








专利摘要
本发明提供一种偏振态参量的点衍射式数字全息测量装置与方法属于偏振态参量测量领域。线偏振入射光束被分成聚焦的参考光和物光;参考光照射在孔阵列上并被针孔A过滤后,依次经过第二透镜和偏振分光棱镜被分成偏振态正交的两束光,分别照射双平面反射镜上并被反射,再次依次经过偏振分光棱镜、第二透镜、孔阵列的两大孔B和非偏振分光棱镜照射在第四透镜上;物光经过第三透镜后照射在第三反射镜上并被反射,再依次经过第三透镜和非偏振分光棱镜照射在第四透镜上;汇合在第四透镜的参考光和物光,在图像传感器平面上产生干涉形成载频方向正交的全息图,并用图像传感器采集全息图上传到计算机中,通过计算机获得Stokes矩阵参量和Jones矩阵参量。
权利要求
1.偏振态参量的点衍射式数字全息测量装置,包括波长为λ的光源、偏振态调制系统、准直扩束系统、待测物体,其特征在于:还包括第一透镜、非偏振分光棱镜、孔阵列、第二透镜、偏振分光棱镜、两个单平面反射镜、第三透镜、平面反射镜、第四透镜、图像传感器和计算机;光源发射的光束经过偏振态调制系统调制,形成一束线偏振光束,依次经过准直扩束系统、待测物体、第一透镜和非偏振分光棱镜后形成聚焦的参考光和物光;参考光照射在孔阵列上并被针孔A过滤后,依次经过第二透镜和偏振分光棱镜被分成偏振态正交的两束光,偏振态正交的两束光分别照射两个单平面反射镜上并被反射,再次依次经过偏振分光棱镜、第二透镜、孔阵列的两大孔B和非偏振分光棱镜照射在第四透镜上;物光经过第三透镜后照射在第三反射镜上并被反射,再次依次经过第三透镜和非偏振分光棱镜照射在第四透镜上;汇合在第四透镜的参考光和物光由图像的光接收面接收,图像传感器的图像信号输出端连接计算机;所述的待测物体位于第一透镜的前焦面上;第一透镜、第二透镜和第四透镜构成共轭4f系统,第一透镜、第三透镜和第四透镜构成共轭4f系统;孔阵列位于第一透镜和第四透镜的共轭焦平面上,且针孔A大小与波长λ在傅里叶平面产生的艾里斑直径大小d一致,其中d<1.22λf/D、f为第一透镜和第四透镜的焦距、D为图像传感器的视场宽度,两大孔B可让经两个单平面反射镜反射回的参考光束全部通过;两个单平面反射镜位于第二透镜的共轭后焦平面上,且第一反射镜调整参考光在水平方向与光轴成θa角,第二反射镜调整参考光在垂直方向与光轴成θb角,或第一反射镜调整参考光在垂直方向与光轴成θa角,第二反射镜调整参考光在水平方向与光轴成θb角;平面反射镜位于第三透镜的后焦平面上;图像传感器位于第四透镜的后焦平面上。
2.根据权利要求1所述的偏振态参量的点衍射式数字全息测量装置,其特征在于:偏振态调制系统由旋转线偏振片与1/4波片组合实现。
