








专利摘要
本发明提供了一种轻量化可折展空间桁架式抓捕机械手,包括基座和机械手爪,机械手爪包括多个依次相连的折展单元;每一折展单元均包括上下设置的两个T形桁架,T形桁架包括一根支撑杆和一根连接杆,同一折展单元的两根支撑杆之间相互平行,且两根支撑杆之间通过剪叉式抓捕机构连接;同一折展单元的两根连接杆位于相同的平面内,且两根连接杆之间通过驱动支链连接;抓捕机构包括两根相同的伸缩剪叉杆、两根相同的翻转剪叉杆,两根伸缩剪叉杆的中部相互铰接,形成剪叉机构;驱动支链为直线伸缩式驱动支链。本发明结构简单、重量轻,并可以通过拆除和增加折展单元的数目来控制抓捕机械手爪的长度,以完成空间大质量非合作目标的抓捕任务。
权利要求
1.一种轻量化可折展空间桁架式抓捕机械手,包括基座和设在所述基座上的多个机械手爪,其特征在于:所述机械手爪包括多个依次相连的折展单元;
每一所述折展单元均包括上下设置的两个T形桁架,所述T形桁架包括一根支撑杆和一根连接杆,所述支撑杆包括固定套筒和活动套杆,所述活动套杆可伸缩地设在所述固定套筒的内部;
同一折展单元的两根所述支撑杆之间相互平行,且两根所述支撑杆之间通过剪叉式抓捕机构连接;同一折展单元的两根所述连接杆位于相同的平面内,且两根所述连接杆之间通过驱动支链连接;
所述抓捕机构包括两根相同的伸缩剪叉杆、两根相同的翻转剪叉杆,两根所述伸缩剪叉杆的中部相互铰接,形成剪叉机构;两根所述伸缩剪叉杆的首端分别铰接于其中一根所述支撑杆的固定套筒和活动套杆上,两根所述伸缩剪叉杆的末端分别铰接于两根所述翻转剪叉杆的首端,两根所述翻转剪叉杆的末端分别铰接于另一根所述支撑杆的固定套筒和活动套杆上;
所述驱动支链为直线伸缩式驱动支链,所述驱动支链的首端铰接于其中一根所述连接杆上,所述驱动支链的末端铰接于另一根所述连接杆上;初始状态下,两根所述连接杆之间相互平行,随着所述驱动支链的伸长,两个所述T形桁架之间背向分离,当所述抓捕机构中的两根所述伸缩剪叉杆伸展至预设位置时,所述T形桁架中的同一根所述支撑杆中的活动套杆与固定套筒相抵,此时,其中一根所述连接杆相对另一根所述连接杆转动,进而驱动所述抓捕机构中的两根所述翻转剪叉杆相对两根所述伸缩剪叉杆转动。
2.如权利要求1所述的轻量化可折展空间桁架式抓捕机械手,其特征在于,所述驱动支链包括气缸,所述气缸的缸体铰接于位于下方的所述连接杆上,所述气缸的活塞杆铰接于位于上方的所述连接杆上,且所述气缸与两根所述连接杆之间呈Z形设置。
3.如权利要求2所述的轻量化可折展空间桁架式抓捕机械手,其特征在于,所述驱动支链还包括滑轨和设在所述滑轨上的滑动件,所述气缸的缸体固定设在所述滑轨上,并通过所述滑轨铰接于位于下方的所述连接杆上;所述气缸的活塞杆通过所述滑动件铰接于位于上方的所述连接杆上。
