







专利摘要
本发明提出一种超视距辐射源直接定位模型的性能分析方法,其方法包括:超视距辐射源定位系统的数学建模;入射角参量的费舍尔矩阵计算;辐射源位置参量的克拉美罗界计算。本发明所述方法在传统的视距辐射源定位性能分析中引入了超视距模型,给出了超视距条件下的辐射源定位的理论误差下限,突破了传统分析方法的局限性,能够有效地指导超视距定位系统设计。
权利要求
1.一种超视距辐射源直接定位模型的性能分析方法,其特征在于,包括如下步骤:
步骤1、超视距辐射源定位系统的数学建模;
步骤2、入射角参量的费舍尔矩阵计算;
步骤3、辐射源位置参量的克拉美罗界计算。
2.根据权利要求1所述的一种超视距辐射源直接定位模型的性能分析方法,其特征在于,所述步骤1具体为:
假设地球为一半径为r的理想球体,球面上存在单一目标辐射源;定位系统共配置有L个基站,每个基站包含一个具有M个天线单元的均匀线阵;令
其中
表示阵列的导向矢量,d为阵元间距,λ为入射信号波长;对于各基站阵列,规定指向北极点方向为0°方向,阵面相对于0°方向的顺时针偏角由α
其中
u′
P
3.根据权利要求1所述的一种超视距辐射源直接定位模型的性能分析方法,其特征在于,所述步骤2具体为:
入射角参量ψ
F=diag[f
其中
下标s和下标n用以区分信号和噪声,K代表快拍总数,a
