





专利摘要
本发明公开的一种复合翼垂直起降无人机的姿态控制方法,通过建立固定翼模式和多旋翼模式的非线性运动学和动力学模型,以及固定翼模式和多旋翼模式的姿态控制系统,姿态控制系统采用PD控制器和区间二型模糊神经网络的结合,采用组合设计能够保证模糊神经网络在参数学习时的飞行器稳定性,其次也减少了复合翼垂直起降无人机在固定翼模式或多旋翼模式的控制误差,提高了控制的精度,保证了固定翼模式姿态控制系统和多旋翼模式姿态控制系统在工作时互不干扰,提高飞行的稳定性。
权利要求
1.一种复合翼垂直起降无人机的姿态控制方法,其特征在于,包括以下步骤:
步骤1、建立复合翼垂直起降无人机,在固定翼模式或多旋翼模式下的非线性运动学和动力学模型;
步骤2、构建复合翼垂直起降无人机在固定翼模式或多旋翼模式下的姿态控制系统;
所述姿态控制系统包括PD控制器和区间二型模糊神经网络;
所述PD控制器的输出,用于训练区间二型模糊神经网络;
所述PD控制器输出和区间二型模糊神经网络输出的差,用于输出姿态控制指令控制;
步骤3、将步骤1非线性运动学或动力学模型的反馈输入至姿态控制系统,得到固定翼模式或多旋翼模式下的姿态控制指令,根据姿态控制指令控制复合翼垂直起降无人机在固定翼模式或多旋翼模式下的飞行姿态;
当复合翼垂直起降无人机在转换模式下飞行时,将步骤3替换为如下步骤:
根据固定翼模式和多旋翼模式的控制系统,设计转换模式控制器,转换模式控制器根据空速变化计算加权系数;
根据固定翼模式和多旋翼模式的加权系数,分别确定固定翼执行机构和多旋翼执行机构的伺服指令;
根据伺服指令控制复合翼垂直起降无人机在转换模式下的飞行姿态。
2.根据权利要求1所述的一种复合翼垂直起降无人机的姿态控制方法,其特征在于,步骤1中所述固定翼模式的线性运动学和动力学模型如下:
其中,u为空速,v为迎角,w为侧滑角,φ为滚转角,θ为俯仰角,ψ为偏航角,p为滚转角速率,q为俯仰角速率,r为偏航角速率,x
[I
3.根据权利要求2所述的一种复合翼垂直起降无人机的姿态控制方法,其特征在于,所述固定翼模式的线性运动学和动力学模型的姿态控制输入为升降舵偏角、方向舵偏角和副翼舵偏角,反馈量为俯仰角、滚转角和偏航角。
4.根据权利要求1所述的一种复合翼垂直起降无人机的姿态控制方法,其特征在于,步骤1中所述多旋翼模式的线性运动学和动力学模型如下:
其中,d为旋翼电机到机体重心的距离,[G
5.根据权利要求4所述的一种复合翼垂直起降无人机的姿态控制方法,其特征在于,所述多旋翼模式的线性运动学和动力学模型的姿态控制输入为机体坐标系的三轴力矩u