3.一种基于偏振态参量的点衍射式数字全息测量装置的测量方法,其特征在于:步骤如下:
(1)打开光源,射出波长为λ的光束经偏振态调制系统调制后形成线偏振光,依次经过准直扩束系统、待测物体、第一透镜和非偏振分光棱镜后形成聚焦的参考光和物光;参考光照射在孔阵列上并被针孔A过滤后,依次经过第二透镜和偏振分光棱镜被分成偏振态正交的两束光,分别照射两个单平面反射镜上并被反射,再次依次经过偏振分光棱镜、第二透镜、孔阵列的两大孔B和非偏振分光棱镜照射在第四透镜上;物光经过第三透镜后照射在第三反射镜上并被反射,再次依次经过第三透镜和非偏振分光棱镜照射在第四透镜上;汇合在第四透镜的参考光和物光,在图像传感器平面上产生干涉形成载频方向正交的全息图,并用图像传感器采集全息图上传到计算机中;
(2)测量Stokes矩阵参量时,调整偏振态调制系统,使输入光束形成+45°或-45°线偏振光,采集获得一幅载频正交全息图I;
计算待测物体的复振幅分布得到:
Ai(x,y)=IFT{C{FT{I(x,y)}·Fi}}
其中:i=x、y,Fi表示滤波器,FT表示傅里叶变换,IFT表示逆傅里叶变换,C表示频谱置中操作;
得Stokes参量矩阵为:
其中: 为待测波面水平方向和垂直方向的相位差;
(3)测量Jones矩阵参量时,调整偏振态调制系统,使输入光束形成+45°或-45°线偏振光,第一次曝光采集获得第一幅载频正交全息图I1;再次调整偏振态调制系统,使输入光束形成-45°(或+45°)线偏振光,第二次曝光采集获得第二幅载频正交全息图I2;
计算待测物体的复振幅分布得:
Ani(x,y)=IFT{C{FT{I(x,y)}·Fni}}
其中:n=1、2,i=x、y,Fni表示滤波器,FT表示傅里叶变换,IFT表示逆傅里叶变换,C表示频谱置中操作;
则待测物体的Jones矩阵参量为:
说明书
技术领域
本发明涉及一种偏振态参量的点衍射式数字全息测量装置与方法,属于偏振态参量测量领域。
背景技术
偏振态是描述光波波前特征的重要参量之一,可用Stokes矩阵参量、Jones矩阵参量等表征,对其测量在生物光子学、非线性光学、化学和矿物质学等领域具有重要的科学意义和应用价值。但传统的偏振态测量装置只能提供待测波前传播方向上固定位置处的偏振信息,且由于不具备二维采样特性,需频繁调整光路和多次曝光来实现偏振态参量的测量。为了提高偏振态参量参量的测量效率,国内外学者作了很多有益尝试,其中,数字全息由于采用干涉方法记录待测波前的振幅和相位信息,并通过数字方法完成重构,为光束的偏振态参量全场快速测量提供了可能,从而引起广泛关注。
