专利摘要
本发明提出了一种电磁矢量嵌套L阵下低复杂度的DOA与极化联合估计方法,将电磁矢量传感器阵列和嵌套L阵结合,首先通过引入空间平滑技术,对嵌套L阵矢量化后得到的连续虚拟面阵进行平滑处理,得到一个具有满秩特性的虚拟接收信号协方差矩阵,对其特征值分解后利用子空间类算法PM算法实现信号DOA与极化信息联合估计,电磁矢量传感器阵列不仅能获得信号的到达角信息,又能获得信号的极化信息,在阵列信号处理领域具有重要的应用价值。本发明提出的方法不需要空间谱搜索,具有较低的算法复杂度,得到的DOA估计角度能实现自动匹配,嵌套阵的应用提供了更大的阵列孔径支撑,而且具有更高的空间自由度和更优的参数估计性能。
权利要求
1.一种电磁矢量嵌套L阵下低复杂度的DOA与极化联合估计方法,其特征在于,包括如下步骤:
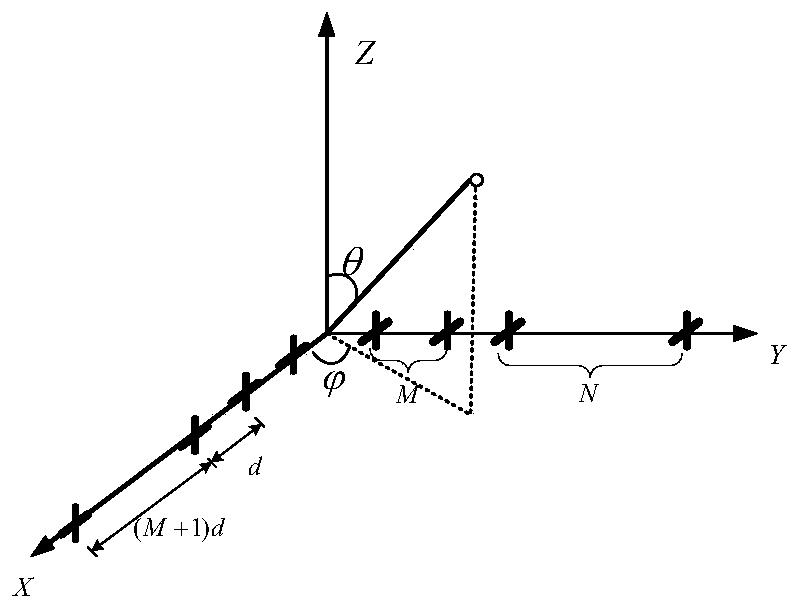
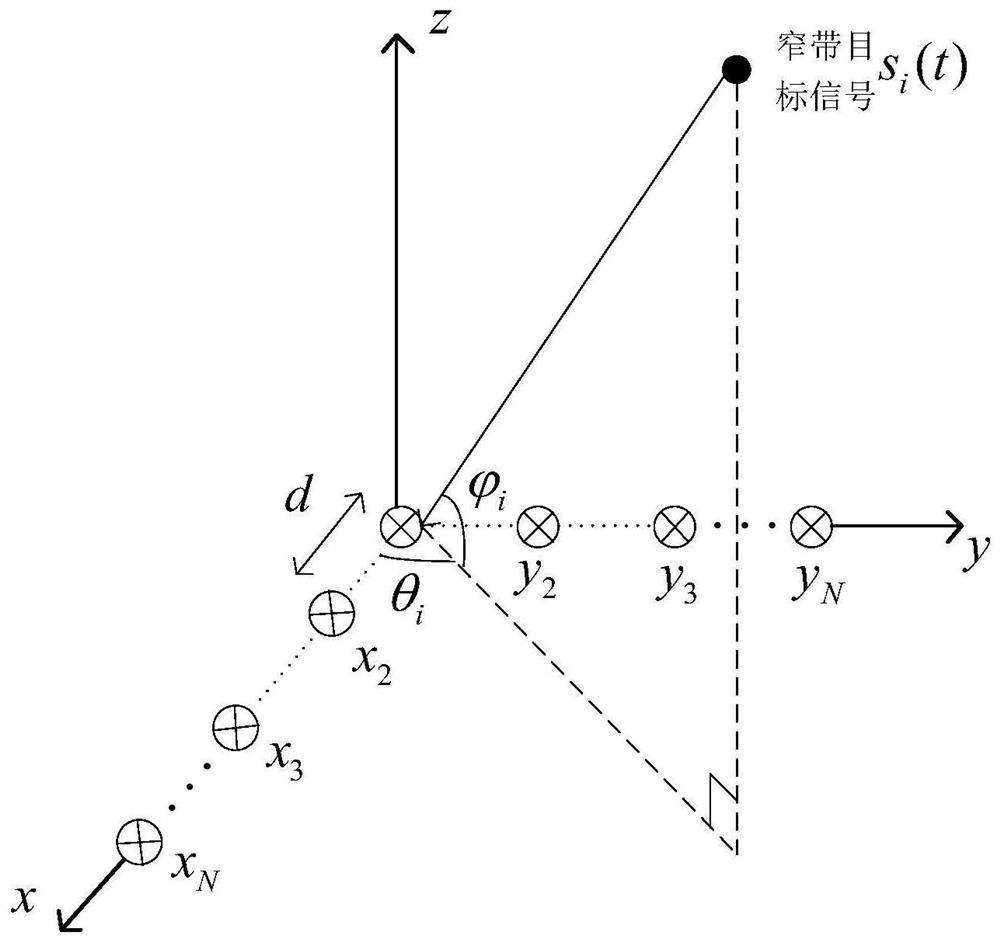
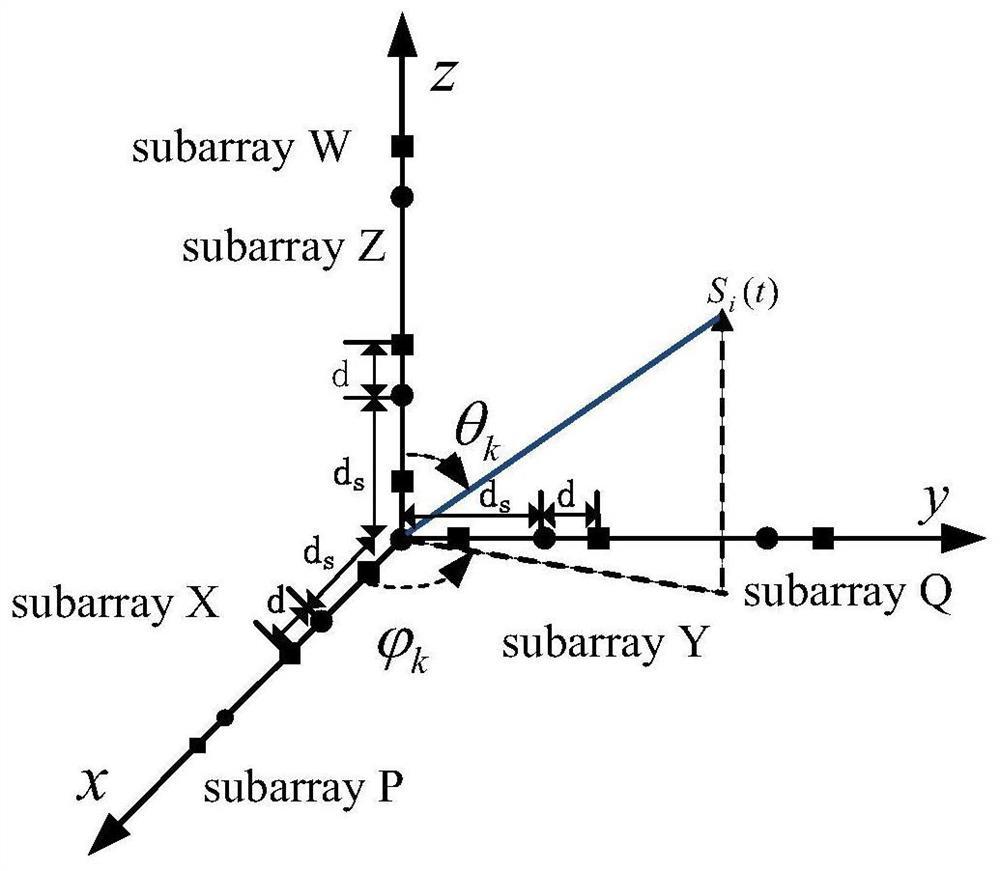
步骤一:矢量化接收信号协方差矩阵R,对矢量化后得到的虚拟信号r进行行变换后得到新的虚拟信号r';假设空间远场有K个不相关的窄带完全极化信号入射到电磁矢量嵌套L阵上,其中电磁矢量传感器阵列是由平行于X轴和平行于Z轴的一对电偶极子组成,X轴和Y轴上都为二级嵌套线阵,一级子阵阵元数为M,阵元间距为d,二级子阵阵元数为N,阵元间距为(M+1)d,其中d=λ/2,λ表示为电磁波波长,
阵列的阵元位置可以用如下集合表示,
Sx={(md,0,0)∪(nd,0,0)|m=1,2,…,Mn=M+1,2(M+1),…,N(M+1)}
Sy={(0,md,0)∪(0,nd,0)|m=1,2,…,Mn=M+1,2(M+1),…,N(M+1)}
第k个信号,k=1,2,…,K,的极化矢量可以表示为,