4.根据权利要求1所述的一种超视距辐射源直接定位模型的性能分析方法,其特征在于,所述步骤3具体为:
入射角参量ψ
C=(GFG
其中G代表角度参量与位置参量的转换矩阵,其表达式为:
取C的对角线元素即得到辐射源位置参量的估计误差下限。
说明书
技术领域
本发明属于辐射源定位技术、雷达信号处理、阵列信号处理以及参数估计理论技术领域,特别是涉及一种超视距辐射源直接定位模型的性能分析方法。
背景技术
辐射源定位技术在雷达、声呐和无线通信领域都是一个重要的研究课题。在辐射源定位领域,多数研究将重点放在了辐射源定位方法的设计上,力求获得更有效的定位结果。而值得注意的是,同具体的定位方法一样,定位模型的理论性能分析也是辐射源定位技术的重要组成部分。尤其是在系统设计、阵型优化等工作中,模型的理论性能分析更是能起到至关重要的指导作用。
现有的辐射源直接定位模型的性能分析方法均只适用于视距范围内的目标,在实际应用中存在局限性。本发明中给出了一种适用于超视距辐射源直接定位模型的性能分析方法,该方法从克拉美罗界的角度给出了超视距定位系统的估计误差下限,能够对超视距定位系统设计提供有效的理论支撑。
发明内容
本发明的目的在于改善现有技术的局限性,提供了一种超视距辐射源直接定位模型的性能分析方法,该方法能够有效地给出超视距辐射源直接定位系统的理论误差下限。
本发明的目的是通过以下技术方案实现:一种超视距辐射源直接定位模型的性能分析方法,包括如下步骤:
步骤1、超视距辐射源定位系统的数学建模;
步骤2、入射角参量的费舍尔矩阵计算;
步骤3、辐射源位置参量的克拉美罗界计算。
进一步地,所述步骤1具体为:
假设地球为一半径为r的理想球体,球面上存在单一目标辐射源;定位系统共配置有L个基站,每个基站包含一个具有M个天线单元的均匀线阵;令 代表球坐标系下辐射源的位置,其中上标s代表球坐标系,下标t代表目标,θt代表目标的俯仰角, 代表目标的方位角;nl(k)代表功率为 的加性高斯白噪声矢量,其中k代表第k个快拍,下标n代表噪声;sl(k)代表入射信号,则第l个基站的接收数据表示为:
其中
表示阵列的导向矢量,d为阵元间距,λ为入射信号波长;对于各基站阵列,规定指向北极点方向为0°方向,阵面相对于0°方向的顺时针偏角由αl表示;令 表示球坐标系下各基站位置,其中上标s代表球坐标系,下标l代表第l个基站,θl代表基站l的俯仰角, 代表基站l的方位角;入射信号与阵面夹角记为ψl,其与 的关系可由下式给出:
其中
u′0,l=PUu0,l u′t,l=PUut,l
PU=U(U
为北极点坐标; 和 分别为直角坐标系下辐射源位置和基站位置坐标,其中上标c代表直角坐标系; 和 为过 的球面切平面xxl+yyl+zzl=r
进一步地,所述步骤2具体为:
入射角参量ψl的费舍尔矩阵具有如下形式:
F=diag[f1(ψ1) f2(ψ2) … fL(ψL)]
其中
下标s和下标n用以区分信号和噪声,K代表快拍总数,al(ψl)代表以入射角参量为自变量的阵列导向矢量。
进一步地,所述步骤3具体为:
入射角参量ψl的费舍尔矩阵F与辐射源位置参量的克拉美罗界矩阵C有如下关系:
C=(GFG
其中G代表角度参量与位置参量的转换矩阵,其表达式为:
取C的对角线元素即得到辐射源位置参量的估计误差下限。
本发明所述方法在传统的视距辐射源定位性能分析中引入了超视距模型,给出了超视距条件下的辐射源定位的理论误差下限,突破了传统分析方法的局限性,能够有效地指导超视距定位系统设计。
附图说明
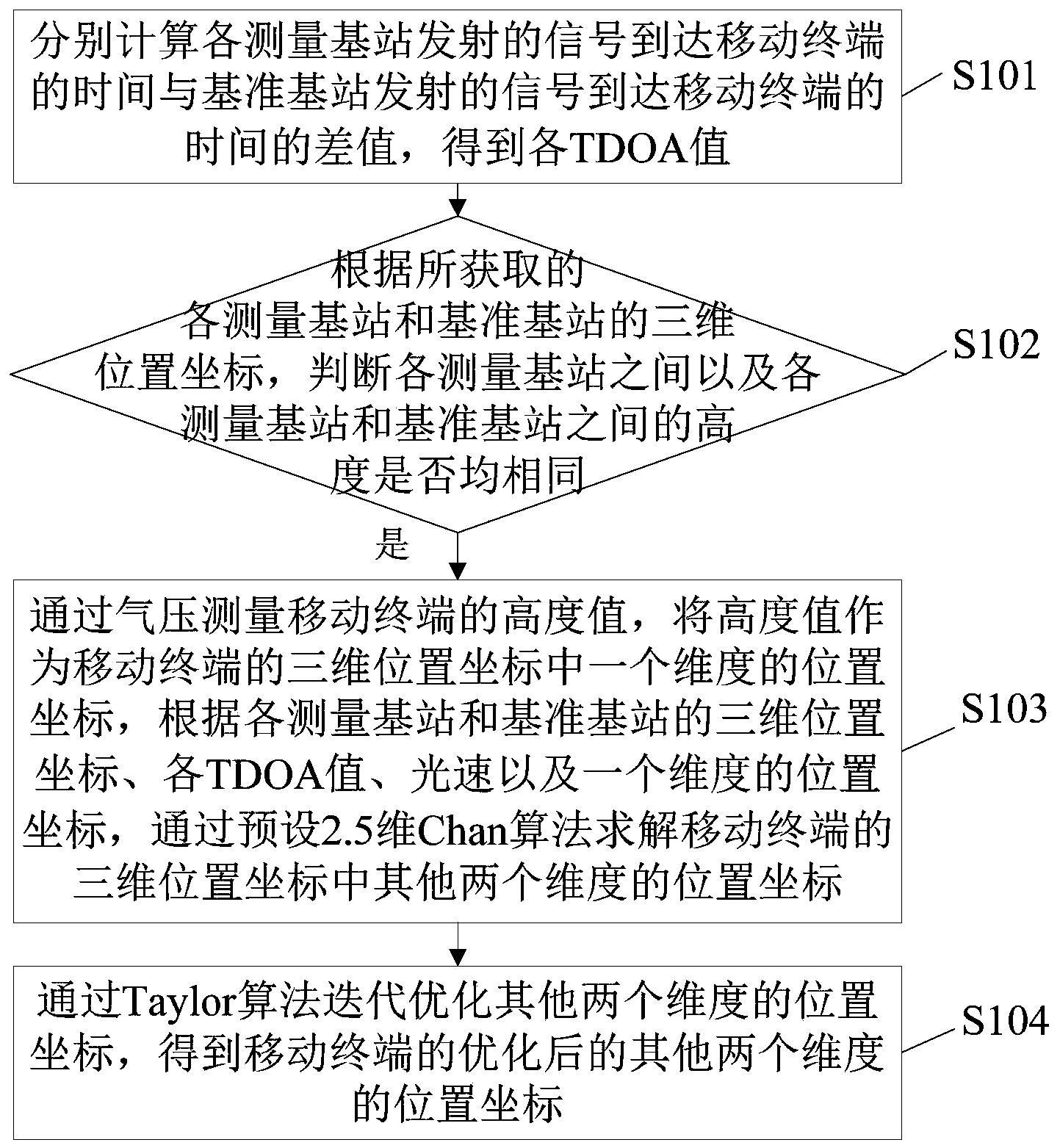
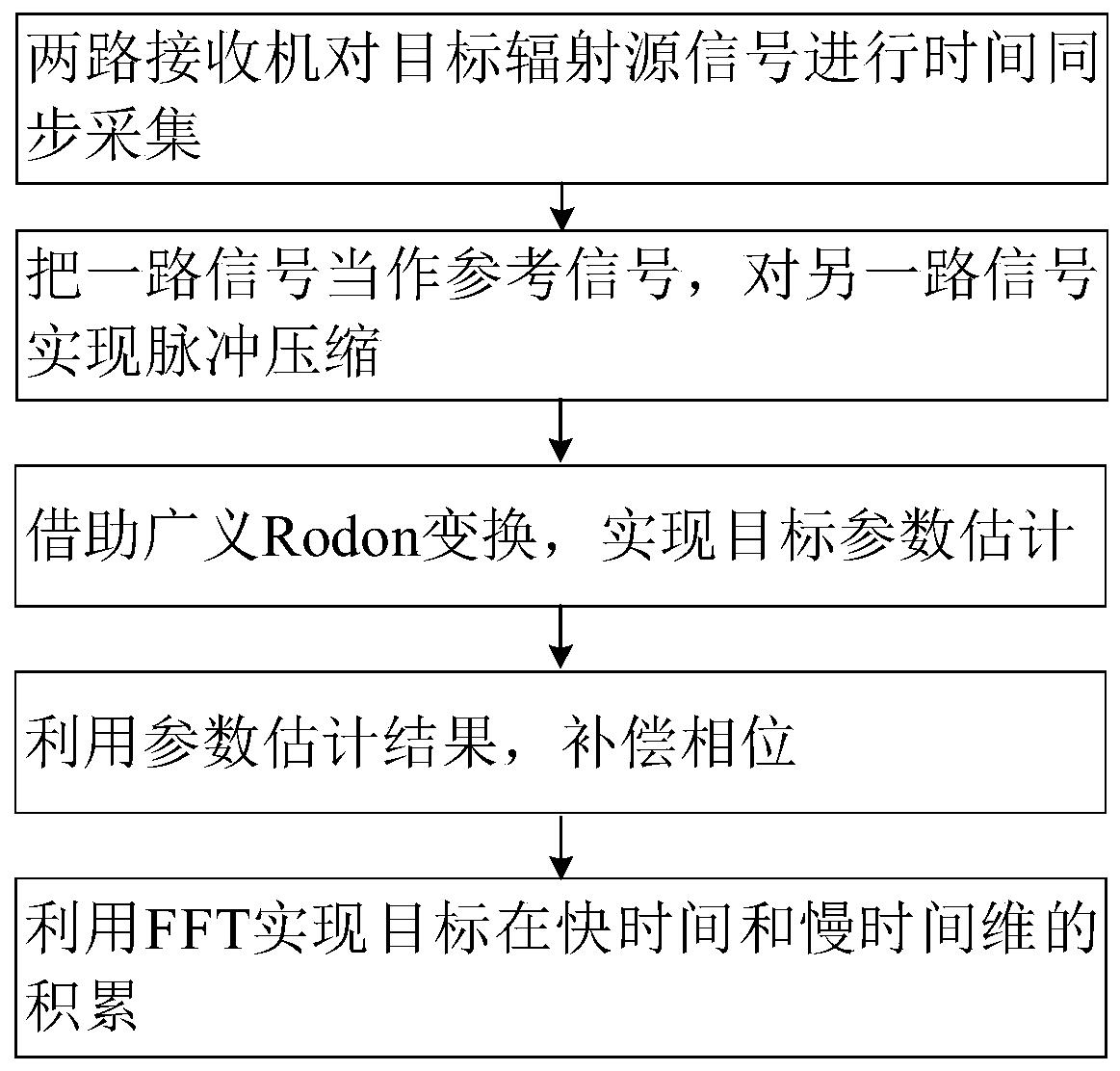
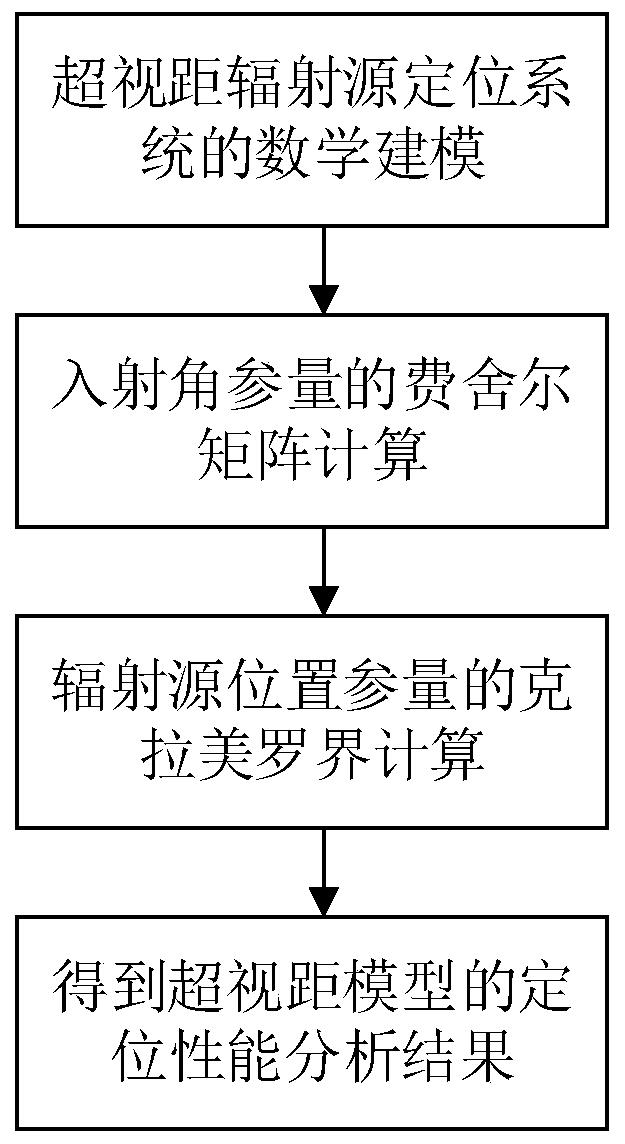
图1为本发明所述方法流程图;
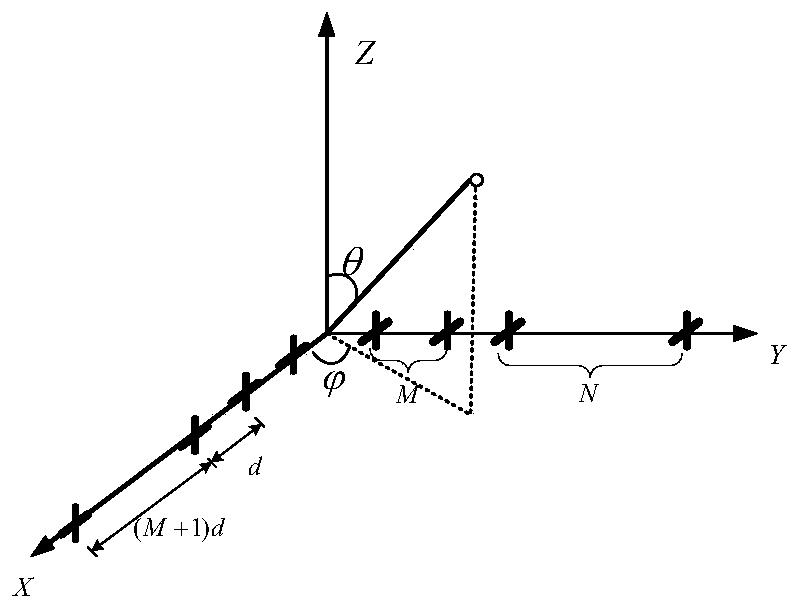
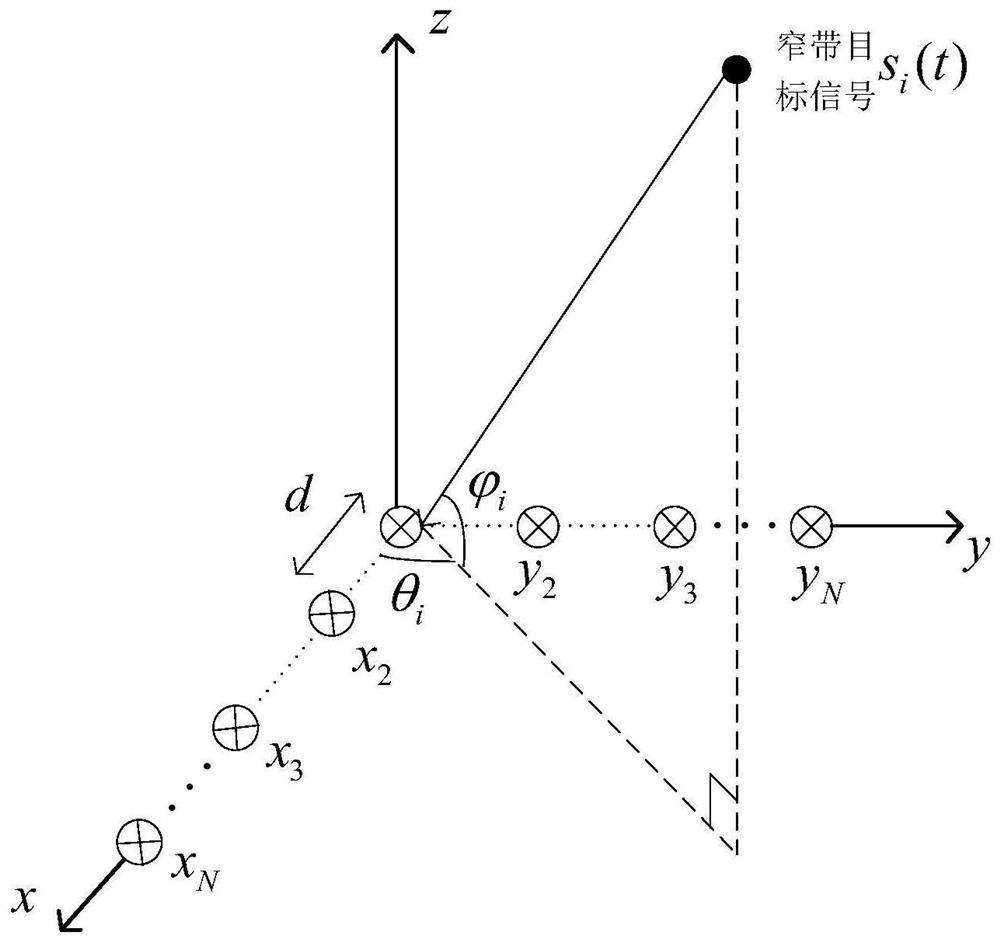
图2为超视距传播条件下的辐射源定位系统示意图;
图3为超视距辐射源定位理论误差下限与最大似然定位算法均方误差曲线的对比图。
具体实施方式