美国伊利诺伊大学香槟分校的Gabriel Popescu等(Zhuo Wang,Larry J.Millet,Martha U.Gillette,and Gabriel Popescu,"Jones phase microscopy of transparent and anisotropic samples,"Opt.Lett.33,1270-1272(2008))利用离轴数字全息实现了琼斯矩阵测量,但该技术需要四次曝光采集才能实现琼斯矩阵参量测量,测量速度受限;同时因为采用分离光路结构,抗干扰能力差。
韩国的YongKeun Park等(Youngchan Kim,Joonwoo Jeong,Jaeduck Jang,Mahn Won Kim,and YongKeun Park,"Polarization holographic microscopy for extracting spatio-temporally resolved Jones matrix,"Opt.Express 20,9948-9955(2012))等利用共路数字全息生成载频正交的全息图,进而通过两次曝光采集实现了琼斯矩阵参量测量,在提高抗干扰能力的同时,提高了测量效率。但是该方法需要二维光栅和孔阵列匹配,并辅以偏振正交的两块偏振片,不仅结构复杂,而且调整困难。
专利CN 104198040 B“一种二维琼斯矩阵参量的全息测量方法及实施装置”利用双二维光栅分光技术,结合频谱复用技术,通过一次曝光可实现琼斯矩阵参量测量,但该装置不仅进一步增加了系统复杂度,而且光利用率,同时因为采用采用分离光路结构,抗干扰能力差。
南京师范大学的袁操今等(马骏,袁操今,冯少彤,聂守平,“基于数字全息及复用技术的全场偏振态测试方法”,物理学报.22,224204(2013))利用偏振和角分复用技术,通过一次曝光可实现Stokes矩阵参量和琼斯矢量测量,但是因为采用采用分离光路结构,抗干扰能力差;同时受结构限制,偏振态正交的频谱在频谱空间分离有限,进而造成串扰,影响偏振态参量的测量精度。
发明内容
本发明的目的在于针对上述技术的不足之处,将偏振分光调制技术和频谱正交复用技术相结合,提供一种结构简单,系统稳定的偏振态参量的点衍射式数字全息测量装置,且还提供一种满足和适用上述方法的偏振态参量的点衍射式数字全息测量方法。