所述区间二型模糊神经网络的输入为期望姿态角与反馈姿态角偏差及期望姿态角与反馈姿态角偏差的导数。
6.根据权利要求1所述的一种复合翼垂直起降无人机的姿态控制方法,其特征在于,步骤2中,所述PD控制器的控制方程如下:
其中,u
7.根据权利要求6所述的一种复合翼垂直起降无人机的姿态控制方法,其特征在于,所述区间二型模糊神经网络主要包括输入层、隶属函数层、规则层和输出层;
区间二型模糊神经网络的模糊规则为:
IF x
其中,x
输入层:由两个神经元组成;
X=[x
隶属函数层:采用椭圆二型隶属函数,其上下界表示为:
其中,
规则层:该层每个节点表示一条模糊规则,并使用代数乘积来匹配模糊规则的前件;
其中,
输出层:区间二型模糊神经网络的输出为:
其中,q为区间二型模糊神经网络前件输出隶属函数的下界比例值,f
8.根据权利要求1所述的复合翼垂直起降无人机的姿态控制方法,其特征在于,所述加权系数的计算式如下:
其中,V
9.根据权利要求8所述的复合翼垂直起降无人机的姿态控制方法,其特征在于,所述加权系数,以及转换模式的伺服指令确定方法如下:所述转换模式下固定翼执行机构的伺服指令u′
u′
u′
其中,u
说明书
技术领域
本发明属于飞行器控制技术领域,特别涉及一种复合翼垂直起降无人机的姿态控制方法。
背景技术
近几年来,复合翼垂直起降无人机引起了大量研究人员的关注。固定翼和旋翼的复合设计使其成为具有垂直起降、定点悬停、低速稳定飞行能力的旋翼无人机和具有高效、高速飞行能力的固定翼无人机的完美结合体。
复合翼垂直起降无人机不需要跑道以及配套的保障设施和相关工作人员,可以被部署到城市街道、山地丘陵、森林沙漠等地面环境复杂的地方,在石油管道巡检、电力巡检、土地测绘、森林防火、环境保护等领域得到广泛的应用。
复合翼垂直起降无人机有两套动力系统,当无人机以固定翼模式飞行时,旋翼的结构会产生扰动;处于旋翼模式时,固定翼舵面和动力机构的转动惯量相较正常运行时增大,机动能力减弱,抗风能力变差;处于转换模式时,其数学模型非线性较强,不易解析。
目前复合翼垂直起降无人机常用的姿态控制算法为比例积分微分(PID)算法,在旋翼和固定翼飞行模式下,PID参数不同,且过渡模式根据空速或时间对控制结果进行权重分配。PID不依赖无人机模型,原理简单且适用面较广,但由于该算法的不确定性,会导致模型控制性能不佳、易产生超调和振荡、且具有鲁棒性差等问题。
