






专利摘要
本发明涉及可动翼飞行器和飞行机器人领域,特别是一种用于无人机的凸轮控制叶片转动的轮式动翼装置与轮式动翼方法。包括轮式动翼、传动机构、凸轮和旋转轴,轮式动翼固定连接在旋转轴上,传动机构连接轮式动翼和设置在飞行器上的凸轮,轮式动翼包括旋转框架,以及安装在旋转框架内的可转动的叶片,凸轮和传动机构用于控制叶片的转动和复位。本发明吸收了扑翼飞行和旋翼飞行的优点,又克服了两者的缺点,能解决目前小型和微型飞行器中存在的气动效率较低的瓶颈问题,具有待机行程阻力小、工作行程推力大且稳定、气动效率高、装置结构较简单、制造方便的特点,可广泛应用于低雷诺数飞行的各类小型飞行器和无人机中。
权利要求
1.凸轮控制叶片转动的轮式动翼装置,其特征在于:包括轮式动翼、传动机构、凸轮(6)和旋转轴(7),所述轮式动翼固定连接在所述旋转轴(7)上,所述传动机构连接所述轮式动翼和设置在飞行器上的所述凸轮(6);所述轮式动翼包括旋转框架(1),以及安装在所述旋转框架(1)内的可转动的叶片(2),所述凸轮(6)和所述传动机构用于控制所述叶片(2)的转动和复位;
所述旋转框架(1)上设置有中心孔(101)和直梁(102),所述直梁(102)的方向与所述中心孔(101)的轴线平行,所述直梁(102)上开有叶片安装孔(103),所述叶片安装孔(103)的轴线与所述中心孔(101)的轴线正交;所述叶片(2)包括相对设置的叶片正面(201)、叶片反面(203)以及设置在所述叶片(2)上的叶片转轴(202),所述叶片正面(201)与所述叶片反面(203)平行且都与所述叶片转轴(202)的轴线平行;所述叶片转轴(202)插装在所述叶片安装孔(103)内且可转动;所述旋转轴(7)连接所述中心孔(101)和设置在飞行器上的减速器(8);
所述传动机构包括拉环(3)、推杆(4)和滚轮(5);所述旋转框架(1)上设置有推杆孔(104),所述推杆孔(104)的轴线与所述中心孔(101)的轴线平行;拉环(3)上设置有叶片转轴孔(301)和长圆孔(302);推杆(4)上设置有推杆圆柱(401)、榫头圆柱(402)和滚轮安装孔(403),所述榫头圆柱(402)的轴线和所述滚轮安装孔(403)的轴线都与所述推杆圆柱(401)的轴线正交,所述叶片转轴(202)插装固定在叶片转轴孔(301)内;滚轮(5)上设置有同轴的滚轮圆柱(501)和滚轮安装轴(502);凸轮(6)上设置有凸轮圆柱面(601),所述凸轮圆柱面(601)与所述旋转轴(7)同轴,所述凸轮圆柱面(601)上设置有绕所述凸轮圆柱面(601)一周的连通的凸轮曲线槽(602);所述推杆圆柱(401)插装在所述推杆孔(104)内且满足滑动配合,所述榫头圆柱(402)插装在所述长圆孔(302)内且可滑动,所述滚轮安装轴(502)插装固定在所述滚轮安装孔(403)内,所述滚轮圆柱(501)插装在凸轮曲线槽(602)内且可滑动。
2.根据权利要求1所述的凸轮控制叶片转动的轮式动翼装置,其特征在于:所述凸轮曲线槽(602)由工作工况直槽(603)、待机工况直槽(604)、第一螺旋槽(605)和第二螺旋槽(606)组成,所述工作工况直槽(603)的一端与所述待机工况直槽(604)的一端通过所述第一螺旋槽(605)连通,所述工作工况直槽(603)的另一端与所述待机工况直槽(604)的另一端通过所述第二螺旋槽(606)连通。
3.根据权利要求2所述的凸轮控制叶片转动的轮式动翼装置,其特征在于:所述工作工况直槽(603)的两侧面为平面且都与所述凸轮圆柱面(601)的轴线垂直,所述工作工况直槽(603)的两侧面之间的距离与所述滚轮圆柱(501)的直径相等,所述待机工况直槽(604)的两侧面为平面且都与所述凸轮圆柱面(601)的轴线垂直,所述待机工况直槽(604)的两侧面之间的距离与所述滚轮圆柱(501)的直径相等,所述第一螺旋槽(605)的两侧面和所述第二螺旋槽(606)的两侧面均为螺旋曲面。
4.根据权利要求1所述的凸轮控制叶片转动的轮式动翼装置,其特征在于:还包括设置在所述飞行器上的电动机(9),所述电动机(9)的输出轴安装在所述减速器(8)输入孔内。
5.根据权利要求1所述的凸轮控制叶片转动的轮式动翼装置,其特征在于:所述旋转框架(1)上还包括用于加强所述旋转框架(1)的强度的外加强曲梁(105)和内加强曲梁(106)中的至少一种。