本发明的目的是这样实现的:包括波长为λ的光源、偏振态调制系统、准直扩束系统、待测物体,其特征在于:还包括第一透镜、非偏振分光棱镜、孔阵列、第二透镜、偏振分光棱镜、两个双平面反射镜、第三透镜、平面反射镜、第四透镜、图像传感器和计算机。光源发射的光束经过偏振态调制系统调制,形成一束线偏振光束,依次经过准直扩束系统、待测物体、第一透镜和非偏振分光棱镜后形成聚焦的参考光和物光;参考光照射在孔阵列上并被针孔A过滤后,依次经过第二透镜和偏振分光棱镜被分成偏振态正交的两束光,偏振态正交的两束光分别照射两个双平面反射镜上并被反射,再次依次经过偏振分光棱镜、第二透镜、孔阵列的两大孔B和非偏振分光棱镜照射在第四透镜上;物光经过第三透镜后照射在第三反射镜上并被反射,再次依次经过第三透镜和非偏振分光棱镜照射在第四透镜上;汇合在第四透镜的参考光和物光由图像的光接收面接收,图像传感器的图像信号输出端连接计算机;所述的待测物体位于第一透镜的前焦面上;第一透镜、第二透镜和第四透镜构成共轭4f系统,第一透镜、第三透镜和第四透镜构成共轭4f系统;孔阵列位于第一透镜和第四透镜的共轭焦平面上,且针孔A大小与波长λ在傅里叶平面产生的艾里斑直径大小d一致,其中d<1.22λf/D、f为第一透镜和第四透镜的焦距、D为图像传感器的视场宽度,两大孔B可让经双平面反射镜反射回的参考光束全部通过;双平面反射镜位于第二透镜的共轭后焦平面上,且第一反射镜调整参考光在水平方向与光轴成θa角,第二反射镜调整参考光在垂直方向与光轴成θb角,或第一反射镜调整参考光在垂直方向与光轴成θa角,第二反射镜调整参考光在水平方向与光轴成θb角;平面反射镜位于第三透镜的后焦平面上;图像传感器位于第四透镜的后焦平面上。
本发明还包括这样一些结构特征:
1.偏振态调制系统由旋转线偏振片或线偏振片与1/4波片组合实现。
2.偏振态参量的点衍射式数字全息测量方法,包括偏振态参量的点衍射式数字全息测量装置,步骤如下:
(1)打开光源,射出波长为λ的光束经偏振态调制系统调制后形成线偏振光,依次经过准直扩束系统、待测物体、第一透镜和非偏振分光棱镜后形成聚焦的参考光和物光;参考光照射在孔阵列上并被针孔A过滤后,依次经过第二透镜和偏振分光棱镜被分成偏振态正交的两束光,分别照射双平面反射镜上并被反射,再次依次经过偏振分光棱镜、第二透镜、孔阵列的两大孔B和非偏振分光棱镜照射在第四透镜上;物光经过第三透镜后照射在第三反射镜上并被反射,再次依次经过第三透镜和非偏振分光棱镜照射在第四透镜上;汇合在第四透镜的参考光和物光,在图像传感器平面上产生干涉形成载频方向正交的全息图,并用图像传感器采集全息图上传到计算机中;
(2)测量Stokes矩阵参量时,调整偏振态调制系统,使输入光束形成+45°或-45°线偏振光,采集获得一幅载频正交全息图I;
