






专利摘要
本发明提出了一种基于波形匹配的时间同步系统及方法,本发明利用一组含参考时间的数据,通过相关性原理,为一组不含时间标或含错误时间标的数据同步精确的时间信息。本发明首先将待匹配数据进行分段,各段分别与参考数据的不同的子段进行相关性求解,相关系数最大时,计算此段数据与参考数据之间的时间差,从而得到所有段的时间差序列;然后以时间差序列为观测值,时间差及时标漂移因子为待估参数,最小二乘平差,求解出待估参数;最后,利用时间差和时标漂移因子,为待匹配数据同步精确时间。本发明可广泛应用于多传感器数据融合时的时间同步,还可应用于检测利用其他方法进行时间同步的正确性。
权利要求
1.一种基于波形匹配的时间同步方法,其特征在于,包括如下步骤:
步骤1:读取参考数据R0及待匹配数据T0;
步骤2:统一参考数据R0及待匹配数据T0的数据处理格式,提取出转换后的参考数据R1及待匹配数据T1;
步骤3:分别对R1和T1降采样,对降采样后的参考数据R2及待匹配数据T2进行互相关序列求解,取互相关序列最大值时对应的间隔,求出此时的粗时间差int_bias;
步骤4:根据求得的粗时间差int_bias,使参考数据R2的时间段覆盖待匹配数据T2的时间段,且前后各超出待匹配数据T2一定长度,截取参考数据R2及待匹配数据T2,进入步骤5;
步骤5:统一R2和T2采样率,得到相同采样率的参考数据R3和待匹配数据T3;
步骤6:求得R3和T3的最优时间差bias及时标漂移因子k;
步骤7:根据最佳bias及k组合,更新待匹配数据T0时间,并存储;
步骤8:结束。
2.根据权利要求1所述的一种基于波形匹配的时间同步方法,其特征在于:所述的步骤2中统一参考数据R0及待匹配数据T0的数据处理格式的公式如下:
v=Δs/Δts
其中,Δs为前后两个采样之间陀螺或加速度计所测量的增量值,Δts为前后两个采样之间的时间间隔,v为Δs对应的速率值;
所述的转换后参考数据R1及待匹配数据T1是以转换后的时间列及进行波形匹配的一轴数据组成。
3.根据权利要求1所述的一种基于波形匹配的时间同步方法,其特征在于:所述的步骤3中包括如下步骤:
步骤3.1:分别对R1和T1降采样,得到降采样后的参考数据R2及待匹配数据T2;
步骤3.2:对降采样后R2和T2之中较短的序列后补零,直到两者长度相等;
步骤3.3:计算R2与T2的互相关序列;互相关序列计算公式如下:
其中,x和y为进行相关性处理的序列,x和y长度均为N,K和m分别用于表示序列x和y中的值的序数,m取值为-(N-1)到+(N-1);
步骤3.4:取互相关序列 最大值m时对应的间隔,求出此时的粗时间差int_bias,则粗时间差可利用下式求得:
int_bias=R2(t0)-T2(t0)-T2_interval×m
其中,R2(t0)为R2开始时间,T2(t0)为T2开始时间,T2_interval为错开的间隔所代表的时间长度,为T2的采样间隔,则T2_interval×m为两列数据错开的时间。
4.根据权利要求1所述的一种基于波形匹配的时间同步方法,其特征在于:所述的步骤6.15中,包括如下子步骤:
步骤6.1:计算亚采样间隔时间T_inter;
步骤6.2:以T_inter为倍数因子,计算待匹配数据向右平移距离的δs;
步骤6.3:判断δs是否为采样间隔的正整数倍;若是,转到步骤S6.15,若不是,转到步骤S6.4;
步骤6.4:将待匹配数据数据T3平移δs得到T4;