其中ex和ez分别表示x轴和z轴上的电偶极子矢量,分别为第k个信号源的仰角、方位角、极化辅角和极化相位差,θ∈[0,π],γ∈[0,π/2],η∈[-π,π],假设那么阵列方向矢量可以表示为其中qxk和qyk分别为
所提电磁矢量传感器阵列的导向矢量可以表示为
其中aK为导向矢量,接收信号可以表示为
X(t)=AS(t)+N(t)
其中S(t)=[s1(t),s2(t),…,sK(t)]T为信源矩阵,N(t)为高斯白噪声矩阵,
根据接收信号X(t)可以得出接收信号协防差矩阵为,
R=E{X(t)XH(t)}
=ARsAH+σ2I2(M+N)
其中Rs=diag(σ12,σ22,…,σK2),σk2表示第k个信号的功率,σ2表示噪声功率,不考虑噪声影响下,对接收信号协方差矩阵矢量化可得到
其中P=[σ12,σ22,…,σK2]T,r为一个新的虚拟接收信号,其导向矢量变为A*⊙A,对r行变换后重构可得r'如下:
步骤二:新的虚拟信号r'中包含连续部分与非连续部分,选取连续虚拟面阵部分信号记为通过二维空间平滑技术对虚拟面阵接收信号的各个子阵信号空间平滑,并求得满秩协方差矩阵
步骤三:通过构造传播算子P,将得到的E分成两个部分E1和E2,对E1取伪逆运算得到E1+,对E1+E2进行特征分解可以得到
步骤四:获得虚拟子面阵导向矢量的估计值,对E重构得到E',用E'构造得到部分E'1和E'2,对E'1取伪逆运算得到E'1+,对E'1+E'2进行特征分解可以得到利用获得的和得到方位角和仰角的角度估计值;
步骤五:利用的估计值构造ax,k和az,k,求出极化参数和
2.根据权利要求1所述的一种电磁矢量嵌套L阵下低复杂度的DOA与极化联合估计方法,其特征在于,步骤二具体为:假设那么可以表示为
根据差分阵列的概念,可知可以表示为一个虚拟面阵的方向矢量,此时的虚拟面阵包含连续部分和不连续部分,并且连续部分阵元间距为半波长,
根据上述表达式,虚拟面阵方向矢量分为四个部分,分别为和对应于虚拟阵元位置分别表示为Sxx,Sxy,Syx和Syy,