6.根据权利要求5所述的凸轮控制叶片转动的轮式动翼装置,其特征在于:所述直梁(102)、所述外加强曲梁(105)和所述内加强曲梁(106)均为空心结构;
或,所述直梁(102)、所述外加强曲梁(105)和所述内加强曲梁(106)为工程塑料材质;
或,所述直梁(102)、所述外加强曲梁(105)和所述内加强曲梁(106)为碳素纤维材质。
7.根据权利要求2所述的凸轮控制叶片转动的轮式动翼装置,其特征在于:所述直梁(102)和所述推杆孔(104)都在所述中心孔(101)周向均匀分布,所述直梁(102)的数量大于1个,所述推杆孔(104)的数量与所述直梁(102)的数量相同;所述叶片安装孔(103)在所述直梁(102)上直线均匀分布,每个所述直梁(102)上的所述叶片安装孔(103)的数量大于1个。
8.凸轮控制叶片转动的轮式动翼装置的轮式动翼方法,其特征在于,包括轮式动翼、传动机构、凸轮(6)和旋转轴(7),所述轮式动翼固定连接在所述旋转轴(7)上,所述传动机构连接所述轮式动翼和设置在飞行器上的所述凸轮(6);所述轮式动翼包括旋转框架(1),以及安装在所述旋转框架(1)内的可转动的叶片(2),所述旋转框架(1)上设置有中心孔(101)和直梁(102),所述凸轮(6)和所述传动机构用于控制所述叶片(2)的转动和复位;所述传动机构包括拉环(3)、推杆(4)和滚轮(5);所述旋转框架(1)上设置有推杆孔(104),所述推杆孔(104)的轴线与所述中心孔(101)的轴线平行;拉环(3)上设置有叶片转轴孔(301)和长圆孔(302);推杆(4)上设置有推杆圆柱(401)、榫头圆柱(402)和滚轮安装孔(403),所述榫头圆柱(402)的轴线和所述滚轮安装孔(403)的轴线都与所述推杆圆柱(401)的轴线正交,所述叶片转轴(202)插装固定在叶片转轴孔(301)内;滚轮(5)上设置有同轴的滚轮圆柱(501)和滚轮安装轴(502);凸轮(6)上设置有凸轮圆柱面(601),所述凸轮圆柱面(601)与所述旋转轴(7)同轴,所述凸轮圆柱面(601)上设置有绕所述凸轮圆柱面(601)一周的连通的凸轮曲线槽(602);所述推杆圆柱(401)插装在所述推杆孔(104)内且满足滑动配合,所述榫头圆柱(402)插装在所述长圆孔(302)内且可滑动,所述滚轮安装轴(502)插装固定在所述滚轮安装孔(403)内,所述滚轮圆柱(501)插装在凸轮曲线槽(602)内且可滑动;所述旋转框架(1)上设置有中心孔(101)和直梁(102),所述直梁(102)的方向与所述中心孔(101)的轴线平行,所述直梁(102)上开有叶片安装孔(103),所述叶片安装孔(103)的轴线与所述中心孔(101)的轴线正交;所述叶片(2)包括相对设置的叶片正面(201)、叶片反面(203)以及设置在所述叶片(2)上的叶片转轴(202),所述叶片正面(201)与所述叶片反面(203)平行且都与所述叶片转轴(202)的轴线平行;所述叶片转轴(202)插装在所述叶片安装孔(103)内且可转动;所述旋转轴(7)连接所述中心孔(101)和设置在飞行器上的减速器(8);所述凸轮曲线槽(602)由工作工况直槽(603)、待机工况直槽(604)、第一螺旋槽(605)和第二螺旋槽(606)组成,所述工作工况直槽(603)的一端与所述待机工况直槽(604)的一端通过所述第一螺旋槽(605)连通,所述工作工况直槽(603)的另一端与所述待机工况直槽(604)的另一端通过所述第二螺旋槽(606)连通;还包括设置在所述飞行器上的电动机(9),所述电动机(9)的输出轴安装在所述减速器(8)输入孔内;
包括以下步骤:
设置在所述飞行器中的所述电动机(9)可正向旋转也可反向旋转;
当所述电动机(9)正向旋转时,经过所述飞行器中的所述减速器(8)减速后带动所述旋转轴(7)连续转动,同时带动所述旋转框架(1)和连接在所述旋转框架(1)上的所述传动机构中的所述叶片(2)、所述拉环(3)、所述推杆(4)和所述滚轮(5)连续转动;
当所述滚轮(5)在所述飞行器上的所述凸轮(6)中的所述待机工况直槽(604)内滑动时,所述推杆(4)与所述旋转轴(7)保持同步旋转,在所述旋转轴(7)轴线方向不能运动,所述叶片(2)上的所述叶片正面(201)与旋转方向平行,即与相对气流方向平行,所述叶片(2)上受到的气体阻力最小,此时为待机工况;