步骤6.5:以Δt为窗口长度,将T4分为有限n段,取当前段数据T4(i),1≤i≤n;
步骤6.6:判断待匹配数据是否提取到第n段;若是,转到步骤S6.13;若不是,转到步骤S6.7;
步骤6.7:设定滑动窗口W1,窗长为Δt,起始点为当前段开始时刻;
步骤6.8:判断窗口滑动距离是否大于设定长度σs;如若是,转到步骤S6.11;
否则,以W1为窗口,取参考数据R3(W1);
步骤6.9:计算T4(i)与R3(W1)之间的皮尔森相关系数;皮尔森相关系数计算如下式:
其中 为x序列均值, 为y序列均值,N为序列x和y的长度,r为序列x和y之间的皮尔森相关系数;
步骤6.10:判断参考数据是否读到最后一位,若是,转到步骤S6.11;否则,
将窗口W1向后滑动一个参考数据的采样间隔后,转到步骤S6.8;
步骤6.11:计算此段时间差Bias(i)及对应的时间time(i);
步骤6.12:提取下一段待匹配数据。取下一段T4(i),转到步骤6.6;
步骤6.13:用最小二乘平差求时间差bias及时标漂移因子k;以bias及k作为待估参数,Bias(i)为观测值,观测方程如下:
Bias(i)=k×[time(i)-t0]+bias
其中bias的初值Bias0为Bias(i)序列中值,对应的时间即为t0,k的初值为0;
步骤6.14:判断δs是否大于一个采样间隔,若是,则转到步骤S6.15;否则,将δs增加一倍T_inter,转到步骤S6.3;
步骤6.15:选择最佳bias及k组合;利用不同组bias及k,得到不同时间同步后的待匹配数据。
5.根据权利要求4所述的一种基于波形匹配的时间同步方法,其特征在于:所述的步骤6.15中,若数据为单轴,则选择协方差最大时的那组bias和k作为最佳bias和k组合;若数据为多轴,选择最可信的一轴数据进行协方差求解,选择最佳bias和k组合。
6.根据权利要求1所述的一种基于波形匹配的时间同步方法,其特征在于:所述的步骤7中利用下式计算更新T0时间:
t′=(t-t0)×k+bias+t
其中,t为T0的时间列,t0为步骤6.12中选择的时间差初值对应的时间,k为时标漂移因子,bias为时间差,t′为t更新后时间。
7.一种基于波形匹配的时间同步系统,其特征在于,包括如下模块:
读取模块:用于读取参考数据R0及待匹配数据T0;
数据处理格式模块:用于统一参考数据R0及待匹配数据T0的数据处理格式,提取出转换后的参考数据R1及待匹配数据T1;
降采样模块:用于分别对R1和T1降采样,对降采样后的参考数据R2及待匹配数据T2进行互相关序列求解,取互相关序列最大值时对应的间隔,求出此时的粗时间差int_bias;
截取模块:用于根据求得的粗时间差int_bias,使参考数据R2的时间段覆盖待匹配数据T2的时间段,且前后各超出待匹配数据T2一定长度,截取参考数据R2及待匹配数据T2;
采样率计算模块:用于统一R2和T2采样率,得到相同采样率的参考数据R3和待匹配数据T3;
计算模块:用于求得R3和T3的最优时间差bias及时标漂移因子k;
更新模块:用于根据最佳bias及k组合,更新待匹配数据T0时间,并存储。
说明书
技术领域
本发明涉及传感器应用领域,具体的为一种基于波形匹配的时间同步方法及系统。
背景技术