随着复合翼垂直起降无人机的应用越来越广,对于任务精度的要求也相应提升,因此提高无人机在自身精确模型缺失、复杂工作环境(例如内部传感器噪声和多风和恶劣天气中)以及自身重量改变(例如携带任务载荷和动力燃料)等情况下的鲁棒性变得极为重要。迫切需要发展一种更为高效的复合翼垂直起降无人机姿态控制方法,以提高其姿态控制的鲁棒性和自适应能力。
发明内容
为解决上述问题,本发明提供了一种复合翼垂直起降无人机的姿态控制方法,可以在模型不确定、工作环境复杂以及无人机参数改变等情况下保持控制器的鲁棒性和稳定性,提高姿态跟踪精度。
本发明采用如下技术方案来实现:
一种复合翼垂直起降无人机的姿态控制方法,包括以下步骤:
步骤1、建立复合翼垂直起降无人机,在固定翼模式或多旋翼模式下的非线性运动学和动力学模型;
步骤2、构建复合翼垂直起降无人机在固定翼模式或多旋翼模式下的姿态控制系统;
所述姿态控制系统包括PD控制器和区间二型模糊神经网络;
所述PD控制器的输出,用于训练区间二型模糊神经网络;
所述PD控制器输出和区间二型模糊神经网络输出的差,用于输出姿态控制指令控制;
步骤3、将步骤1非线性运动学或动力学模型的反馈输入至姿态控制系统,得到固定翼模式或多旋翼模式下的姿态控制指令,根据姿态控制指令控制复合翼垂直起降无人机在固定翼模式或多旋翼模式下的飞行姿态。
优选的,步骤1中所述固定翼模式的线性运动学和动力学模型如下:
其中,u为空速,v为迎角,w为侧滑角,φ为滚转角,θ为俯仰角,ψ为偏航角,p为滚转角速率,q为俯仰角速率,r为偏航角速率,xg和yg分别为地面坐标系中x轴位移和y轴位位移,h为飞行高度;
[Ixx Iyy Izz]为机体坐标系的三轴转动惯量,Ixz为惯性积,[Fx Fy Fz]为合外力在机体坐标系三轴的分量,[Mx My Mz]为合外力矩在机体坐标系三轴的分量。
优选的,,所述固定翼模式的线性运动学和动力学模型的姿态控制输入为升降舵偏角、方向舵偏角和副翼舵偏角,反馈量为俯仰角、滚转角和偏航角。
优选的,,步骤1中所述多旋翼模式的线性运动学和动力学模型如下:
其中,d为旋翼电机到机体重心的距离,[Gφ Gθ Gψ]为旋翼螺旋桨的陀螺力矩,CT和CM分别为螺旋桨的拉力系数和转矩系数,[ω1 ω2 ω3 ω4]为螺旋桨转速,[τx τy τz]为机体坐标系的三轴力矩。
优选的,,所述多旋翼模式的线性运动学和动力学模型的姿态控制输入为机体坐标系的三轴力矩umc=[τx τy τz]T,反馈量为俯仰角、滚转角、偏航角。
所述区间二型模糊神经网络的输入为期望姿态角与反馈姿态角偏差及期望姿态角与反馈姿态角偏差的导数。
优选的,,步骤2中,所述PD控制器的控制方程如下:
其中,e为期望姿态角与反馈姿态角的偏差, 为期望姿态角与反馈姿态角偏差的导数,kP和kD分别为PD控制器比例系数和微分系数。
优选的,,所述区间二型模糊神经网络主要包括输入层、隶属函数层、规则层和输出层;
区间二型模糊神经网络的模糊规则为:
IF x1 is and x2 is THENτf=fij,i=1,...,I,j=1,...,J
其中,x1和x2分别代表区间二型模糊神经网络的输入, 和 为输入区间二型模糊集,τf为输出变量,fij为区间二型模糊神经网络中后件网络的参数;
输入层:由两个神经元组成;
X=[x1 x2]T
隶属函数层:采用椭圆二型隶属函数,其上下界表示为:
其中, 和μ为椭圆二型隶属函数层神经元输出值的上下界,a1和a2为椭圆二型隶属函数不确定性的上下界,其中a1>1,0<a2<1,c和d为隶属函数神经元中心值和宽度。
规则层:该层每个节点表示一条模糊规则,并使用代数乘积来匹配模糊规则的前件。
Wij=μ1iμ2j,
其中, 为前件网络模糊规则的隶属度上下界;
输出层:区间二型模糊神经网络的输出为:
其中,q为区间二型模糊神经网络前件输出隶属函数的下界比例值,fij为区间二型模糊神经网络后件网络参数;
一种复合翼垂直起降无人机的姿态控制方法,当复合翼垂直起降无人机在转换模式下飞行时,将步骤3替换为如下步骤:
根据固定翼模式和多旋翼模式的控制系统,设计转换模式控制器,转换模式控制器根据空速变化计算加权系数;
根据固定翼模式和多旋翼模式的加权系数,分别确定固定翼执行机构和多旋翼执行机构的伺服指令;
根据伺服指令控制复合翼垂直起降无人机在转换模式下的飞行姿态。
优选的,,所述加权系数的计算式如下:
其中,V1为转换开始空速,V2为转换开始空速与转换结束空速之差,w为加权系数。
优选的,,所述加权系数,以及转换模式的伺服指令确定方法如下:所述转换模式下固定翼执行机构的伺服指令u′mc和多旋翼执行机构的伺服指令u′fw的确定方法如下:
u′mc=w·umc
u′fw=(1-w)·ufw
其中,umc和ufw分别为固定翼模式控制系统和多旋翼模式控制系统的输出值。
本发明具有如下有益的技术效果:
本发明提供的一种复合翼垂直起降无人机的姿态控制方法,通过建立固定翼模式和多旋翼模式的非线性运动学和动力学模型,以及固定翼模式和多旋翼模式的姿态控制系统,姿态控制系统采用PD控制器和区间二型模糊神经网络的结合,采用组合设计能够保证模糊神经网络在参数学习时的飞行器稳定性,其次也减少了复合翼垂直起降无人机在固定翼模式或多旋翼模式的控制误差,提高了控制的精度,保证了固定翼模式姿态控制系统和多旋翼模式姿态控制系统在工作时互不干扰,提高飞行的稳定性。