当所述滚轮(5)转动到所述凸轮(6)中所述第二螺旋槽(606)内时,所述推杆(4)在与所述旋转轴(7)同步旋转的同时相对于所述旋转轴(7)轴线方向开始正向移动,所述榫头圆柱(402)的轴向运动使得所述拉环(3)发生正向转动,从而带动所述叶片转轴(202)正向转动;
当所述滚轮(5)转动到所述凸轮(6)中所述工作工况直槽(603)内时,所述推杆(4)相对于所述旋转轴(7)轴线方向不再运动,所述叶片转轴(202)刚好正向转动九十度,所述叶片正面(201)与气流方向垂直,气流直接作用在所述叶片正面(201)上使所述叶片(2)获得最大的气体推动力,气流作用在所述叶片正面(201)上的正压力可分解为升力和推力,此时为工作工况;
当所述滚轮(5)转动到所述凸轮(6)中所述第一螺旋槽(605)内时,所述推杆(4)在与所述旋转轴(7)同步旋转的同时相对于所述旋转轴(7)轴线方向开始反向移动,所述榫头圆柱(402)使所述拉环(3)发生反向转动,从而带动所述叶片转轴(202)反向转动;
当所述滚轮(5)转动到所述凸轮(6)中的所述待机工况直槽(604)内时,所述叶片转轴(202)反向转动九十度,所述叶片正面(201)又回到与气流方向平行,即待机状态
当所述电动机(9)反向旋转时,所述叶片(2)的运动过程与所述电动机(9)正向旋转时的过程相反,叶片反面(203)为气流作用面,轮式动翼装置产生气流反推力与所述电动机(9)正向旋转时反向。
说明书
技术领域
本发明涉及可动翼飞行器和飞行机器人领域,特别是一种用于无人机的凸轮控制叶片转动的轮式动翼装置与轮式动翼方法。
背景技术
飞行器飞行方式有固定翼、旋翼和扑翼三种飞行类型,旋翼和扑翼都属于可动翼。
扑翼飞行是自然界飞行生物采用的飞行方式,主要利用双翅的上下扑动同时产生升力和推力,其主要特点是将举升、悬停和推进功能基于一体,同时具有很强的机动性和灵活性,更适合于执行绕过障碍物等的飞行。对于小尺寸和低速飞行状态的飞行器,属于低雷诺数下飞行,扑翼产生的非定常升力比固定翼的定常升力大得多;从推力方面来看,扑翼推进效率比螺旋桨推进效率高。目前扑翼飞行器研究主要集中在模拟大自然中飞行生物的飞行姿态设计各种扑翼机构。但这些扑翼机构的共同问题是总体气动效率偏低,甚至低于同尺度的固定翼微型飞行器。扑翼飞行器总体效率低下的主要原因是目前研究中大多是简单的仿造鸟类或昆虫翅膀的外形和扑动运动,却很难实现飞行生物扑翼上下扑动过程中利用翼翅自身姿态或结构的改变减小空气阻力并产生非定常气动力,由此产生的气动效率较低问题严重制约了扑翼式飞行器的普及应用。
旋翼飞行是以旋翼(包括螺旋桨)的拉力提供飞行器的升力,飞行器的前进拉力来源于旋翼矢量的小角度偏转所产生的水平分量。目前发展迅速的多旋翼小型飞行器的姿态控制和水平运动是靠多旋翼的差动拉力来实现的。旋翼飞行器的特点是具有垂直起降和空中悬停功能,并具有在比较小的区域中飞行的能力。但由于旋翼飞行器的旋翼相对于其旋翼中心轴是不动的,因此前进阻力较大,所以能量消耗大,气动效率偏低,大功率长航时飞行较为困难。
发明内容
本发明的目的是提供一种非常显著的减小飞行器飞行阻力大、提升气动效率、同时提供升力和推力、不同于旋翼飞行和扑翼飞行的凸轮控制叶片转动的轮式动翼装置与轮式动翼方法,以解决现有扑翼和旋翼技术中存在的上述问题。
实现本发明目的的技术解决方案是:提供一种凸轮控制叶片转动的轮式动翼装置,包括轮式动翼、传动机构、凸轮和旋转轴,所述轮式动翼固定连接在所述旋转轴上,所述传动机构连接所述轮式动翼和设置在飞行器上的所述凸轮;所述轮式动翼包括旋转框架,以及安装在所述旋转框架内的可转动的叶片,所述凸轮和所述传动机构用于控制所述叶片的转动和复位。
进一步的是,所述旋转框架上设置有中心孔和直梁,所述直梁的方向与所述中心孔的轴线平行,所述直梁上开有叶片安装孔,所述叶片安装孔的轴线与所述中心孔的轴线正交;所述叶片包括相对设置的叶片正面、叶片反面以及设置在所述叶片上的叶片转轴,所述叶片正面与所述叶片反面平行且都与所述叶片转轴的轴线平行;所述叶片转轴插装在所述叶片安装孔内且可转动;所述旋转轴连接所述中心孔和设置在飞行器上的减速器。
进一步的是,所述传动机构包括拉环、推杆和滚轮;所述旋转框架上设置有推杆孔,所述推杆孔的轴线与所述中心孔的轴线平行;拉环上设置有叶片转轴孔和长圆孔;推杆上设置有推杆圆柱、榫头圆柱和滚轮安装孔,所述榫头圆柱的轴线和所述滚轮安装孔的轴线都与所述推杆圆柱的轴线正交,所述叶片转轴插装固定在叶片转轴孔内;滚轮上设置有同轴的滚轮圆柱和滚轮安装轴;凸轮上设置有凸轮圆柱面,所述凸轮圆柱面与所述旋转轴同轴,所述凸轮圆柱面上设置有绕所述凸轮圆柱面一周的连通的凸轮曲线槽;所述推杆圆柱插装在所述推杆孔内且满足滑动配合,所述榫头圆柱插装在所述长圆孔内且可滑动,所述滚轮安装轴插装固定在所述滚轮安装孔内,所述滚轮圆柱插装在凸轮曲线槽内且可滑动。