目前,多传感器数据融合技术研究方兴未艾,有些成熟的技术已经应用到了实际工程中,并取得了较好的效果。多传感器数据融合技术的应用不仅可以提高系统的精度和可靠性,还可以提高系统的测量范围,增加系统的可信度,缩短系统的反应时间。但多传感器数据融合是一个复杂的不确定信息处理过程,能够进行融合的前提条件是从每个传感器得到的信息是必须是对同一目标的同一时刻的描述。这包括两个方面,首先要保证每个传感器得到的信息是对同一目标的同一参量进行的描述。其次,要保证进行融合的数据的时间信息是同步的。在动态工作环境中,时间同步问题表现的尤为突出。
在不同的工程实践中,出现了针对具体问题的时间同步方法。例如,利用曲线拟合的方法进行时间同步的算法,利用序列的方法来解决时变观测的时间同步算法,和采用平滑滤波算法,将各传感器之间的测量数据对应的时间同步等方法。这些算法应用前,各传感器均在开始测量时打上相同时标,之后根据各自采样率进行计时。然而,对于整个测量过程,各传感器均不存在相同时标,或者本身进行计时的处理器因温度特性等因素的影响而发生频标漂移的现象,以上算法均不能正确实现多传感器之间的时间同步。
多传感器数据融合比较典型的例子就是GPS(Global Positioning System,全球定位系统)与INS(Inertial Navigation System,惯性导航系统)组成的组合导航系统。其中GPS搭载有较高精度的原子钟为其提供精确的时间,而INS只能通过设定的频率进行计数器计时,且INS频标经常发生漂移现象。GPS/INS组合导航系统通常采用卡尔曼滤波进行数据融合,只有GPS及INS子系统数据在同一时间点上时,组合导航才具有实际的意义。目前最通用、有效的作法是利用GPS秒脉冲信号作为组合导航系统的时间同步基准,一体化结构设计实现时间同步。然而,当一款新出的IMU(Inertial Measurement Unit,惯性测量单元)需进行组合导航测试时,上述方法虽精度高,但复杂度高,成本大,需软硬件支持,不适用。在实际测试过程中,常搭载一组较高精度的组合导航系统作为参考系统,其中的INS已打上高精度的GPS时标。
组合导航系统中的INS时标可作为参考时间系统,只需设计适当的算法,即可实现待测试IMU与参考系统之间的时间同步,这种算法不仅适用于惯性传感器之间的时间同步,还可应用于其他具有参考时标的传感器间的时间同步。
发明内容
本发明针对上述问题,设计了一种基于波形匹配的时间同步方法及系统;此方法及系统对不同传感器数据原有的时间系统是否相同没有限制,并且操作简单、运算快速,成本低;
本发明的技术方案是:一种基于波形匹配的时间同步方法,包括如下步骤:
步骤1:读取参考数据R0及待匹配数据T0;
步骤2:统一参考数据R0及待匹配数据T0的数据处理格式,提取出转换后的参考数据R1及待匹配数据T1;
步骤3:分别对R1和T1降采样,对降采样后的参考数据R2及待匹配数据T2进行互相关序列求解,取互相关序列最大值时对应的间隔,求出此时的粗时间差int_bias;
步骤4:根据求得的粗时间差int_bias,使参考数据R2的时间段覆盖待匹配数据T2的时间段,且前后各超出待匹配数据T2一定长度,截取参考数据R2及待匹配数据T2;进入步骤5;
步骤5:统一R2和T2采样率,得到相同采样率的参考数据R3和待匹配数据T3;
步骤6:求得R3和T3的最优时间差bias及时标漂移因子k。
步骤7:根据最佳bias及k组合,更新待匹配数据T0时间,并存储;
步骤8:结束。
所述的步骤2中统一参考数据R0及待匹配数据T0的数据处理格式的公式如下:
v=Δs/Δts
其中,Δs为前后两个采样之间陀螺或加速度计所测量的增量值,Δts为前后两个采样之间的时间间隔,v为Δs对应的速率值;
