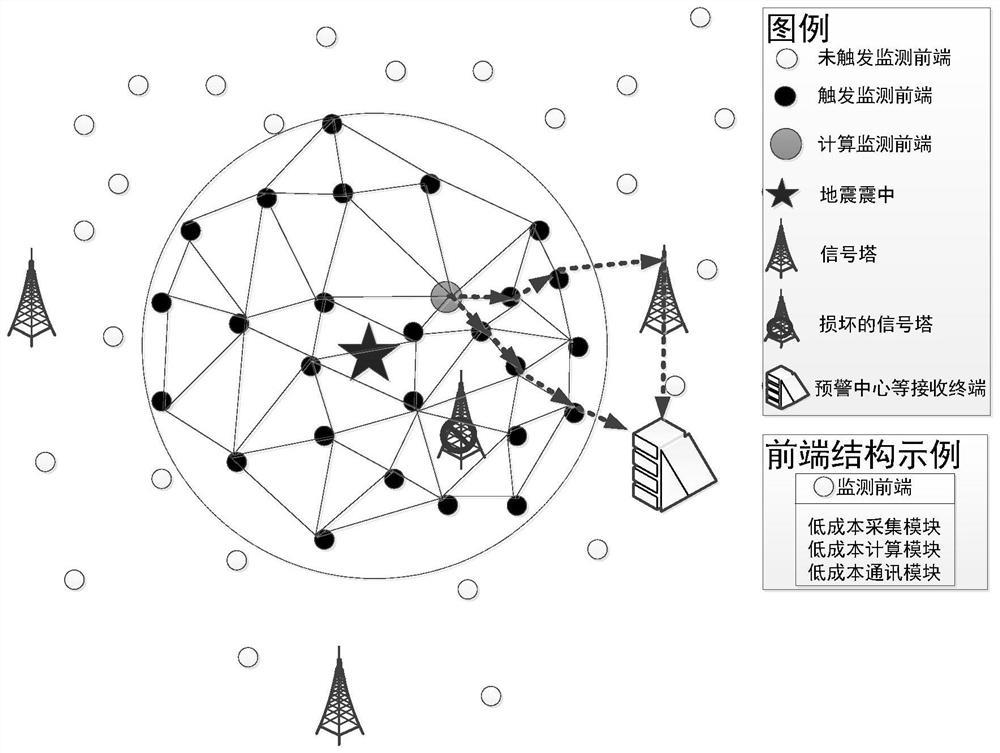
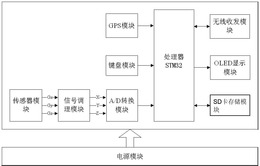
图1是本发明实施例的低成本的智能化自主组网地震预警装备构架图;
图2时本发明实施例的数据处理流程图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
如图1所示,本发明实施例的低智能化自主组网地震预警装备,由低成本的数据采集、边缘计算和协同通信模块所集成的一体化地震监测前端,具备自主组网能力,并形成智能化强震识别、预警计算和鲁棒通信的能力。
首先,地震监测前端自主进行地震识别,识别出震动的监测前端进行包括加速度和GNSS的多源数据采集,并实时计算厘米至毫米级精度的地震位移和速度时间序列,再拾取地震波到时以计算地震波的卓越周期和最大幅值,实现地震信息的边缘计算。
与此同时,识别出震动的监测前端彼此通讯进行自主组建临时监测网,网内所有前端进行组网式强震互判,若判定为地震,则辨识出与网内所有前端通信时间最短的可用监测前端作为计算监测前端,来接收网内所有监测前端计算的地震波信息,组网解算地震的震中、发震时刻和震级等预警信息。
最后,预警信息通过MESH网拓扑结构的智能无线通信自组网进行多径传输,即使破坏性地震导致部分通信基础设施或前端故障损坏的情况下依然能够完成地震信息有效传输。
如图2所示,本发明实施例的智能化自主组网地震预警方法,包括以下步骤:
S1、通过分布式设置的多个地震监测前端进行智能化自主组网,地震监测前端自主进行震动识别;
装备布设与测试的具体方法为:
如图1所示,在地震地区布设地震监测前端,建立低成本高密度地震监测台网。其地震监测前端由低成本的数据采集、运算和通信模块集成,具有自主数据采集、边缘计算和协同通信的能力。具体举例但不限于此例,其数据采集模块可由低成本的大众市场级别的GNSS芯片和低成本的微电子加速度传感器组成;其数据运算模块可采用低成本的嵌入式微处理器;其协同通信模块可采用支持远距离无线传输的低成本LoRa射频芯片。
地震监测前端安装后进行单站所有传感器数据采集测试,单站数据解算功能测试,IP申请和网关访问等通信功能测试。系统布设完毕后,进行联网遍历所有路径自主组网的采集、计算和通信测试,确保系统完整可用。
S2、识别到震动的地震监测前端进行加速度和GNSS的多源数据采集,并播发地震触发确认信号;
S21、识别到震动的地震监测前端开启多源数据采集模块的GNSS模块,同步采集GNSS和加速度多源观测数据,其中GNSS数据包括广播星历、伪距和载波相位观测值,加速度数据为加速度计自身惯性坐标系对齐“ENU”坐标系的三轴线性加速度观测值;
S22、地震监测前端自主集成GNSS和加速度数据,实时计算厘米至毫米级精度的地震位移、速度和加速度时间序列;
S221、构建ENU坐标系转换地心地固坐标系(ECEF)的坐标变换矩阵,将加速度ENU三分量转为ECEF三分量,与GNSS保持在同一个坐标基准下,即世界大地测量系统1984(WGS84)坐标系;且加速度计采模块由GPS授时确保时间基准对齐到GPS时;
S222、在上述时空间基准统一的基础上,构建GNSS载波相位与加速度组合观测方程:
式中,λi为i频率对应的波长, 为r测站观测s1和s2两颗卫星的载波相位观测值的星间单差在t和t-1两个历元之间的差分观测值,其中星间单差被用于消除接收机钟差不稳定的影响,如含有双频观测值则为无电离层观测值。eat表示该t历元由加速度更新获得的位置计算的站星方向矢量,rt为测站位置矢量rt=(x,y,z),rat为该t历元由加速度更新获得的位置矢量, 为该t历元由加速度更新获得的位置矢量计算的星间单差站星几何距离, 为t-1历元的星间单差站星几何距离, 为t和t-1两个历元之间的星间单差卫星钟差,ΔεΦ(t,t-1)为如电离层、对流层等残留的差分载波相位误差, 为测量噪声, 为零均值白噪声,服从 为差分载波相位的测量方差。At为测量加速度矢量At=(Ax,Ay,Az),at为待估计加速度矢量,b为加速度基线偏差,εA为加速度测量噪声,服从 为加速度的测量方差。
S223、构建状态方程:
式中,待估参数向量包括位置参数向量rk,速度参数向量vk,加速度参数向量ak,I为单位矩阵,τ为加速度采样时间间隔,wk系统噪声向量,服从wk~N(0,Qk),Qk为过程噪声方差阵,bk为基线偏差,被作为随机游走进行估计,εb为bk的系统噪声向量,服从 为基线偏差bk的过程噪声。
S224、基于上述观测方程和状态方程,卡尔曼滤波实时估计出前端的位置、速度和加速度等参数,并转换到ENU坐标系,获取监测前端位移D=(dE,dN,dU)、速度V=(vE,vN,vU)和基线校正后的加速度A=(aE,aN,aU)时间序列;
S225、对获取的位移做去趋势项处理,即选择前60秒的位移进行最小二乘线性拟合系数估计,用于去除整个震动期间获取的位移的线性偏差。
S23、地震监测前端基于上述地震波时间序列拾取地震波到时以计算地震波的卓越周期和最大幅值等地震波信息;本步骤进一步包括:
S231、地震监测前端基于上述集成解算的垂直向加速度aU(t)时间序列,采用STA/LTA法和AIC准则联合解算该前端的地震波P波到时t0;
S232、地震监测前端基于上述集成解算的垂直向位移dU(t)和速度vU(t)时间序列,计算该前端的地震波卓越周期τc:
其中积分时间τ0=3s。
S233、地震监测前端基于上述集成解算的位移D(t)和速度V(t)时间序列,计算该前端的P波到时t0之后每秒更新的三维最大峰值位移Pd和三维最大峰值速度Pv。
监测前端多源数据采集和地震信息边缘计算的具体方法为:
如图2所示,各监测前端实时采集加速度数据,并根据加速度数据判断地震是否触发。若前端被判断为地震触发(如图1黑色填充圆圈),则开启其GNSS模块,采集GNSS和加速度多源数据,在持续10分钟GNSS观测后,则进行震动判定,若判定为非震动状态,则关闭GNSS模块,否则继续GNSS观测,并重复上述步骤,直到不震动状态。
地震触发的监测前端在不需要任何外界增强信息的条件下,自主集成GNSS和加速度数据,实时计算厘米至毫米级精度的地震位移和速度时间序列,再拾取地震波到时以计算地震波的卓越周期和最大幅值,实现地震信息的单站边缘计算。
S3、若有单个地震监测前端接收到的地震触发确认信号数量大于或等于设定的阈值,则联立所有识别出震动的监测前端组成临时监测网,形成组网式强震互判;
智能化自主组网式强震识别和自主组网预警计算的具体方法为:
各监测前端被判定为地震触发时,其以最短路径向周围监测前端播发地震触发确认信号,若有单个监测前端接收到的地震触发确认信号数量大于三,则确认该区域地震发生,将联立所有识别出震动的监测前端组成临时监测网,进行自主组网式强震互判,否则为地震误判,将关闭各前端的GNSS模块和释放运算缓存。