进一步的是,所述凸轮曲线槽由工作工况直槽、待机工况直槽、第一螺旋槽和第二螺旋槽组成,所述工作工况直槽的一端与所述待机工况直槽的一端通过所述第一螺旋槽连通,所述工作工况直槽的另一端与所述待机工况直槽的另一端通过所述第二螺旋槽连通。
进一步的是,所述工作工况直槽的两侧面为平面且都与所述凸轮圆柱面的轴线垂直,所述工作工况直槽的两侧面之间的距离与所述滚轮圆柱的直径相等,所述待机工况直槽的两侧面为平面且都与所述凸轮圆柱面的轴线垂直,所述待机工况直槽的两侧面之间的距离与所述滚轮圆柱的直径相等,所述第一螺旋槽的两侧面和所述第二螺旋槽的两侧面均为螺旋曲面。
进一步的是,还包括设置在所述飞行器上的电动机,所述电动机的输出轴安装在所述减速器输入孔内。
进一步的是,所述旋转框架上还包括外加强曲梁和内加强曲梁中的至少一种,用于加强所述旋转框架的强度。
进一步的是,所述直梁、所述外加强曲梁和所述内加强曲梁均为空心结构;
和/或,
所述直梁、所述外加强曲梁和所述内加强曲梁为工程塑料材质;
和/或,
所述直梁、所述外加强曲梁和所述内加强曲梁为碳素纤维材质。
进一步的是,所述直梁和所述推杆孔都在所述中心孔周向均匀分布,所述直梁的数量大于1个,所述推杆孔的数量与所述直梁的数量相同;所述叶片安装孔在所述直梁上直线均匀分布,每个所述直梁上的所述叶片安装孔的数量大于1个。
还提供了一种凸轮控制叶片转动的轮式动翼装置的轮式动翼方法,包括轮式动翼、传动机构、凸轮和旋转轴,所述轮式动翼固定连接在所述旋转轴上,所述传动机构连接所述轮式动翼和设置在飞行器上的所述凸轮;所述轮式动翼包括旋转框架,以及安装在所述旋转框架内的可转动的叶片,所述凸轮和所述传动机构用于控制所述叶片的转动和复位;所述旋转框架上设置有中心孔和直梁,所述直梁的方向与所述中心孔的轴线平行,所述直梁上开有叶片安装孔,所述叶片安装孔的轴线与所述中心孔的轴线正交;所述叶片包括相对设置的叶片正面、叶片反面以及设置在所述叶片上的叶片转轴,所述叶片正面与所述叶片反面平行且都与所述叶片转轴的轴线平行;所述叶片转轴插装在所述叶片安装孔内且可转动;所述旋转轴连接所述中心孔和设置在飞行器上的减速器;所述传动机构包括拉环、推杆和滚轮;所述旋转框架上设置有推杆孔,所述推杆孔的轴线与所述中心孔的轴线平行;拉环上设置有叶片转轴孔和长圆孔;推杆上设置有推杆圆柱、榫头圆柱和滚轮安装孔,所述榫头圆柱的轴线和所述滚轮安装孔的轴线都与所述推杆圆柱的轴线正交,所述叶片转轴插装固定在叶片转轴孔内;滚轮上设置有同轴的滚轮圆柱和滚轮安装轴;凸轮上设置有凸轮圆柱面,所述凸轮圆柱面与所述旋转轴同轴,所述凸轮圆柱面上设置有绕所述凸轮圆柱面一周的连通的凸轮曲线槽;所述推杆圆柱插装在所述推杆孔内且满足滑动配合,所述榫头圆柱插装在所述长圆孔内且可滑动,所述滚轮安装轴插装固定在所述滚轮安装孔内,所述滚轮圆柱插装在凸轮曲线槽内且可滑动;所述凸轮曲线槽由工作工况直槽、待机工况直槽、第一螺旋槽和第二螺旋槽组成,所述工作工况直槽的一端与所述待机工况直槽的一端通过所述第一螺旋槽连通,所述工作工况直槽的另一端与所述待机工况直槽的另一端通过所述第二螺旋槽连通;还包括设置在所述飞行器上的电动机,所述电动机的输出轴安装在所述减速器输入孔内;
包括以下步骤:
设置在所述飞行器中的所述电动机可正向旋转也可反向旋转;
当所述电动机正向旋转时,经过所述飞行器中的所述减速器减速后带动所述旋转轴连续转动,同时带动所述旋转框架和连接在所述旋转框架上的所述传动机构中的所述叶片、所述拉环、所述推杆和所述滚轮连续转动;
当所述滚轮在所述飞行器上的所述凸轮中的所述待机工况直槽内滑动时,所述推杆与所述旋转轴保持同步旋转,在所述旋转轴轴线方向不能运动,所述叶片上的所述叶片正面与旋转方向平行,即与相对气流方向平行,所述叶片上受到的气体阻力最小,此时为待机工况;
当所述滚轮转动到所述凸轮中所述第二螺旋槽内时,所述推杆在与所述旋转轴同步旋转的同时相对于所述旋转轴轴线方向开始正向移动,所述榫头圆柱的轴向运动使得所述拉环发生正向转动,从而带动所述叶片转轴正向转动;