所述的转换后参考数据R1及待匹配数据T1是以转换后的时间列及进行波形匹配的一轴数据组成;
所述的步骤3中包括如下步骤:
步骤3.1:分别对R1和T1降采样,得到降采样后的参考数据R2及待匹配数据T2;
步骤3.2:对降采样后R2和T2之中较短的序列后补零,直到两者长度相等;
步骤3.3:计算R2与T2的互相关序列;互相关序列计算公式如下:
其中,x和y为进行相关性处理的序列,x和y长度均为N,K和m分别用于表示序列x和y中的值的序数,m取值为-(N-1)到+(N-1);
步骤3.4:取互相关序列 最大值m时对应的间隔,求出此时的粗时间差int_bias,则粗时间差可利用下式求得:
int_bias=R2(t0)-T2(t0)-T2_interval×m
其中,R2(t0)为R2开始时间,T2(t0)为T2开始时间,T2_interval为错开的间隔所代表的时间长度,为T2的采样间隔,则T2_interval×m为两列数据错开的时间;
所述的步骤6.15中,包括如下子步骤:
步骤6.1:计算亚采样间隔时间T_inter;
步骤6.2:以T_inter为倍数因子,计算待匹配数据向右平移距离的δs;
步骤6.3:判断δs是否为采样间隔的正整数倍;若是,转到步骤S6.15,若不是,转到步骤S6.4;
步骤6.4:将待匹配数据数据T3平移δs得到T4;
步骤6.5:以Δt为窗口长度,将T4分为有限n段,取当前段数据T4(i),1≤i≤n;
步骤6.6:判断待匹配数据是否提取到第n段;若是,转到步骤S6.13;若不是,转到步骤S6.7;
步骤6.7:设定滑动窗口W1,窗长为Δt,起始点为当前段开始时刻;
步骤6.8:判断窗口滑动距离是否大于设定长度σs;如若是,转到步骤S6.11;否则,以W1为窗口,取参考数据R3(W1);
步骤6.9:计算T4(i)与R3(W1)之间的皮尔森相关系数;皮尔森相关系数计算如下式:
其中 为x序列均值, 为y序列均值,N为序列x和y的长度,r为序列x和y之间的皮尔森相关系数;
步骤6.10:判断参考数据是否读到最后一位,若是,转到步骤S6.11;否则,将窗口W1向后滑动一个参考数据的采样间隔后,转到步骤S6.8;
步骤6.11:计算此段时间差Bias(i)及对应的时间time(i);
步骤6.12:提取下一段待匹配数据。取下一段T4(i),转到步骤6.6;
步骤6.13:用最小二乘平差求时间差bias及时标漂移因子k;以bias及k作为待估参数,Bias(i)为观测值,观测方程如下:
Bias(i)=k×[time(i)-t0]+bias
其中bias的初值Bias0为Bias(i)序列中值,对应的时间即为t0,k的初值为0;
步骤6.14:判断δs是否大于一个采样间隔,若是,则转到步骤S6.15;否则,将δs增加一倍T_inter,转到步骤S6.3;
步骤6.15:选择最佳bias及k组合;利用不同组bias及k,得到不同时间同步后的待匹配数据;
所述的步骤6.15中,若数据为单轴,则选择协方差最大时的那组bias和k作为最佳bias和k组合;若数据为多轴,选择最可信的一轴数据进行协方差求解,选择最佳bias和k组合。
所述的步骤7中利用下式计算更新T0时间:
t′=(t-t0)×k+bias+t
其中,t为T0的时间列,t0为步骤6.12中选择的时间差初值对应的时间,k为时标漂移因子,bias为时间差,t′为t更新后时间。
一种基于波形匹配的时间同步系统,其特征在于,包括如下模块:
读取模块:用于读取参考数据R0及待匹配数据T0;