计算待测物体的复振幅分布得到:
Ai(x,y)=IFT{C{FT{I(x,y)}·Fi}}
其中:i=x、y,Fi表示滤波器,FT表示傅里叶变换,IFT表示逆傅里叶变换,C表示频谱置中操作;
得Stokes参量矩阵为:
其中: 为待测波面水平方向和垂直方向的相位差;
(3)测量Jones矩阵参量时,调整偏振态调制系统,使输入光束形成+45°或-45°线偏振光,第一次曝光采集获得第一幅载频正交全息图I1;再次调整偏振态调制系统,使输入光束形成-45°(或+45°)线偏振光,第二次曝光采集获得第二幅载频正交全息图I2;
计算待测物体的复振幅分布得:
Ani(x,y)=IFT{C{FT{I(x,y)}·Fni}}
其中:n=1、2,i=x、y,Fni表示滤波器,FT表示傅里叶变换,IFT表示逆傅里叶变换,C表示频谱置中操作;
则待测物体的Jones矩阵参量为:
与现有技术相比,本发明的有益效果是:
本发明的基于透射式点衍射数字全息的偏振态参量测量方法有以下特点和有益效果:
1.在透射式点衍射结构基础上,引入偏振分光调制技术和频谱复用技术,形成载频正交的全息图,并可利用同一装置完成Stokes矩阵参量和琼斯矩阵参量测量,在保证抗干扰能力的同时,不需要二维光栅等特殊光学元件,方法简单易行,这是区别于现有技术的创新点之一;
2.通过偏振分光调制技术将一束45°线偏振光物光分成偏振态正交的两束物光,只需利用双快平面反射镜放置不同姿态即可在两束物光中引入正交载频,不仅方便灵活,而且可最大限度的避免频谱间串扰,这是区别于现有技术的创新点之二。
本发明的装置有如下显著特点:
1.本发明装置结构简单,成本低,不需任何二维光栅等特殊光学元件;
2.本发明装置采用透射式点衍射构成共光路结构,系统抗干扰能力强,稳定性好。
附图说明
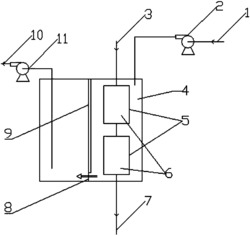
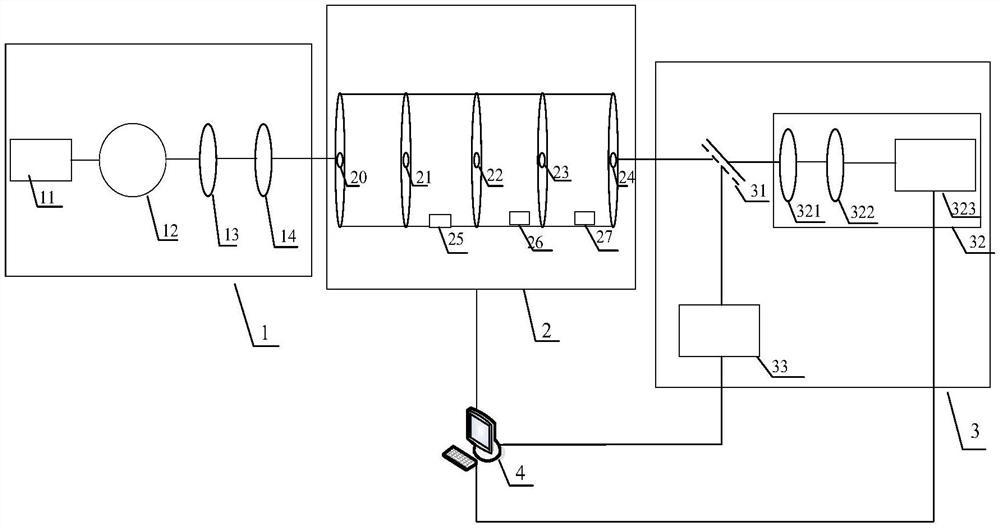
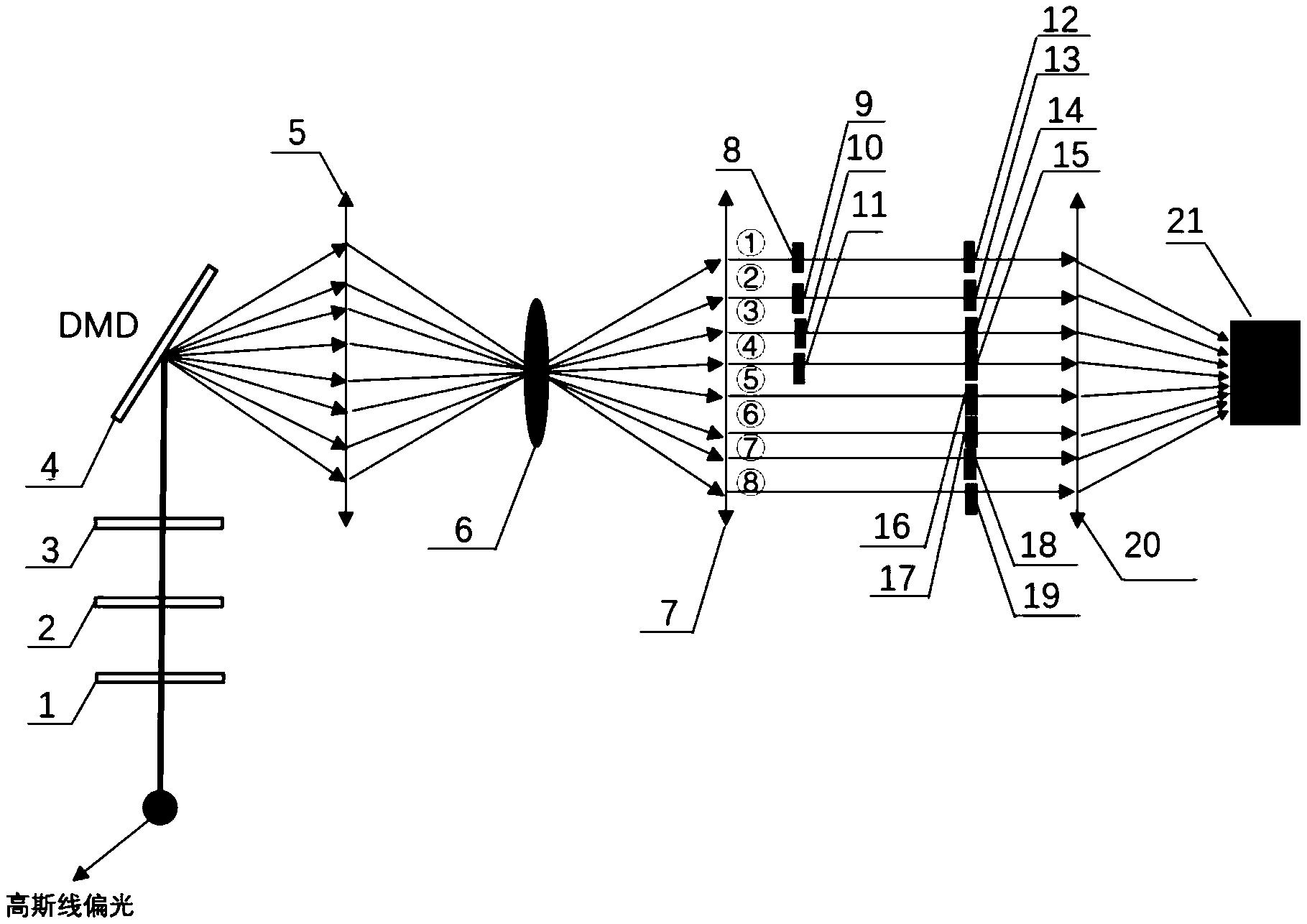
图1为基于透射式点衍射数字全息的偏振态参量测量装置示意图;
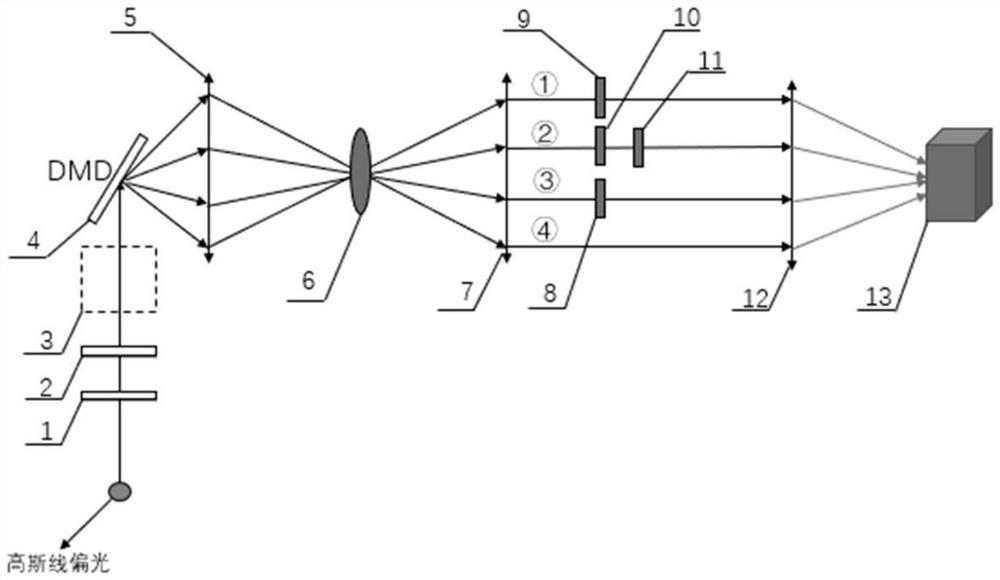
图2为参考光路中孔阵列示意图。
图中:1光源,2偏振态调制系统,3准直扩束系统,4待测物体,5第一透镜,6非偏振分光棱镜,7孔阵列,8第二透镜,9偏振分光棱镜,10和11双平面反射镜,12第三透镜,13第三平面反射镜,14第四透镜,15图像传感器,16计算机。