当所述滚轮转动到所述凸轮中所述工作工况直槽内时,所述推杆相对于所述旋转轴轴线方向不再运动,所述叶片转轴刚好正向转动九十度,所述叶片正面与气流方向垂直,气流直接作用在所述叶片正面上使所述叶片获得最大的气体推动力,气流作用在所述叶片正面上的正压力可分解为升力和推力,此时为工作工况;
当所述滚轮转动到所述述凸轮中所述第一螺旋槽内时,所述推杆在与所述旋转轴同步旋转的同时相对于所述旋转轴轴线方向开始反向移动,所述榫头圆柱使所述拉环发生反向转动,从而带动所述叶片转轴反向转动;
当所述滚轮转动到所述凸轮中的所述待机工况直槽内时,所述叶片转轴反向转动九十度,所述叶片正面又回到与气流方向平行,即待机状态;
当所述电动机反向旋转时,所述叶片的运动过程与所述电动机正向旋转时的过程相反,叶片反面为气流作用面,轮式动翼装置产生气流反推力与所述电动机正向旋转时反向。
一种凸轮控制叶片转动的轮式动翼装置,包括旋转框架、叶片、拉环、推杆、滚轮、凸轮和旋转轴,旋转框架上有中心孔、直梁和推杆孔,直梁的方向与中心孔的轴线平行,直梁沿中心孔周向均匀分布,直梁上开有均匀分布的叶片安装孔,推杆孔在中心孔周向均匀分布,叶片安装孔的轴线与中心孔的轴线正交,推杆孔的轴线与中心孔的轴线平行,叶片上有叶片正面、叶片转轴和叶片反面,拉环上有叶片转轴孔和长圆孔,推杆上有推杆圆柱、榫头圆柱和滚轮安装孔,榫头圆柱的轴线与推杆圆柱的轴线正交,滚轮安装孔的轴线与推杆圆柱的轴线正交,滚轮上有同轴的滚轮圆柱和滚轮安装轴,凸轮上有凸轮圆柱面,凸轮圆柱面上开有绕凸轮圆柱面一周的连通的凸轮曲线槽,凸轮曲线槽由工作工况直槽、待机工况直槽、第一螺旋槽和第二螺旋槽组成,工作工况直槽的两侧面为平面且都与凸轮圆柱面的轴线垂直,待机工况直槽的两侧面为平面且都与凸轮圆柱面的轴线垂直,工作工况直槽的一端与待机工况直槽的一端通过第一螺旋槽连通,工作工况直槽的另一端与待机工况直槽的另一端通过第二螺旋槽连通,叶片转轴插装在叶片安装孔内且可转动,叶片转轴插装固定在叶片转轴孔内,推杆圆柱插装在推杆孔内且满足滑动配合,榫头圆柱插装在长圆孔内且可滑动,滚轮安装轴插装固定在滚轮安装孔内,滚轮圆柱插装在凸轮曲线槽内且可在凸轮曲线槽内滑动,凸轮安装固定在飞行器上,旋转轴插装固定在中心孔内,凸轮圆柱面与旋转轴同轴,工作工况直槽的两侧面之间的距离与滚轮圆柱的直径相等,待机工况直槽的两侧面之间的距离与滚轮圆柱的直径相等,第一螺旋槽的两侧面和第二螺旋槽的两侧面均为螺旋曲面,旋转轴安装在减速器的输出轴上,电动机的输出轴安装在减速器输入孔内,减速器和电动机都安装固定在飞行器上,旋转框架上有外加强曲梁和内加强曲梁,直梁、外加强曲梁和内加强曲梁都采用空心结构且采用工程塑料、碳素纤维等轻质材料。
一种凸轮控制叶片转动的轮式动翼方法,利用凸轮控制叶片在绕旋翼转轴连续旋转过程中的转动来提高工作状态时气流对叶片的推力并降低待机状态时气体的阻力,从而大幅度提高气动效率,即电动机启动后,经过减速器减速后带动旋转轴连续转动,同时带动旋转框架、叶片、拉环、推杆和滚轮连续转动,当滚轮在待机工况直槽内滑动时,推杆与旋转轴保持同步旋转,在旋转轴轴线方向不能运动,叶片上的叶片正面与旋转方向平行,即与相对气流方向平行,叶片上受到的气体阻力最小,此时为待机工况,当滚轮转动到第二螺旋槽内时,推杆在与旋转轴同步旋转的同时相对于旋转轴轴线方向开始正向移动,榫头圆柱的轴向运动使得拉环发生正向转动,从而带动叶片转轴正向转动,当滚轮转动到工作工况直槽内时,推杆相对于旋转轴轴线方向不再运动,叶片转轴刚好正向转动九十度,叶片正面与气流方向垂直,气流直接作用在叶片正面上使叶片获得最大的气体推动力,气流作用在叶片正面上的正压力可分解为升力和推力,此时为工作工况,当滚轮转动到第一螺旋槽内时,推杆在与旋转轴同步旋转的同时相对于旋转轴轴线方向开始反向移动,榫头圆柱使拉环发生反向转动,从而带动叶片转轴反向转动,当滚轮转动到待机工况直槽内时,叶片转轴反向转动九十度,叶片正面又回到与气流方向平行,即待机状态;当电动机反向旋转时,叶片的运动过程与电动机正向旋转时的过程相反,叶片反面为气流作用面,轮式动翼装置产生的气流反推力与电动机正向旋转时反向。
使用时,将本发明“凸轮控制叶片转动的轮式动翼装置”中的凸轮、减速器和电动机都安装固定在无人机上。