数据处理格式模块:用于统一参考数据R0及待匹配数据T0的数据处理格式,提取出转换后的参考数据R1及待匹配数据T1;
降采样模块:用于分别对R1和T1降采样,对降采样后的参考数据R2及待匹配数据T2进行互相关序列求解,取互相关序列最大值时对应的间隔,求出此时的粗时间差int_bias;
粗时间差模块:用于根据求得的粗时间差int_bias,使参考数据R2的时间段覆盖待匹配数据T2的时间段,且前后各超出待匹配数据T2一定长度,截取参考数据R2及待匹配数据T2;
采样率计算模块:用于统一R2和T2采样率,得到相同采样率的参考数据R3和待匹配数据T3;
计算模块:用于求得R3和T3的最优时间差bias及时标漂移因子k;
更新模块:用于根据最佳bias及k组合,更新待匹配数据T0时间,并存储。
附图说明
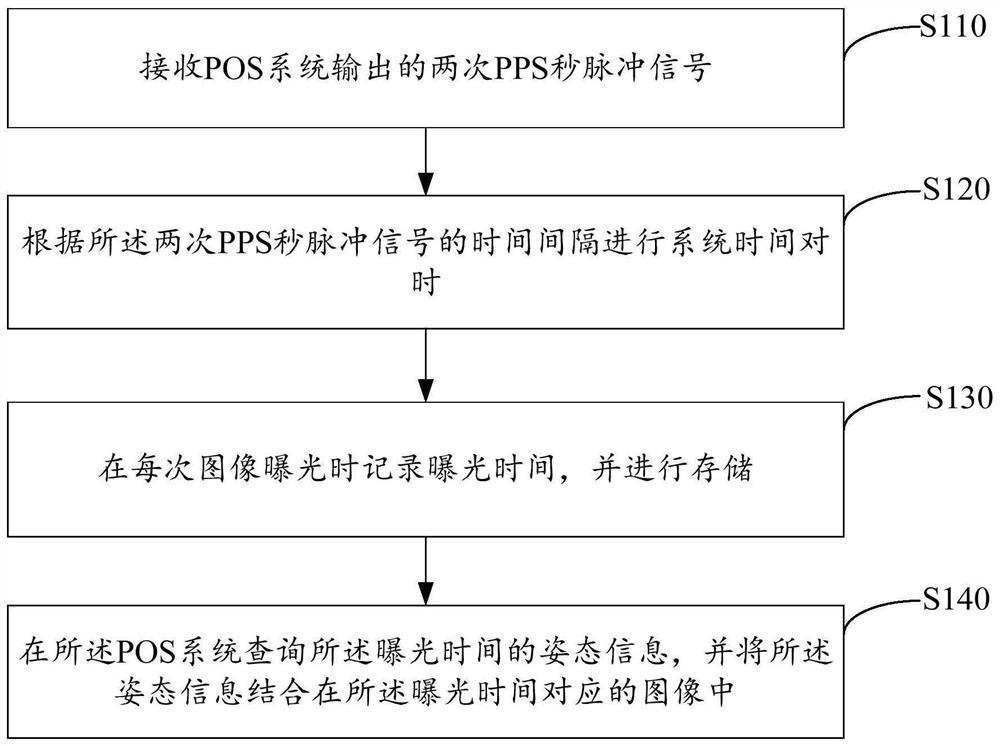
图1是本发明的流程示意图;
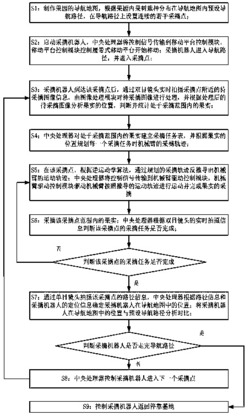
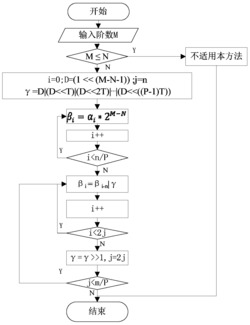
图2是本发明步骤6的流程示意图;
图3-1是EPSON陀螺垂向方向角速率波形示意图;
图3-2是FSAS陀螺垂向方向角速率波形示意图;
图4-1是EPSON陀螺三个轴分段求得的最大相关系数示意图;
图4-2是EPSON加速度计三个轴分段求得的最大相关系数示意图;
图5-1是EPSON陀螺三个轴分段求解出的时标差序列示意图;
图5-2是EPSON加速度计三个轴分段求解出的时标差序列示意图;
图6是陀螺垂向方向时间匹配结果示意图;
图7是陀螺垂向方向时间匹配结果局部示意图;
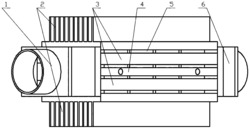
图8是本发明的系统结构示意图。
具体实施方式
下面结合附图及实施例,对本发明作进一步详细的描述。
实施例以惯性传感器采集的数据进行说明,惯性传感器可采集多轴数据,本实施例即以多轴数据处理为例。
实施例中数据来源:在车载测试时,同时搭载低精度IMU EPSON与含高精度IMU FSAS的GPS/INS组合导航系统,其中EPSON采集到的数据中以计数器计时,组合导航系统中FSAS经过与GPS一体化设计,已经被打上精确的GPS时间。
实施例中数据格式:EPSON采样率为125Hz,数据含7列,其中第一列为时间列,第2~4列为陀螺仪采集的三列角速率,分别为前向、右向和垂向,第5~7列为加速度计采集的三列加速度,分别为前向、右向和垂向;FSAS采样率为200Hz,第一列为时间列,第2~4列为陀螺仪采集的三列角速度增量,分别为前向、右向和垂向,第5~7列为加速度计采集的三列加速度增量,分别为前向、右向和垂向。
本发明可为无时间标或时间标不准的数据同步精确的时间信息。其实现步骤如图1所示,图2为图1中最优时间差及时标漂移因子求解步骤。
S1:读取参考数据R0及待匹配数据T0。其中FSAS数据作为参考数据R0,EPSON数据作为待匹配数据T0。
S2:统一参考数据R0及待匹配数据T0的数据处理格式,提取出转换后的参考数据R1及待匹配数据T1(有用数据列);根据已有先验信息,判断R0与T0所表示的参量是否相同。若不同,则根据参量间的相互关系进行转换,最终以常用数据格式为准。此例中,EPSON为速率形式,而FSAS为增量格式,常用的数据处理格式为速率格式。增量转换为速率的公式如下:
v=Δs/Δts