4.如权利要求1所述的轻量化可折展空间桁架式抓捕机械手,其特征在于,相邻的所述折展单元之间共用相同的T形桁架。
5.如权利要求1所述的轻量化可折展空间桁架式抓捕机械手,其特征在于,抓捕状态下,所述抓捕机构关于两根所述连接杆所在平面对称,且所述驱动支链位于两根所述连接杆所在平面内。
6.如权利要求1所述的轻量化可折展空间桁架式抓捕机械手,其特征在于,所述基座包括总装基座和设在所述总装基座上的多个分装基座,多个所述机械手爪分别安装在不同的所述分装基座上。
7.如权利要求6所述的轻量化可折展空间桁架式抓捕机械手,其特征在于,位于最下方的所述T形桁架中的连接杆固定设在所述分装基座上;位于最下方的所述T形桁架中的固定套筒固定设在所述分装基座上,位于最下方的所述T形桁架中的活动套杆上设有滚轮,所述滚轮与所述分装基座接触并沿着活动套杆在固定套筒中的滑动方向滑动设置。
8.如权利要求1所述的轻量化可折展空间桁架式抓捕机械手,其特征在于,多个所述机械手爪呈圆周阵列或相对设置地安装在所述基座上。
说明书
技术领域
本发明属于空间机构操控技术领域,更具体地,涉及一种模块化设计的轻量化可折展空间桁架式抓捕机械手。
背景技术
空间机构操控技术是指在太空有人或无人参与的情况下,利用空间平台对特定的在轨目标进行操作,例如太空垃圾回收、碎片清理、实施空间攻防、大范围空间观测、远距离探测、非合作目标追踪与捕获、辅助变轨、故障维修、组装建造、在轨救援等相关作业的技术。然而现有空间桁架式机构还存在如下问题:空间可展开机构可以构造几十米甚至上百米的大型结构,但因其活动度较少而无法进行在轨操控;变几何桁架机构可以实现较多的活动度,但是其驱动复杂;刚柔混合式机构难以实现复杂的形状控制;模块化航天器可以通过模块的重组获得不同类型结构,但是不具备多样化的可操控活动度,并且重构过程往往需要辅助机器人来实现。
中国专利文献201410056414.6公开了一种可扩展欠驱动索杆桁架式机械手爪,它涉及一种可用于抓取空间中不同形状目标的模块化机械手爪,以解决传统欠驱动机构和SARAH手爪重量大、结构复杂、对抓取的目标物体的形状适应能力差、抓取力小以及SARAH手爪不易扩展的问题,它包括前端连接装置、杆间转角限位机构、末端索杆桁架、绳索、多个定位柱和多个可扩展模块化索杆桁架;所述前端连接装置包括连接板、两个绳索轴、两个限位柱、两个安装板、两个过渡板和四个支撑板,竖直方向上位于同一侧的两个支撑板穿设有绳索轴,电机的输出轴竖向设置且与相对应的绳索轴连接;每个所述可扩展模块化索杆桁架包括两个绕绳轴、十二个摩擦阻尼金属片和六个连接杆。该现有技术中,机械手占用空间体积大,不具有折叠展开的功能,难以控制刚度,驱动采用伺服电机,其控制复杂,结构笨重,需要针对电机的布置进行相应的结构设计,对于空间抓捕机械手来说应做更多的轻量化设计,电机的转动很难提供较大的抓捕力。占用体积大使该发明没有考虑到折叠展开功能,不具有变胞运动,平行四边形结构稳定性差。