具体实施方式
下面结合附图与具体实施方式对本发明作进一步详细描述。
图1所示的为一种偏振态参量的点衍射式数字全息测量装置结构示意图,包括波长为λ的光源、偏振态调制系统、准直扩束系统、待测物体,该装置还包括第一透镜、非偏振分光棱镜、孔阵列、第二透镜、偏振分光棱镜、双平面反射镜、第三透镜、平面反射镜、第四透镜、图像传感器和计算机。
按照光的路径描述,光源发射的光束经过偏振态调制系统调制,形成一束线偏振光束,依次经过准直扩束系统、待测物体、第一透镜和非偏振分光棱镜后形成聚焦的参考光和物光;参考光照射在孔阵列上并被针孔A过滤后,依次经过第二透镜和偏振分光棱镜被分成偏振态正交的两束光,分别照射双平面反射镜上并被反射,再次依次经过偏振分光棱镜、第二透镜、孔阵列的两大孔B和非偏振分光棱镜照射在第四透镜上;物光经过第三透镜后照射在第三反射镜上并被反射,再次依次经过第三透镜和非偏振分光棱镜照射在第四透镜上;汇合在第四透镜的参考光和物光由图像的光接收面接收,图像传感器的图像信号输出端连接计算机;所述的待测物体位于第一透镜的前焦面上;第一透镜、第二透镜和第四透镜构成共轭4f系统,第一透镜、第三透镜和第四透镜构成共轭4f系统;孔阵列位于第一透镜和第四透镜的共轭焦平面上,且针孔A大小与波长λ在傅里叶平面产生的艾里斑直径大小d一致,其中d<1.22λf/D、f为第一透镜和第四透镜的焦距、D为图像传感器的视场宽度,两大孔B可让经双平面反射镜反射回的参考光束全部通过;双平面反射镜位于第二透镜的共轭后焦平面上,且第一反射镜调整参考光在水平方向与光轴成θa角,第二反射镜调整参考光在垂直方向与光轴成θb角,或第一反射镜调整参考光在垂直方向与光轴成θa角,第二反射镜调整参考光在水平方向与光轴成θb角;平面反射镜位于第三透镜的后焦平面上;图像传感器位于第四透镜的后焦平面上。
偏振态调制系统可由旋转线偏振片或线偏振片与1/4波片组合实现。
偏振态参量的点衍射式数字全息测量方法,它的实现过程如下:
(1)调整整个光学系统,打开光源,射出波长为λ的光束经偏振态调制系统调制后形成线偏振光,依次经过准直扩束系统、待测物体、第一透镜和非偏振分光棱镜后形成聚焦的参考光和物光;参考光照射在孔阵列上并被针孔A过滤后,依次经过第二透镜和偏振分光棱镜被分成偏振态正交的两束光,分别照射双平面反射镜上并被反射,再次依次经过偏振分光棱镜、第二透镜、孔阵列的两大孔B和非偏振分光棱镜照射在第四透镜上;物光经过第三透镜后照射在第三反射镜上并被反射,再次依次经过第三透镜和非偏振分光棱镜照射在第四透镜上;汇合在第四透镜的参考光和物光,在图像传感器平面上产生干涉形成载频方向正交的全息图,并用图像传感器采集全息图上传到计算机中;