其中,Δs为前后两个采样之间陀螺或加速度计所测量的增量值,Δts为前后两个采样之间的时间间隔,v为Δs对应的速率值。
利用上式对R0进行转换,相应的时间为前后两个采样时间的均值。若以其中一轴数据进行波形匹配,则提取出转换后的时间列及当轴数据组成新的参考数据R1。此例中,对6个轴的数据均进行波形匹配,最终FSAS数据R1为R0转化后数据,EPSON数据T1为T0。
如图3-1和图3-2所示为R1与T1第4列垂向陀螺数据波形,从图中可看出,两波形具有高度一致性,其他轴也有相同特征,这样即可根据两数据的相关系数来进行波形匹配。
S3:对R1和T1降采样,对降采样后的参考数据R2及待匹配数据T2进行互相关序列求解,取互相关序列最大值时对应的间隔,求出此时的粗时间差int_bias;
首先,对待匹配数据及参考数据进行降采样处理,降采样后频率为两组数据原始频率的公因数,在满足粗时间差精度的基础上,越小越好。实施例中将R1和T1降采样为5Hz,对降采样后FSAS数据R2及EPSON数据T2进行互相关序列求解,取互相关序列最大值时对应的间隔,求出此时的粗时间差int_bias。具体步骤如下:
S3.1:对R1和T1降采样,得到降采样后的参考数据R2及待匹配数据T2;
S3.2:在R2和T2较短的序列后补零直到两者长度相等;
S3.3:计算R2与T2的互相关序列。互相关序列计算一般原理公式如下:
其中x和y为进行相关性处理的序列,x和y长度均为N,下标K和m用于表示序列x和y中的值的序数,m取值为-(N-1)到+(N-1)。 为互相关序列, 为m小于零时,利用m大于零的公式计算出来的互相关序列。当m取-(N-1)到+(N-1)中不同的值时,都可利用上式计算求得一个互相关值 最终,得到矢量长度为2×N-1的互相关函数序列值。
步骤3.4:取互相关序列 最大值m时对应的间隔,求出此时的粗时间差int_bias,本例中,经末尾补零长度相等后的R2与T2的第四列即为需进行相关性处理的序列x和y,利用上式计算求得互相关序列值 值最大时对应的m,即为两列数据相关性最大时,错开的间隔。则粗时间差可利用下式求得:
int_bias=R2(t0)-T2(t0)-T2_interval×m
R2(t0)为R2开始时间,T2(t0)为T2开始时间,T2_interval为错开的间隔所代表的时间长度,此例中为T2的采样间隔,则T2_interval×m为两列数据错开的时间。
S4:根据求得的粗时间差int_bias,使参考数据R2的时间段覆盖待匹配数据T2的时间段,且前后各超出待匹配数据T2一定长度,截取参考数据R2及待匹配数据T2。此步的目的是依据粗时间差,找到待匹配数据T2与参考数据R2之间对应的时间段,使参考数据R2包含待匹配数据T2,且前后各超出待匹配数据T2一定长度的原则,截取参考数据R2及待匹配数据T2。本实施例中,求得的粗匹配时间精度为1秒级,故在取FSAS数据时,使得其前后各超出FSAS数据0.5秒,进入S5。
S5:统一R2和T2采样率,得到相同采样率的参考数据R3和待匹配数据T3;FSAS采样率为200Hz,EPSON采样率为125Hz,最终对T0进行线性内插,使其采样率为200Hz。
经上述所有步骤后,FSAS数据为R3,EPSON数据为T3。
S6:求得R3和T3的最优时间差bias及时标漂移因子k;时间差及时标漂移因子的求解是本算法的核心,计算量最大,同时也是最复杂的一步。