本发明的工作原理是:当电动机启动正向旋转时,经过减速器减速后带动旋转轴、旋转框架、叶片、拉环、推杆和滚轮连续转动,当滚轮在待机工况直槽内滑动时,推杆在旋转轴轴线方向不能运动,叶片上的叶片正面与旋转方向平行,即与相对气流方向平行,叶片上受到的气体阻力最小,此时为待机工况,当滚轮转动到第二螺旋槽内时,推杆在与旋转轴同步旋转的同时相对于旋转轴轴线方向开始正向移动,榫头圆柱的轴向运动使得拉环发生正向转动,从而带动叶片转轴正向转动,当滚轮转动到工作工况直槽内时,推杆相对于旋转轴轴线方向不再运动,叶片转轴刚好正向转动九十度,叶片正面与气流方向垂直,气流直接作用在叶片正面上使叶片获得最大的气体推动力,气流作用在叶片正面上的正压力可分解为升力和推力,此时为工作工况,当滚轮转动到第一螺旋槽内时,推杆在与旋转轴同步旋转的同时相对于旋转轴轴线方向开始反向移动,榫头圆柱使拉环发生反向转动,从而带动叶片转轴反向转动,当滚轮转动到待机工况直槽内时,叶片转轴反向转动九十度,叶片正面又回到与气流方向平行,回到待机状态;当电动机反向旋转时,轮式动翼装置产生的气流反推动力与电动机正向旋转时反向。本发明与现有技术相比,其显著优点是:
1. 本发明所述的凸轮控制叶片转动的轮式动翼装置与轮式动翼方法,通过将轮式动翼中叶片设置为连续旋转,保持了旋翼连续旋转的优点,克服了扑翼需要往复运动的弱点。
2. 本发明所述的凸轮控制叶片转动的轮式动翼装置与轮式动翼方法,通过凸轮控制连续旋转的叶片相对于中心旋转轴还可转动,使叶片在工作状态时以最大面积迎风运动获得最大气动力,而在待机状态时与气流方向平行从而阻力大大降低,达到提高气动效率的目的,其气动效率远高于现有旋翼和扑翼飞行器。
3. 本发明所述的凸轮控制叶片转动的轮式动翼装置与轮式动翼方法,可转叶片在工作状态与待机状态之间的切换是在凸轮控制下自动完成的,不需要复杂的电子控制系统,结构简单且可靠性较好。
4. 本发明所述的凸轮控制叶片转动的轮式动翼装置与轮式动翼方法,通过电机和减速器直接带动叶片连续旋转,叶片工作状态气流直接作用在其表面上的正压力可同时产生升力和推力,通过电机正反旋转达到控制轮式动翼产生正向推力和反向推力的目的。
5. 本发明所述的凸轮控制叶片转动的轮式动翼装置与轮式动翼方法,结构简单,加工工艺性好,生产成本低,并且装置在无人机上进行简单改造就可使用,安装简单。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
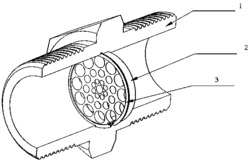
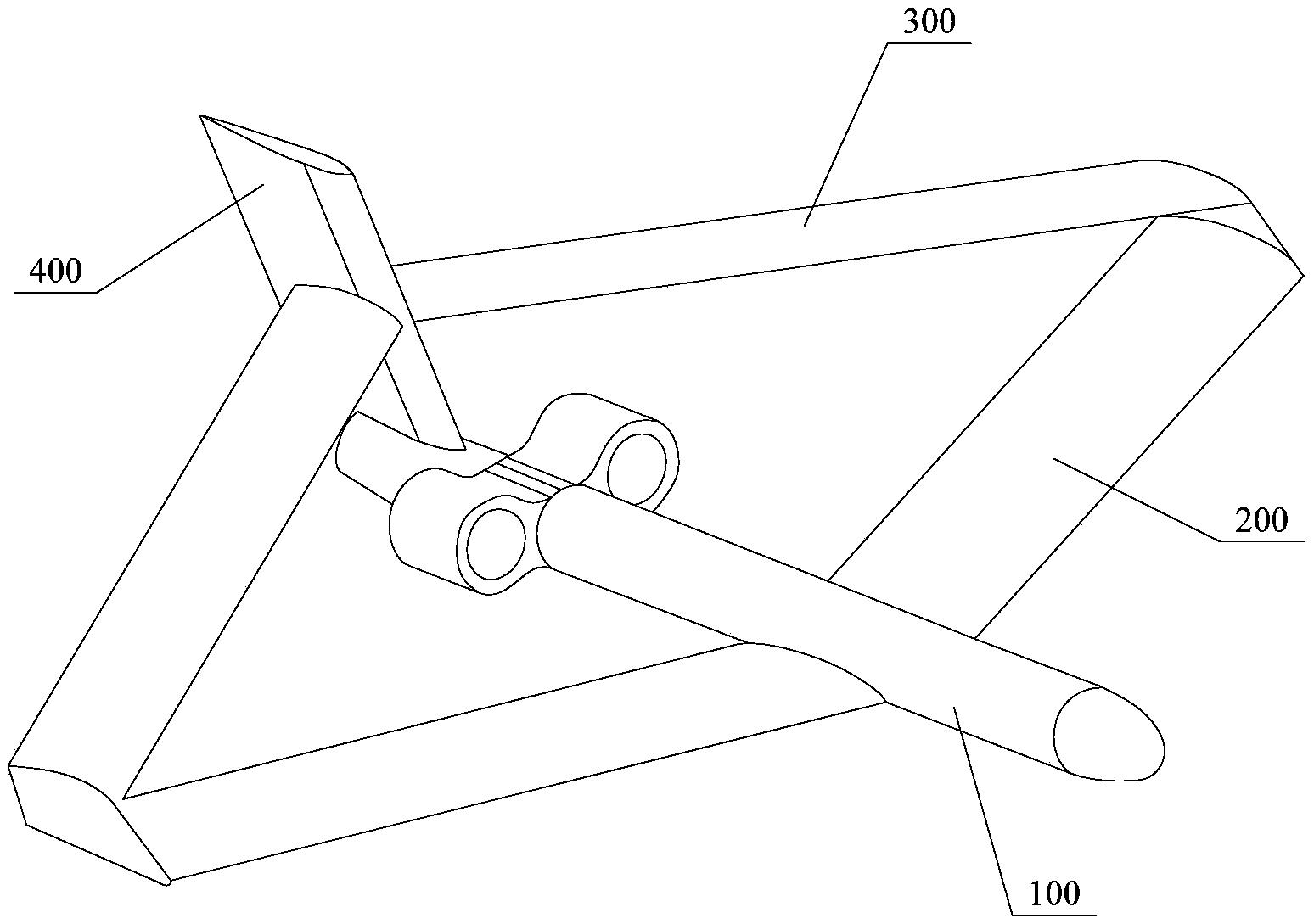
图1是本发明实施例1的凸轮控制叶片转动的轮式动翼装置的整体结构示意图。
图2是本发明实施例1的凸轮控制叶片转动的轮式动翼装置的详细结构示意图。
图3是本发明实施例1的凸轮控制叶片转动的轮式动翼装置待机状态详细结构示意图。
图4是本发明实施例1的凸轮控制叶片转动的轮式动翼装置待机状态向工作状态切换过程中的详细结构示意图。
图5是本发明实施例1的凸轮控制叶片转动的轮式动翼装置工作状态详细结构示意图。
图6是本发明实施例1的凸轮控制叶片转动的轮式动翼装置的旋转框架的结构示意图。
图7是本发明实施例1的凸轮控制叶片转动的轮式动翼装置的叶片的结构示意图。
图8是本发明实施例1的凸轮控制叶片转动的轮式动翼装置的拉环轮的结构示意图。
图9是本发明实施例1的凸轮控制叶片转动的轮式动翼装置的推杆的结构示意图。
图10是本发明实施例1的凸轮控制叶片转动的轮式动翼装置的滚轮的结构示意图。
图11是本发明实施例1的凸轮控制叶片转动的轮式动翼装置的凸轮的结构示意图。
图12是本发明实施例1的凸轮控制叶片转动的轮式动翼装置的凸轮剖切后的结构示意图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
下面结合附图对本发明作进一步描述,但不以任何方式限制本发明。
实施例1:
结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11和图12,采用凸轮控制叶片转动的轮式动翼装置与轮式动翼方法的高压电线巡检无人机,包括旋转框架1、叶片2、拉环3、推杆4、滚轮5、凸轮6和旋转轴7,旋转框架1上有中心孔101、直梁102和推杆孔104,直梁102的方向与中心孔101的轴线平行,中心孔101周向均匀分布的直梁102数量为3个,直梁102上开有叶片安装孔103,直梁102上均匀分布的叶片安装孔103的数量为4个,推杆孔104在中心孔101周向均匀分布,推杆孔104的数量与直梁102的数量相同,叶片安装孔103的轴线与中心孔101的轴线正交,推杆孔104的轴线与中心孔101的轴线平行,叶片2上有叶片正面201、叶片转轴202和叶片反面203,拉环3上有叶片转轴孔301和长圆孔302,推杆4上有推杆圆柱401、榫头圆柱402和滚轮安装孔403,榫头圆柱402的轴线与推杆圆柱401的轴线正交,滚轮安装孔403的轴线与推杆圆柱401的轴线正交,滚轮5上有同轴的滚轮圆柱501和滚轮安装轴502,凸轮6上有凸轮圆柱面601,凸轮圆柱面601上开有绕凸轮圆柱面601一周的连通的凸轮曲线槽602,凸轮曲线槽602由工作工况直槽603、待机工况直槽604、第一螺旋槽605和第二螺旋槽606组成,工作工况直槽603的两侧面为平面且都与凸轮圆柱面601的轴线垂直,待机工况直槽604的两侧面为平面且都与凸轮圆柱面601的轴线垂直,工作工况直槽603的一端与待机工况直槽604的一端通过第一螺旋槽605连通,工作工况直槽603的另一端与待机工况直槽604的另一端通过第二螺旋槽606连通,叶片转轴202插装在叶片安装孔103内且可转动,叶片转轴202插装固定在叶片转轴孔301内,推杆圆柱401插装在推杆孔104内且满足滑动配合,榫头圆柱402插装在长圆孔302内且可滑动,滚轮安装轴502插装固定在滚轮安装孔403内,滚轮圆柱501插装在凸轮曲线槽602内且可在凸轮曲线槽602内滑动,凸轮6安装固定在飞行器上,旋转轴7插装固定在中心孔101内,凸轮圆柱面601与旋转轴7同轴,工作工况直槽603的两侧面之间的距离与滚轮圆柱501的直径相等,待机工况直槽604的两侧面之间的距离与滚轮圆柱501的直径相等,第一螺旋槽605的两侧面和第二螺旋槽606的两侧面均为螺旋曲面,旋转轴7安装在减速器8的输出轴上,电动机9的输出轴安装在减速器8输入孔内,减速器8和电动机9都安装固定在飞行器上,旋转框架1上有外加强曲梁105和内加强曲梁106,直梁102、外加强曲梁105和内加强曲梁106都采用空心结构且采用碳素纤维材料。高压电线巡检无人机采用本发明凸轮控制叶片转动的轮式动翼装置后,由于轮式动翼阻力小、气动效率高,能完成各项检测和拍照工作,相对于旋翼无人机,在搭载摄影设备等相同的工作载荷后,一次飞行时间增加20%,实现了较长航时工作。
实施例2:
本实施例2提供一种高层灭火专用无人机,其结构同实施例1,不同的是:中心孔101周向均匀分布的直梁102数量为2个,直梁102上均匀分布的叶片安装孔103的数量为5个,直梁102、外加强曲梁105和内加强曲梁106都采用工程塑料。采用凸轮控制叶片转动的轮式动翼装置与轮式动翼方法的高层灭火专用无人机,包括旋转框架1、叶片2、拉环3、推杆4、滚轮5、凸轮6和旋转轴7,旋转框架1上有中心孔101、直梁102和推杆孔104,直梁102的方向与中心孔101的轴线平行,中心孔101周向均匀分布的直梁102数量为2个,直梁102上开有叶片安装孔103,直梁102上均匀分布的叶片安装孔103的数量为5个,推杆孔104在中心孔101周向均匀分布,推杆孔104的数量与直梁102的数量相同,叶片安装孔103的轴线与中心孔101的轴线正交,推杆孔104的轴线与中心孔101的轴线平行,叶片2上有叶片正面201、叶片转轴202和叶片反面203,拉环3上有叶片转轴孔301和长圆孔302,推杆4上有推杆圆柱401、榫头圆柱402和滚轮安装孔403,榫头圆柱402的轴线与推杆圆柱401的轴线正交,滚轮安装孔403的轴线与推杆圆柱401的轴线正交,滚轮5上有同轴的滚轮圆柱501和滚轮安装轴502,凸轮6上有凸轮圆柱面601,凸轮圆柱面601上开有绕凸轮圆柱面601一周的连通的凸轮曲线槽602,凸轮曲线槽602由工作工况直槽603、待机工况直槽604、第一螺旋槽605和第二螺旋槽606组成,工作工况直槽603的两侧面为平面且都与凸轮圆柱面601的轴线垂直,待机工况直槽604的两侧面为平面且都与凸轮圆柱面601的轴线垂直,工作工况直槽603的一端与待机工况直槽604的一端通过第一螺旋槽605连通,工作工况直槽603的另一端与待机工况直槽604的另一端通过第二螺旋槽606连通,叶片转轴202插装在叶片安装孔103内且可转动,叶片转轴202插装固定在叶片转轴孔301内,推杆圆柱401插装在推杆孔104内且满足滑动配合,榫头圆柱402插装在长圆孔302内且可滑动,滚轮安装轴502插装固定在滚