(2)测量Stokes矩阵参量时,调整偏振态调制系统,使输入光束形成+45°(或-45°)线偏振光,采集获得一幅载频正交全息图I。
计算待测物体的复振幅分布可得
Ai(x,y)=IFT{C{FT{I(x,y)}·Fi}}
其中,i=x、y,Fi表示滤波器,FT表示傅里叶变换,IFT表示逆傅里叶变换,C表示频谱置中操作。
从而可得Stokes参量矩阵为
其中, 为待测波面水平方向和垂直方向的相位差。
(3)测量Jones矩阵参量时,调整偏振态调制系统,使输入光束形成+45°(或-45°)线偏振光,第一次曝光采集获得第一幅载频正交全息图I1;再次调整偏振态调制系统,使输入光束形成-45°(或+45°)线偏振光,第二次曝光采集获得第二幅载频正交全息图I2;
计算待测物体的复振幅分布可得
Ani(x,y)=IFT{C{FT{I(x,y)}·Fni}}
其中,n=1、2,i=x、y,Fni表示滤波器,FT表示傅里叶变换,IFT表示逆傅里叶变换,C表示频谱置中操作。
从而可得待测物体的Jones矩阵参量为
下面结合图1和图2对本发明的实施实例作详细说明。
本发明的装置包括:光源1、偏振态调制系统2、准直扩束系统3、待测物体4、第一透镜5、非偏振分光棱镜6、孔阵列7、第二透镜8、偏振分光棱镜9、双平面反射镜10和11、第三透镜12、第三平面反射镜13、第四透镜14、图像传感器15、计算机16,其中光源1为波长632.8nm激光器;待测物体4位于第一透镜5的前焦面上;第一透镜5、第二透镜8和第四透镜14构成共轭4f系统,第一透镜5、第三透镜12和第四透镜14构成共轭4f系统;第一透镜5、第二透镜8、第三透镜12和第四透镜的焦距均为f=200mm;孔阵列7位于第一透镜5和第四透镜14的共轭焦平面上,且针孔A大小与波长λ在傅里叶平面产生的艾里斑直径大小d一致,其中d=30μm,两大孔B可让经双平面反射镜10和11反射回的参考光束全部通过;双平面反射镜10和11位于第二透镜8的共轭后焦平面上,且双平面反射镜10调整参考光在水平方向与光轴成θa角,双平面反射镜11调整参考光在垂直方向与光轴成θb角;平面反射镜13位于第三透镜12的后焦平面上;图像传感器15位于第四透镜14的后焦平面上。该装置光的运行路径为:
光源1发射的光束经过偏振态调制系统2调制,形成一束线偏振光束,依次经过准直扩束系统3、待测物体4、第一透镜5和非偏振分光棱镜6后形成聚焦的参考光和物光;参考光照射在孔阵列7上并被针孔A过滤后,依次经过第二透镜8和偏振分光棱镜9被分成偏振态正交的两束光,分别照射双平面反射镜10和11上并被反射,再次依次经过偏振分光棱镜9、第二透镜8、孔阵列7的两大孔B和非偏振分光棱镜6照射在第四透镜14上;物光经过第三透镜12后照射在第三反射镜13上并被反射,再次依次经过第三透镜12和非偏振分光棱镜6照射在第四透镜14上;汇合在第四透镜14的参考光和物光,在图像传感器15平面上产生干涉形成载频方向正交的全息图,并用图像传感器15采集全息图上传到计算机16中。
测量Stokes矩阵参量时,调整偏振态调制系统,使输入光束形成+45°线偏振光,采集获得一幅载频正交全息图I,计算待测物体的复振幅分布可得:
Ai(x,y)=IFT{C{FT{I(x,y)}·Fi}}
其中,i=x、y,Fi表示滤波器,FT表示傅里叶变换,IFT表示逆傅里叶变换,C{}表示频谱置中操作。
从而可得Stokes参量矩阵为:
其中, 为待测波面水平方向和垂直方向的相位差。
测量琼斯矩阵参量时,调整偏振态调制系统,使输入光束形成+45°线偏振光,第一次曝光采集获得第一幅载频正交全息图I1;再次调整偏振态调制系统,使输入光束形成-45°线偏振光,第二次曝光采集获得第二幅载频正交全息图I2;
计算待测物体的复振幅分布可得:
Ani(x,y)=IFT{C{FT{I(x,y)}·Fni}}
其中,n=1、2,i=x、y,Fni表示滤波器,FT表示傅里叶变换,IFT表示逆傅里叶变换,C{}表示频谱置中操作。
从而可得待测物体的琼斯矩阵参量为:
本发明装置结构简单,成本低,不需任何二维光栅等特殊光学元件;本发明装置采用透射式点衍射构成共光路结构,系统抗干扰能力强,稳定性好。
综上,本发明提供一种偏振态参量的点衍射式数字全息测量装置与方法,属于偏振态参量测量领域。线偏振入射光束被分成聚焦的参考光和物光;参考光照射在孔阵列上并被针孔A过滤后,依次经过第二透镜和偏振分光棱镜被分成偏振态正交的两束光,分别照射双平面反射镜上并被反射,再次依次经过偏振分光棱镜、第二透镜、孔阵列的两大孔B和非偏振分光棱镜照射在第四透镜上;物光经过第三透镜后照射在第三反射镜上并被反射,再依次经过第三透镜和非偏振分光棱镜照射在第四透镜上;汇合在第四透镜的参考光和物光,在图像传感器平面上产生干涉形成载频方向正交的全息图,并用图像传感器采集全息图上传到计算机中,通过计算机获得Stokes矩阵参量和Jones矩阵参量。
偏振态参量的点衍射式数字全息测量装置与方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0