S6.1:计算亚采样间隔时间T_inter,以采样间隔的1/10~1/2之间为宜。亚采样间隔定义为低于采样间隔的任意值,具体实施中,以用户精度要求为准则,适当取值。T_inter过小,精度有提高,但准确度没有提高,且计算量增大;T_inter过大,达不到提高精度的要求。例如,本例中R3与T3的采样间隔时间为0.005秒,则亚采样间隔T_inter定义为采样间隔的1/5秒。
S6.2:以T_inter为倍数因子,计算待匹配数据向右平移距离的δs。在第一次循环时,δs为0倍T_inter,即δs=0×T_inter=0。
S6.3:判断δs是否为采样间隔的正整数倍。若是,转到步骤S6.15若不是,转到步骤S6.4。
S6.4:将EPSON数据平移δs。先将T3的时间列进行向右平移,平移距离为δs,平移后时间列作为内插点,将其他列数据线性内插出新的数值T4。例如存在原始时间t1、t2,对应的数值为val1、val2,则对于新的时间t3(t1<t3<t2),对应的数值val3由下式线性内插出来:
S6.5:以Δt为窗口长度,将T4分为有限的n段,取当前段数据T4(i),1≤i≤n。Δt窗口长度内,应能包含丰富的动态信息,以克制随机噪声的影响。本例中,Δt取为60秒,T4被分为61段,取第一段T4(1)。
S6.6:判断待匹配数据是否提取到第n段。若是,转到步骤S6.13。若不是,转到步骤S6.7。
S6.7:设定滑动窗口W1,窗长为Δt,起始点为当前段开始时刻。窗长与S6.5中的窗长一样为60秒,W1每次沿时间轴向后平移一个采样间隔取参考数据,窗口滑动距离为W1向后平移总时间,计算方式为:W1向后平移采样间隔数乘以采样间隔时间。
S6.8:判断窗口滑动距离是否大于设定长度σs(σs依据粗匹配时间精度而定,约为两倍粗匹配时间精度),如若是,转到步骤S6.11。否则,以W1为窗口,取参考数据R3(W1)。本例中,σs为1秒。
S6.9:计算T4(i)与R3(W1)之间的皮尔森相关系数。皮尔森相关系数计算原理如下式:
其中 为x序列均值, 为y序列均值,N为序列x和y的长度,r为序列x和y之间的皮尔森相关系数。此例中,T4(i)与R3(W1)各含六列数据,各对应列数据依据上式单独进行相关系数求解,每一对应轴均得到一个相关系数,共六个。
S6.10:判断参考数据是否读到最后一位,若是,转到步骤S6.11。否则,将窗口W1向后滑动一个参考数据的采样间隔后,转到步骤S6.8。
S6.11:计算此段时间差Bias(i)及对应的时间time(i)。对于此段EPSON数据,W1的滑动过程中,T4(i)与R3(W1)每一对应列数据之间均可得相应的相关系数列。对其中一组对应列数据而言,当相关系数最大时,两列数据波形最佳匹配,此时的最大相关系数max_corr,W1向右滑动的采样间隔数为num。则此轴可用下式计算出一个Bias(i),其他轴同理。
Bias(i)=R3(t0)-T4(t0)+R3_interval×num
R3(t0)为R3开始时间,T4(t0)为T4开始时间,R3_interval为W1右向移动一个采样间隔所代表的时间,此例为R3的采样间隔,则R3_interval×num为W1向右滑动总时长。
计算得到六个轴的Bias(i)后,以各轴max_corr为权重,加权平均得到T4(i)唯一的Bias(i),此段的max_corr(i)为各轴max_corr的算术平均值,time(i)为T4(i)的中间时刻时间。
此段待匹配数据与参考数据之间的时间差已计算完毕。
S6.12:提取下一段待匹配数据。取下一段T4(i),转到步骤6.6。