基于此,本发明提出了一种既可以进行模块化设计、又具备轻量化优点的可折展空间桁架式抓捕机械手,旨在解决空间大质量非合作目标的抓捕问题。
发明内容
针对现有技术的缺陷,本发明提供了一种轻量化可折展空间桁架式抓捕机械手,其结构简单、重量轻,并可以通过拆除和增加折展单元的数目来控制抓捕机械手爪的长度,以完成空间大质量非合作目标的抓捕任务。
为了实现上述目的,本发明提供了一种轻量化可折展空间桁架式抓捕机械手,包括基座和设在基座上的多个机械手爪,机械手爪包括多个依次相连的折展单元;
其中,每一折展单元均包括上下设置的两个T形桁架,T形桁架包括一根支撑杆和一根连接杆,连接杆垂直于支撑杆设置,支撑杆包括固定套筒和活动套杆,活动套杆可伸缩地设在固定套筒的内部;
同一折展单元的两根支撑杆之间相互平行,且两根支撑杆之间通过剪叉式抓捕机构连接;同一折展单元的两根连接杆位于相同的平面内,且两根连接杆之间通过驱动支链连接;
抓捕机构包括两根相同的伸缩剪叉杆、两根相同的翻转剪叉杆,两根伸缩剪叉杆的中部相互铰接,形成剪叉机构;两根伸缩剪叉杆的首端分别铰接于其中一根支撑杆的固定套筒和活动套杆上,两根伸缩剪叉杆的末端分别铰接于两根翻转剪叉杆的首端,两根翻转剪叉杆的末端分别铰接于另一根支撑杆的固定套筒和活动套杆上;
驱动支链为直线伸缩式驱动支链,驱动支链的首端铰接于其中一根连接杆上,驱动支链的末端铰接于另一根连接杆上;初始状态下,两根连接杆之间相互平行,随着驱动支链的伸长,两个T形桁架之间背向分离,当抓捕机构中的两根伸缩剪叉杆伸展至预设位置时,T形桁架中的同一根支撑杆中的活动套杆与固定套筒相抵,此时,其中一根连接杆相对另一根连接杆转动,进而驱动抓捕机构中的两根翻转剪叉杆相对两根伸缩剪叉杆转动。
在本发明的上述方案中,抓捕机构是基于剪叉机构而形成的抓捕机构,在传统剪叉机构的基础上仅仅改进,其中相互连接的伸缩剪叉杆和翻转剪叉杆之间形成结构尺寸规则的剪叉机构,在剪叉机构的一部分增设转动副,同时在剪叉机构中的两根伸缩剪叉杆伸展至预设位置时,翻转剪叉杆可以进行转动,从而形成使得剪叉机构成为抓捕面。
其中,预设位置是指两根伸缩剪叉杆伸展至极限时的位置,此种状态下,同一根支撑杆中,活动套杆伸入至固定套筒中的距离为最长,伸缩剪叉杆无法继续伸展,与此同时,两根翻转剪叉杆与两根伸缩剪叉杆之间的两个转动副的轴线共线,此位置为抓捕机构的变胞位置,在驱动支链的驱使下,两根翻转剪叉杆相对两根伸缩剪叉杆所在平面进行转动,抓捕机构由伸展状态转变为抓捕状态。
进一步的,在伸缩剪叉杆伸展过程中,整个折展单元同步伸展,上下设置的两个T形桁架相互平行;抓捕机构中的两根伸缩剪叉杆伸展至预设角度位置时,折展单元开始进行抓捕过程,此时位于上方的T形桁架开始围绕翻转剪叉杆与伸缩剪叉杆之间转动副的轴向进行翻转一定的角度,从而完成折展单元的抓捕任务。