如图2所示,若组网判定地震发生,则通过临时监测网内所有前端IP标识,智能辨识出与网内所有前端通信时间最短的可用监测前端作为计算监测前端(如图1绿色填充的大号圆),并以最短通信路径接收网内所有监测前端计算的地震波的卓越周期、最大幅值和地震波到时,进行组网解算地震的震中、发震时刻和震级等预警信息,实现智能化自主组网预警计算。
智能无线通信自组网的具体实现方法为:
地震监测前端的通信模块采用支持远距离无线传输的射频芯片,具有路由和数据转发功能,可实现前端之间的互通信;
识别到震动的地震监测前端使用泛洪法向周围所有前端节点单跳播发单帧的地震触发确认信号,若有单个前端接收到的地震触发确认信号数量大于或等于设定的阈值,则联立并实时接入识别出震动的监测前端组成临时监测网,该临时监测网自主组织和维护的通信网络即为智能无线通信自组网;
该智能无线通信自组网采用MESH网拓扑结构,地震监测前端的通信模块为Mesh路由器节点,负责自组织和维护网络,采用多跳的网络方式进行数据交换和路由,其网关功能可支持有线或无线连接到Internet,其路由选择和桥接中继功能可支持选择最佳的无线链路连接路径;
地震监测前端的通信模块移植了AODV路由协议,支撑该无线通信自组网的路由工作,数据传输时,源节点首先查找路由表中已有路由路径,若有则按照查询到的最优路径传输,若无则发起路由发现,采用逐级跳跃路由机制向附近节点进行路由广播,收到路由请求的节点则返回响应信息,建立路径和更新路由表路径信息,若无节点相应,则表明该节点下游都处于失效状态,则发起路由错误并删除上游节点中该路径的路由信息,再寻找其他新的路径;
基于AODV路由协议,通过向地震监测前端的初始路由表写入最优路由路径和实时更新有效的路由路径,可实现临时计算监测前端的智能判定和多个路径传输预警信息的鲁棒通信。
S4、若地震监测前端接收到的地震触发确认信号数量均小于阈值,关闭各个地震监测前端的GNSS模块;
S5、辨识出与网内各个地震监测前端通信时间最短的可用地震监测前端,将其作为各自的计算监测前端;
S6、计算监测前端接收网内所有地震监测前端计算的卓越周期、最大幅值和地震波到时,解算得到预警信息,包括:地震的震中、发震时刻和震级;
S7、计算监测前端通过通信模块和鲁棒自主通信网,以多个路径向附近多个通信基站、用户接收终端和预警中心播发地震预警信息。
智能化自主组网鲁棒播发地震预警信息的具体方法为:
各监测前端组成MESH网拓扑结构的智能无线通信自组网,故计算监测前端在解算出发震时刻、震中和震级等地震预警信息后,能够以多个路径向附近多个通信基站和预警中心传输地震信息,可避免部分监测台站或通信基站损坏导致的通信中断,具有较强的抗毁性。如图1所示,距离计算监测前端最近的信号塔因地震而损坏,则附近监测前端访问失败,而将访问失败信息反馈到通信自组网,通信自组网智能选取了其他多个通信时间最短路径(虚线箭头)播发到正常的信号塔或直接播发到具有接收模块的预警中心或其他终端,进而能破坏性地震导致通信基础设施或前端故障损坏的情况下完成地震信息有效传输。
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
一种智能化自主组网地震预警装备及方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0