如图4-1和4-2所示,为EPSON六个轴所有段求得的最大相关系数。相关系数越大,数据波形匹配程度越高。从图中也可看出,在第16段之后,相关系数接近于1,表明EPSON与FSAS数据波形一致性较高,且能由此方法识别出最佳匹配段。
如图5-1和5-2所示,由各段最大相关系数计算得到的时间差序列,选取相关系数较大时的时段。由图中可看出此方法不仅能计算出EPSON的时间差,还可发现EPSON的频标存在漂移。
S6.13:最小二乘平差求时间差bias及时标漂移因子k。以bias及k作为待估参数,Bias(i)为观测值,观测方程如下:
Bias(i)=k×[time(i)-t0]+bias
其中bias的初值Bias0为Bias(i)序列中值,对应的时间即为t0,k的初值为0。
Bias(i)的权为max_corr(i)。为去除观测值中的粗差,设定一个相关系数阈值σr,此例中,σr为0.9。只有当max_corr(i)大于0.9时,观测值才代入观测方程,进行最小二乘平差求解,求得一组bias及k。
S6.14:判断δs是否大于一个采样间隔,若是,则转到步骤S6.15。否则,将δs增加一倍T_inter,转到步骤S6.3。
S6.15:选择最佳bias及k组合。利用不同组bias及k,得到不同时间同步后的待匹配数据。计算待匹配数据与参考数据之间的协方差。若数据为单轴,则选择协方差最大时的那组bias和k作为最佳bias和k组合;若数据为多轴时,以实际经验为准,选择最可信的一轴数据进行协方差求解,选择最佳bias和k组合。
S7:根据最佳bias及k组合,更新待匹配数据T0时间,并存储。本例中,最可信的为第4列数据,时间同步后,第三组数据得到的协方差最大。利用下式计算更新T0时间:
t′=(t-t0)×k+bias+t
其中,t为T0的时间列,t0为步骤6.12中选择的时间差初值对应的时间,k为时标漂移因子,bias为时间差,t′为t更新后时间。
将T0中的时间列用t′代替,并将数据重新存储为与T0数据格式一致的数据文件。
S8:结束。
如图6所示,为利用本发明算法对EPSON及FSAS进行时间同步后,垂向陀螺方向在同一时间标下波形图。从此图可看出,本算法能正确进行时间同步运算。
如图7所示,为图6中某个时段内的波形匹配局部细节图。由图中可看出,本算法不仅能正确进行待匹配数据与参考数据之间的时间同步,且同步精度较高。
一种基于波形匹配的时间同步系统,其特征在于,包括如下模块:
读取模块:用于读取参考数据R0及待匹配数据T0;
数据处理格式模块:用于统一参考数据R0及待匹配数据T0的数据处理格式,提取出转换后的参考数据R1及待匹配数据T1;
降采样模块:用于分别对R1和T1降采样,对降采样后的参考数据R2及待匹配数据T2进行互相关序列求解,取互相关序列最大值时对应的间隔,求出此时的粗时间差int_bias;
粗时间差模块:用于根据求得的粗时间差int_bias,使参考数据R2的时间段覆盖待匹配数据T2的时间段,且前后各超出待匹配数据T2一定长度,截取参考数据R2及待匹配数据T2;
采样率计算模块:用于统一R2和T2采样率,得到相同采样率的参考数据R3和待匹配数据T3;
计算模块:用于求得R3和T3的最优时间差bias及时标漂移因子k;
更新模块:用于根据最佳bias及k组合,更新待匹配数据T0时间,并存储。
一种基于波形匹配的时间同步方法及系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0