具体的,T形桁架具有三个角部,整体也呈三角形结构,三角形式的桁架结构具有较高的刚度,可以提供更大的抓捕力。
其中,优选的,在折叠单元处于抓捕状态时,抓捕机构关于两根连接杆所在平面对称,且驱动支链位于两根连接杆所在平面内。
为了进一步简化机构,使模块更加轻量化,相邻的折展单元之间共用相同的T形桁架。
根据本发明的另一种具体实施方式,驱动支链包括气缸,气缸的缸体铰接于位于下方的连接杆上,气缸的活塞杆铰接于位于上方的连接杆上,且气缸与两根连接杆之间呈Z形设置。
具体的,气缸的缸体铰接于位于下方的连接杆上与接近支撑杆的端部,相应的,气缸的活塞杆铰接于位于上方的连接杆上与远离支撑杆的端部。
本方案中采用气缸作为驱动支链的动力,具有电机驱动方式不具备的优点,气缸驱动方式可以大大简化驱动支链的结构,不用经过力的传递即可完成相应的动作,并且气缸驱动质量更轻,具有较大的抓捕力,控制系统更为简单。
进一步的,驱动支链还包括滑轨和设在滑轨上的滑动件,气缸的缸体固定设在滑轨上,并通过滑轨铰接于位于下方的连接杆上;气缸的活塞杆通过滑动件铰接于位于上方的连接杆上。
为了更进一步提高结构刚度,本方案中的驱动支链(气缸)的位置进行了偏置设置,当折展单元处于收拢状态时,气缸处在偏置位置,即不位于抓捕面的中心位置;当折展完全单元展开或进行抓捕时,气缸处在抓捕面的中心位置,可以有效地防止抓捕过程中产生扭矩。
根据本发明的另一种具体实施方式,根据本发明的另一种具体实施方式,基座包括总装基座和设在总装基座上的多个分装基座,多个机械手爪分别安装在不同的分装基座上。
进一步的,多个分装基座的安装面之间具有夹角。
再进一步的,位于最下方的T形桁架中的连接杆固定设在分装基座上;位于最下方的T形桁架中的固定套筒固定设在分装基座上,位于最下方的T形桁架中的活动套杆上设有滚轮,滚轮与分装基座接触并沿着活动套杆在固定套筒中的滑动方向滑动设置。
本方案中,滚轮的设置可以有效地防止机械手各种状态下活动套杆产生的挠度,增加了滚轮设计,可有效地提供支持力,使运动更为平滑,在折叠的过程中,结构自重也有助于折叠运动的进行。
根据本发明的另一种具体实施方式,机械手爪的数量为2-8个,当然在其他发明中,还可以根据需要抓捕目标物的抓捕情况进行适应性选择,再例如,机械手爪的数量为10个,又例如机械手爪的数目为12个。
根据本发明的另一种具体实施方式,多个机械手爪呈圆周阵列或相对设置地安装在基座上。
本发明中的每个机械手爪均包括多个依次相连的折展单元,每个机械手爪中折展单元的数目例如为4-12个,具体例如为6个,再例如为8个,具体可以根据需要抓捕目标物的抓捕情况进行适应性选择。
本发明中,为了进一步提高结构刚度,T形桁架也可以采用三角框状桁架结构,还可以采用三角板状桁架结构。