进一步,区间二型模糊神经网络采用椭圆二型隶属函数,相对于一型隶属函数具有更大的自由度,对具有不确定性的模型控制效果更好,可以进一步提高飞行器稳定性;
进一步,在转换模式时,转换模式控制器根据空速的变化获得加权系数,根据加权系数控制复合翼垂直起降无人机飞行姿态,减少了复合翼垂直起降无人机在转换模式的控制误差,提高了飞行器在复杂工作环境及自身重量改变等情况下的鲁棒性和稳定性,此外还使用空速的变化作为加权系数,使得转换模式更加平稳和高效。
附图说明
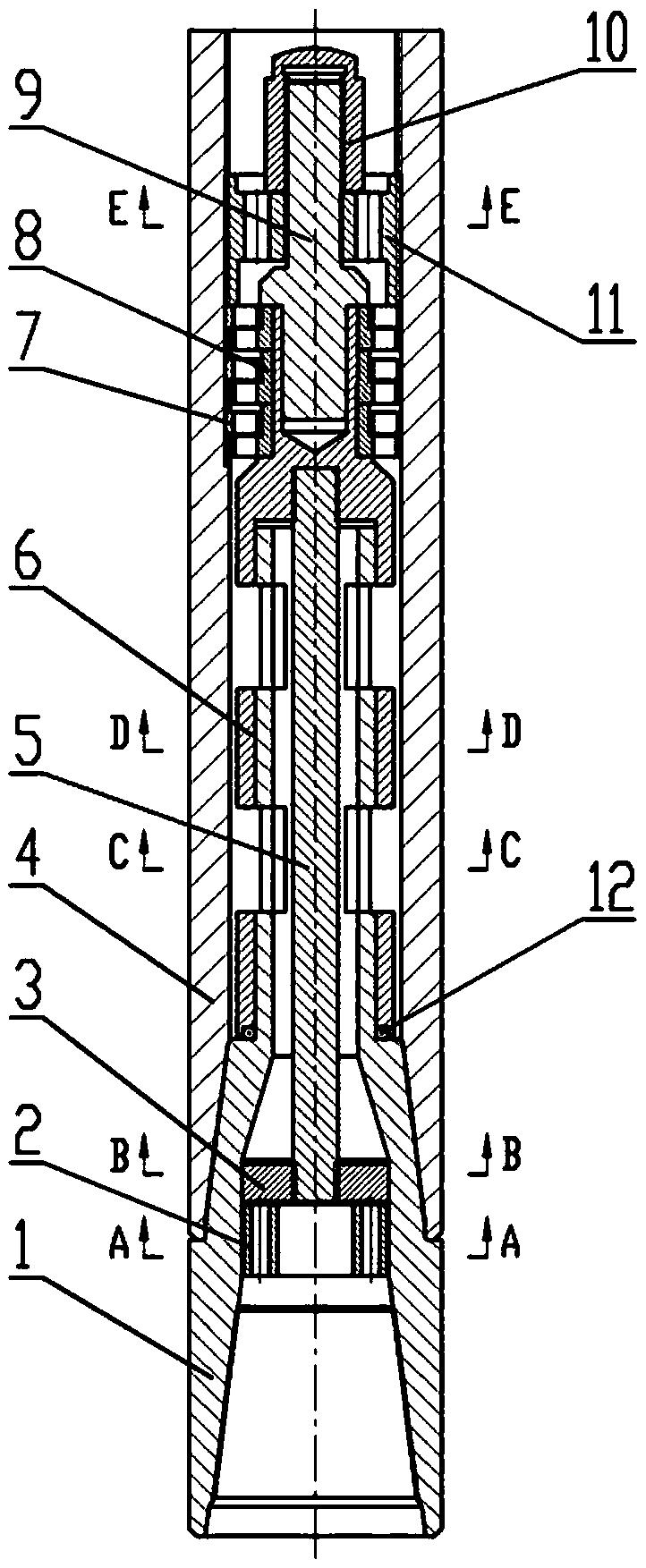
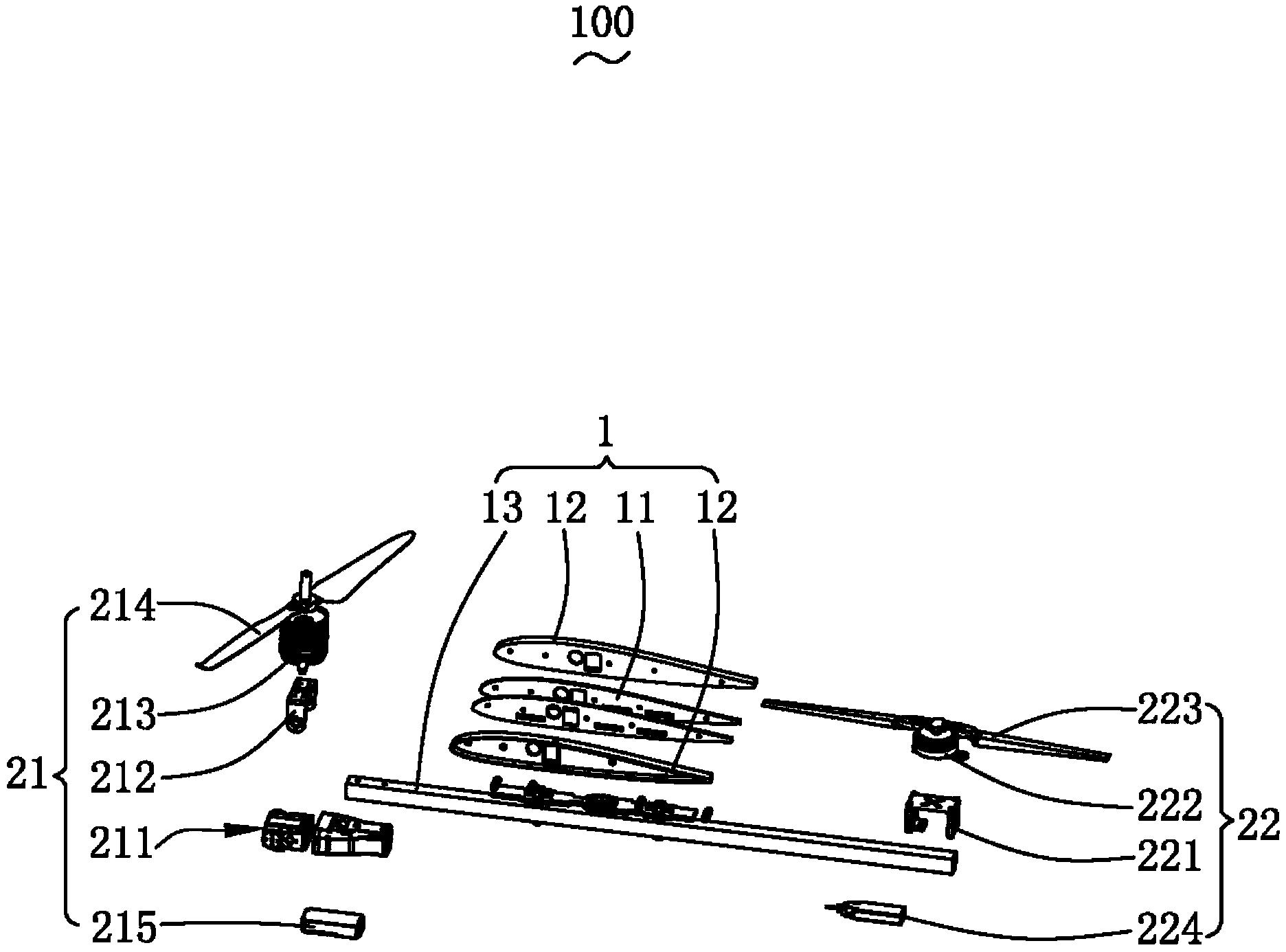
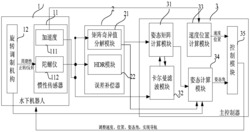
图1是复合翼垂直起降无人机结构;
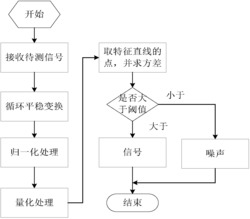
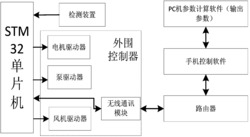
图2是基于区间二型模糊神经网络的复合翼垂直起降无人机姿态控制方法流程;
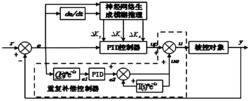
图3是复合翼垂直起降无人机姿态控制系统;
图4是复合翼垂直起降无人机转换模式控制方法。
具体实施方式
下面结合附图和具体实施例对本发明作进一步详细说明。
实施例1
一种复合翼垂直起降无人机姿态控制方法,包括以下步骤:
步骤1,建立复合翼垂直起降无人机,在固定翼模式或多旋翼模式下的非线性运动学和动力学模型。
参照图1,复合翼垂直起降无人机具有固定翼和四旋翼两套动力系统,针对该无人机建立固定翼模式和多旋翼模式下的非线性运动学和动力学模型,其中考虑外部干扰和模型不确定性。假设地面坐标系为惯性坐标系,忽略地球曲率,建立地面坐标系(Oexeyeze)和机体坐标系(Obxbybzb)。固定翼模式下的非线性运动学和动力学模型,如式(1)所示,解耦线性化后固定翼模式的姿态控制输入为升降舵偏角、方向舵偏角、副翼舵偏角,反馈量为俯仰角、滚转角。
多旋翼模式下的非线性运动学和动力学模型可用式(2)来表示,多旋翼模式的控制输入为机体坐标系的三轴力矩umc=[τx τy τz]T,反馈量为俯仰角、滚转角、偏航角。