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
结合图1,本发明提出一种超视距辐射源直接定位模型的性能分析方法,包括如下步骤:
步骤1、超视距辐射源定位系统的数学建模;
步骤2、入射角参量的费舍尔矩阵计算;
步骤3、辐射源位置参量的克拉美罗界计算。
结合图2,所述步骤1具体为:
为方便表述与理解,现将所用符号统一说明如下:矩阵与矢量以粗斜体符号表示;上标(·)
考虑地球为一半径为r的理想球体,球面上存在单一目标辐射源。定位系统共配置有L个基站,每个基站包含一个具有M个天线单元的均匀线阵。令 代表球坐标系下辐射源的位置,其中上标s代表球坐标系,下标t代表目标,θt代表目标的俯仰角, 代表目标的方位角;nl(k)代表功率为 的加性高斯白噪声矢量,其中k代表第k个快拍,下标n代表噪声;sl(k)代表入射信号,则第l个基站的接收数据可表示为:
其中
表示阵列的导向矢量,d为阵元间距,λ为入射信号波长。对于各基站阵列,规定指向北极点方向为0°方向,阵面相对于0°方向的顺时针偏角由αl表示,令 表示球坐标系下各基站位置,其中上标s代表球坐标系,下标l代表第l个基站,θl代表基站l的俯仰角, 代表基站l的方位角。入射信号与阵面夹角记为ψl,其与 的关系可由下式给出:
其中
u′0,l=PUu0,l u′t,l=PUut,l