本发明中的各个气缸采用单独的阀门进行控制,例如设置节流阀,每个气缸的伸长量(缩回量)通过例如控制器进而节流阀进行控制,实现将各个折展单元调整至合适的状态,以协同完成抓捕任务。
与现有技术相比,本发明的有益之处在于:
本发明采用T形桁架和剪叉式抓捕机构,不仅使得该机械手具备了刚度高、折展性能好、内部空间足等优点,而且机械手爪具有较好的灵活性和良好的抓捕性能,特别适用于空间非合作目标的抓取。
本发明轻量化设计,驱动支链采用气缸的方式,大大降低了机构的自重,对于空间机械手而言,这具有重要的实践意义,相比复杂的伺服电机驱动系统,气动系统的复杂度大为降低,形式简单,仅仅通过给气缸便可产生足够的驱动力,同时气缸作为一个构件不再需要单独为其进行结构设计,降低了结构设计的难度,相比电机驱动需要复杂的型腔设计及扭矩驱动,气缸直接作为机械手的一个构件通过伸缩(即移动副)驱动可提供更大的抓捕力,驱动过程更加稳定;并且每个折展单元都只有一个自由度,即安装一只气缸,即可完成抓捕机构的折展和抓捕两个动作。
下面结合附图对本发明作进一步的详细说明。
附图说明
图1是本发明空间桁架式抓捕机械手实施例1的整体结构示意图;
图2是图1的伸展状态的示意图;
图3是本发明空间桁架式抓捕机械手实施例1的抓捕球形目标物体的状态示意图;
图4是本发明空间桁架式抓捕机械手实施例1的抓捕长方体目标物体的状态示意图;
图5是本发明空间桁架式抓捕机械手实施例1的折展单元的结构示意图;
图6是图5中抓捕机构伸展状态的示意图;
图7是图5中抓捕机构抓捕状态的示意图;
图8是图5中驱动支链的示意图;
图9是本发明空间桁架式抓捕机械手实施例1的结构示意图,其显示了单个折展单元;
图10是图9抓捕状态的示意图。
具体实施方式
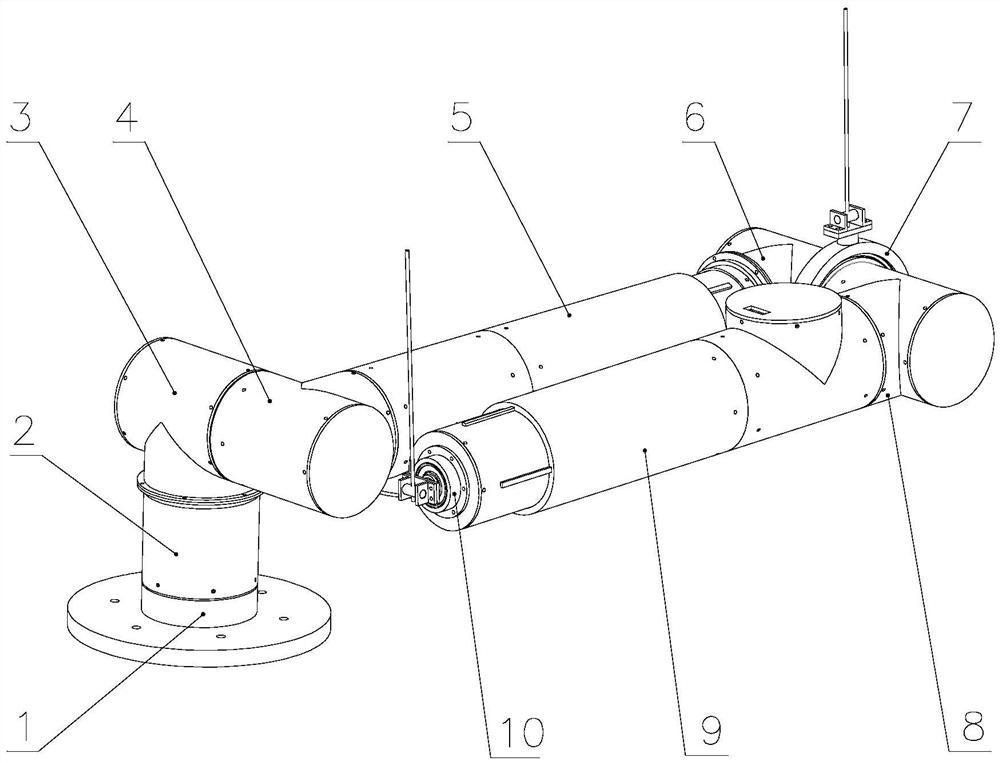
本实施例提供了一种轻量化可折展空间桁架式抓捕机械手,如图1-8所示,其包括基座1和两个相同的机械手爪2,其中,基座1包括总装基座11和设在总装基座11上的两个分装基座12,两个机械手爪2分别安装在两个分装基座12上;具体的,两个机械手爪2对向设置。
如图1所示,其显示了两个机械手爪2收拢的状态,再如图2所示,其显示了两个机械手爪2伸展的状态;为了适合不同的非合作目标的抓取,两个分装基座12的安装面还可以具有夹角,例如夹角为90度。
参见图3,其显示了本实施例的两个机械手爪2协同抓捕球形目标物体的状态;参见图4,其显示了本实施例的两个机械手爪2协同抓捕长方体目标物体的状态;相应的,在本发明的其它示例中,还可以适用于其它形状物体的抓捕过程。
本实施例中机械手在抓捕过程中,在每个折展单元接触到目标后,下一个折展单元即可进行适应性抓捕过程,可以迅速抓住物体;相应的,多个机械手爪可以并联呈大型多关节空间机械手,其数量越多,自适应性越强,在组合成大型机械手时,作业过程的选择多样性也越强。