Sxx={(x,0,0)|x=-N(M+1),…,N(M+1)}
Syy={(0,y,0)|y=-N(M+1),…,N(M+1)}
Sxy={(-x,y,0)|x=y=1,2,…M,(M+1),2(M+1),…,N(M+1)}
Syx={(x,-y,0)|x=y=1,2,…M,(M+1),2(M+1),…,N(M+1)}
Sxx,Sxy中阵元连续且间隔为1,而Syx和Syy只有部分间距为1的连续阵元,选取Sxx,Sxy,Syx和Syy中相接的阵元连续部分,设其阵元位置坐标为S1和S2,S1和S2阵元坐标可以表示为S1={(-x,y,0)|x=y=0,1,…(M+1)},S2={(x,-y,0)|x=y=0,1,…(M+1)},选取连续虚拟面阵S1,设其方向矢量为表示为
根据嵌套阵列理论,虚拟面阵S1的接收信号可从虚拟接收信号r'中选取得到,具体表现为根据虚拟接收信号的阵元位置从r'中选取对应的接收数据,其中可以表示为
S1虚拟面阵大小为(M+2)×(M+2),引入空间平滑技术恢复虚拟接收信号协方差矩阵的满秩特性,假设S1w是S1中的第w个连续子面阵,其大小设为i×i,其中1≤i<M+2,可知S1中共有(M+3-i)2个不同的连续子面阵,也就是说w=1,2,…,(M+3-i)2,假设S1w的虚拟接收信号设为可知是根据S1w中对应的阵元位置从中选取得到的,其协方差矩阵表示为引入二维空间平滑技术得到,
假设其中根据嵌套阵列理论,可知可以重新表示为
从上式可得协防差矩阵满足满秩特性,利用可以将子空间类DOA估计算法应用于其中实现角度与极化的联合估计。
3.根据权利要求1所述的一种电磁矢量嵌套L阵下低复杂度的DOA与极化联合估计方法,其特征在于,步骤三具体为:协方差矩阵可分解为其中根据最小二乘法则,传播算子P的解可以表示为
P=G+H
将分块为其中根据传播算子理论,和的关系可以表示为
其中,(·)H表示矩阵共轭转置,
构造下列关系式