轮安装孔403内,滚轮圆柱501插装在凸轮曲线槽602内且可在凸轮曲线槽602内滑动,凸轮6安装固定在飞行器上,旋转轴7插装固定在中心孔101内,凸轮圆柱面601与旋转轴7同轴,工作工况直槽603的两侧面之间的距离与滚轮圆柱501的直径相等,待机工况直槽604的两侧面之间的距离与滚轮圆柱501的直径相等,第一螺旋槽605的两侧面和第二螺旋槽606的两侧面均为螺旋曲面,旋转轴7安装在减速器8的输出轴上,电动机9的输出轴安装在减速器8输入孔内,减速器8和电动机9都安装固定在飞行器上,旋转框架1上有外加强曲梁105和内加强曲梁106,直梁102、外加强曲梁105和内加强曲梁106都采用空心结构且采用工程塑料。高层灭火专用无人机采用本发明凸轮控制叶片转动的轮式动翼装置与轮式动翼方法后,由于轮式动翼工作行程推力大、阻力小、气动效率高,因此有较强的机动性,能快速响应高层的紧急情况,快速飞行到高层失火点进行灭火。
实施例3:
本实施例3提供一种农业植保无人机,其结构同实施例1,不同的是:中心孔101周向均匀分布的直梁102数量为4个,直梁102上均匀分布的叶片安装孔103的数量为5个,直梁102、外加强曲梁105和内加强曲梁106都采用工程塑料。采用凸轮控制叶片转动的轮式动翼装置与轮式动翼方法的农业植保无人机,包括旋转框架1、叶片2、拉环3、推杆4、滚轮5、凸轮6和旋转轴7,旋转框架1上有中心孔101、直梁102和推杆孔104,直梁102的方向与中心孔101的轴线平行,中心孔101周向均匀分布的直梁102数量为4个,直梁102上开有叶片安装孔103,直梁102上均匀分布的叶片安装孔103的数量为5个,推杆孔104在中心孔101周向均匀分布,推杆孔104的数量与直梁102的数量相同,叶片安装孔103的轴线与中心孔101的轴线正交,推杆孔104的轴线与中心孔101的轴线平行,叶片2上有叶片正面201、叶片转轴202和叶片反面203,拉环3上有叶片转轴孔301和长圆孔302,推杆4上有推杆圆柱401、榫头圆柱402和滚轮安装孔403,榫头圆柱402的轴线与推杆圆柱401的轴线正交,滚轮安装孔403的轴线与推杆圆柱401的轴线正交,滚轮5上有同轴的滚轮圆柱501和滚轮安装轴502,凸轮6上有凸轮圆柱面601,凸轮圆柱面601上开有绕凸轮圆柱面601一周的连通的凸轮曲线槽602,凸轮曲线槽602由工作工况直槽603、待机工况直槽604、第一螺旋槽605和第二螺旋槽606组成,工作工况直槽603的两侧面为平面且都与凸轮圆柱面601的轴线垂直,待机工况直槽604的两侧面为平面且都与凸轮圆柱面601的轴线垂直,工作工况直槽603的一端与待机工况直槽604的一端通过第一螺旋槽605连通,工作工况直槽603的另一端与待机工况直槽604的另一端通过第二螺旋槽606连通,叶片转轴202插装在叶片安装孔103内且可转动,叶片转轴202插装固定在叶片转轴孔301内,推杆圆柱401插装在推杆孔104内且满足滑动配合,榫头圆柱402插装在长圆孔302内且可滑动,滚轮安装轴502插装固定在滚轮安装孔403内,滚轮圆柱501插装在凸轮曲线槽602内且可在凸轮曲线槽602内滑动,凸轮6安装固定在飞行器上,旋转轴7插装固定在中心孔101内,凸轮圆柱面601与旋转轴7同轴,工作工况直槽603的两侧面之间的距离与滚轮圆柱501的直径相等,待机工况直槽604的两侧面之间的距离与滚轮圆柱501的直径相等,第一螺旋槽605的两侧面和第二螺旋槽606的两侧面均为螺旋曲面,旋转轴7安装在减速器8的输出轴上,电动机9的输出轴安装在减速器8输入孔内,减速器8和电动机9都安装固定在飞行器上,旋转框架1上有外加强曲梁105和内加强曲梁106,直梁102、外加强曲梁105和内加强曲梁106都采用空心结构且采用工程塑料。农业植保无人机采用本发明凸轮控制叶片转动的轮式动翼装置与轮式动翼方法后,由于轮式动翼工作行程推力大、阻力小、气动效率高,相对于旋翼无人机,在相同的工作载荷时,一次飞行时间增加20%,实现了较长航时工作。
虽然结合附图描述了本发明的实施例,但是本领域技术人员可以在不脱离本发明的精神和范围的情况下作出各种修改和变型,这样的修改和变型均落入由所附权利要求所限定的范围之内。
凸轮控制叶片转动的轮式动翼装置与轮式动翼方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。





动态评分
0.0