本实施例中的械手爪2包括若多个依次相连的折展单元3,具体例如包括2-8个依次相连的折展单元3;优选的,本实施例中显示了五个折展单元3组成的机械手爪2。
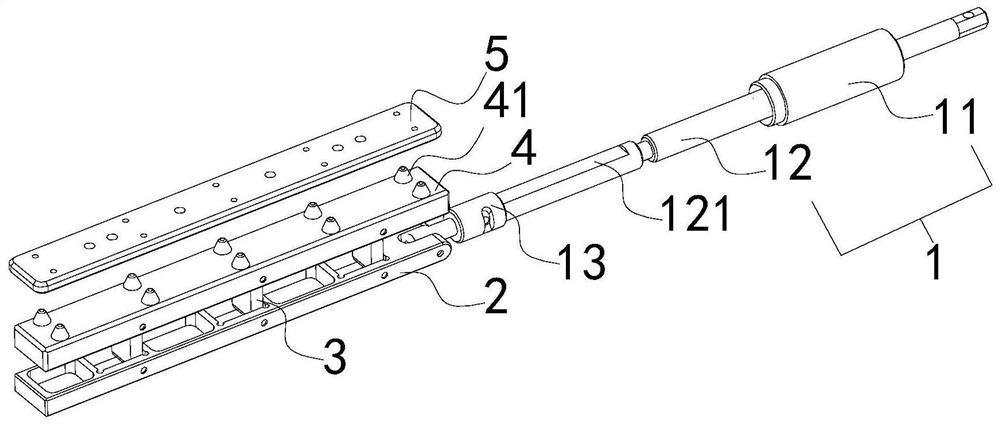
具体的,以图2中的一个折展单元3为例进行结构说明,参见图5-8,折展单元3包括上下设置的两个T形桁架,分别为顶部桁架31和底部桁架32。
顶部桁架31包括顶部支撑杆311和顶部连接杆312,顶部连接杆312垂直顶部支撑杆311设置,进一步的,顶部支撑杆311包括第一固定套筒3111和第一活动套杆3112,第一活动套杆3112的一端可滑动伸缩的设在第一固定套筒3111的内部。
底部桁架32包括底部支撑杆321和底部连接杆322,底部连接杆322垂直底部支撑杆321设置,进一步的,底部支撑杆321包括第二固定套筒3211和第二活动套杆3212,第二活动套杆3212的一端可滑动伸缩的设在第二固定套筒3211的内部。
其中,底部支撑杆321和顶部支撑杆311之间相互平行,二者之间通过剪叉式抓捕机构33连接;底部连接杆322和顶部连接杆312之间位于相同的平面内,二者之间通过气缸驱动支链34连接。
参见图6,抓捕机构33包括两根相同的伸缩剪叉杆331、两根相同的翻转剪叉杆332,两根伸缩剪叉杆331的中部铰接于转动副R1,形成剪叉机构;两根伸缩剪叉杆331的首端分别铰接于第二固定套筒3211与第二活动套杆3212上,两根伸缩剪叉杆331的末端分别铰接于两根翻转剪叉杆332的首端,两根翻转剪叉杆332的末端分别铰接于第一固定套筒3111和第二活动套杆3112上。
进一步的,当两根伸缩剪叉杆331之间相互垂直时,此时,两根翻转剪叉杆332与顶部支撑杆311之间的夹角为45度,两根翻转剪叉杆332与两根伸缩剪叉杆331之间的两个转动副R2的轴线共线,两根翻转剪叉杆332具有翻转功能;与此同时,第一活动套杆3112的端部与第一固定套筒3111相抵(即伸入至最大距离),第二活动套杆3212的端部与第一固定套筒3111相抵(即伸入至最大距离),两根伸缩剪叉杆331无法继续进行伸展,从而完成抓捕机构33从伸展状态到抓捕状态的转变。
参见图7,本实施例中的驱动支链34采用气缸的方式,具体的,气缸的缸体341铰接于底部连接杆322上且位于靠近底部支撑杆321的端部,相应的,气缸的活塞杆342铰接于顶部连接杆312上且位于远离顶部支撑杆311的端部。