其中,是一个满秩矩阵,构造矩阵E11=E(1:i(i-1),:),E11表示取E的第1到i(i-1)行,同理构造E12=E((i2+1):2i(i-1),:),E13=E((2i2+1):3i(i-1),:),E14=E((3i2+1):4i(i-1),:),将所有值组合为E1=[E11T,E12T,E13T,E14T]T,同理构造矩阵E21=E((i+1):i2,:),E22=E(i2+(i+1):2i2,:),E23=E(2i2+(i+1):3i2,:),E24=E(3i2+(i+1):4i2,:),令E2=[E21T,E22T,E23T,E24T]T,可知E1和E2之间存在关系式
ψy=E1+E2=T-1ΦyT
其中E1+表示对E1取伪逆运算,对ψy特征值分解可得K个特征值λk,k=1,2,…,K,其特征矢量对应于可得为
4.根据权利要求1所述的一种电磁矢量嵌套L阵下低复杂度的DOA与极化联合估计方法,其特征在于,步骤四具体为:获得的估计值为在不考虑噪声情况下,对交换行顺序,可以重构出表示为
构造矩阵同理于E构造得到E1和E2,根据同样的步骤,可以用E'构造得到E1'和E2',可知E1'和E2'之间存在关系式
ψx=E'1+E'2=T-1ΦxT
其中为了实现仰角与方位角的自动匹配,需要保证和Φy具有相同的列模糊,即对应于相同的待估计角度,保证其估计信息位于和Φy中相同的列,那么需通过构造式子获得,从而得知为
其中为的第k个对角元素值,k=1,2,…,K;
通过获得的估计值和方位角和仰角分别表示为
。
5.根据权利要求1所述的一种电磁矢量嵌套L阵下低复杂度的DOA与极化联合估计方法,其特征在于,步骤五具体为:根据获得的的估计值极化参数估计值能够被唯一确定,令ax,k表示的第1到第i2
电磁矢量嵌套L阵下低复杂度的DOA与极化联合估计方法专利购买费用说明

Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。





















动态评分
0.0