式(1)和(2)中,[Ixx Iyy Izz]为机体系三轴转动惯量,Ixz为惯性积,[Fx Fy Fz]、[MxMy Mz]分别为固定翼模式下合外力在机体系三轴的分量、合外力矩在机体系三轴的分量,d为旋翼电机到机体中心的距离,[Gφ Gθ Gψ]为旋翼螺旋桨的陀螺力矩,CT和CM分别为螺旋桨的拉力系数和转矩系数,[ω1 ω2 ω3 ω4]为螺旋桨转速。
上述非线性运动学和动力学模型的反馈量,即反馈的姿态角,将输入姿态控制系统。
步骤2、分别构建复合翼垂直起降无人机在固定翼模式和多旋翼模式下的姿态控制系统。
参照图2和图3,姿态控制系统包括PD控制器和区间二型模糊神经网络。
PD控制器的输出用于训练模糊神经网络;
区间二型模糊神经网络的输入为期望姿态角与反馈姿态角偏差,以及期望姿态角与反馈姿态角偏差的导数。
固定翼模式的姿态控制系统中,输入指令为俯仰角和滚转角,偏航角的控制指令由协调转弯公式计算得到,多旋翼模式的姿态控制系统中,输入指令为俯仰角、滚转角和偏航角。
复合翼垂直起降无人机在固定翼模式和多旋翼模式下的PD控制器。PD控制器可表示为:
其中,e为期望姿态角与反馈姿态角的偏差,kP和kD分别为PD控制器比例系数和微分系数。
复合翼垂直起降无人机在固定翼模式和多旋翼模式下的区间二型模糊神经网络。,采用基于Takagi-Sugeno模型的双输入/单输出模糊神经网络体系,模糊规则为:
其中,x1和x2分别代表区间二型模糊神经网络的输入,即e和 和 为输入区间二型模糊集,τf为输出变量,fij为区间二型模糊神经网络中后件网络的参数。
区间二型模糊神经网络主要包括四层:输入层、隶属函数层、规则层、输出层,具体为:
(1)输入层:由两个神经元组成;
X=[x1 x2]T(5)
(2)隶属函数层:区间二型模糊神经网络的隶属函数具有不确定性,采用椭圆二型隶属函数,其上下界表示为:
其中, 和μ为椭圆二型隶属函数层神经元输出值的上下界,a1和a2为椭圆二型隶属函数不确定性的上下界,其中a1>1,0<a2<1,c和d为隶属函数神经元中心值和宽度。
(3)规则层:该层每个节点表示一条模糊规则,并使用代数乘积来匹配模糊规则的前件。
其中, 为前件网络模糊规则的隶属度上下界。
(4)输出层:区间二型模糊神经网络的最终输出为:
其中,q为区间二型模糊神经网络前件输出隶属函数的下界比例值,fij为区间二型模糊神经网络后件网络参数。
为保证系统的稳定性,采用滑模控制理论进行区间二型模糊神经网络的参数训练。滑模控制的滑模面为:
其中 代价函数定义为:
步骤3、将步骤1非线性运动学和动力学模型的反馈至输入至姿态控制系统,得到固定翼模式或多旋翼模式下的姿态控制指令,根据姿态控制指令控制复合翼垂直起降无人机在固定翼模式或多旋翼模式下的飞行姿态。