参见图5,初始状态下,顶部支撑杆311与底部支撑杆321之间相互平行,随着驱动支链34的伸长,两个T形桁架之间背向分离,当抓捕机构33中的两根伸缩剪叉杆331伸展至预设位置,即两根翻转剪叉杆332与两根伸缩剪叉杆331之间的两个转动副R2的轴线共线时,即如图6所示的状态,此时,顶部支撑杆311中的第一活动套杆3112与第一固定套筒3111的端部相抵,即达到最大伸入极限;底部支撑杆321中的第二活动套杆3212也与第二固定套筒3211的端部相抵,也达到最大伸入极限,此时,伸缩剪叉杆331无法继续伸缩,但两根翻转剪叉杆332可以进行翻转,进一步的,气缸驱动支链34驱动顶部支撑杆311相对底部支撑杆321进行转动,进而驱使两根翻转剪叉杆332进行翻转,进而形成如图7所示的抓捕状态。
为了进一步提高整体结构的刚度,本实施例中的气缸的位置还可以进行偏置设置,当折展单元3处于收拢状态时,气缸处在偏置位置,具体可以参见图1中气缸的位置,此时气缸不位于抓捕面的中心位置;当折展单元完全展开或进行抓捕时,气缸处在抓捕面的中心位置,具体参见图7或图8,可以有效地防止抓捕过程中产生扭矩。
再次参见图1、图2,为了进一步简化机构,使模块更加轻量化,本实施例的机械手爪2中,相邻的折展单元3之间共用相同的T形桁架。
在本发明的其它示例中,直接设在分装基座12上的底部桁架通过例如螺栓的方式进行固定,优选的,该底部桁架中的活动套杆上还可以设有滚轮,滚轮的一种安装位置参见图7中位置A,滚轮与分装基座接触,并沿着活动套杆在固定套筒中的滑动方向滑动设置,增加了滚轮设计,可有效地提供支持力,使运动更为平滑,在折叠的过程中,结构自重也有助于折叠运动的进行。
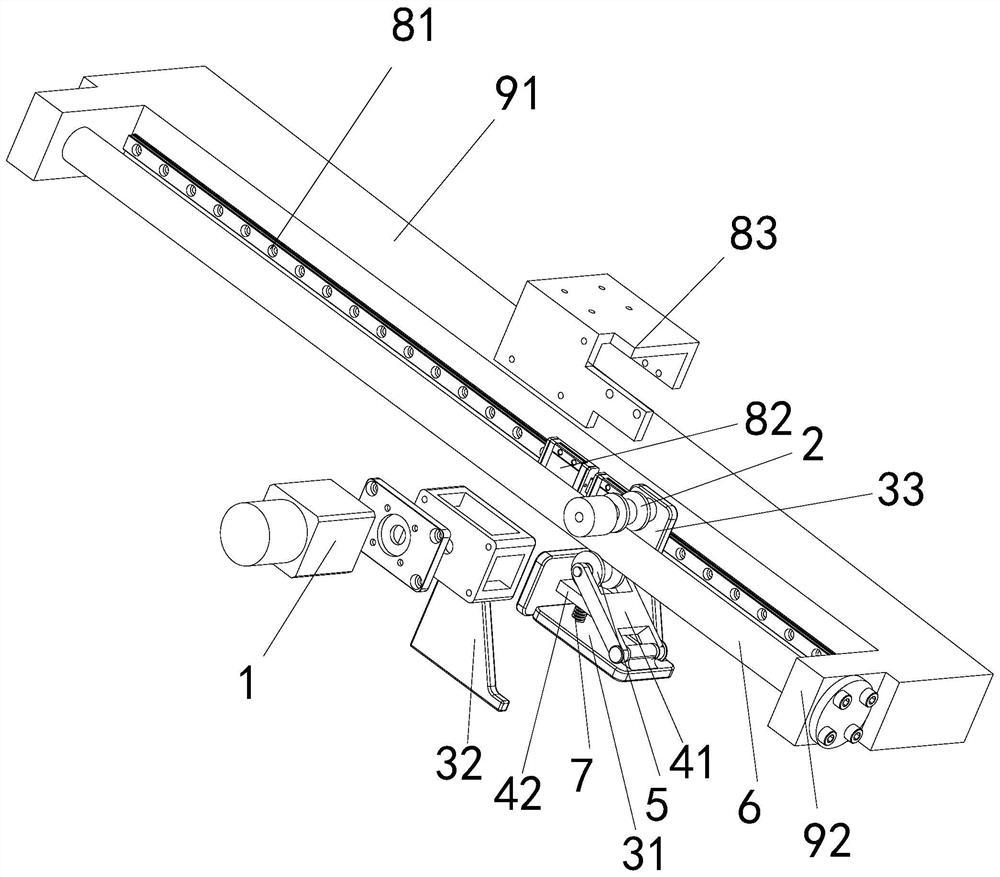
本实施例提供了一种轻量化可折展空间桁架式抓捕机械手,如图9-10所示,本实施例与实施例1的区别在于,折展单元3的变胞位置不同,参见图9,两根翻转剪叉杆332与两根伸缩剪叉杆331之间的两个转动副R2的轴线共线时,两根伸缩剪叉杆331之间的夹角为120度,两根翻转剪叉杆332与顶部支撑杆311之间的夹角30度,此时两根翻转剪叉杆332具有翻转功能。
进一步的,本实施例中的T形桁架采用三角板状桁架。
本实施例中,驱动支链34还可以包括滑轨343和设在滑轨343上的滑动件344,气缸(图中未显示)的缸体固定设在滑轨343上,并通过滑轨343铰接于位于底部支撑杆321上;气缸的活塞杆与滑动件344相对固定,并通过滑动件344铰接于顶部支撑杆311上;随着气缸的伸出或者收回,完成折展单元各个状态(收拢、伸展、抓捕)之间的切换。
虽然本发明以较佳实施例揭露如上,但并非用以限定本发明实施的范围。任何本领域的普通技术人员,在不脱离本发明的发明范围内,当可作些许改进,即凡是依照本发明所做的同等改进,应为本发明的范围所涵盖。
一种轻量化可折展空间桁架式抓捕机械手专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0