PU=U(U
为北极点坐标; 和 分别为直角坐标系下辐射源位置和基站位置坐标,其中上标c代表直角坐标系; 和 为过 的球面切平面xxl+yyl+zzl=r
所述步骤2具体为:
入射角参量ψl的费舍尔矩阵具有如下形式:
F=diag[f1(ψ1) f2(ψ2) … fL(ψL)]
其中
下标s和下标n用以区分信号和噪声,K代表快拍总数,al(ψl)代表以入射角参量为自变量的阵列导向矢量。
所述步骤3具体为:
入射角参量ψl的费舍尔矩阵F与辐射源位置参量的克拉美罗界矩阵C有如下关系:
C=(GFG
其中G代表角度参量与位置参量的转换矩阵,其表达式为:
取C的对角线元素即得到辐射源位置参量的估计误差下限。
图3给出了超视距辐射源定位理论误差下限与最大似然定位算法均方误差曲线的对比,其中ML代表最大似然算法,CRB代表克拉美罗界,SNR代表信噪比。可以看出,按本发明所述方法推得的理论误差下限与定位算法的性能曲线贴合得很好,因此所述方法的有效性得到了验证。
以上对本发明所提供的一种超视距辐射源直接定位模型的性能分析方法,进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
一种超视距辐射源直接定位模型的性能分析方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0