实施例2
参照图4,本发明还提供了复合翼垂直起降无人机,在固定翼模式和多旋翼模式下飞行时的姿态控制方法。
该方法与实施例1的姿态控制方法的步骤1和步骤2相同,不同之处在于步骤3,具体如下:
步骤3,根据固定翼模式和多旋翼模式的控制系统,设计转换模式控制器,转换模式控制器根据空速变化分别输出固定翼模式和多旋翼模式的加权系数;
根据固定翼模式的加权系数和多旋翼模式的加权系数,分别确定固定翼模式和多旋翼模式的伺服指令;
根据固定翼模式的伺服指令和多旋翼模式的伺服指令,根据伺服指令控制两套动力系统,进而控制固定翼模式和多旋翼模式下的飞行姿态。
转换模式控制器通过空速变化,加权输出固定翼模式和多旋翼模式的加权系数,加权系数表示为:
u′mc=w·umc(10)
u′fw=(1-w)·ufw(11)
其中,V1为转换开始空速,V2为转换开始空速与转换结束空速之差,w为加权系数,umc和ufw分别为固定翼模式控制系统和多旋翼模式控制系统的输出值,u′mc和u′fw分别为转换模式下输出到固定翼和多旋翼的伺服指令。
本发明提供的一种复合翼垂直起降无人机姿态控制方法,通过PD控制器和区间二型模糊神经网络的结合,并采用基于滑模控制理论的参数优化方法,设计固定翼模式和多旋翼模式下的姿态控制系统,最后根据空速的变化获得加权系数来进行转换模式控制,能够取得很好的控制效果。
进一步,本发明的组合设计能够保证模糊神经网络在参数学习时的飞行器稳定性,其次也提高了控制的精度;采用椭圆二型隶属函数,相对于一型隶属函数具有更大的自由度,对具有不确定性的模型控制效果更好;基于滑模控制理论的参数训练算法可以进一步提高飞行器稳定性;
进一步的,本发明提出的转换模式控制方法,保证了固定翼模式姿态控制系统和多旋翼模式姿态控制系统在工作时互不干扰,同时转换模式的控制也使转换阶段更加平稳和高效。
由上述内容可知,本发明建立了一种基于区间二型模糊神经网络的复合翼垂直起降无人机姿态控制方法,通过PD控制器和区间二型模糊神经网络的结合,采用基于滑模控制理论的参数优化方法,减少了复合翼垂直起降无人机在不同飞行模式的控制误差,提高了飞行器在复杂工作环境及自身重量改变等情况下的鲁棒性和稳定性,此外还使用空速的变化作为加权系数,使得复合翼垂直起降无人机转换模式更加平稳和高效。
一种复合翼垂直起降无人机的姿态控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0